
Abstract
In this chapter, we propose an adaptive sliding mode approach based on the extended equivalent control concept to cope with disturbances of unknown bounds in nonlinear systems. Some advantages with respect to previous proposed methods are its simplicity and capability of rejecting non smooth disturbances. Unlike other adaptive approaches, overestimation of the controller gain and the loss of the sliding motion can be avoided. The developed method guarantees ideal sliding modes and alleviates the chattering phenomena. Theoretically, the sliding variable becomes identically null after some finite time in spite the disturbances. Global stability is proved. Simulation results illustrate the potential and limitations of this novel adaptation strategy.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


1 Introduction
Many authors have been dedicating their work to remove the obstacle of considering bounded disturbances with known bounds in the sliding mode control design [2,3,4,5, 14, 17, 18, 22, 23]. This research topic is of practical significance because the control magnitude is often related with the chattering intensity in actual applications. Overestimated disturbances may lead to nonminimum chattering [22].
Generally, adaptive sliding mode controllers can be classified as follows:
-
1.
Schemes based on monotonically increasing gains [14, 17, 23];
-
2.
Strategies with increasing and decreasing gains [2, 5, 18]; and
- 3.
The benefit of the latter approach is that once the sliding motion begins, an accurate estimate of the disturbance can be obtained. If the disturbance decreases, the equivalent control does automatically the same. It means that if the control gain is updated according to the equivalent control, a less conservative controller in terms of control effort and improved performance can be obtained. Although the equivalent control cannot be measured precisely in practice due to model mismatches, a good approximation is the average control signal [21].
In this chapter, a novel adaptive sliding mode control strategy based on the extended equivalent control [8, 9] is developed [15]. The adaptation rule combines the qualities of monotonically increasing gains and the equivalent control. During the reaching phase, a positive feedback loop increases the control gain (modulation signal) until the disturbances are dominated. After that, the conditions for the sliding mode phase can be satisfied. Thus, the disturbances bounds can be satisfactorily estimated by the equivalent control which updates the proposed modulation function. The modulation gain is adapted in such a way that it is small as possible to mitigate chattering effects, but large enough to ensure the existence of the sliding mode in the presence of bounded exogenous disturbances.
The new adaptation law seems simpler than earlier methods found in the literature. The restriction of assuming only smooth disturbances in previous works [3, 4, 22] can be overcome. In addition, the new adaptive scheme does not require knowledge of the minimum and maximum allowed values of the adaptive gain [22], and do not require any information about the bound on the disturbances [3]. When compared with the adaptive methodologies applied to [2, 5, 18], no mechanism is necessary to detect the sliding mode and adapt the control gain in order to make it increase or decrease. Additionally, perfect stabilization and ideal sliding mode can be guaranteed rather than only the convergence to a neighborhood of the origin and intermittent loss of the sliding motion.
2 Discontinuous Differential Equations
Since we shall deal with discontinuous systems, it is necessary to define precisely the meaning of a solution for such systems. Here, Filippov’s definition is assumed [6]. Note that the control signal u is not necessarily a function of t in the usual sense when sliding modes take place. In order to avoid clutter, we will denote by u(t) the locally integrable functions which are equivalent to u, in the sense of equivalent control [21], along any given Filippov solution z(t) of the closed-loop system. It should be stressed that z(t) is, by definition, absolutely continuous. This definition is motivated by the adequate representation of the behavior of physical systems when the actual switching mechanism tends to an ideal switching device which corresponds to the given discontinuous differential equation [21]. Then, along any such solution, u can be replaced by u(t) in the right-hand side of the governing differential equations. Although the equivalent control \(u(t)=u_\mathrm{{eq}}(t)\) is not directly available, for affine systems filtering u with any causal linear time-invariant filter with impulse response g(t) gives \(g(t)*u=g(t)*u(t)=g(t)*u_\mathrm{{eq}}(t)\). Here, the symbol “\(*\)” stands for the convolution operator defined as:
2.1 Extended Equivalent Control
The extended equivalent control [8, 9] is defined as an equivalent control which applies for a complete system motion, i.e., on and outside the sliding mode surface \(\sigma (x(t),t)=0\), \(\sigma :{\mathbb {R}}^n\times {\mathbb {R}}_+\rightarrow {\mathbb {R}}^m\). Consider the class of nonlinear systems described by
where \(f:{\mathbb {R}}^n\times {\mathbb {R}}_+\rightarrow {\mathbb {R}}^n\) and \(B:{\mathbb {R}}^n\times {\mathbb {R}}_+\rightarrow {\mathbb {R}}^{n\times m}\) are smooth. Let x(t) be a solution of this system, for \(t\in [0,T)\). Then, the extended equivalent control is a locally integrable function, defined almost everywhere in the interval [0, T), and is given by
where \(G=\frac{\partial }{\partial x}\sigma (x(t),t)\). The above expression is well defined since the solution x(t) is absolutely continuous by definition and, thus, has derivatives almost everywhere.
2.2 Average Control
The ideal equivalent control signal is not available for controller realization. Since the extended equivalent control \(u_\mathrm{{eq}}(t)\) in systems affine in control (such as (6.2)) coincides with the slow component of the actual sliding mode control u, the average control denoted by \(u_\mathrm{{av}}(t)\) can be estimated by applying the real control signal to a low-pass filter with unit DC gain and time constant \(\tau >0\) small enough as compared with the slow component, but yet large enough to attenuate the high-frequency switching in u [21]. Thus, the low-pass filter
gives the average control which is an estimate of \(u_\mathrm{{eq}}(t)\) satisfying [22]
as \(\tau \rightarrow +0\), provided that \(u_\mathrm{{eq}}(t)\) is a continuous signal.
3 Motivating Example
In order to illustrate the proposed approach, consider the simplest scalar integrator example inspired by [22]:
subject to an input disturbance d(t), which is piece-wise continuous and uniformly bounded by an unknown constant \(\bar{d}>0\) such that \(|d(t)|\le \bar{d}\), \(\forall t>0\). Differently from [22], no known constant upper bound is imposed on \(|\dot{d}(t)|\).
Our objective is to apply the first-order sliding mode controller
into the system (6.6) and design the modulation function \(\rho (t)>0\) in an adaptive fashion so that the state x can be driven to zero.
Basically, the modulation function \(\rho \) must satisfy the differential equation:
with constants satisfying the inequalities
The signal \(u_\mathrm{{eq}}(t)\) is the extended equivalent control [9], which is assumed available to simplify this presentation.
The idea is very intuitive: outside of the sliding motion \(|u_\mathrm{{eq}}(t)|=\rho (t)\), almost everywhere, whereas during the sliding motion \(|u_\mathrm{{eq}}(t)|=|d(t)|\). Thus, during the reaching phase, the differential equation (6.8) can be rewritten as
Since \(c_f-\gamma _f>0\), \(\rho \) increases exponentially in order to dominate the disturbance \((\rho (t)\!\ge \!\bar{d})\) in some finite time, such that the sliding surface \(x\!\equiv \!0\) is reached.
Once the sliding mode is achieved, the adaptation is given by the input-to-state stable (ISS, see Appendix) filter (6.8) with input being the estimate of |d(t)| given by the equivalent control, that is \(|u_\mathrm{{eq}}(t)|=|d(t)|\). The modulation signal is the solution of (6.8) given by
If
for some \(t_0\ge 0\), then it can be concluded from (6.11) and \(\rho (0)>0\) that \(\rho (t)>|d(t)|\), which is a sufficient condition for the existence of sliding modes. Inequality (6.12) means that the output signal of a first order low-pass filter with transfer function \(c_f/(s+\gamma _f)\) dominates its input signal |d(t)|.
In the proposed adaptation law, if the amplitude of the disturbance d(t) decreases, then \(\rho (t)\) will eventually decrease due to the forgetting factor \(-\gamma _f \rho \) in the adaptation law (6.8). This is an advantage over earlier adaptive schemes [14, 17, 23] based on non decreasing gains.
4 Problem Formulation
4.1 Nonlinear Plant
Consider a nonlinear system in the normal form [11]:
where \(\eta \in {\mathbb {R}}^{n-r}\), \(\xi =[\xi _1\,,\dots \,,\xi _r]^T\in {\mathbb {R}}^r\) and \(x=[\eta ^T, ~\xi ^T]^T\in {\mathbb {R}}^n\) is the state, \(u \in {\mathbb {R}}\) is the control signal, \(f(x,t)\!\in \!{\mathbb {R}}\) is a state dependent nonlinear term, \(d(t)\!\in \!{\mathbb {R}}\) is an exogenous input disturbance, \(g(x,t)>\underline{g}\) (\(\forall x\in {\mathbb {R}}^n\), \(\forall t\in {\mathbb {R}}_+\)) is the input gain, and \(\underline{g}>0\) is a constant lower bound. In order to satisfy the minimum-phase condition, the nonlinear subsystem (6.13) with partial state \(\eta \) and input signal \(\xi \) is assumed to be ISS (see Appendix).
4.2 Allowable Disturbance Signals
The fundamental assumption for the unknown input disturbance d(t) is stated below:
- (A1) :
-
The input disturbance d(t) is assumed to be unknown, locally integrable and norm bounded by \(|d(t)| \le \bar{d}\), \(\forall t\), where \(\bar{d} \ge 0\) is an unknown scalar. Moreover, there exist a finite time \(t_0\ge 0\) and known constants \(c_f>\gamma _f>0\) such that
$$\begin{aligned} |d(t)| \le c_f e^{-\gamma _f t}*\left| d(t)\right| \,, {\quad \forall t\ge t_0\,.} \end{aligned}$$(6.17)
Note that (A1) relaxes the knowledge of upper bounds for disturbances usually assumed in standard sliding mode control designs. In addition, it allows for some classes of piece-wise continuous disturbance signals. Inequality (6.17) does not impose extra conditions on the disturbance time derivatives either, as the boundedness of \(\dot{d}(t)\) assumed in [4, 22].
It seems not easy to fully characterize the classes of disturbance signals, their waveforms and relationship with the constants \(c_f\) and \(\gamma _f\), such that assumption (A1) can be verified. Some examples of disturbances are presented in the simulation tests of Sect. 6.8. In order to illustrate a class of disturbance signals that verify inequality (6.17), assume that the time derivative \(\frac{\mathrm{d}|d(t)|}{\mathrm{d}t}\) exists almost everywhere. If at a given instant \(t_1\ge t_0\) the modulation signal verifies \(\rho (t_1)>|d(t_1)|\) and the sliding mode exists, then \(|u_\mathrm{{eq}}(t_1)|=|d(t_1)|\). A sufficient condition to maintain \(\rho (t_1+\varepsilon )>|d(t_1+\varepsilon )|\) (\(\varepsilon \rightarrow 0+\)) is \(\dot{\rho }(t)\ge \frac{\mathrm{d}|d(t)|}{\mathrm{d}t}\) when \(t=t_1\), thus, from (6.8), one has
Since \(\rho (t_1)\ge |d(t_1)|=|u_\mathrm{{eq}}(t_1)|\), the previous inequality is implied by
when \(t=t_1\). Therefore, the following inequality can be obtained:
From this inequality, we can conclude that some classes of non smooth and even unbounded exponentially growing disturbances satisfying
\(d_0>0\), could be considered, provided that the coefficients in (6.9) are properly chosen. Piecewise-continuous disturbances d(t) with continuous |d(t)| and \(\frac{\mathrm{d}|d(t)|}{\mathrm{d}t}\) defined almost everywhere may belong to this class, e.g., square wave and sawtooth.
5 Adaptive Sliding Mode Control
First, define the relative degree one sliding variable:
where S is chosen such that the polynomial \(s_{r-1}\lambda ^{r-1}+\dots +s_1\lambda +s_0\) is Hurwitz. Without loss of generality, we will fix \(s_{r-1}=1\) to obtain a monic polynomial.
By computing \(\dot{\sigma }\), one has
with \(f_\sigma (x,t)=\sum _{i=0}^{r-2} s_i \xi _{i+2}+f(x,t)\).
Let us consider the control law:
If the modulation function is designed such that \(\rho (t)>|d(t)|+\delta _d\) (\(\forall t\ge t_1\ge 0\), \(\delta _d>0\)), so that it can be concluded that \(\sigma \dot{\sigma }\le -\delta _\sigma |\sigma |<0\) for some constant \(\delta _\sigma >0\), the sliding surface \(\sigma =0\) will be reached in finite time. Since the polynomial \(\lambda ^{r-1}+\dots +s_1\lambda +s_0\) is Hurwitz, then the reduced order equation which governs the closed-loop system during the sliding motion is exponentially stable and, consequently, the state \(\xi \) will converge exponentially to the origin. Due to the ISS condition imposed on the internal dynamics (6.13), we can also conclude that \(\eta \rightarrow 0\) as \(\xi \rightarrow 0\) and guarantee global stabilization.
On the other hand, if no upper bound for the input disturbance is known as assumed in (A1), we apply the following adaptive modulation function described by
where \(u_\mathrm{{seq}}(t)\) is the extended equivalent control of \(u_\mathrm{{s}}\), and \(\delta >0\) is a constant which guarantees a desired minimum control level for start-up.
As discussed before, the condition \(c_f>\gamma _f>0\) is used in (6.27) to guarantee the control loop is unstable and exponentially growing before the sliding mode takes place, so that it can be indeed attained. The convolution inequality in (A1) is a sufficient condition for the sliding mode existence, that is, it guarantees the modulation function (6.27) to become an upper bound for |d(t)| after the sliding mode takes place.

Block diagram of the proposed adaptive sliding mode controller
Figure 6.1 describes the proposed adaptive sliding mode controller. Since the extended equivalent control signal \(u_\mathrm{{seq}}(t)\) is unavailable, it is approximated by the average control signal \(u_\mathrm{{av}}(t)\) given by the low-pass filter
for the purpose of implementation of the adaptive law (6.27).
6 Stability Analysis
The main stability results of the proposed adaptive sliding mode controller are summarized in the following theorem assuming the availability of the extended equivalent control signal \(u_\mathrm{{seq}}(t)\) needed in the adaptive modulation function (6.27).
Theorem 6.1
Consider the nonlinear system (6.13)–(6.16) presented in Sect. 6.4.1, where the unknown matched disturbance d(t) satisfies Assumption (A1). The state-feedback based sliding mode control law u is given by (6.24)–(6.26), with adaptive modulation function \(\rho \) (6.27) and sliding variable \(\sigma \) in (6.22). Under these conditions, the sliding surface \(\sigma =0\) is reached in finite time and the closed-loop system is uniformly globally exponentially stable in the sense that the state \(x=[\eta ^T,~\xi ^T]^T\) converges exponentially to the origin and all remaining signals are uniformly bounded.
Proof
The term \(u_\mathrm{{c}}\) given by (6.25) in the control law (6.24) cancels out the harmful nonlinearities in the system (6.16) and eliminates any possibility of finite-time escape of the state trajectories. Thus, the system signals will be regular and can grow at most exponentially [20]. This fact leads us to the second step of the proof.
The modulation signal \(\rho (t)\) verifies the differential equation (6.27). Assuming no initial sliding mode, \(u_\mathrm{{seq}}(t)=u_\mathrm{{s}}(t)\). Thus, \(|u_\mathrm{{seq}}(t)|=\rho (t)\) and the solution of (6.27) is given by
grows exponentially because \(c_f-\gamma _f>0\). Since assumption (A1) holds, there exists a finite-time instant \(T_1>0\) such that \(\rho (t) \ge |d(t)|\) is satisfied \(\forall t > T_1\). Then, from [10, Lemma 1], the ideal sliding mode \(\sigma (t)\equiv 0\) is achieved in finite time.
The signal \(\sigma \) is a relative degree one output for (6.13)–(6.16). Therefore, it is possible to apply an invertible transformation and rewrite it into a particular relative degree one regular form [21] such that all the state variables of the transformed nonlinear system are exponentially ISS with respect to \(\sigma \). Thus, \(x=[\eta ^T, ~\xi ^T]^T\) tends exponentially to zero since the sliding mode on the manifold \(\sigma =0\) is reached and the polynomial \(\lambda ^{r-1}+\dots +s_1\lambda +s_0\) is Hurwitz.
Finally, from the ISS nature of the adaptive law (6.27), it can be concluded that the modulation signal \(\rho (t)\) is also uniformly bounded since in finite time \(u_\mathrm{{seq}}(t)=d(t)\), and d(t) is uniformly bounded. \(\square \)
7 Extensions of the Proposed Adaptive Law
In this section, some extensions of the proposed adaptive law are discussed.
7.1 Global Differentiation and Output-Feedback
The generalization of the tools introduced here to the output-feedback framework are still possible if we apply the global higher-order sliding mode (HOSM) differentiator with dynamic gains recently developed in [16]. As usual, the idea is to define the output signal \(y=\xi _1\) of relative degree r and replace its upper derivatives \(\xi _2=\dot{y}\,, \ \xi _3= \ddot{y}\,, \ldots \,, \ \xi _r=y^{(r-1)}\) by their estimates \(\hat{\xi }_2\,, \hat{\xi }_3\,, \ldots \,, \hat{\xi }_r\) obtained with the exact differentiator [12]. The stability analysis is straightforward since the finite-time convergence of the differentiator with dynamic gains is demonstrated and the separation principle is fulfilled independently [13].
7.2 Non Input-to-State-Stable Zero Dynamics
Consider \(r=1\) and \(\xi \!=\!\xi _1\) in (6.13)–(6.16), and assume the internal dynamics \(\dot{\eta }=f_0(\eta ,\xi ,t)\) is linear and time invariant such that it could be written as \(\dot{\eta }\!=\! A_0 \eta \!+\! B_0\xi \). Then, the proposed approach can be extended to systems with non ISS zero dynamics (\(A_0\) non-Hurwitz) [1] by redefining the sliding variable \(\sigma \!=\!\xi \!-\!K\eta \), as in [7]. Assuming the pair \((A_0\,, B_0)\) is controllable, when the state variables are restricted to the manifold \(\sigma =0\), the reduced-order model becomes \(\dot{\eta }=(A_0+B_0K)\eta \), which is exponentially stable for an appropriate feedback matrix \(K^T\in {\mathbb {R}}^{n-1}\). Once \(\eta \rightarrow 0\), the convergence of \(\xi \) to zero would also be proved. The only change needed in the control design is the modification of the term \(f_\sigma (x,t)\) which appears in (6.23) and (6.24) to
7.3 Adaptive Twisting Algorithm
The first and simplest second order sliding mode (SOSM) algorithm is the so-called “twisting algorithm (TA)” [14]. For (6.13)–(6.16) with \(r=2\), our adaptive version of the TA would be given by:
where \(a(t)=\rho (t)\) in (6.27) is defined analogously to satisfy \(\rho (t)\ge |d(t)|\). The proposed adaptive twisting algorithm would ensure the finite-time exact convergence of both \(\xi _1\) and \(\xi _2\), i.e., there exists \(T>0\) such that \(\xi _1(t)=\xi _2(t)=0\), \(\forall t>T\).
8 Simulation Results
We seize the opportunity to consider the integrator example (6.6) already studied in Sect. 6.3 to focus the features of the proposed adaptation scheme and present some numerical results.
In the following simulations, the controller parameters applied to (6.24)–(6.28) and (6.22) were: \(f_\sigma (x,t)=0\), \(g(x,t)=1\), \(S=1\), \(\delta =0.2\), \(c_f=1.7\), \(\gamma _f=0.8\) rad/s and \(\tau =0.01\) s. Notice that \(c_f>\gamma _f>0\), such that inequality (6.9) is verified.
Distinct profiles for the disturbance signal d(t) were evaluated, including smooth and non smooth disturbances.
8.1 Smooth Disturbances
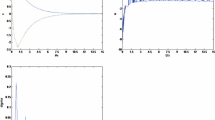
Figure 6.2 presents simulation results obtained for a sinusoidal disturbance \(d(t)=5\sin (4t)\). It can be seen that after an initial exponential growth of the modulation signal \(\rho (t)\), it becomes larger than the absolute value of the sinusoidal disturbance (|d(t)|), then the sliding mode takes place when \(\sigma \equiv 0\). Thereafter, the amplitude of the switching control signal u is maintained larger than the amplitude of the disturbance.

Performance of the proposed adaptation scheme under sinusoidal disturbance: sliding variable \(\sigma \), control signal u (gray), average control \(u_\mathrm{{av}}\) (black), modulation signal \(\rho \) (gray) and absolute value of the disturbance |d| (black)
Figure 6.3 presents simulation results obtained for an exponentially decaying sinusoidal disturbance. The sliding mode takes place (\(\sigma \equiv 0\)) after the modulation signal \(\rho (t)\) becomes larger than the absolute value of the disturbance (|d(t)|). It can be seen that the proposed adaptation scheme reduces the modulation signal amplitude as the disturbance vanishes exponentially.

Performance of the proposed adaptation scheme under an exponentially decaying sinusoidal disturbance: sliding variable \(\sigma \), control signal u (gray), average control \(u_\mathrm{{av}}\) (black), modulation signal \(\rho \) (gray) and absolute value of the disturbance |d| (black)
8.2 Non Smooth Disturbances
Figures 6.4, 6.5 and 6.6 present simulation results obtained for discontinuous periodic disturbances of rectangular shape, peak value 2, always positive, frequency 2 Hz, and different duty cycles.
In Fig. 6.4 the duty cycle is 50%, such that the disturbance verifies assumption (A1). It can be seen that after an initial exponential growth of the modulation signal \(\rho (t)\), it becomes larger than the disturbance d(t), which allows the sliding mode in the manifold \(\sigma =0\). Therefore, the amplitude of the switching control signal u is maintained larger than the peak of the pulsed disturbance.

Performance of the proposed adaptation scheme under rectangular pulsed disturbances with 50% duty cycle: sliding variable \(\sigma \), control signal u (gray), average control \(u_\mathrm{{av}}\) (black), modulation signal \(\rho \) (gray) and disturbance d (black)

Performance of the proposed adaptation scheme under rectangular pulsed disturbances with 80% duty cycle: sliding variable \(\sigma \), control signal u (gray), average control \(u_\mathrm{{av}}\) (black), modulation signal \(\rho \) (gray) and disturbance d (black)
In Fig. 6.5 the duty cycle is 80%, such that its mean value is greater than in the previous case. Thus, the amplitude of the modulation signal \(\rho (t)\) becomes much larger than the disturbance d(t).
In Fig. 6.6 the duty cycle is 20%. In this case, the disturbance does not verify assumption (A1), which impairs the effectiveness of the adaptation scheme and the sliding mode cannot be guaranteed. This causes the repetitive pulses in the sliding variable \(\sigma \).

Performance of the proposed adaptation scheme under rectangular pulsed disturbances with 20% duty cycle: sliding variable \(\sigma \), control signal u (gray), average control \(u_\mathrm{{av}}\) (black), modulation signal \(\rho \) (gray) and disturbance d (black)
9 Conclusion
A new adaptive sliding mode controller to circumvent (non) smooth input exogenous disturbances with unknown constant bounds has been addressed. The cases of state dependent disturbances and uncertain parameters are left for future research.
The proposed controller is based on the extended equivalent control concept. The modulation function (control gain) is designed to dominate the disturbances. It decreases with the disturbance and, consequently, the precision of the stabilization is improved, while preserving in theory the sliding mode occurrence. In practice, if the gains decrease, the sensitivity of the overall closed-loop system is also reduced.
The main steps of the proof for uniform and global exponential stability as well as perfect disturbance rejection were carried out assuming the availability of the equivalent control. The effects of the averaging filter needed to estimate the equivalent control signal is a current research topic.
Although only the stabilization under full-state feedback and no parametric uncertainties are being considered to keep the focus on disturbances with unknown bounds, the developed method can be extended to more general uncertain systems where trajectory tracking via output-feedback is also pursued. We will leave these generalizations for future works. The generalization of the proposed tools for fixed-time algorithms [19] or HOSM based controllers and their combination with other non-overestimated adaptive strategies also seem to be interesting topics for future investigation.
References
Baev, S., Shtessel, Y., Shkolnikov, I.: Nonminimum-phase output tracking in causal systems using higher-order sliding modes. Int. J. Robust Nonlinear Control. 18(4–5), 454–467 (2008)
Bartolini, G., Levant, A., Plestan, F., Taleb, M., Punta, E.: Adaptation of sliding modes. IMA J. Math. Control. Inf. 30(3), 285–300 (2013)
Bartoszewicz, A.: A new technique to compensate for disturbance in sliding mode control systems. In: Proccedings of 24th Conference IEEE Indutrial Electronics Society, pp. 1708–1711 (1998)
Edwards, C., Shtessel, Y.B.: Adaptive continuous higher order sliding mode control. Automatica 65, 183–190 (2016)
Estrada, A., Plestan, F., Allouche, B.: An adaptive version of a second order sliding mode output feedback controller. In: Proccedings of European Control Conference, pp. 3228–3233 (2013)
Filippov, A.F.: Differential Equations with Discontinuous Righthand Sides. Kluwer Academic Publishers, Dordrecht (1988)
Gonzalez, T., Moreno, J.A., Fridman, L.: Variable gain super-twisting sliding mode control. IEEE Trans. Autom. Control. 57(8), 2100–2105 (2012)
Hsu, L., Costa, R.R.: Adaptive control with sliding modes: theory and applications. In: Minicourse Proceedings XI Congresso Brasileiro de Automática, pp. 39–60 (1996)
Hsu, L., Cunha, J.P.V.S., Costa, R.R., Lizarralde, F.: Multivariable output-feedback sliding mode control. In: Yu, X., Xu, J.X. (eds.) Variable Structure Systems: Towards the 21st Century, pp. 283–313. Springer, Berlin (2002)
Hsu, L., Lizarralde, F., Araújo, A.D.: New results on output-feedback variable structure model-reference adaptive control: design and stability analysis. IEEE Trans. Autom. Control. 42(3), 386–393 (1997)
Khalil, H.K.: Nonlinear Systems, 3rd edn. Prentice-Hall, Upper Saddle River (2002)
Levant, A.: Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control. 76(9), 924–941 (2003)
Levant, A., Livne, M.: Exact differentiation of signals with unbounded higher derivatives. IEEE Trans. Autom. Control. 57(4), 1076–1080 (2012)
Moreno, J.A., Negrete, D.Y., Torres-González, V., Fridman, L.: Adaptive continuous twisting algorithm. Int. J. Control. 89(9), 1798–1806 (2016)
Oliveira, T.R., Cunha, J.P.V.S., Hsu, L.: Adaptive sliding mode control for disturbances with unknown bounds. In: Proccedings of 14\(^{th}\) International Workshop on Variable Structure Systems, pp. 59–64 (2016)
Oliveira, T.R., Estrada, A., Fridman, L.M.: Global exact differentiator based on higher-order sliding modes and dynamic gains for globally stable output-feedback control. In: Proccedings of IEEE Conference on Decision and Control, pp. 4109–4114 (2015)
Oliveira, T.R., Leite, A.C., Peixoto, A.J., Hsu, L.: Overcoming limitations of uncalibrated robotics visual servoing by means of sliding mode control and switching monitoring scheme. Asian J. Control. 16(3), 752–764 (2014)
Plestan, F., Shtessel, Y., Brégeault, V., Poznyak, A.: New methodologies for adaptive sliding mode control. Int. J. Control. 83(9), 1907–1919 (2010)
Polyakov, A., Efimov, D., Perruquetti, W.: Finite-time and fixed-time stabilization: implicit Lyapunov function approach. Automatica 51, 332–340 (2015)
Sastry, S., Bodson, M.: Adaptive Control: Stability, Convergence and Robustness. Prentice-Hall, Englewood Cliffs (1989)
Utkin, V.I.: Sliding Modes in Control and Optimization. Springer, Berlin (1992)
Utkin, V.I., Poznyak, A.S.: Adaptive sliding mode control with application to super-twist algorithm: equivalent control method. Automatica 49(1), 39–47 (2013)
Yan, L., Hsu, L., Xiuxia, S.: A variable structure MRAC with expected transient and steady-state performance. Automatica 42(5), 805–813 (2006)
Acknowledgements
The authors thank the Brazilian funding agencies CAPES, CNPq and FAPERJ for the financial support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
To define the concept of input-to-state stability/stable (ISS) [11, Sect. 4.9], consider the system
where \(f:{\mathbb {R}}^n\times {\mathbb {R}}^m\times {\mathbb {R}}_+\rightarrow {\mathbb {R}}^n\) is piecewise continuous in t and locally Lipschitz in x and u. The input signal u(t) is piecewise continuous and uniformly bounded. Assume that this system has a globally uniformly asymptotically stable equilibrium point at \(x=0\) when \(u(t)\equiv 0\).
Definition 6.1
The system (6.32) is said to be input-to-state stable (ISS) if there exist a class \({\mathscr {KL}}\) function \(\beta \) and a class \({\mathscr {K}}\) function \(\gamma \) such that for any initial state \(x(t_0)\) and any bounded input signal u(t), the solution x(t) exists \(\forall t\ge t_0\ge 0\) and satisfies
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter
Cite this chapter
Oliveira, T.R., Cunha, J.P.V.S., Hsu, L. (2018). Adaptive Sliding Mode Control Based on the Extended Equivalent Control Concept for Disturbances with Unknown Bounds. In: Li, S., Yu, X., Fridman, L., Man, Z., Wang, X. (eds) Advances in Variable Structure Systems and Sliding Mode Control—Theory and Applications. Studies in Systems, Decision and Control, vol 115. Springer, Cham. https://doi.org/10.1007/978-3-319-62896-7_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-62896-7_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-62895-0
Online ISBN: 978-3-319-62896-7
eBook Packages: EngineeringEngineering (R0)