
Abstract
One of the very serious problems facing a MANET (Mobile Ad hoc Network) is very limited life of its mobile nodes. Most MANET routing protocols use hop count as the cost metric, so the nodes along shortest paths may be used more often and exhaust their batteries faster, these protocols do not consider the energy problem because there is no exchange of information on the state of mobile nodes between the MAC protocol (Medium Access Control) and the routing protocols in order to support the power saving mechanisms. In this paper we propose the improvements of one of the most important routing protocols that is AODV (Ad hoc On demand Distance Vector). These improvements take into account a metric based on energy consumption during route discovery, thereby increasing the network lifetime, packet delivery ratio and decreasing load of control packets. Most researches in this domain are based on an ideal radio channel, in which a successful transmission is guaranteed if the distance between nodes is less than a certain threshold. However, wireless communication links normally suffer from the characteristics of realistic physical layer. So in order to give credibility to our work we use a realistic physical layer by modeling transmission errors by the Gilbert-Elliot model.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Mobile Ad-hoc Network
- Routing protocols
- AODV
- Energy consumption
- NS2(Simulator)
- Radio channel
- Control overhead
- Quality of Service (QoS)
- Markov chain
- Gilbert-Elliot model
1 Introduction
Ad-hoc network is a collection of mobile nodes forming a network topology, operating without alternative base station and without centralized administration. For MANET the most important is probably to establish optimization criteria for energy conservation because the energy depletion of a node does not only affect its ability to communicate but could actually cause network partitioning. MANET routing protocols use in general the same metric (number of hops) so the choice of a route can deplete some nodes because they do not take into consideration the energy consumption in the choice of route. Our work is a part of the study of the routing problem in mobile ad hoc networks in which we propose an improvement of AODV [1] protocol using a metric based on the energy in order to prolong the nodes lifetime and thus the network lifetime. Our proposition will be implemented and simulated in NS2 [2] to show the impact on QoS including the consumption of energy in the network.
The rest of this paper is organized as follows: Sect. 2 gives a brief description of the AODV protocol. Section 3 presents a discussion on the related works in this area, Sect. 4 the details working of the proposed E-AODV, Sect. 5 shows the simulation environment, Experimental Results and Discussions. Conclusion and future work are given in Sect. 6.
2 AODV Protocol
AODV is essentially an improved proactive DSDV [3] algorithm. It is an on demand algorithm, meaning that it builds routes between nodes only as desired by source nodes. The AODV protocol reduces the number of broadcasts of messages. A node broadcasts a route request (RREQ) if it would need to know a route to a destination and that this route is not available. It can happen in one of three cases: if the destination is not known beforehand, it became defective or if the existing path to the destination has expired its lifetime. After the broadcast of RREQ, the source waits for the route reply packet (RREP) if it is not received after some time (called RREP_WAIT_TIME), the source can resume the process of looking for destination by a new request RREQ. A node receiving the RREQ may send a route reply (RREP) if it is either the destination or if it has a matching route in its routing table. In this last case the RREQ is not forwarded but a RREP is sent to make the discovery more efficient less delay and less overhead. To maintain consistent route, periodic transmission of the message “HELLO” (which is a RREP with TTL (Time To Live) 1) is performed. If three messages “HELLO” are not consecutively received from a neighboring node, the link in question is considered failed. The process of execution the RREQ, RREP and HELLO message of AODV protocol is presented in Fig. 1.

The process of execution the RREQ, RREP and HELLO messages of AODV protocol
When choosing a route, AODV routing protocol only considers the path that is the shortest without considering the energy of the nodes. So when AODV routing protocol chooses the routes, it is very necessary to consider the residual energy of nodes, so it is necessary to improve this protocol to solve the problem of energy consumption in MANET routing nodes.
3 Related Works
This section delivers some of the many energy efficient schemes based on AODV developed by researchers in the field, in [4] the authors propose an improvement for the AODV protocol to maximize the networks lifetime by applying an Energy Mean Value algorithm which considerate node energy-aware.
In [5] a mechanism involving the integration of load balancing approach and transmission power control approach is introduced to maximize the lifetime of MANETs. The load balancing approach on-demand protocols select a route at any time based on the minimum energy availability of the routes and the energy consumption per packet of the route at that time. As per the transmission power control approach once a route is selected, transmission power will be controlled on a link by link basis to reduce the power consumption per node. In [6] the authors propose a multipath minimum energy routing mechanism to minimize the overall energy consumption of the network. They model an ad hoc network by a set of nodes and links. Each link is associated with an energy cost function which is a function of the total traffic flowing over this link. They focus on the problem of how to split traffic among multiple paths to minimize the sum of the links’ energy cost.
In [7] the authors propose an EE-AODV routing protocol which is an enhancement in the existing AODV routing protocol. The routing algorithm which is adopted by Energy Efficient Ad Hoc Distance Vector protocol (EE-AODV) has enhanced the RREQ and RREP handling process to save the energy in mobile devices. EE-AODV considers some levels of energy as the minimum energy which should be available in the node to be used as an intermediary node (or hop). When the energy of a node reaches to or below that level the node should not be considered as an intermediary node, until and unless no alternative path is available. Manickam et al. [8] suggested a new protocol AODV Energy Based Routing (AODV-EBR) protocol for energy constrained mobile ad hoc Networks. This protocol optimizes Ad hoc on demand distance vector routing protocol (AODV) by creating a new route for routing the data packets in the active communication of the network. The proposed protocol efficiently manages the energy weakness node and delivers the packets to destination with minimum number of packets dropped. This protocol has two phases such as Route discovery and Route maintenance. The operation of AODV-EBR is similar to AODV considering the energy of a node during the establishment of route.
El Fergougui et al. [9] implemented a new approach AODV-ROE (AODV Reduction Overhead and Energy), whose routing metric is based on the consumption of energy to reduce the number of control messages needed to discover and maintain a route. This new protocol has the main objective to ensure that network connectivity is maintained as long as possible, and that the energy level of the entire network is similar. They have grouped these two goals in the deployment of several scenarios ad-hoc. So their goal is to reduce as possible the energy problem and minimizing the overload in the network.
4 Proposed Work: Algorithm for Energy Efficient AODV
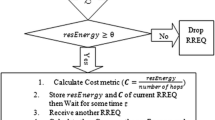
In order to implement residual energy in AODV protocol, two new vectors, called Residual Energy vector (RE) and node label vector (LB) are added to the RREQ and RREP messages. To find a route to a destination node, a source node floods a RREQ packet over the network. When neighbors nodes receive the RREQ packet, they update the RE and LB by adding their residual energy, their index and it triggers the data collection timer in order to receive all RREQ messages forwarded through other routes, after this process each node has a complete database of energy of all links connecting the nodes which are inserted in the LB vector, when time expires each node finds the shortest paths between it and all other nodes in LB vector using Dijkstra algorithm and rebroadcast the packet to the next nodes until the packet arrives at a destination node.
NB: we fix the threshold value (Th) for the nodes on the network when the energy (Ei) of the node is less than the threshold value (Th) that node does not forward the RREQ, but drops it.
4.1 Graph Construction
The graph G(V, E) is represented by an N × N (N is the number of nodes in LB vector) the weights of the edges are calculated by:
-
where:
-
ENi is the current remaining energy of the node i
-
ENj is the current remaining energy of the node j
-
H: The number of hops from the current node to the node that transmits the request.
Figure 2 shows the processes of constructing the weighted graph during a broadcasting RREQ packet from the source node (s) to the destination node (d).

Processes of constructing the weighted graph
4.2 Running Dijkstra Algorithm
Using the Dijkstra algorithm, the nodes can determine the shortest distance between them and any other node in LB vector. The idea of the algorithm is to continuously calculate the shortest distance beginning from a starting point, and to exclude longer distances when making an update. So here is the pseudo code of function for this algorithm:

4.3 Media Transmission Error
We consider the 2-state Markov approach as introduced by Gilbert and Elliott [10, 11], which is widely used for describing error patterns in transmission channels. This model is shown below in Fig. 3, where at time k, \( {\text{z}}_{\text{k}} = 1 \) represents the bad state and \( {\text{z}}_{\text{k}} = 0 \) represents the good state. The probability of moving from state \( {\text{z}}_{\text{k}} = {\text{i}} \) to \( {\text{z}}_{\text{k + 1}} \,{ = }\,{\text{j}} \) is denoted by pig.

Gilbert-Elliot model
Let \( {\text{t}}_{\text{g}} \) and \( {\text{t}}_{\text{b}} \) the mean duration in good state and in bad state, respectively.
The steady state probability for being in good state can be obtained as follows:
In same way, the steady state probability for being in bad state can be obtained as follows:
The probability of a transition occurs from good to bad state is computed as:
The probability of a transition occurs from bad to good state is computed as:
The parameters p and q can be derived from experimental observations measurements of errors on the wireless link, given in [12], show \( {\text{p}}_{{{\text{b}}/{\text{g}}}} = 0. 3 8 20 \) and \( {\text{p}}_{{{\text{g}}/{\text{b}}}} = 0.00 60. \)
5 Simulation and Results
5.1 Simulation Environment
We have created several scenarios to evaluate E-AODV protocol. The topology of simulation varies with the number of nodes (35, 40, 45, 50, 55, 60) which are placed uniformly and forming a Mobile Ad-hoc Network with nodes over a 1000 × 1000 m area for 600 s of simulated time in NS2. Using this simulator (NS2) the complex scenarios can be easily tested and results can be quickly obtained. For network traffic we create a CBR connection pattern between nodes, having random of connections, with a seed value of 1.0 and a rate of 5.0 pkts/s. The Table 1 show the parameters used in the simulation:
5.2 Performance Metric
We use four different quantitative metrics to compare the performance of the original AODV and the improvement AODV(E-AODV):
-
Normalized Routing Load: This is the number of routing packets per data packets delivered at the destination.
-
Packet delivery ratio: The ratio of the data packets delivered to the destinations to those generated by the CBR sources.
-
Total Energy Consumption: This metric gives the energy consumption in the network at the end of simulation.
-
Number of Alive Nodes (AN): This efficiency metric gives the number of nodes have a non-zero energy at the end of the simulation.
5.3 Results
For each performance metric two experiments were carried out. In the first experiment, the impact of network density on the performance of AODV and E-AODV was tested by varying the number of nodes. In the second experiment, the effect of the pause times on the performance of the protocol was studied.
-
Normalized Routing Load.
Figures 4 and 5 show the simulation results of Normalized Routing Load of E-AODV and AODV in the different number of nodes and different Pause time. We can observe that E-AODV demonstrates significantly lower routing load than AODV due to the nodes of the more residual energy are selected on the route in E-AODV, so the route will not quickly come into force, thus it reduces the number of routing discovery.

Comparison of normalized routing load with number of nodes

Comparison of normalized routing load with pause time
We can also see that the value of Normalized Routing Load is increasing when we raise the number of nodes because adding nodes will automatically increase the number of periodic messages (HELLO messages) and the broadcast messages like RREQ. Less pause time indicate high mobility scenario which leads to frequent link failures and more pause time indicates less mobility scenario, so the number of route discoveries is directly proportional to the number of link failures.
-
Packet Delivery Ratio.
When looking at the packet delivery ratio in Fig. 6 and 7, it can be seen that E-AODV perform much better than AODV. The reason is that the nodes of the less residual energy can be selected on the route in AODV so if these packets are sent, and the route chosen is not satisfying the requirements energy, packets have more probability to be dropped at the intermediate nodes. In other words, the E-AODV decreases the probability for dropping packets by selecting the paths which have more energy. It helps to save the data rate as well.

Comparison of packet delivery ratio with number of nodes

Comparison of packet delivery ratio with pause time
From the Fig. 7 it is observed that as the pause time increases the PDR increases too. The reason for this is, since the network is static there is more probability of the source and destination nodes staying in transmission range of each other, the source node doesn’t need the intermediate nodes to transfer the data packets, so the probability for dropping packets decreases.
-
Total Energy Consumed.
The consumed energy for E-AODV is lesser than AODV is clearly illustrated in Figs. 8 and 9 due to AODV considers the hop count as the metric for choosing the best route, while our protocol considers a metric based on residual energy in the best route selection. When we only consider the hop count in route selection, a lot of data packets will share the same path simultaneously and will result in a quick diminution of the battery power of the nodes along this path.

Comparison of total energy consumed with number of nodes

Comparison of total energy consumed with pause time
-
Number of Alive Nodes.
Figures 10 and 11 show the comparison between the number of nodes have a non-zero energy after the end of the simulation versus the number of the nodes in the network and in different pause time for the original AODV and E-AODV. As seen in Fig. 10, the number of alive nodes decreases with the number of nodes in the network because the network load is increased.

Comparison of number of alive nodes with number of nodes

Comparison of number of alive nodes with pause time
Figure 11 gives the number of alive nodes with varying pause time, with increase in pause time the network is less mobile and the packets control become fewer. That’s why there is an increasing number of alive nodes.
6 Conclusion
We examine the performance differences of AODV and E-AODV. We measure Normalized Routing Load, Packet delivery ratio, Total Energy Consumption and Number of Alive Nodes as QoS parameters. AODV always uses shortest hop route, so congestion occurs and distribution of load is not considered. Also, AODV does not consider available node energy of nodes for path selection and communication purposes. In this paper, algorithm with the addition of energy metric is given and simulation is performed using NS2.
Our simulation results show that E-AODV outperforms AODV for number of alive nodes by 25 to 30% with considering performance parameters as pause time and node density. The E-AODV decreases the probability for dropping packets by selecting the paths which have more energy. So it helps to save the data rate as well.
The present research work can be extended to design and develop new routing protocols to meet the following additional desirable features.
Robust Scenario- A routing protocol must work with robust scenarios where mobility is high, area is large and with the both TCP and UDP traffic.
Probabilistic Route Maintenance- A more research in the field like probabilistic route maintenance is required to identify the probability of route failure before the occurrences of route failures.
References
Perkins, C.E., Belding-Royer, E.M., Das, S.: Ad hoc On-Demand Distance Vector (AODV) Routing. Internet Request for Comments RFC 3561, Internet Engineering Task Force, July 2003
Perkins, C.E., Bhagwat, P.: Highly dynamic destination sequenced distance-vector routing (DSDV) for mobile computers. In: ACM SIGCOMM, pp. 234–244, August 1994
Kim, J.-M., Jang, J.-W.: AODV based energy efficient routing protocol for maximum lifetime in MANET. IEEE (2006)
Tamilarasi, M., Palanivelu, T.G.: Integrated energy-aware mechanism for MANETs using on demand routing. Int. J. Comput. Inf. Eng. 2, 212–216 (2008)
Yin, S., Lin, X.: Multipath minimum energy routing in ad hoc network. In: Proceedings of the International Conference on Communications (ICC), pp. 3182–3186. IEEE (2005)
Singh, R., Gupta, S.: EE-AODV: energy efficient AODV routing protocol by optimizing route selection process. Int. J. Res. Comput. Commun. Technol. 3(1), 158–163 (2014)
Manickam, P., Manimegalai, D.: A highly adaptive fault tolerant routing protocol for energy constrained mobile ad hoc networks. J. Theor. Appl. Inf. Technol. 57(3), 388–397 (2013)
El Fergougui, A., Jamali, A., Naja, N., El Ouadghiri, D., Zyane, A.: Improved aodv routing protocol based on the energy model. J. Theor. Appl. Inf. Technol. 76(3), 366–372 (2015)
Elliott, E.O.: Estimates of error rates for codes on burst-error channels. Bell Syst. Tech. J. 42, 1977–1997 (1963)
Gilbert, E.: Capacity of a burst-noise channel. Bell Syst. Tech. J. 39, 1253–1266 (1960)
Janevski, T.: Book Traffic Analysis and Design of Wireless IP. Artech House, Boston (2003)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Faouzi, H., Er-rouidi, M., Moudni, H., Mouncif, H., Lamsaadi, M. (2017). Improving Network Lifetime of Ad Hoc Network Using Energy Aodv (E-AODV) Routing Protocol in Real Radio Environments. In: El Abbadi, A., Garbinato, B. (eds) Networked Systems. NETYS 2017. Lecture Notes in Computer Science(), vol 10299. Springer, Cham. https://doi.org/10.1007/978-3-319-59647-1_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-59647-1_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59646-4
Online ISBN: 978-3-319-59647-1
eBook Packages: Computer ScienceComputer Science (R0)