
Abstract
Currently, the most prominent application of distance geometry is related to molecular geometry. Specifically, the problem is the calculation of the 3D protein structure using distance information obtained from Nuclear Magnetic Resonance (NMR) experiments [79, 80]. It is worth mentioning that the 2002 Nobel Prize in Chemistry was awarded to the chemist Kurt Wüthrich for the development of the application of NMR to determine protein structures using distance information related to atoms that are close enough to be detected by NMR experiments.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

6.1 The DMDGP and 3D Protein Structures
Currently, the most prominent application of distance geometry is related to molecular geometry. Specifically, the problem is the calculation of the 3D protein structure using distance information obtained from Nuclear Magnetic Resonance (NMR) experiments [79, 80]. It is worth mentioning that the 2002 Nobel Prize in Chemistry was awarded to the chemist Kurt Wüthrich for the development of the application of NMR to determine protein structures using distance information related to atoms that are close enough to be detected by NMR experiments.
Why is it important to know the three dimensional structure of a protein molecule? It is because the 3D structure of a molecule is strongly connected with its physicochemical properties. A classical example that illustrates this fact is the discovery of the three dimensional structure of DNA [78]. In 1953, the physicist Maurice Wilkins and the chemist Rosalind Franklin used X-ray diffraction, another technique to determine the structure of proteins [11], to “photograph” the DNA. The problem was to formulate a three dimensional model of a DNA molecule which matched the results of the X-ray diffraction and to explain some known chemical properties. In the same year, the biochemist James Watson and the biophysicist Francis Crick proposed a three dimensional model, the famous double helix, that explained all the available data about the DNA molecule known at the time. The model that arose suggested the mechanism by which transmission of the genetic information was achieved. The essential characteristic of the model is the complementarity of the two twisted strands of DNA. Watson and Crick realized, before the existence of data that verified their model, that the proposed structure could be reproduced by the separation of the two strands and by the synthesis of a complementary strand for each one. In 1958, the molecular biologist Matthew Meselson and the geneticist Franklin Stahl showed experimentally that the Watson and Crick’s model of replication of DNA works. With the model and its experimental verification, a revolution in the understanding of the process of heredity was started. Because of the discovery of the three dimensional structure of the DNA molecule, James Watson shared the 1962 Nobel Prize in Medicine with Francis Crick and Maurice Wilkins.
The genes of a living organism present in DNA are, indirectly, responsible for the physical characteristics of the organism, but the corresponding proteins are, in fact, what determine these characteristics. Inside of the cell, the DNA of a gene is transcribed in the messenger RNA and this transcription is translated in order to form the sequence of amino acids that gives arise to a protein molecule (Fig. 6.1). This process of transcription and translation is well understood [73]. However, there is still much to learn about the mechanism of the formation of the protein molecule from the sequence of amino acids provided by the messenger RNA. This process is called protein folding and the associated problem is known as the protein folding problem [17].

DNA and protein
We have already seen that the determination of the three dimensional structure of a protein molecule is an important problem, but what is the relation to the DMDGP? Havel and Wüthrich, in 1984 and 1985 [35, 36], wrote two articles showing how Distance Geometry can be applied to the calculation of protein structure by using NMR data. However, it was just in 1988 that the book “Distance Geometry and Molecular Conformation” [15] was published. Crippen and Havel established the fundamentals and connections between the two topics of research. Their proposed algorithm, called EMBED, uses the methods of linear algebra and optimization to solve the associated DGP.
Our proposal is to consider the problem as a DMDGP. For this, it is necessary to define an order on the atoms of a protein molecule which induces a vertex order on the corresponding DMDGP graph, given by v 1, …, v n . That is, we must have a valid realization for v 1, v 2, v 3 and, for all v i , i = 4, …, n, there must exist three immediate previous vertices v i−3, v i−2, v i−1 such that the vertices {v i−3, v i−2, v i−1, v i } form a clique with
This is the topic of the next section.
6.2 Ordering in Protein Molecules
Along with the information about the protein geometry, the NMR data provide distances between atoms as long as they are 5 angstroms \((\mathrm{\mathring A})\) or less apart. The problem becomes how to use this information to determine the coordinates of each atom of the protein molecule. The information from protein geometry tells us that the distances between atoms covalently bonded and the planar angles defined by three bonded consecutive atoms are known a priori. Clearly, the protein molecule is not a rigid structure, but these values can be considered fixed [27, 38].
This suggests a natural ordering on the atoms of the protein backbone, formed by a sequence of three atoms: N, C, C (Fig. 6.2). The protein backbone is the skeleton of the protein which already gives us a good idea of its 3D structure. For this monograph, we restrict ourselves to the protein backbone. In [14, 71], we find proposals for considering side chains (see Fig. 6.2) that distinguish between the 20 amino acids that form a protein molecule [19]. Since the distances between atoms i and i + 3 in the protein backbone are smaller than \(5\mathrm{\mathring A}\) (in general), we can suppose that they are detected by the NMR experiments and this will provide us with the desired ordering. However, most of the NMR data are associated with pairs of hydrogen atoms [79]. An option would be to define an ordering involving just atoms of hydrogen, incorporating hydrogen atoms from the side chains, and also allowing atom repetitions in the order (Fig. 6.3).

Backbone protein with side chains

Order on hydrogen atoms
Chemically, it does not make sense to consider two atoms in the same position, but we can do this in the ordering on the vertices of the associated graph (in fact, graph representation of a molecule is an old idea [76]). The repetition ensures that the distances d i−3, i are known, which may be null in some cases. From a computational viewpoint, this has an advantage because when we recalculate the position of a given repeated atom, we can verify that the numerical errors are under control [43].
Exercise 6.1
Verify in the Fig. 6.3 which pairs of atoms are repetitions.
Exercise 6.2
What happens when some of the distances, say d i−1, i or d i−2, i , are null?
Suppose that, when we apply the BP algorithm, we find the positions of hydrogen atoms bonded to the protein backbone. How do we determine the positions of atoms in this chain that are of interest to us? We leave the answer to this question for the next two exercises. Remember that in Chap. 4, we saw that the intersection of four spheres, under some conditions, gives only one point.
Exercise 6.3
In the three situations depicted in Fig. 6.4, determine the quadratic systems corresponding to the intersection of four spheres.

Determination of the protein backbone using the positions of the hydrogen atoms
Exercise 6.4
Show that, for each system, there exists only one solution.
There are three important aspects about the problem that we are trying to solve:
-
1.
Distances are known (from NMR) just between close atoms,
-
2.
Distances are known (from NMR) just between hydrogen atoms,
-
3.
We need to solve two subproblems: (i) The calculation of the positions of the hydrogen atoms and (ii) The calculation of the positions of the atoms in the protein backbone.
Actually, there exists another more complicated problem:
-
The distances from NMR data, between neighboring hydrogen atoms, are not accurate values.
The analysis of the DMDGP considering uncertainties in the distances is a difficult problem. Some preliminaries results can be found in [4, 13, 48, 63, 74, 75]. Recall that all results that we presented in this monograph are based on the assumption that all distances are precise (real numbers), free from any error/uncertainty. However, we know that any measurements, such as those related to NMR experiments, have associated errors. In this case, we can consider that the data provided by NMR are intervals of real numbers which contain the correct distance. Even this hypothesis is an approximation of reality, since errors typically are unevenly distributed in the interval. Thus the problem is not trivial.
The good news is that this new problem provides us with an idea of how to solve Problem 3 above. We can create a new order with two main characteristics:
-
We consider hydrogen atoms and protein backbone atoms at the same time,
-
For the clique {v i−3, v i−2, v i−1, v i }, associated to the DMDGP graph, for i = 4, …, n, all the distances d i−1, i and d i−2, i can be considered as real numbers (since they are related to bond lengths and bond angles) and just the distances d i−3, i are considered to have errors, modeled as intervals.
Exercise 6.5
Based on Fig. 6.5, verify that the distances d i−1, i and d i−2, i can be considered as real numbers.

Order with hydrogen and protein backbone atoms
Exercise 6.6
Based on Fig. 6.5, verify that some of the distances d i−3, i may be considered as degenerate intervals, that is, d i−3, i = 0.
Exercise 6.7
What would a BP search tree look like if we consider that the distances d i−3, i are intervals?
Exercise 6.8
What are the modifications necessary in the BP algorithm to incorporate interval distances?
6.3 The Polynomial Performance of the BP Algorithm
We already know that, if a given instance of the DMDGP, for all i = 5, …, n, has an extra edge {v j , v i } ∈ E, with j < i − 3, such that the vertices {v j , v i−3, v i−2, v i−1} generate a set of noncoplanar points, there will exist only one valid realization of the associated graph which can be computed in linear time. In general, this situation does not occur in problems related to 3D protein structures. However, we proved that under certain assumptions verified in many proteins the BP is Fixed-Parameter Tractable, which means that its exponential behavior only depend on single parameter rather than the whole size of the instance. We also verified that for several protein instances this parameter could be fixed at a constant, which suggests that the DMDGP might be a tractable problem on protein instances with exact data [56]. In part this can be explained by the fact that the protein backbone of many proteins is “tightly packed” (Fig. 6.1). The more “stretched out” the protein molecule is, the lower will be the cardinality of the pruning set E p , causing more branches in the BP search tree.
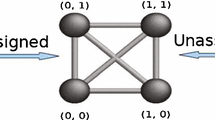
We need to think of the BP tree as a whole and not as it is partially constructed at each step of BP, in order to have an idea of the “global behavior” of the algorithm. When the set of the pruning edges is empty, E p = ∅, the BP tree is full, representing the entire search space. There is no difficulty in finding one solution in linear time, because it is sufficient go down the tree, by choosing any one of the two possibilities at each step of the algorithm. Since E p = ∅, there is no possibility of errors at time of making a choice. Clearly, it is unthinkable to find all the solutions for very large n, because the solution set has cardinality 2n−3 (Fig. 6.6). On the other hand, suppose we have a situation described in the first paragraph of this section: for all i = 5, …, n, there exists an extra edge {v j , v i } ∈ E p with j < i − 3. In this case, we have “only one” solution which can be found in linear time (the other one is symmetric to the plane defined by v 1, v 2, v 3), since we know what is the correct decision to be made at each step of BP (Fig. 6.7).

BP tree with E P = ∅

Unique solution found in linear time
Increases in the computational cost of the BP algorithm are due to the required return back up the tree, when none of the calculated positions for a given vertex v is compatible with the edges {u, v} ∈ E p , for u < v − 3 (at some previous level of the tree, a wrong decision was made). The reason that the BP algorithm is required to backtrack the tree, preventing it from an “unhindered descend” is the following:
-
There exists at least one vertex v j in the DMDGP order, v 1, …, v j , …, v n , whose only previous vertices u, {u, v j } ∈ E, are those used in the construction of the tree: v j−3, v j−2, v j−1.
This means that whenever this happens, there is a duplication of the number of nodes at level j of the tree, compared to the previous level. The problem is further aggravated when there exists a set of consecutive vertices v j , …, v j+k , for which the situation mentioned above holds, expanding the search space quickly. Suppose, for example, that at level j = 50 of the tree there exists 220 = 1, 048, 576 positions that satisfy our given data. With k = 5, the number of possible solutions becomes 225 = 33, 554, 432!
Before we make concluding remarks of this monograph, we mention that the computational cost of the BP algorithm can be reduced in at least two ways:
References
Alves, R., Lavor, C.: Geometric algebra to model uncertainties in the discretizable molecular distance geometry problem. Adv. Appl. Clifford Algebr. doi:10.1007/s00006-016-0653-2
Brünger, A., Nilges, M.: Computational challenges for macromolecular structure determination by X-ray crystallography and solution NMR-spectroscopy. Q. Rev. Biophys. 26, 49–125 (1993)
Cassioli, A., Bordeaux, B., Bouvier, G., Mucherino, A., Alves, R., Liberti, L., Nilges, M., Lavor, C., Malliavin, T.: An algorithm to enumerate all possible protein conformations verifying a set of distance constraints. BMC Bioinform. 16, 16–23 (2015)
Costa, V., Mucherino, A., Lavor, C., Cassioli, A., Carvalho, L., Maculan, N.: Discretization orders for protein side chains. J. Glob. Optim. 60, 333–349 (2014)
Crippen, G., Havel, T.: Distance Geometry and Molecular Conformation. Wiley, New York (1988)
Dill, K., MacCallum, J.: The protein-folding problem, 50 years on. Science 338, 1042–1046 (2012)
Donald, B.: Algorithms in Structural Molecular Biology. MIT Press, Boston (2011)
Fidalgo, F., Rodriguez, J.: Quaternions as a tool for merging multiple realization trees. In: Andrioni, A., Lavor, C., Liberti, L., Mucherino, A., Maculan, N., Rodriguez, R. (eds.) Proceedings of the Workshop on Distance Geometry and Applications, pp. 119–124. Universidade Federal do Amazonas, Manaus (2013)
Gibson, K., Scheraga, H.: Energy minimization of rigid-geometry polypeptides with exactly closed disulfide loops. J. Comput. Chem. 18, 403–415 (1997)
Gramacho, W., Mucherino, A., Lavor, C., Maculan, N.: A parallel BP algorithm for the discretizable distance geometry problem. In: IEEE Proceedings of the Workshop on Parallel Computing and Optimization, Shanghai, pp. 1756–1762 (2012)
Havel, T., Wüthrich, K.: A distance geometry program for determining the structures of small proteins and other macromolecules from nuclear magnetic resonance measurements of1H-1H proximities in solution. Bull. Math. Biol. 46, 673–698 (1984)
Havel, T., Wüthrich, K.: An evaluation of the combined use of nuclear magnetic resonance and distance geometry for the determination of protein conformation in solution. J. Mol. Biol. 182, 281–294 (1985)
Jackson, B., Jordán, T.: On the rigidity of molecular graphs. Combinatorica 28, 645–658 (2008)
Lavor, C., Mucherino, A., Liberti, L., Maculan, N.: On the computation of protein backbones by using artificial backbones of hydrogens. J. Glob. Optim. 50, 329–344 (2011)
Lavor, C., Liberti, L., Mucherino, A.: The interval branch-and-prune algorithm for the discretizable molecular distance geometry problem with inexact distances. J. Glob. Optim. 56, 855–871 (2013)
Liberti, L., Lavor, C., Mucherino, A.: The discretizable molecular distance geometry problem seems easier on proteins. In: Mucherino, A., Lavor, C., Liberti, L., Maculan, N. (eds.) Distance Geometry: Theory, Methods, and Applications, pp. 47–60. Springer, New York (2013)
Mucherino, A.: On the identification of discretization orders for distance geometry with intervals. Lect. Notes Comput. Sci 8085, 231–238 (2013)
Mucherino, A., Lavor, C., Liberti, L., Talbi, E.-G.: A parallel version of the branch & prune algorithm for the molecular distance geometry problem. In: ACS/IEEE Proceedings of the International Conference on Computer Systems and Applications, Hammamet, pp. 1–6 (2010)
Nucci, P., Nogueira, L., Lavor, C.: Solving the discretizable molecular distance geometry problem by multiple realization trees. In: Mucherino, A., Lavor, C., Liberti, L., Maculan, N. (eds.) Distance Geometry: Theory, Methods, and Applications, pp. 161–176. Springer, New York (2013)
Sallaume, S., Martins, S., Ochi, L., Gramacho, W., Lavor, C., Liberti, L.: A discrete search algorithm for finding the structure of protein backbones and side chains. Int. J. Bioinform. Res. Appl. 9, 261–270 (2013)
Schlick, T.: Molecular Modelling and Simulation: An Interdisciplinary Guide. Springer, New York (2002)
Souza, M., Xavier, A., Lavor, C., Maculan, N.: Hyperbolic smoothing and penalty techniques applied to molecular structure determination. Oper. Res. Lett. 39, 461–465 (2011)
Souza, M., Lavor, C., Muritiba, A., Maculan, N.: Solving the molecular distance geometry problem with inaccurate distance data. BMC Bioinform. 14, S71–S76 (2013)
Sylvester, J.: Chemistry and algebra. Nature 17, 284–284 (1877)
Watson, J., Crick, F.: Molecular structure of nucleic acids: a structure for deoxyribose nucleic acid. Nature 171, 737–738 (1953)
Wüthrich, K.: Protein structure determination in solution by nuclear magnetic resonance spectroscopy. Science 243, 45–50 (1989)
Wüthrich, K.: The way to NMR structures of proteins. Nat. Struct. Biol. 8, 923–925 (2001)
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2017 The Author(s)
About this chapter
Cite this chapter
Lavor, C., Liberti, L., Lodwick, W.A., Mendonça da Costa, T. (2017). Distance Geometry and Molecular Geometry. In: An Introduction to Distance Geometry applied to Molecular Geometry. SpringerBriefs in Computer Science. Springer, Cham. https://doi.org/10.1007/978-3-319-57183-6_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-57183-6_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-57182-9
Online ISBN: 978-3-319-57183-6
eBook Packages: Computer ScienceComputer Science (R0)