
Abstract
Uncertainties in aircraft structures modeling and measurements always lead to unreliable results of damage detection and estimation due to the lack of sufficient information of the reality. In this paper, a fuzzy logic system is designed and formulated to monitor and assess the structural damage of the aircraft in a way that even though the information is influenced by uncertainties, it can still find a balance between accuracy and practical use. The structural damage is modeled as different scales of tip loss of one of the three main aerodynamic surfaces: horizontal stabilizers, vertical tail and wings. For normal aircraft there are no onboard sensors that are directly related to the integrity of the structure, therefore in this paper the identified aerodynamic coefficients are adopted as damage indicators as well as the inputs to the fuzzy inference system (FIS). The implicit relationship between these indicators and structural damage has been investigated by a series of wind-tunnel and computational experiments. The performance of the proposed method is evaluated at different levels of noises, and it is shown that even the success rate of the damage pattern recognition decrease when higher noise level is applied, the fuzzy logic system can still give satisfactory results.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


1 Introduction
The maintenance of safe and reliable performance of flight vehicles is always highly demanded, for the flight transportation system are an indispensable support for the modern society and world economy. However, in spite of high-level redundancy systems, aircraft still has the risk of faults and failures in three major parts, which are generally referred to as sensors, actuators and airframe. Specifically, fault detection and isolation (FDI) methods on sensors and actuators have been intensively used and well developed [1]. The integration of these technologies generate multiple choices and attractive issues in preventing accidents due to degrading mechanical properties like fatigues, cracks and debonding, which are generally categorized as structural health monitoring (SHM). A multitude of various SHM methods as well as nice reviews can be found in literature [2, 3].
Generally the approaches taken in SHM are classified into physics-based type and data-based type [3]. The conventional physics-based methods rely on identification techniques such as the estimation of structure stiffness and model parameters, which are considered deterministic without uncertainties. The problem with this method is that it’s difficult to evaluate the reliability of the estimated damage case. On the other hand, the data-driven approach takes more considerations into uncertainties, which relies on system measurements for training and assessment. Nevertheless, the data-based method sometimes may lack insights into the nature of the damage, which makes it less ‘physical’, or straightforward. Various methods have been developed to find a balance between the two approaches and enhance the confidence in damage diagnosis in the existence of uncertainties. However, successful applications of these methods in flight vehicles face a lot of technical challenges. One difficulty is the acquisition of extensive training data from repetitive experiments and onboard sensors. Also, the knowledge of damage location and damage type are not always well known a prior, and the operational and environmental conditions sometimes vary significantly due to diverse uncertainties [3]. So the main focus of this paper is on dealing with aircraft structural damage under uncertainties.
One of the approaches dealing with uncertainties as well as the lack of deterministic knowledge is based on fuzzy logic, which provides a potential way of sufficient training and accurate pattern recognition based on imperfect data. The damage type can be determined by fuzzy set method through the assignment of membership functions to each input. Various literature [2,3,4,5,6,7,8,9,10] can be found using fuzzy logic to detect and assess structural damage of composites in various applications of industries. Most of the methods use non-destructive vibration-based data like natural frequencies, material properties like Young’s moduli, mode shape curvatures and stiffness based on finite element models. For aircraft, however, there are no such onboard sensors to provide real-time data for monitoring and diagnosing. In order to determine which part of the aircraft (e.g. fuselage, wings, tails) is under crisis, new damage indicators need to be defined using information that already existed onboard. Therefore, in this paper a different way of detecting and estimating aircraft structural damage is proposed by using aerodynamic coefficients of moments and forces as featured inputs to the fuzzy logic system.
2 Modeling of Aircraft Structural Damage
One major bottleneck for damage assessment of aircraft is that repeated destructive experiments are hardly feasible, thus there’s little real flight data for analysis. However, with the increasing concern for the safety of civil airliners, a number of experiments on subscale models in windtunnel and Computational Fluid Dynamics (CFD) software have been conducted to satisfy the expanding need for multiple sources of data. Earlier researches done by NASA Langley Research Center are a series of wind tunnel tests on a swept-wing airplane model to determine the effects of simulated wing damage on the aerodynamic characteristics of the model at Mach numbers larger than one. Wing damage was simulated by removal of either a leading-edge or a trailing-edge portion or an entire wing panel [11]. In recent years, the Generic Transport Model (GTM), a \( 5.5\% \) scale model of a commercial airplane has been the subject of a series of extensive wind tunnel tests and CFD experiments [12] undertaken by NASA for the exploration of loss-of-control events involving various contributions such as stall/ high-angle-of-attack, airframe damage and icing [13].
With the aid of these data and reports, the aerodynamic characteristics of the partially damaged aircraft can be studied, which provides the theoretic foundation of our paper. The effect of structural damage is mainly a combination of aerodynamic change, mass property shift and control degradation. The control effectiveness can be evaluated in a relatively independent way through the isolation of actuator faults by advanced actuators fault detection systems. Mass properties, seem not have a substantial effect on flight characteristics compared with the impact of aerodynamic forces and moments, according to an experiment conducted by Shah [14], in which a large, asymmetric mass change (physical separation of an engine) was modeled. In this paper we mainly focus on the aerodynamic effects of structural damage based on the wind tunnel tests conducted by Shah et al. [14, 15], in which the damage in the form of partial or total tip loss is applied to three major parts of the aircraft that provides aerodynamic forces and moments: the horizontal tails, the vertical tail, and the wings [16]. In order to correctly identify the damage type, we need to model the damage in a simple but general way that can reflect the trend of experimental damage data.
2.1 Horizontal Stabilizer Damage
The horizontal stabilizers provide the only stabilizing contribution to pitching moment. So the damage to horizontal stabilizers often causes significant changes in both static and dynamic longitudinal stability. When damage occurs, a steady decrease in pitching moment is most likely to happen. A trend from negative to positive (unstable) in \(C_{m_{\alpha }}\) with increasing area of damage is observed in the wind tunnel data. As an important indication of dynamic stability, the pitching damping \(C_{m_{q}}\) over the angle of attack range is reduced with the scale roughly proportional to the ratio of tip loss.
2.2 Vertical Tail Loss
The effect of vertical tail damage on directional characteristics is similar to that of horizontal tail damage on pitch axis, and it rarely induces incremental rolling moments since the damage is basically symmetric. The change in lateral static and dynamic stability is seen as a steady decrease in yawing moment at the same angle of sideslip with increasing size of tip loss. As to static stability, the value of \( C_{n_{\beta }} \) experiences a progressive decrease proportional to the scale of damage at the same angle of attack, but the change with respect to \( \alpha \) remains almost the same. Yaw damping steadily decreases and approaches to zero (unstable limit) with the increase of the damage area.
2.3 Wing Damage
The wing damage is different from tail damage in the progressive reduction of lift curve slope versus angle of attack. More importantly, wing tip loss also results in incremental rolling moment due to unequal normal force contributions from the left wing to the right wing, which are roughly proportional to damaged scale at given angle of attack.
2.4 Aerodynamic Coefficients as the Damage Indicator
As is explained before, the conventional damage indicators for structural monitoring and diagnosing are not available due to limited onboard sensors. Instead, the measured translational accelerates \( A_{(x,y,z)_{m}} \) and the rotational rates \( p_{m},q_{m},r_{m} \) from inertial navigation system (INS) are used to calculate the dimensionless forces and moments of the aircraft [17]:
where \( C_{L} \) denotes the dimensionless aerodynamic lift force.
These calculated forces and moments are closely related to the integrity of aircraft components. Moreover, based on the discussion on wind tunnel results, the structural damage directly influences the value of aerodynamic coefficients, which means that we can use estimated aerodynamic coefficients as the damage indicators through least squares based on the following model structure:
The damage indicators are listed in Table 1. It is noticed that different aerodynamic coefficients are picked on which different damage cases have the most dominant influence. That is how we distinguish between two different damage locations based on the value of their unique damage indicators.

Schematic representation of a fuzzy inference system
3 Formulation of Fuzzy Logic System
Unlike what we listed in Table 1, the actual damage cases are never deterministic. Even if we have all the time and condition to collect data from a given airplane, it would be impossible to obtain all the information to predict all the possible phenomena. Under the situation of uncertainties, what we can do is to make generalizations and predictions of the current and future system behaviors based on the past experience and data [3]. Specifically, we need to use inductive reasoning and inference to find a balance between the vague, uncertain world and its precise, deterministic estimation. By using linguistic variables, fuzzy logic system is a marvelous tool that provides a possible way of dealing with vagueness and imprecision of information from limited experiments. In this paper, a fuzzy logic system is designed and integrated in the problem of damage assessment of the aircraft using aerodynamic coefficients as damage indicators.
As is illustrated in Fig. 1, a fuzzy Inference system (FIS) is basically composed of five functional blocks, in which the rule base contains a number of fuzzy if-then rules that need to be generated or trained offline and the membership functions of the fuzzy sets used in the fuzzy rules are stored in the database for retrieval. The fuzzification process transforms the crisp inputs into degrees of match with linguistic variables using membership functions. A decision-making unit will then be used to performs the inference operations on the rules, i.e. to map fuzzy sets to fuzzy sets and determines the way they are combined. Finally, the defuzzifier again transforms the fuzzy values into crisp results [4, 7].
3.1 Input and Output
The inputs to the fuzzy logic system are the aerodynamic coefficients listed in Table 1, which are identified from measured forces and moments according to Eq. 3. The outputs are the location and severity of structural damage expressed in linguistic variables. Mathematically, FLS performs a mapping from crisp inputs x to outputs y [4, 7]:
The linguistic variables describing damage parts include four aerodynamic surfaces of the aircraft, which are horizontal tail (HT), vertical tail (VT), left wing (LW), right wing (RW). Each variable is split into a set of terms covering its universe of damage severity like:
In this paper, we only consider single damage for simplicity, and each damage case is simulated in the well-developed DASMAT citation model in a Maltab/Simulink environment with measurement noises, based on which the aerodynamic coefficients are identified via recursive least squares. The damaged aircraft model is modeled as a linear change to the original model of total forces and moments from aerodynamic look-up table:
For each damage location and severity level, the changed values of aerodynamic forces and moments are list in Table 2. Due to limited sources of data, the figures in the table are assigned based on the information like changing magnitude and gradient abstracted from the experimental results done by others. So the table does not represent the aerodynamic changes of damage in a numerically precise way, but only for the proof of concept and the feasibility of algorithms adopted in this paper. Further improvements might be obtained with more experimental data and thorough analysis.

The identified damage indicators for horizontal stabilizer tip loss

The identified damage indicators for vertical tail tip loss

The identified damage indicators for left wing tip loss
The identified aerodynamic coefficients under three damage cases are displayed in Figs. 2, 3 and 4. For wing damage only the results of left wing are shown because the figures of right wing has little difference with the left wing only with some signs reversed. The simulation time is 10 s, and all the coefficients have converged to stable values, which shows clearly the aerodynamic effects of different scales of structural damage.
3.2 Fuzzification
After obtaining the input data, the next step in FIS is fuzzification, where the inputs are transformed into degrees of membership of the linguistic variables calculated from the membership functions \( \mu (x) \), which takes on the values between 0 and 1 [4, 7]. Fuzzy sets with Gaussian membership functions are used for the input variables, which are defined as:
where m is the midpoint of the fuzzy set and \( \sigma \) is the standard deviation associated with each linguistic variable. In this application, the linguistic variables for numerical inputs are defined below:
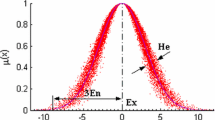
The membership function of each damage indicator, i.e. aerodynamic coefficients are displayed in Fig. 5.

The input membership function of each damage indicator

The output membership function of each damage part of the aircraft
3.3 Rule Generation and Inference Engine
Rules for the fuzzy system can be expressed as [4, 7]:
where \( F_{i}\in V_{i} \) and \( K_{i}\in W \) are fuzzy sets characterized by membership functions \( \mu _{F_{i}} \) and \( \mu _{K_{i}} \). Each rule corresponds to one class, i.e., damage pattern in our application.
The rules can be either defined or trained through a supervised learning. Each rule can be evaluated by applying fuzzy operator and implication method. For the IF part, which is also called the antecedent, the fuzzy operator is applied to obtain one number by combining the input membership degree of each part of the antecedent. Various types of fuzzy operators could be taken. In this paper we pick the AND operation which multiplies all the membership degrees of the inputs for each rule:
The resulting number is then applied to the output membership function \( \mu _{K_{i}} (y) \), as is illustrated in Fig. 6 and implication process is implemented for each rule as:
Given the input and output membership function, the training and generation of fuzzy rules can be followed by the procedure explained below [4, 7]:
-
1.
Each given damage case is simulated in the aircraft model according to Table 2 and the corresponding damage indicators are identified. The membership degrees of each damage indicator are calculated through the input membership functions
-
2.
For each damage indicator having four degrees of membership based on the linguistic measures in Eq. 8, select the membership with the maximum degree.
-
3.
One rule is obtained for each damage case by combining all the damage indicators with linguistic measures having maximum membership degrees.
Based on the above procedure, the trained rules from simulation data are displayed in Table 3.
3.4 Defuzzification
Once the fuzzy rule are applied to a given input, we have a set of degree of memberships for each damage pattern. Widely used defuzzification methods include maximum matching and centroid defuzzification. The latter one is often used when a crisp output value is required, while in pattern recognition we only need to know the class index [4, 7]. So in this paper, maximum matching is used to find the class which has the maximum matching degree of the rules. Finally the damage pattern with the highest degree of membership is selected containing the information of damage location as well as damage severity.
3.5 Damage Pattern Recognition Using Fuzzy Logic
To validate the methods proposed in this paper, validation data are generated from the DASMAT simulation model on which four levels of damage severity for different parts of the aircraft are applied. In order to test how well the proposed FIS deal with uncertainties, noises with four different signal-to-noise ratios (SNR) are added in to simulate the uncertainty present in experimental measurements and modeling process. For each case, one thousand noisy data points are generated. The performances is evaluated by success rate, which is the ratio of the damage cases that are correctly recognized by the FIS. Figure 7 shows the results of different noise levels for damage in left horizontal stabilizer, vertical tail and left wing respectively. It can be observed that the success rate increases when larger SNR, i.e., less noises are applied, and the success rates of severe damage are slightly lower then that of less severe damage.

The success rate of damage pattern recognition at different locations and noise levels
4 Conclusion
A new method using fuzzy logic for damage pattern recognition is proposed and implemented in this paper to compensate for the limited experimental condition and data of damaged aircraft. The aerodynamic coefficients sensitive to the integrity of the aerodynamic surfaces are picked as damage indicators. The selected coefficients are estimated, fuzzified and mapped to a damage case via a set of fuzzy rules. Simulation results show that by using FIS, the damage pattern recognition can deliver vague but useful information on the health condition of the aircraft. Future work can be done to enhance the accuracy of the method by using neural networks to train the membership functions and fuzzy rules so that the parameters of FIS can always be updated with new incoming measurement information.
References
Hwang I, Kim S, Kim Y, Seah CE (2010) A survey of fault detection, isolation, and reconfiguration methods. IEEE Trans Control Syst Technol 18(3):636–653
Bakhary N, Hao H, Deeks AJ (2007) Damage detection using artificial neural network with consideration of uncertainties. Eng Struct 29(11):2806–2815
Lopez I, Sarigul-Klijn N (2010) A review of uncertainty in flight vehicle structural damage monitoring, diagnosis and control: challenges and opportunities. Prog Aerosp Sci 46(7):247–273
Chandrashekhar M, Ganguli R (2009) Damage assessment of structures with uncertainty by using mode-shape curvatures and fuzzy logic. J Sound Vib 326(3–5):939–957
Chandrashekhar M, Ganguli R (2009) Uncertainty handling in structural damage detection using fuzzy logic and probabilistic simulation. Mech Syst Signal Process 23(2):384–404
Fang X, Luo H, Tang J (2005) Structural damage detection using neural network with learning rate improvement. Comput Struct 83(25–26):2150–2161
Ganguli R (2001) A fuzzy logic system for ground based structural health monitoring of a helicopter rotor using modal data. J Intell Mater Syst Struct 12(6):397–407
Jang JSR (1993) ANFIS: adaptive-network-based fuzzy inference system. IEEE Trans Syst Man Cybern 23(3):665–685
Taha MMR, Lucero J (2005) Damage identification for structural health monitoring using fuzzy pattern recognition. Eng Struct 27(12):1774–1783
Takagi H, Hayashi I (1991) NN-driven fuzzy reasoning. Int J Approx Reason 5(3):191–212
Hayes C (1968) Effects of simulated wing damage on the aerodynamic characteristics of a swept-wing airplane model
Frink N, Pirzadeh S, Atkins H (2010) CFD assessment of aerodynamic degradation of a subsonic transport due to airframe damage. In: 48th AIAA aerospace sciences meeting, Orlando
Shah G, Foster J, Cunningham K (2010) Simulation modeling for off-norminal conditions-where are we now? In: AIAA modeling and simulation technologies conference, Toronto
Shah G, Hill M (2012) Flight dynamics modeling and simulation of a damaged transport aircraft. In: AIAA modeling and simulation technologies
Shah G (2008) Aerodynamic effects and modeling of damage to transport aircraft. In: AIAA guidance, navigation and control conference and exhibit
Zhang, Y., de Visser, CC., Chu, QP (2016) Online physical model identification for database-driven safe fight envelope prediction of damaged aircraft. In: AIAA atmospheric flight mechanics conference, pp 1–11, January 2016
Tol HJ, Visser CCD, Sun LG, Kampen EV, Chu QP (2016) Multivariate spline-based adaptive control of high-performance aircraft with aerodynamic uncertainties. J Guid Control Dyn 39(4):781–800
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper

Cite this paper
Zhang, Y., de Visser, C.C., Chu, Q.P., van Kampen, E.J. (2018). Aircraft Damage Pattern Recognition Using Aerodynamic Coefficients and Fuzzy Logic. In: Dołęga, B., Głębocki, R., Kordos, D., Żugaj, M. (eds) Advances in Aerospace Guidance, Navigation and Control. Springer, Cham. https://doi.org/10.1007/978-3-319-65283-2_18
Download citation
DOI: https://doi.org/10.1007/978-3-319-65283-2_18
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65282-5
Online ISBN: 978-3-319-65283-2
eBook Packages: EngineeringEngineering (R0)