
Abstract
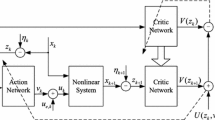
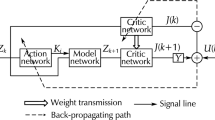
In this study, a nonquadratic performance function is introduced to overcome the saturation nonlinearity in actuators. Then a novel solution, generalized policy iteration adaptive dynamic programming algorithm, is applied to deal with the problem of optimal control. To achieve this goal, we use two neural networks to approximate control vectors and performance index function. Finally, this paper focuses on an example simulated on Matlab, which verifies the excellent convergence of the mentioned algorithm and feasibility of this scheme.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In the control field, saturation nonlinearity of the actuators is universal phenomenon. So optimizing control of systems in which actuators have problem of saturating nonlinearity, is a major and increasing concern [1, 2]. However, these traditional methods were proposed without considering the optimal control problem. In order to overcome this shortcoming, Lewis et al. [3] used adaptive dynamic programming (ADP) algorithm. The ADP algorithm [4,5,6], an effective brain-like method, which can give the solution to Hamilton-Jacobi-Bellman (HJB) equation forward-in-time, provides an important way of obtaining policy of optimizing control. The value and policy iteration algorithms [7, 8] are key of the ADP algorithms. Considering the superiority of ADP algorithm, growing researchers chose ADP algorithm in terms of optimal control. Zhang et al. [9] used greedy ADP algorithm to design the infinite-time optimal tracking controller. Qiao et al. [10] applied ADP algorithm to a large wind farm and a STATCOM, with focusing on Coordinated reactive power control. Liu et al. [11] developed an optimizing controller for some systems which were discrete-time nonlinear and had control constraints by DHP. As mentioned in [12], ADP algorithm is also suitable for time-delay systems with the same saturation challenge as above. However, in order to realize constrained optimal control, there is still no research using the generalized policy iteration ADP algorithm.
This paper focuses on the generalized policy iteration ADP algorithm. The present algorithm has i-iteration and j-iteration. When j is equal to zero, the proposed algorithm will be a value iteration algorithm, while becoming a policy iteration algorithm when j approaches the infinity. Firstly, the nonquadratic performance function is introduced to overcome the saturation nonlinearity. Then, the process of the generalized policy iteration algorithm is given. Lastly, the simulation results verify the efficiency of the developed method.
2 Problem Statement
We will study the following discrete-time nonlinear systems:
where \(u_k\in {\mathbb {R}}^m\) is control vector, \(x_k\in {{\mathbb {R}}^{n}}\) is the state vector, \(f(x_k)\in ~{\mathbb {R}}^n\) and \(g(x_k)\in {\mathbb {R}}^{n\times m}\) are system functions. We denote \({{\varOmega }_{u}}=\{ u_k|u_k={{[ {{u}_{1k}},{{u}_{2k}},\ldots ,{{u}_{mk}} ]}^{\mathsf {T}}}\in {{\mathbb {R}}^{m}},| {{u}_{ik}} |\le {{{\overline{u}}}_{i}},i=1,2,\ldots ,m \}\), where \({{\overline{u}}_{i}}\) can be regarded as the saturating bound. Let \(\overline{U}=diag[{{\overline{u}}_{1}},{{\overline{u}}_{2}},\ldots ,{{\overline{u}}_{m}}]\).
The generalized nonquadratic performance index function is \(J(x_k,{\underline{u}}_k)=\sum \limits _{i=k}^{\infty }{\left\{ x{_{i}^{\mathsf {T}}}Qx_i+W(u_i) \right\} }\), where \({\underline{u}}_k=\left\{ u_k,u_{k+1},u_{k+2},\ldots \right\} \), the weight matrix Q and \(W(u_i)\in \mathbb {R}\) are positive definite.
Inspired by the paper [3], we can introduced \( W(u_i)=2\int _{0}^{u_i}{{{\varLambda }^{-{\mathsf {T}}}}({{{\overline{U}}}^{-1}}s)\overline{U}Rds}\), where R is positive definite, \(s\in {{\mathbb {R}}^{m}}\), \(\varLambda \in {{\mathbb {R}}^{m}}\), \({{\varLambda }^{-{\mathsf {T}}}}\) denotes \({{({{\varLambda }^{-1}})}^{\mathsf {T}}}\), and \(\varLambda (\cdot )\) can choose \(\tanh (\cdot )\).
Then we can use \({{J}^{*}}(x_k)=\underset{{\underline{u}}_k}{\mathop {\min }}\,J(x_k,{\underline{u}}_k)\) to stand for the optimal performance index function and use \(u_{k}^{*}\) to be the optimal control vector. So from the principle of discrete-time Bellman’s optimality, we can obtain the optimal performance index function as
And we can use the following equation to stand for the optimal control vector:
The goal of this paper is to get the optimal control vector \({u_{k}^{*}}\) and the optimal performance index function \({{J}^{*}}(x_k)\).
3 Derivation of the Generalized Policy Iteration ADP Algorithm
From [16], it’s known that the traditional ADP algorithm just have one iteration procedure. However, the generalized policy iteration ADP algorithm has i-iteration and j-iteration. Specially, for i-iteration, the generalized policy iteration ADP algorithm doesn’t need to solve the HJB equation, which speed the convergence rate of the developed ADP algorithm.
According to [17], if a control vector can stabilize the system (1) and make the performance index function finite at the same time, it can be concluded that the control vector is admissible.
Next, we will get that the control vector and cost function of the developed generalized policy iteration ADP algorithm are updated in each iteration. First, the cost function \({{V}_{0}}(x_k)\) can be initialed as follows:
where the \({{{v}}_{0}(x_k)}\) is an initial admissible control vector. Then, for \(i=1\), the control vector \({{{v}}_{1}}(x_k)\) can be gained by:
Then, we will introduced the second iteration procedure. Define an arbitrary non-negative integer sequence, that is \(\{ {{L}_{1}},{{L}_{2}},{{L}_{3}},\ldots \}\). \({{L}_{1}}\) is the upper boundary of \({{j}_{1}}\). When \({{j}_{1}}\) increases from 0 to \({{L}_{1}}\), we can have the iterative cost function by
where
In the second iteration, the cost function changes to be \({{V}_{1}}(x_k)={{V}_{1,{{L}_{1}}}}(x_k)\). For \(i=2,3,4,\ldots \), the control vector and cost function of the developed ADP algorithm are updated by:
-
(1)
i-iteration
$$\begin{aligned} {{{v}}_{i}}(x_k)=\arg \underset{u_k}{\mathop {\min }}\,\left\{ x{_{k}^{\mathsf {T}}}Qx_k+2\int _{0}^{u_k}{{{\varLambda }^{-{\mathsf {T}}}}({{\overline{U}}^{-1}}s)\overline{U}Rds}+{{V}_{i-1}}(F(x_k,u_k))\right\} , \end{aligned}$$(8) -
(2)
j-iteration
$$\begin{aligned} {{V}_{i,{{j}_{i}}+1}}(x_k)=x{_{k}^{\mathsf {T}}}Qx_k+2\int _{0}^{{v}_{i}(x_k)}{{{\varLambda }^{-{\mathsf {T}}}}({{\overline{U}}^{-1}}s)\overline{U}Rds}+{{V}_{i,{{j}_{i}}}}(F(x_k,{{{v}}_{i}}(x_k))), \end{aligned}$$(9)where \({{j}_{i}}=0,1,2,\ldots , L_i\),
$$\begin{aligned} {{V}_{i,0}}(x_k)=x{_{k}^{\mathsf {T}}}Qx_k+2\int _{0}^{{v}_{i}(k)}{{{\varLambda }^{-{\mathsf {T}}}}({{\overline{U}}^{-1}}s)\overline{U}Rds}+{{V}_{i-1}}(F(x_k,{{{v}}_{i}}(x_k))) \end{aligned}$$(10)and we can get the iterative cost function by
$$\begin{aligned} {{V}_{i}}(x_k)={{V}_{i,{{L}_{i}}}}(x_k). \end{aligned}$$(11)
From (4)–(11), we make use of \({{V}_{i,{{j}_{i}}}}(x_k)\) to approximate \({{J}^{*}(x_k)}\) and \({{{v}}_{i}}(x_k)\) to approximate \(u_{k}^{*}\). In the following, an example is applied to illustrate the convergence and feasibility of the presented ADP algorithm.
4 Simulation Example
The following nonlinear system is mass-spring system:
where
and the system is controlled with control constraint of \(\left| u \right| \le 0.6\). The cost function is defined by
where \(Q=\left[ \begin{array}{ll} 1 &{} 0 \\ 0 &{} 1 \\ \end{array} \right] \), \(R=0.5\), \(\overline{U}=0.6\).
The developed iteration ADP algorithm is implemented by NNs. The hidden layers of the critic network and action network both are 10 neurons. For each iteration step, we train the networks for 4000 training steps so as to make the training error become minimum. The learning rate of the above two networks both are 0.01.
From Fig. 1(a) and (b), we can get the convergent process of the cost function \({{V}_{i,{{j}_{i}}}}(x_k)\) and the subsequence \({{V}_{i}}(x_k)\). Next, we use the optimal control vectors to control the system (12) with the initial state \(x(0)={{\left[ 1,-1 \right] }^{\mathsf {T}}}\) for 200 time steps. Figure 1(c) and (d) display the changing curves of the state x and the control u. The effective of the presented ADP algorithm in handling optimal control problem for discrete-time nonlinear systems with actuator saturation is verified through the simulation results.

Simulation results (a) Convergence of \({{V}_{i,{{j}_{i}}}}\) (b) Convergence of \({{V}_{i}}\) (c) State trajectories (d) Control vectors
5 Conclusion
In this paper, a novel ADP algorithm is chosen to treat the optimal control problem for discrete-time nonlinear systems with control constraint. One example demonstrates the convergence and feasibility of the presented iteration ADP algorithm. Since the time-delay problem is another hot topic in the control field, it’s significant to use the developed ADP algorithm to handle the time-delay systems in the future.
References
Saberi, A., Lin, Z., Teel, A.: Control of linear systems with saturating actuators. IEEE Trans. Autom. Control 41(3), 368–378 (1996)
Sussmann, H., Sontag, E., Yang, Y.: A general result on the stabilization of linear systems using bounded controls. IEEE Trans. Autom. Control 39(12), 2411–2425 (1994)
Abu-Khalaf, M., Lewis, F.: Nearly optimal control laws for nonlinear systems with saturating actuators using a neural network HJB approach. Automatica 41(5), 779–791 (2005)
Werbos, P.: Approximate dynamic programming for real-time control and neural modeling. In: White, D.A., Sofge, D.A. (eds.) Handbook of Intelligent Control: Neural, Fuzzy, and Adaptive Approaches (1992)
Liu, D., Wang, D., Zhao, D., et al.: Neural-network-based optimal control for a class of unknown discrete-time nonlinear systems using globalized dual heuristic programming. IEEE Trans. Autom. Sci. Eng. 9(3), 628–634 (2012)
Wei, Q., Song, R., Yan, P.: Data-driven zero-sum neuro-optimal control for a class of continuous-time unknown nonlinear systems with disturbance using ADP. IEEE Trans. Neural Netw. Learn. Syst. 27(2), 444–458 (2016)
Wei, Q., Liu, D., Shi, G., et al.: Optimal multi-battery coordination control for home energy management systems via distributed iterative adaptive dynamic programming. IEEE Trans. Industr. Electron. 42(7), 4203–4214 (2015)
Bhasin, S., Kamalapurkar, R., Johnson, M., et al.: A novel actorcritic- identifier architecture for approximate optimal control of uncertain nonlinear systems. Automatica 49(1), 82–92 (2013)
Zhang, H., Wei, Q., Luo, Y.: A novel infinite-time optimal tracking control scheme for a class of discrete-time nonlinear systems via the greedy HDP iteration algorithm. IEEE Trans. Syst. Man Cybern.-Part B: Cybern. 38(4), 937–942 (2008)
Qiao, W., Harley, R.G., Venayagamoorthy, G.K.: Coordinated reactive power control of a large wind farm and a STATCOM using heuristic dynamic programming. IEEE Trans. Energy Convers. 24(2), 493–503 (2009)
Liu, D., Wang, D., Yang, X.: An iterative adaptive dynamic programming algorithm for optimal control of unknown discrete-time nonlinear systems with constrained inputs. Inf. Sci. 220(1), 331–342 (2013)
Song, R., Zhang, H., Luo, Y., et al.: Optimal control laws for time-delay systems with saturating actuators based on heuristic dynamic programming. Neurocomputing 73, 3020–3027 (2010)
Vrabie, D., Vamvoudakis, K., Lewis, F.: Adaptive optimal controllers based on generalized policy iteration in a continuous-time framework. In: 17th Mediterranean Conference on Control & Automation, Thessaloniki, Greece, pp. 1402–1409 (2009)
Lin, Q., Wei, Q., Liu, D.: A novel optimal tracking control scheme for a class of discrete-time nonlinear systems using generalized policy iteration adaptive dynamic programming algorithm. Int. J. Syst. Sci. 48(3), 525–534 (2017)
Apostol, T.: Mathematical Analysis, 2nd edn. Addison-Wesley Press
Wang, F., Zhang, H., Liu, D.: Adaptive dynamic programming: an introduction. IEEE Comput. Intell. Mag. 4(2), 39–47 (2009)
Liu, D., Wei, Q.: Policy iteration adaptive dynamic programming algorithm for discrete-time nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 25(3), 621–634 (2014)
Acknowledgments
This work was supported partly by the National Natural Science Foundation of China (Nos. 61374105, 61374051, 61533017, 61233001, 61273140, 61304086 and U1501251).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Lin, Q., Wei, Q., Zhao, B. (2017). A Generalized Policy Iteration Adaptive Dynamic Programming Algorithm for Optimal Control of Discrete-Time Nonlinear Systems with Actuator Saturation. In: Cong, F., Leung, A., Wei, Q. (eds) Advances in Neural Networks - ISNN 2017. ISNN 2017. Lecture Notes in Computer Science(), vol 10262. Springer, Cham. https://doi.org/10.1007/978-3-319-59081-3_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-59081-3_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59080-6
Online ISBN: 978-3-319-59081-3
eBook Packages: Computer ScienceComputer Science (R0)