
Abstract
Spatially dense operating deflection shapes and mode shapes can be rapidly obtained by use of a continuously scanning laser Doppler vibrometer (CSLDV) system, which sweeps its laser spot over a vibrating structure surface. This paper introduces a new type of vibration shapes called a free response shape (FRS) that can be obtained by use of a CSLDV system, and a new damage identification methodology using FRSs is developed for beam structures. An analytical expression of FRSs of a damped beam structure is derived, and FRSs from the analytical expression compare well with those from a finite element model. In the damage identification methodology, a free-response damage index (FRDI) is proposed, and damage regions can be identified near neighborhoods with consistently high values of FRDIs associated with different modes. The proposed methodology was numerically applied to identify damage in a beam structure.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Damage identification
- Beam structure
- Continuously scanning laser Doppler vibrometer system
- Free response shape
- Free-response damage index
7.1 Introduction
Vibration-based damage detection has become a major research topic of structural dynamics in the past few decades [1]. Changes of physical properties of a structure, such as mass, stiffness and damping, are directly related to those of modal properties of the structure, i.e., natural frequencies, mode shapes (MSs) and modal damping ratios [2]. Damage that exist in a structure can be detected, located and characterized by use of modal properties. Methods that use changes of natural frequencies due to damage have been investigated by many researchers. They require a minimum amount of vibration measurement and can accurately detect locations and extent of damage, since natural frequencies are global properties of a structure and relatively easy to measure [3–8]. However, spatial information of structural property changes due to occurrence of damage cannot be directly obtained by use of natural frequencies, and one needs to construct accurate, physics-based models in order to apply the methods [3–8], which can be difficult to achieve in practice, especially for complex large-scale structures. Since occurrence of damage can introduce local abnormalities in MSs near damage regions [9], unlike use of natural frequencies, the damage can be identified by inspecting smoothness of MSs without necessity of constructing models of structures. Being more sensitive to damage of small extent than MSs, curvatures of MSs (CMSs) are more often used to locate damage [10]. Effects of damage in a beam structure can be observed as severer local abnormalities in its CMSs than in MSs, and one can isolate the effects by comparing a CMS of the damaged beam structure with that of an undamaged one. It was shown that relatively large differences between a CMS of a damaged beam structure and that of an undamaged one mainly occur near a region of damage and the differences increase as severity of damage increases [10]. CMS-based and wavelet-transform-based methods were proposed in [11] to identify embedded horizontal cracks in beam structures, where global trends of CMSs and wavelet transforms of MSs were eliminated by use of MSs from polynomials that fit MSs of cracked beam structures with properly determined orders in a global manner.
A laser Doppler vibrometer (LDV) is capable of accurate, non-contact surface vibration measurement; its mechanism is based on Doppler shifts between the incident light from and scattered light to the system [12]. The concept of a continuously scanning LDV (CSLDV) system was first proposed in [13, 14]. A CSLDV system continuously sweeps its laser over a surface of a structure under sinusoidal excitation to obtain its ODSs, which can be approximated by Chebyshev series with coefficients determined by processing velocities measured by the system. Two CSLDV measurement methods were later proposed to obtain ODSs of a structure under sinusoidal excitation: demodulation and polynomial methods [15, 16]. A “lifting” method was proposed to obtain MSs from measured free response of a structure, where velocities measured by a CSLDV system are treated as output of linear time-periodic systems [17]. Use of a CSLDV system for damage identification was first proposed in [18], where the demodulation method was used to obtain ODSs of various structures by scanning their cracked surfaces, and effects of cracks could be observed as local abnormalities in obtained ODSs. The demodulation and polynomial methods were synthesized to identify damage in beams, where damage can be identified by use of a CSLDV system that scans intact surfaces of damaged beam structures [19].
In this work, a new type of vibration shapes called a free response shape (FRS) that can be obtained by use of a CSLDV system is introduced. An analytical expression of FRSs of a damped beam structure is derived. It is shown in the analytical expression that amplitudes of FRSs exponentially decay to zero with time. A finite element model of a damped beam structure is constructed, and a CSLDV system is simulated to measure its free response. FRSs associated with the structure are obtained from the response measured by the simulated CSLDV system from the demodulation method, and they are compared with those from the analytical expression. A new damage identification methodology that uses FRSs is proposed for beam structures. A free-response damage index (FRDI) is defined, which consists of differences between curvatures of FRSs obtained by use of a CSLDV system and those from polynomials that fit the FRSs, and damage regions can be identified near neighborhoods with consistently high values of FRDIs associated with different modes. Effectiveness of the methodology for identifying damage in a beam structure is numerically investigated.
7.2 Methodology
7.2.1 Free Response of a Damped Beam Structure
A linear time-invariant Euler-Bernoulli beam structure with a uniform cross-section is considered. The structure has a length L, a bending stiffness EI and a linear mass density m. It is viscously damped, and damping effects are modeled using the Kelvin-Voigt viscoelastic model with a damping coefficient c [20, 21]. Excitation in the form of a single impulse with an intensity G 0 is applied to the structure at position x = L 0 at time t = 0. Response of the structure can be obtained by solving its governing partial differential equation
with given boundary and initial conditions, where \(y\left (x,t\right )\) is the displacement of the structure at position x at time t. Based on the expansion theorem [20], a solution to Eq. (7.1) can be expressed by
where \(Y _{h}\left (x\right )\) is the mass-normalized eigenfunction of the hth mode of the corresponding undamped structure and \(\eta _{h}\left (t\right )\) is the corresponding time function. The eigenfunction \(Y _{h}\left (x\right )\) can be expressed by
where C 1, C 2, C 3, C 4 and β h are determined by the boundary conditions and the orthonormality condition of eigenfunctions
in which δ h, j is the Kronecker delta. The time function \(F_{h}\left (t\right )\) can be obtained by solving an ordinary differential equation
with initial conditions \(F_{h}\left (0\right )\) and \(\dot{F}_{h}\left (0\right )\) determined by those of Eq. (7.1), where f h is the natural frequency of the undamped structure in Hz associated with its hth mode. A relation between β h and f h can be expressed by
The solution to Eq. (7.5) can be expressed by Rao [22]
where
is an amplitude constant and
is a phase angle;
and
are the damping ratio and damped natural frequency of the structure associated with its hth mode, respectively. Based on Eqs. (7.2) and (7.7), \(y\left (x,t\right )\) can be expressed by
7.2.2 FRS
A FRS associated with the hth mode of the beam structure can be defined by
and Eq. (7.12) becomes
It can be seen that Y h , which can be considered as a MS associated with the hth mode, exists in the definition of a FRS in Eq. (7.13). A similarity between Y h and ϕ h is that they both correspond to the same mode of the structure. Since a MS describes amplitude ratios of displacement, velocity or acceleration at different positions on the structure while it vibrates, the multiplication factor of the MS can be an arbitrarily chosen non-zero constant, and the MS can be considered time-invariant. However, ϕ h differs from Y h due to two extra terms in Eq. (7.13), i.e., A h and \(\mathrm{e}^{-2\pi f_{h}\xi _{h}t}\). The coefficient A h is determined by the initial conditions of and impulse to the structure, and \(\mathrm{e}^{-2\pi f_{h}\xi _{h}t}\) indicates that amplitudes of ϕ h at different positions exponentially decay to zero with time. Hence, A h cannot be arbitrarily chosen, and ϕ h is time-varying.
A CSLDV system continuously sweeps its laser spot over a vibrating structure surface with a specific scan pattern. It can measure response of a measurement point, where its laser spot is located during a scan, and a finite number of modes of a structure are included in free response measured by a CSLDV system. Let \(\tilde{x}\left (t\right )\) be the position of a laser spot on a beam structure at time t; free response of the structure measured by the CSLDV system with a straight scan line along its length can be expressed by
where n is the number of measured modes, and \(\tilde{\phi }_{h}\) and \(\tilde{\eta }_{h}\) are the FRS and time function associated with the hth mode measured by the system, respectively. The FRS \(\tilde{\phi }_{h}\) in Eq. (7.15) can be defined in a way similar to ϕ h in Eq. (7.13):
A major difference between ϕ h in Eq. (7.13) and \(\tilde{\phi }_{h}\) is that x in the former becomes \(\tilde{x}\) in the latter, which is a function of t and is unique in a scan of the system. Similar to ϕ h , \(\tilde{\phi }_{h}\) contains both A h and \(\mathrm{e}^{-2\pi f_{h}\zeta _{h}t}\), and it is time-varying. The time function \(\tilde{\eta }_{h}\) can be expressed by
where α h is the difference between a phase determined by the initial conditions and impulse associated with the hth mode and that by a mirror feedback signal, and θ h is a phase variable that controls amplitudes of in-phase and quadrature components of \(\tilde{\phi }_{h}\), which can be expressed by
and
respectively [19].
7.2.3 Demodulation Method for FRSs
The demodulation method has been proposed to obtain MSs and ODSs of a structure under sinusoidal excitation [16], where its steady-state response measured by a CSLDV system are analyzed. FRSs of a linear damped beam structure measured by a CSLDV system, as described by \(\tilde{\phi }_{h}\) in Eq. (7.16), can also be obtained from the demodulation method by analyzing its free response of half-scan periods measured by the system, and each obtained \(\tilde{\phi }_{h}\) corresponds to a mode in a half-scan period. A half-scan period starts when the laser spot of the system arrives at one end of a scan line, and it ends when the laser spot arrives at the other end. Hence, multiple \(\tilde{\phi }_{h}\) can be obtained from free response of the structure measured by the system in one scan. To identify the start and end of a half-scan period, one can refer to mirror feedback signals of a CSLDV system and determine instants when its laser spot arrives at ends of a scan line.
Application of the demodulation method for obtaining \(\tilde{\phi }_{k}\) associated with the hth mode in a half-scan period of a CSLDV system is described below. Based on Eqs. (7.15) through (7.19), a half-scan period of free response of the structure that is measured by a CSLDV system can be expressed by
The response \(\tilde{y}\left (t\right )\) is then multiplied by \(\cos \left (2\pi f_{k}t\right )\) and \(\sin \left (2\pi f_{k}t\right )\), which gives
and
respectively. A low-pass filter is then applied to \(\tilde{y}\left (t\right )\cos \left (2\pi f_{k}t\right )\) and \(\tilde{y}\left (t\right )\sin \left (2\pi f_{k}t\right )\) in Eqs. (7.21) and (7.22) to obtain \(\frac{1} {2}\tilde{\phi }_{I,k}\) and \(\frac{1} {2}\tilde{\phi }_{Q,k}\), respectively, and the second and third terms on the third lines and terms on the fourth lines of Eqs. (7.21) and (7.22) are removed. Further, \(\tilde{\phi }_{I,k}\) and \(\tilde{\phi }_{Q,k}\) can be obtained by multiplying the corresponding filtered signals by two. The value of θ h in Eq. (7.20) can be optimized so that \(\tilde{\phi }_{I,h}\) and \(\tilde{\phi }_{Q,h}\) attain their maximum and minimum amplitudes, respectively. In what follows, all FRSs are represented by their in-phase components with maximum amplitudes.
7.2.4 FRDI
A CMS Y h ′ ′ is the second-order spatial derivative of Y h , where a prime denotes first-order differentiation with respect to x. A curvature FRS \(\tilde{\phi }_{h}^{{\prime\prime}}\) can be defined as
Since Y h ′ ′ is related to the bending stiffness of a beam structure that can decrease due to occurrence of damage and regions of the decrease correspond to damage regions, it can be used for damage identification [10], and so can \(\tilde{\phi }_{h}^{{\prime\prime}}\), since it explicitly contains Y h ′ ′, as shown in Eq. (7.23).
Since a MS of an undamaged beam structure can be well approximated by that from a polynomial that fits a MS of a damaged beam structure [11], it can be inferred that a FRS of an undamaged structure can also be well approximated by that from a polynomial that fits a FRS of a damaged structure. A damage index similar to that in [11] can be defined by comparing \(\tilde{\phi }_{h}^{{\prime\prime}}\) of a damaged beam structure and that from a polynomial that fits \(\tilde{\phi }_{h}\) with a properly determined order, which can be expressed by
where N d is the number of FRSs to be included in the index, \(\tilde{\phi }_{h,i}\) is a FRS associated with the hth mode in the ith half-scan period, and \(\tilde{\phi }_{h,i}^{p}\) is a FRS from a polynomial that fits \(\tilde{\phi }_{h,i}\) with a properly determined order. The index \(\delta _{h}\left (\tilde{x}\right )\) in Eq. (7.24) is termed as a free-response damage index (FRDI) at \(\tilde{x}\). Since there can be FRSs associated with multiple modes corresponding to \(\tilde{y}\) measured by a CSLDV system in one scan, FRDIs associated with multiple modes can be obtained using measurement by a CSLDV system in one scan, and damage regions can be identified near neighborhoods with consistently high values of FRDIs associated with different modes. Note that use of δ h associated with rigid-body modes should be excluded in damage identification as curvatures of their FRSs are zero, and one should use δ h associated with elastic modes in damage identification.
7.3 Numerical Investigation
7.3.1 FRSs from Analytical and FE Models
Based on Eq. (7.1), the analytical model of an undamaged aluminum cantilever beam structure with L = 0. 8 m, E = 68. 9 GPa, m = 0. 1950 kg∕m and c = 8 × 10−7 s is formulated; the structure has a uniform square cross-section with a side length of 0. 01 m. The structure has fixed and free ends at x = 0 and x = L, respectively, and it has zero initial conditions. A single impulse with an intensity of 0. 01 N s is applied to the free end of the structure. A corresponding FE model of the structure under the same initial conditions and excitation is constructed using ABAQUS with 16,384 linear beam elements for comparison purposes, where the damping in the analytical model can be equivalently modeled using Rayleigh damping [20]. The formulation of the FE model can be expressed by
with initial conditions \(\mathbf{z}\left (0\right ) = \mathbf{0}\) and \(\dot{\mathbf{z}}\left (0\right ) = \mathbf{0}\), where M, C and K are mass, damping and stiffness matrices, respectively, in which C = α M +β K with Rayleigh damping coefficients α = 0 and β = c, i.e., C = c K, and z and f are displacement and force vectors, respectively. Mass-normalized MSs of the first four modes from the analytical and FE models compare well, as shown in Fig. 7.1.

Mass-normalized MSs of the cantilever beam structure associated with its first four modes from its analytical and FE models
Response of the beam structure is then measured by a simulated CSLDV system with a scan period of T = 2 s and a sampling frequency of 16,384 Hz; the simulated CSLDV system is capable of measuring response in the form of displacement. The position of its laser spot is shown in Fig. 7.2a; the first half-scan period starts at t = 0. 0625 s, and measured response of the structure from the analytical and FE models in the first 8 s is shown in Fig. 7.2b.

(a ) Position of the laser spot of a simulated CSLDV system on the beam structure and (b ) response from its analytical and FE models measured by the simulated CSLDV system
Based on Eq. (7.16), FRSs from the analytical model associated with the first four modes of the beam structure in the first three half-scan periods of the simulated CSLDV system are shown in Fig. 7.3a–d, respectively. FRSs from the FE model obtained by use of the simulated CSLDV system, which are obtained from the demodulation method, are shown in Fig. 7.4. It can be seen from Figs. 7.3 and 7.4 that the FRSs from the analytical and FE models are in good agreement. Amplitudes of the FRSs associated with the fourth mode of the structure in the second and third half-scan periods drastically decrease to almost zero due to the damping; the FRS in the first half-scan period is included in \(\delta _{h}\left (\tilde{x}\right )\) associated with the fourth mode for damage identification that follows.

FRSs of the beam structure from its analytical model associated with its (a ) first, (b ) second, (c ) third and (d ) fourth modes in the first three half-scan periods of the simulated CSLDV system

FRSs of the beam structure from its FE model associated with its (a ) first, (b ) second, (c ) third and (d ) fourth modes obtained by use of the simulated CSLDV system in the first three half-scan periods
7.3.2 Damage Identification Using FRDIs
Since fidelity of the FE model of the undamaged cantilever beam structure has been verified in Sect. 7.3.1, the FE model can be adapted to model such a beam structure with damage in the form of thickness reduction to numerically investigate the proposed damage identification methodology. The thickness of the section of the structure between \(x = \frac{6} {16}L\) and \(x = \frac{7} {16}L\) is reduced by 10%, while its E and volume mass density remain unchanged. Response of the damaged structure from its FE model is measured by the simulated CSLDV system with the same settings as those in Sect. 7.3.1, and it is used to obtain FRSs of the damaged structure associated with the first four modes in the first three half-scan periods, as shown in Fig. 7.5.

FRSs from the FE model of the damaged beam structure obtained by use of the simulated CSLDV system associated with the (a ) first, (b ) second, (c ) third and (d ) fourth modes in the first three half-scan periods
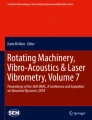
FRDIs associated with the first through fourth modes are shown in Fig. 7.6a–d, respectively. Note that numbers of FRSs included in the FRDIs associated with the first through fourth modes are 3, 3, 3 and 1, respectively. The damage can be clearly identified near neighborhoods with consistently high values of the FRDIs.

FRDIs associated with the (a ) first, (b ) second, (c ) third and (d ) fourth modes of the damaged beam structure. Locations of damage ends are indicated by two vertical dashed lines
7.4 Conclusion
A new type of vibration shapes called a FRS is introduced in this work. A FRS can be obtained by use of a CSLDV system, and it can be obtained from the demodulation method using free response of a structure. An analytical expression of a FRS is derived for a beam structure with damping that can be modeled by Kelvin-Voigt viscoelastic model. FRSs from the analytical expression compare well with those from a FE model. A FRDI that uses differences between curvatures of FRSs associated with a mode and those from polynomial fits is proposed, and damage regions can be accurately identified near neighborhoods with consistently high values of FRDIs associated with different modes. It is numerically shown that amplitudes of FRSs decrease from one half-scan period to the next. The proposed methodology was numerically applied to a damaged beam structure with thickness reductions along their lengths. The damage region is successfully identified near neighborhoods with consistently high values of FRDIs associated with different modes.
References
Fan, W., Qiao, P.: Vibration-based damage identification methods: a review and comparative study. Struct. Health Monit. 10 (1), 83–111 (2011)
Ewins, D.J.: Modal Testing: Theory, Practice and Application, 2nd edn. Research Studies Press, Hertfordshire (2000)
Wong, C.N., Zhu, W.D., Xu, G.Y.: On an iterative general-order perturbation method for multiple structural damage detection. J. Sound Vib. 273 (1), 363–386 (2004)
Xu, G.Y., Zhu, W.D., Emory, B.H.: Experimental and numerical investigation of structural damage detection using changes in natural frequencies. J. Vib. Acoust. 129 (6), 686–700 (2007)
He, K., Zhu, W.D.: Detection of damage and loosening of bolted connections in structures using changes in natural frequencies. ASNT Mater. Eval. 68 (6), 721–732 (2010)
He, K., Zhu, W.D.: Vibration-based structural damage detection method and its applications to engineering structures. Int. J. Smart Nano Mater. 2 (3), 194–218 (2011)
Zhu, W.D., He, K.: Detection of damage in space frame structures with l-shaped beams and bolted joints using changes in natural frequencies. J. Vib. Acoust. 135 (5), 051001 (2013)
He, K., Zhu, W.D.: Detecting loosening of bolted connections in a pipeline using changes in natural frequencies. J. Vib. Acoust. 136 (3), 034503 (2014)
Surace, C., Archibald, R., Saxena, R.: On the use of the polynomial annihilation edge detection for locating cracks in beam-like structures. Comput. Struct. 114, 72–83 (2013)
Pandey, A.K., Biswas, M., Samman, M.M.: Damage detection from changes in curvature mode shapes. J. Sound Vib. 145 (2), 321–332 (1991)
Xu, Y.F., Zhu, W.D., Liu, J., Shao, Y.M.: Identification of embedded horizontal cracks in beams using measured mode shapes. J. Sound Vib. 333 (23), 6273–6294 (2014)
Rothberg, S., Baker, J., Halliwell, N.A.: Laser vibrometry: pseudo-vibrations. J. Sound Vib. 135 (3), 516–522 (1989)
Sriram, P., Hanagud, S., Craig, J., Komerath, N.: Scanning laser doppler technique for velocity profile sensing on a moving surface. Appl. Opt. 29 (16), 2409–2417 (1990)
Sriram, P., Hanagud, S., Craig, J.: Mode shape measurement using a scanning laser doppler vibrometer. J. Anal. Exp. Modal. Anal. 7 (3), 169–178 (1992)
Stanbridge, A., Ewins, D.: Using a continuously-scanning laser doppler vibrometer for modal testing. In: Proceedings of the International Modal Analysis Conference, pp. 816–822 (1996)
Stanbridge, A., Ewins, D.: Modal testing using a scanning laser doppler vibrometer. Mech. Syst. Signal Process. 13 (2), 255–270 (1999)
Allen, M.S., Sracic, M.W.: A new method for processing impact excited continuous-scan laser doppler vibrometer measurements. Mech. Syst. Signal Process. 24 (3), 721–735 (2010)
Khan, A., Stanbridge, A.B., Ewins, D.J.: Detecting damage in vibrating structures with a scanning LDV. Opt. Lasers Eng. 32 (6), 583–592 (1999)
Chen, D.-M., Xu, Y.F., Zhu, W.D.: Damage identification of beams using a continuous scanning laser doppler vibrometer system. J. Vib. Acoust. 138 (5), 051011 (2016)
Meirovitch, L.: Principles and Techniques of Vibrations. Prentice Hall, Englewood Cliffs (1997)
Caughey, T.K., O’kelly, M.E.J..: Classical normal modes in damped linear dynamic systems. J. Appl. Mech. 32 (3), 583–588 (1965)
Rao, S.S.: Mechanical Vibrations, 4th edn. Pearson Prentice Hall, Upper Saddle River (2004)
Acknowledgements
The authors are grateful for the financial support from the National Science Foundation under Grant Numbers CMMI-1229532 and CMMI-1335024.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Xu, Y.F., Chen, DM., Zhu, W.D. (2017). Structural Damage Identification Using Free Response Measured by a Continuously Scanning Laser Doppler Vibrometer System. In: Di Maio, D., Castellini, P. (eds) Rotating Machinery, Hybrid Test Methods, Vibro-Acoustics & Laser Vibrometry, Volume 8. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-54648-3_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-54648-3_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-54647-6
Online ISBN: 978-3-319-54648-3
eBook Packages: EngineeringEngineering (R0)