
Abstract
This paper presents a macro-micro two-stage parallel experimental platform. The 3RRR macro planar parallel mechanism driven by the YASWAKA Σ-V series motor is to ensure the system’s large workspace. The 3RRR micro parallel mechanism based on compliant mechanism is driven by the pack-aged piezoelectric ceramics actuators (PPCA) which effectively guarantee the precision and accuracy of nanoscale positioning. In fact, the load characteristic is a basic index that affects the performance of the macro/micro combination mechanism. A displacement experiment is designed for the macro parallel mechanism to move in a straight line under different loads. The displacement is measured by the Renishaw laser interferometer. It is proved by the experiment that the precision and stability can be affected under different loads. The load characteristics research results and analysis in this paper are significant to the optimal design of a macro-micro dual-drive precision positioning planar parallel mechanisms for different applications.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
With the development of science and technology, Macro-micro combination planar nanopositioning platforms play an important role in precise and accurate nanoscale positioning. The use of macro-micro dual-drive positioning mechanism can make the system have a higher positioning accuracy in large stroke. In 1984, 1988 and 1993, Andre Sharon used macro-micro combination of ways to control and improve the accuracy of the robot in the United States Massachusetts Institute of Technology [1]. In 2009, John-Ahn Kim developed a large travel scanning station for the atomic force microscope [2]. In 2012, Ronnie Fesperman of University of North Carolina at Charlotte in the United States developed a macro-micro combination system by using a multi-linear motor to drive the macro moving platform and micro platform driven by Piezoelectric [3]. Many domestic units have also developed a variety of forms of macro-micro positioning system. In 2006, Jie Degang of Harbin Institute of Technology developed a high-speed & high-precision positioning system of Marco/-Micro Driving, the macro table was driven by VCM and the micro table by PZT [4].
In recent years, planar nanopositioners have been widely employed in precise and accurate nanoscale positioning, which involves nanoimprint lithography [5], precision mechanical scanning in scanning probe microscopy (SPM) [6], micro/nano manipulation [7], precision machining and micro-nano surface metrology measurement [8]. An operating system that can achieve nanoscale precision in the context of a large stroke in the process of research and machining is needed.
The accuracy of the large stroke drive (precision screw drive, linear motor, voice coil motor) is generally limited to the micron level. The positioning accuracy of micro-positioning platform represented by piezoelectric ceramic actuator can reach nanometer positioning accuracy. So the macro/micro dual-drive operating system possess both large stroke by motors and response fast, sub-nanometer resolution characteristics by piezoelectric ceramics actuators.
The macro/micro dual-drive system will develop into a variety of integrated ways in the future, especially in two dimensions and three dimensions. The macro-micro parallel mechanism can improve the positioning accuracy, but certain coupling characteristics will have impact in marco-micro combination. One of the most basic coupling characteristic is the effect of the micro platform as a load on the macro platform. Different weight of loads can greatly affect the precision and accuracy of the end positioner.
The paper presents a 3-DOF macro-micro combination mechanism. The remainder of the paper is organized as following: A macro-micro planar parallel mechanism is proposed in Sect. 2. Based on kinematic equation and Lagrange equation, the mathematical dynamics model of macro-parallel positioning mechanism is established and the effect factor of the load is analyzed in Sect. 3. Load effect experiment on macro planar parallel mechanism is introduced in Sect. 4, followed by a brief conclusion and prospect in Sect. 5.
2 Design of a Macro/Micro Planar Parallel Mechanism
As is shown in the Fig. 1, the configuration of the macro-micro combination system is expected to be designed to include the following parts: A macro 3RRR mechanism and a micro 3RRR mechanism to ensure both large stroke positioning and nanoscale positioning, the machine vision makes the system a closed loop feedback.

Configuration of the macro-micro combination system. Number components are: 1, 2, 8 computer for machine vision, macro 3RRR mechanism and micro 3RRR mechanism; 3 machine vision; 4 YASWAKA motor; 5 macro/micro combination; 6 PPCA controller; 7 capacitive sensors
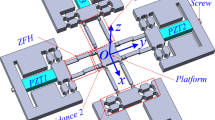
The basic structure of both the 3RRR micro and macro parallel mechanism are shown in the Fig. 2, which contains the PRBM and RBM model of both platform, followed with a macro-micro mechanism model.

(a) Rigid body model and pseudo rigid body model of 3RRR macro-micro mechanism (b) Prototype of 3RRR macro/micro mechanism (c) macro-micro combination model
The controlled model of each part of the macro-micro combination system is shown in Fig. 3. The macro-parallel mechanism ensured for large stroke positioning is 3-RRR mechanism, which consists of a three-way chain, including the moving platform as an end positioner, the base platform and the connection. Each branch contains three rotary hinges and two connecting rods, where R is the active hinge and the rest are the passive hinge. The macro-parallel mechanism is driven by the YASWAKA servo motor, controlled by the DMC-1886PCI bus motion controller. The YASKAWA motor has a 24-bit incremental encoder, and each pulse in the position control mode rotates 5.23 μrad so that the end accuracy of the mechanism can reach 1 μm.

Controlling model of the 3RRR macro/micro mechanism
The micro-parallel mechanism has three symmetrical kinematic chains connecting three actuators and a moving plate. Three packaged piezoelectric ceramic actuators (PPCA) (P-841.30, from PI Ceramic GmbH) with a closed-loop stroke of 45 μm were selected to drive the platform [9].
The PPCAs controlled by dSPACE are respectively mounted on three modular fixtures axially configured and located symmetrically on the circumference of a circle. The flexible hinge guide mechanism transmits the movement and force of the micro actuator’s output to the mobile platform. The selection and design guidance mechanism directly affects the final displacement output of the micro positioning platform. The micro-platform builds the mapping relationship between 16 size variables and seven main performance targets by establishing a multi-objective optimization model. The Pareto solution set is calculated by using the multi-objective particle swarm algorithm to determine the best individual under specific application requirements. The kinematics and dynamics model of the modeling compensation mechanism are obtained by the loss of the preload and the input displacement. In the drive SGS, the input and end of the establishment of three loops of the servo controller. Combining PI control algorithm, the accuracy and accuracy of end trajectory tracking has been improved.
3 Dynamic Modelling of the Macro-Parallel Mechanism
The Lagrange equation of the macro 3RRR mechanism can be written as [10]:
where \( m_{1} \) \( m_{2} \) \( m_{3} \) represent the mass of connecting rod \( A_{i} B_{i} \) \( B_{i} C_{i} \) and moving platform P, respectively. \( L_{1} \) and \( L_{2} \) stand for the length of connecting rod \( A_{i} B_{i} \) \( B_{i} C_{i} \). \( \frac{{\partial X_{P} }}{{\partial q_{ai} }},\frac{{\partial Y_{P} }}{{\partial q_{ai} }},\frac{{\partial \theta_{P} }}{{\partial q_{ai} }},\frac{{\partial \beta_{i} }}{{\partial q_{ai} }} \) can be solved by kinematics equation (Fig. 4).

Schematic diagram of macro 3RRR mechanism
From the analysis of system dynamics equation, we can infer that the macro 3RRR mechanism in different motion trajectory under the joint drive torque and drive energy consumption is very different. When the trajectory is straight and the load on the macro 3RRR mechanism increases, the driving torque and energy consumption of all active joints are significantly increased. Due to the PID parameters of YASKAWA motor which drives the 3RRR macro mechanism cannot be adjusted, the only way to improve positioning performance is to adjust the weight of the load to a suitable value via experiment. It is in Sect. 4 that we describes how to use experimental methods to optimize the design of the macro/micro combination mechanism.
4 Load Effect on Macro Planar Parallel Mechanism
We fixed the 1 kg, 2 kg, 3 kg weight as different quality loads on the macro planar parallel mechanism compared with the no load situation. First we use the software to control the host computer to adjust the Macro planar parallel mechanism until the end platform moving to the initial position and the corner angle of the platform is 0°. Then the host computer is used to guide the macro mechanism moved to [0, −13]. Then Start the preset run program to control the motion of the platform moving back and forth from [0, −13] to [0, 13], The macro planar parallel mechanism has a stop time of 1 s after each movement of 1 mm. The laser interferometer (XL-80, from Renishaw Inc.) recorded the entire process at 2500 Hz sampling frequency, recording 2500 dots per second (Figs. 5 and 6).

Test setup of positioning system. Number components are: 1 host computer; 2 YASWAKA motor; 3 weight; 4 macro 3RRR mechanism; 5 Renishaw laser interferometer

(a) Experimental displacement diagram of macro positioning mechanism (b) Partial magnification diagram at the displacement of [0, 5]
As the macro positioning mechanism stop for 1 s time’s interval after each 1 mm displacement, we can obtain 27 stop points’ data from [−13, 0] to [13, 0]. Firstly, the value filter of measured data by the laser interferometer was realized with MATLAB software system, which eliminate the coarse error. And then in the MATLAB software system, 400 consecutive points are selected from the 2500 sampling points, and the maximum difference of these continuous sampling points is less than 1 μm. The average value of 400 sampling points is taken as the absolute position of the end of macro 3RRR planar parallel mechanism at the displacement point.
Selecting 20 consecutive points in each of the 27 displacement points from [0, −13] to [0, 13], we can get 5 sets of data from −13 to 13 in the five round trip test. The five sets of data are put together to find the standard deviation of each displacement point. As the Fig. 7 shows, we compare the standard deviation to evaluate the stability of macro 3RRR planar parallel mechanism under 4 different loads when it passes through each displacement point in the same way.

Standard deviation of 19 point
Besides, as the Fig. 8 show, we take the difference between the absolute position of the macro 3RRR planar parallel mechanism at each point and the point on the coordinate axis as the absolute positioning accuracy.

Absolute positioning accuracy of 19 points
As shown above, we can get conclusions about the macro-micro combination mechanism under 4 different weight loads displacement and the same speed (2 mm/s), Within a certain range (0–3 kg) with the increase of the load quality of the simulated micro-motion platform, the repeatability of the macro-micro combination mechanism is also increased.
However, different from repeat positioning accuracy, the absolute positioning accuracy of the macro and micro combination mechanism decreases with the increase weight of load in the range of 0–3 kg.
Therefore, the design of a load ranging from 1 kg to 2 kg in the micro 3RRR can make macro-micro combination mechanism to obtain a good repeatability positioning accuracy and absolute positioning accuracy.
5 Summary and Prospect
The paper presents the experimental investigation of a macro-micro combination mechanism. A macro-micro combination mechanism which can achieve plane 3DOF movement is proposed. The experimental results demonstrate that that the positioning precision and stability can be greatly affected by different loads. The main contribution of the study is the experimental methods to find the weight of the loads between certain range of weight. The method provided an effective solution. The experimental results are important for the implementation of mechanism design and further macro-micro-combination experiments.
Future research will focus on the coupling characteristics of the macro-micro combination system. In order to realize the closed loop feedback, one can add machine vision to the system. Moreover, applying different intelligent control strategies to improve the positioning precision, trajectory tracking accuracy and dynamic performance at a higher velocity is needed.
References
Sharon, A., Hardt, D.: Enhancement of robot accuracy using endpoint feedback and a macro-micro manipulator system. In: American Control Conference, pp. 1836–1845. IEEE (1984)
Ahn, J., Kim, J.A., Kang, C.S., et al.: A passive method to compensate nonlinearity in a homodyne interferometer. Opt. Express 17(25), 23299–23308 (2009)
Fesperman, R., Ozturk, O., Hocken, R., et al.: Multi-scale alignment and positioning system – MAPS. Precis. Eng. 36(4), 517–537 (2012)
Degang, J.: Research of the high-speed/high-precision positioning system of marco/micro driving. Harbin Institute of Technology (2006)
De Jong, B.R., Brouwer, D.M., De Boer, M.J., et al.: Design and fabrication of a planar three-DOFs MEMS-based manipulator. J. Microelectromech. Syst. 19(5), 1116–1130 (2010)
Eigler, D.M.: Positioning single atoms with a scanning tunnelling microscope. Nature 344(6266), 524–526 (1990)
Howell, L.L.: Compliant mechanisms. In: 21st Century Kinematics, pp. 457–463. Springer, London (2013)
Fatikow, S., Wich, T., Hulsen, H., et al.: Microrobot system for automatic nanohandling inside a scanning electron microscope. IEEE/ASME Trans. Mechatron. 12(3), 244–252 (2007)
Wang, R., Zhang, X.: Optimal design of a planar parallel 3-DOF nanopositioner with multi-objective. Mech. Mach. Theory 112, 61–83 (2017)
Qinghua, Z.: Research on elastodynamics modeling and active vibration control of planar 3-RRR flexible parallel robots mechanism. South China University of technology (2013)
Acknowledgments
This research is supported by the National Natural Science Foundation of China (Grant Nos. U1501247, U1609206), the Natural Science Foundation of Guangdong Province (Grant No. S2013030013355), the Scientific and Technological Project of Guangzhou (Grant No. 2015090330001), and the Science and Technology Planning Project of Guangdong Province (Grant No. 2014B090917001). The authors gratefully acknowledge these support agencies.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Yu, J., Wang, R., Zhang, X. (2017). Experimental Study on Load Characteristics of Macro-Micro Dual-Drive Precision Positioning Mechanism. In: Huang, Y., Wu, H., Liu, H., Yin, Z. (eds) Intelligent Robotics and Applications. ICIRA 2017. Lecture Notes in Computer Science(), vol 10463. Springer, Cham. https://doi.org/10.1007/978-3-319-65292-4_40
Download citation
DOI: https://doi.org/10.1007/978-3-319-65292-4_40
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65291-7
Online ISBN: 978-3-319-65292-4
eBook Packages: Computer ScienceComputer Science (R0)