
Abstract
Especially in the light of innovative aircraft configurations with sweptback and delta wings, and without tail planes (tailless aircraft), that encountered compressibility effects in the transonic range, the question was raised, what kind of flying qualities can be expected of such an aircraft and how can they be improved, if the need arises. The pilot judgments were here especially called for, which demanded progressively new standards for the flying qualities guidelines. To generate the databases necessary for this, aircraft were needed whose stability properties could be varied through structural or flight control measures in a such way that a wide spectrum of flying qualities, as optimal as possible, could be evaluated for different flight tasks such as takeoff and landing or target tracking.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.

5.1 Introduction
Especially in the light of innovative aircraft configurations with sweptback and delta wings, and without tail planes (tailless aircraft), that encountered compressibility effects in the transonic range, the question was raised, what kind of flying qualities can be expected of such an aircraft and how can they be improved, if the need arises. The pilot judgments were here especially called for, which demanded progressively new standards for the flying qualities guidelines. To generate the databases necessary for this, aircraft were needed whose stability properties could be varied through structural or flight control measures in a such way that a wide spectrum of flying qualities, as optimal as possible, could be evaluated for different flight tasks such as takeoff and landing or target tracking.
The aeronautical research in the United States of America started to deal increasingly with the problem of inadequate flying qualities of high performance aircraft in the mid nineteen forties. Although pioneering work in Germany during the Second World War preceded the work in the United States (see Chap. 4), it was the US National Advisory Committee for Aeronautics NACA at the Ames Research Center (today NASA) and the Cornell Aeronautical Laboratory (CAL, today: Calspan Corporation) in Buffalo [1, 2], who, independent of each other, converted the worldwide first two aircraft to experimental demonstrators with variable stability characteristics, and thereby took the leading role in this special field of aeronautical research.
Still, there was a fundamental difference in the objectives of the early work at NACA and at CAL in the beginnings. In order to gather some more background information about these early days, it was a unique opportunity to ask a contemporary witness, a leading scientist at Cornell Aeronautical Laboratory at that time, Irving C. Statler, a former Director of the US Army Aeroflightdynamics Directorate and of the Advisory Board of Aerospace Research and Development (AGARD) of NATO, to illuminate on these beginnings from today’s perspective.
To quote Statler:
When I joined the Cornell Aeronautical Laboratory (CAL) Flight Research Department in 1946, I was fortunate to become a part of a team that left a lasting legacy of understanding of aircraft stability and control. Most of the failures of the earliest attempts at powered, fixed-wing flight were associated with inadequate understanding of dynamic stability and control. The exploratory work at CAL during 1946–1947 turned out to be the genesis of the “variable-stability” aircraft and led to the development of inflight simulation. The histories of the accomplishments at CAL have focused on the activities directly associated with in-flight simulation for which CAL is best known and have not adequately addressed its origins.
In 1946, the Flight Research Department at CAL was trying to find a reliable way to measure the flying qualities (that is, the dynamic stability and control characteristics) of an aircraft in flight. Bill Milliken and Ira Ross, who headed the Flight Research Department, believed that the key to understanding the dynamic stability of an aircraft and its controllability resided within the classical equations of motion. While Bill and Ira deserve full credit for having thought of this approach, the subsequent successful demonstration of the viability of the idea relied on the capabilities of the entire team, including, in particular, the analytical expertise of Walt Breuhaus, Dave Whitcomb, and Ed Laitone and the piloting skills of John Seal, Nello Infanti, Giff Bull, and Leif Larson.
Ed Laitone and I developed the mathematics and the analytical techniques that were the foundations for the concept of measuring dynamic behavior in flight. We showed that the coefficients of the equation representing longitudinal motions of an aircraft could be identified with the stability derivatives that defined the longitudinal, fixed-control, short-period flying qualities of the airplane. The dynamics of aircraft motion could be expressed from the perspective of the frequency spectra of the responses to controlled inputs. Although the method was well known in analyses of other mechanical and electrical systems, this was the first time it was used to achieve understanding of aircraft dynamics.
The U.S. Army Air Forces loaned CAL a B-25J bomber for the experiment that would demonstrate a way to measure dynamic stability characteristics in flight for the first time based on the mathematical analysis. The challenge was to develop a way to produce and measure precise control inputs and measure aircraft responses in flight. We tried having our test pilot put in sinusoidal elevator control, but that did not work. Honeywell donated to us an autopilot, which we modified to produce precise sinusoidal elevator motions over a range of frequencies and amplitudes.

Air Force pilot Captain Glen Edwards (for whom the Edwards Air Force Base was later to be named) and Bill Milliken flew the first experimental flights with the B-25J using the modified autopilot to produce sinusoidal elevator motions. The aircraft responses in pitch angle, normal acceleration, and control forces to the elevator inputs were recorded on an oscillograph that were transcribed manually after each flight. The B-25J tests demonstrated that the mathematical representation agreed with the physical facts and maintained over a large range of control-input frequencies. For the first time, the frequency spectra of responses to control inputs were obtained in flight and used to measure an aircraft’s dynamic stability characteristics and maneuvering behavior. This was not yet a variable stability simulation, but it is where it started.
After we demonstrated that in-flight measurements of flying qualities could be done with reliability and repeatability, the question it raised was, ‘What flying qualities does the pilot prefer?’ In order to obtain information of pilots’ opinions on what constituted good or bad flying qualities, we needed to be able to change the flying characteristics of the airplane in flight. Ed Laitone and I showed that, when control motions were made proportional to aircraft displacements, velocities, or accelerations, it was mathematically equivalent to changing the stability derivatives that determined the flying qualities (I do not claim that this idea originated with us, but demonstrating its plausibility from the equations of motion was. In fact, Hamel has described the research of Heinkel and Fischel of using artificial stability in advanced aircraft already in 1940).
The success of the experiment with the B-25J was the beginning of the developments that evolved into the innovative concepts of enhanced stability augmentation and design specifications for handling qualities. This was the genesis of the “variable-stability” aircraft, which led to the development of in-flight simulation at CAL.
During about the same time, NACA also discovered the concept of the variable stability aircraft, but they arrived by way of solving particular stability and control problems of specific aircraft using augmented stability.
The methodologies for automatic manipulation of the flight controls in response to selected airplane motions were used by CAL to explore “handling qualities” while NACA used them to solve unacceptable flying qualities. These methodologies enabled development of variable stability simulation and in-flight simulation. However, more importantly, they laid the groundwork for the current use of automatic control to stabilize inherently unstable aircraft designs, to control stall and ride comfort, and to achieve prescribed operational capabilities. Artificial stability freed designers forevermore from the constraints of the classical approach that relied on aerodynamic means alone to achieve satisfactory dynamic stability and control using fixed stabilizing fins and manually movable surfaces for control.

As already pointed in Chap. 1, recollect that in this book the name Calspan (CAL) will be used for all references to the company though most of the pioneering was done when the organization was still the Cornell Aeronautical Laboratory (CAL). Correspondingly, the name NASA will be used for references to the organization though much of the work was performed when the agency still was called NACA.
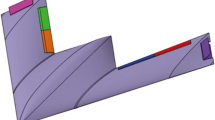
NASA modified the aileron control function of a Grumman F6F-3 in such a way that different dihedral positions of wings could be simulated electronically (see Fig. 5.1). For the US Navy, Calspan fitted a Vought F4U-5 with an additional rudder, which was operated by servo control, independent of the manual actuation (see Fig. 5.2). The aim was to determine the optimum requirements for Dutch roll damping mode during landing approaches to an aircraft carrier. Both aircraft were single seated and in the case of a controller failure had to be switched to the basic (manual) control system by the pilot. This safety risk was later eliminated through the use of two-seater test aircraft with a so-called “Safety Pilot”, who could take over the control of the aircraft in the case of an emergency, while the test or evaluation pilot focused fully on the experiment.

Grumman F6F-3 VS

Vought F4U-5 (1948)
In the following decades, a variety of variable stability aircraft emerged at Calspan and NASA, whose flying qualities could be deliberately changed through autopilots and other flight controllers with limited control authority. With this, it was possible to change and to investigate the flying qualities in a systematic way, rather than relying on the results from flight tests with different types of aircraft. Quite soon variable stability measures were not sufficient enough to cover the spectrum of new aircraft configurations. The desire to predict the flying qualities of new types of aircraft was becoming increasingly obvious. Although analytical methods were meanwhile well developed, and also high-fidelity ground-based simulators became available, only flight testing provided the opportunity to carry out experiments and evaluations under realistic visual and motion cues. Consequently, the research aircraft were externally modified, for example, by additional control surfaces for generating lift, drag, and lateral forces, with which the new types of aircraft could be simulated in flight in all modes of motion with unlimited control authority. Special high-performance computers, initially analog and later digital in compact form, took over the task of emulating in real time the flight characteristics of the aircraft being simulated during actual flight. All these research aircraft, in conjunction with highly qualified test pilots, provided a solid base for the development of new flying qualities criteria and for the genesis of computer-controlled flight control systems known as Fly-by-Wire that would make it easier and safer to fly. With increasing control authority Fly-by-Wire systems would finally revolutionize the aircraft design process (see Chap. 6).
In the following, a relatively complete compendium is provided on the most important variable stability aircraft or in-flight simulators which emerged worldwide during the past six decades. Included are also some examples throughout this section that are not really representative of variable stability research aircraft and in-flight simulators, but these vehicles use augmented (or artificial) stability to solve particular dynamic problems. For example, review the following Sects. 5.2.1.6 EF-86E, 5.2.2.6 F9F-2, 5.2.3.1 XF-88A and 5.2.3.2 NF-104A.
From the successive sections, it becomes obvious which outstanding role Calspan (CAL) and NASA have played in the development and use of variable stability aircraft and in-flight simulators. In addition to extensive archives of the editor of this book and DLR as well as published technical literature, the attention is directed to the survey reports of Breuhaus [3] and the proceedings of the first International Symposium on in-flight simulation held in Braunschweig [4]. Also, three historic documentations about the important role of the NASA variable stability aircraft and in-flight simulators should be referred to as supplementary Refs. [5,6,7].
Subsequently, the unique European research expertise in the field of in-flight simulation of the German Aerospace Center (DLR) at the Braunschweig Research Airport will then be highlighted in separate Chaps. 7, 8, 9 and 10.
5.2 USA
5.2.1 CAL/Calspan
5.2.1.1 Vought F4U-5 VS (1948–1952)
The Sperry A-12 Autopilot of Vought F4U-5 aircraft was so modified that with the aid of a separated lower part of the rudder (damping rudder, Figs. 5.2 and 5.3) the lateral stability, that is, the directional stability and yaw damping, could deliberately be manipulated through feedback of sideslip angle and yaw rate. Through this superimposition, the yaw damping was artificially increased. In further studies it could be demonstrated that a nonlinear feedback controller leads to even better results for precision maneuvers. Such a nonlinear controller concept was also flown successfully by Calspan on a EF-86E (see Sect. 5.2.1.6).

F4U-5 split rudder
In addition, the outer part of the landing flaps was replaced by separately controllable flaps, with which independent of the standard, hand-operated ailerons the roll and yaw dynamics could be artificially influenced through the superimposition of measured roll and yaw rates and angles of sideslip. Thereby for the first time, new lateral-directional flying qualities guidelines could be formulated for the US Navy through the evaluation of pilot assessments. The flight test program comprised of 160 flight hours.
5.2.1.2 Fairchild PT-26 (1948–1950)
As part of a research program on the stall and stability behavior of aircraft at higher angles of attack, a Fairchild PT-26 was equipped with the components of a production-version of a Sperry A-12 autopilot to stabilize the roll and yaw motion. An angle of attack vane was mounted on a long vertical boom just behind the cockpit. Other horizontal sensor booms for the measurement lateral motion data were mounted near the right and left wing tips (see Fig. 5.4). The autopilot was modified such that the roll attitude, as well as roll and yaw rates, could be fed back via pilot adjustable gains to the rudder and ailerons. In this way, steady and stable flight conditions were flown in the longitudinal mode with angles of attack up to α = 28°, with fully separated flow well exceeding the condition of maximum lift at α = 15° (post stall flight regime). In this context, it is interesting to note that such investigations on the stability behavior of an aircraft with fully separated flow acquired special significance fifty years later (see Sect. 6.3.6).

Fairchild PT-26 with vertical boom
5.2.1.3 Beechcraft C-45F (1951–1953)
The aim of this USAF research program was to alter the flight dynamics of the aircraft by artificial stabilization of the pitch, roll, and yaw axes. To this end, variably adjustable signals of yaw rate, angle of sideslip and its rate of change, as well as yaw accelerations were fed to the hydraulic servo for rudder. Yaw rate and roll accelerations were applied to the servos for ailerons. The longitudinal acceleration signal was fed back to the elevator servo. Artificial control force feelings could be generated with continuously variable force gradients. With this Beechcraft C-45F, modified as described here, variable stability characteristics in the three primary control axes, that in pitching, rolling and yawing, were realized for the first time (see Fig. 5.5). Whereas for the in-flight simulation the control inceptors were mechanically disconnected from the control surfaces for the test pilots on the left-hand side, the control inceptors of the safety pilot in the right-hand seat remained permanently connected mechanically with the control surfaces. Other important contributions of this research program on in-flight simulation were the targeted development of electro-hydraulic actuation systems for activation of the aerodynamic control surfaces, and the introduction of the safety pilot concept with instantaneous access to the basic mechanical control system. Before the flight test program could be completed, the test demonstrator crashed during a routine landing.

Beechcraft C-45F
5.2.1.4 Douglas JTB-26B (1951–1957)
In the early nineteen fifties, the analytical studies at Calspan pointed out that for flight speeds near the speed of sound (transonic range) and in the supersonic range, the flying qualities in the longitudinal mode deteriorate rapidly. The damping values of the short period mode converged to zero, and thereby the danger potential, called pilot-induced oscillations, increased accordingly. As such, flight test data were needed in this flight regime to adopt the guidelines for acceptable flying qualities in the longitudinal motion for both flight modes, namely short period and Phugoid. For this purpose, at the behest of the USAF, Calspan converted a Douglas JTB-26B (see Fig. 5.6), and almost simultaneously a two-seater F-94A (see Sect. 5.2.1.5), with a single-axis controller to generate variable longitudinal flying qualities. With both these testing platforms a variety of frequency-dependent flight test data was acquired, which led to definition of a new, worldwide utilized flying qualities criterion. The numerical range of this so-called Control Anticipation Parameter—CAP provides evidence of good or poor responsiveness of an aircraft in the longitudinal mode due to elevator step inputs.

Douglas JTB-26B
From 1952, for the JTB-26B provided by the USAF a variable stability system was developed, which exclusively drove the elevator; in other words, the aircraft pitch response behavior could be artificially varied or modified. In the two-man cockpit, for the evaluation pilots on the right side the, pitch stick was disconnected from the mechanical basic system and replaced with an adjustable one with artificial control forces (Artificial Feel). The pitch stick control for the safety pilot on the left-hand side remained unchanged. Calspan engineers had devised a special feature specifically for the investigation of the Phugoid dynamics. Two small auxiliary control surfaces on the aft fuselage cone (see Fig. 5.7) were applied with freely adjustable signals of airspeed and longitudinal acceleration and thereby the normally weakly damped Phugoid dynamics could be artificially influenced, that is, damped. With this small variation, the pilot work load in landing approach on a predetermined trajectory, for example, ILS approaches, could be significantly reduced. Many reproducible pilot assessments were gathered up to 1957 for different combinations of frequencies and damping of the short period mode. This data base formed the basis for the first viable flying qualities guidelines USAF (MIL-Specs. 8785B).

JTB-26B auxiliary rudder surfaces
By the end of 1958, the USAF research subsidies for flying qualities investigations drained. The USAF handed over the JTB-26 along with two further standard B-26B (see Sect. 5.2.1.9) to Calspan for further utilization.
5.2.1.5 Lockheed EF-94A (1952–1958)
Besides JTB-26 B, practically at the same time, at the behest of the USAF, Calspan converted a two-seater Lockheed F-94A to a single-axis elevator control system for generating variable flying qualities in the longitudinal mode (see Fig. 5.8). To prepare it as a Variable Stability Aircraft, the basic control system for the front seat evaluation pilot was mechanically disconnected and an electronic elevator control system introduced. On the other hand, for the safety pilot in the rear seat controls neither for rudder nor brake pedals were provided, with the result that he could not carry out takeoffs or landings. The objective of the program was to determine optimal flying qualities criteria for the longitudinal motion. The EF-94A, besides the B-367–80 (see Sect. 5.2.2.13), contributed to the emergence of the so-called. C*-flight control law, which was adopted in a modified form later in the flight control laws of the new generation of Fly-by-Wire commercial aircraft such as Airbus A-320/330/340/350/380-family and Boeing B-777/787 series. It was also used for simulation of specific aircraft projects before the first flight. These included the simulation and optimization of the longitudinal control law of the supersonic aircraft Convair XB-58 (Convair test pilot B. A. Eriksen: “The EF-94A represented the XB-58 like meeting an old friend”). The EF-94A was later replaced by the NT-33A with an F-94 radome to allow sufficient mounting space for analog computer systems and flight data recordings.

Lockheed F-94A
5.2.1.6 North American EF-86E (1953–1955)
It is worth noting that the system changes of the serial F-86E over the previous version of F-86A were significant steps towards progressive flight control augmentation. Thus, at the behest of the USAF, Calspan introduced a hydraulic aileron and elevator control system with artificial control force feeling, whereby the aerodynamic forces could no longer act directly on the control inceptors. The decisive change in the control system concerned the pitch control; the marginally effective elevator was now replaced by an electro-hydraulically adjustable horizontal tailplane. With this so-called All-Flying Tail the control problems due to local shock waves at higher subsonic speeds could be avoided. In contrast, the rudder was still operated by rods and cables, and as such hardly suitable for damping the typical swept-wing aircraft snaking oscillations around the yaw axis.
After the initial very promising investigations with a Vought F4U-5, Calspan extended the investigations to artificial stabilization of the yaw axis (yaw damping) on one of the EF-86E provided by the USAF (USAF Register Number (R/N) 50-588, see Fig. 5.9). To realize a nonlinear yaw damper, a servo-actuator was mounted on the fin, which steered an auxiliary tab of the rudder. The additional control movements were felt by the pilots on the pedals. Through these changes the aeroelastic stability properties of rudder changed to such an extent that, after initial flights, it led to fracture and loss of the rudder. Through skillful pilot intervention the EF-86E could be brought to emergency landing and thereby a total loss could be prevented.

North American EF-86E (AF50-588)
After the integration of a now irreversible electro-hydraulic rudder control system with artificial feel, the control signals of the pilots and of the yaw damper were directly fed to the rudder-surface. In doing so the sensitivity of the yaw damper (gain) was revoked with increasing sideslip angles. During the subsequent flight tests the high effectiveness of the nonlinear yaw damper was demonstrated [8].
“I lost my Tail”
To improve the EF-86E lateral flying qualities CAL (Calspan) proposed to design a nonlinear automated control system that would make the aircraft feel very stiff to the pilot for small directional motions and make it responsive and agile for large yawing velocities. I was given the task of designing this nonlinear yaw-control system for the EF-86E. 
I learned from analog computer simulations that it would be necessary for the control system to operate the rudder at fairly high frequencies on occasion. However, the small servomotor that would fit inside the vertical tail to drive the rudder would not have sufficient power, so we had to devise something to balance the inertia of the rudder. We attached two arms to the front edge of the rudder extending ahead of the hinge line that held counterbalancing weights at the forward end of the arms. The weights had to be as small as possible and yet heavy enough to balance the weight of the rudder with the minimum length of the arms.
We pursued the initial flight tests cautiously by very gradually increasing the maneuvers. John would perform a scheduled test, then circle while we checked the data and gave him approval to proceed with the next test. One day, I was in the radio room as usual and gave John the go-ahead for the next test. Then we heard John say in a very calm voice “I think I just lost my tail.” We held our breaths until we heard him say “I have it under control”. We notified Buffalo Airport, they declared an emergency, and sent the fire trucks out, but Johnny made a nice normal landing and taxied the aircraft to the Flight Research Hangar. He had not lost the vertical tail, but he had lost the entire rudder including the counterbalancing arms and weights. Subsequently, pieces were reported found scattered over a large area of Williamsville. The public uproar plus the estimated cost of the repairs to the airplane were sufficient to bring my first (and last) flight-test project to an end [9].
Irving C. Statler
5.2.1.7 Lockheed NT-33A (1957–1997)
As the first experiences of simulating in flight the longitudinal motion before the first flight of the Convair B-58 Hustler with the NF-94A (see Sect. 5.2.1.5) were being gathered, soon thereafter a Lockheed T-33 was made available by the USAF, that was now modified in the three primary axes (pitch, roll, and yaw axes) to a system with variable stability and controllability (see Fig. 5.10). It was named NT-33A (the N implying non-removable equipment). Since the analog simulation equipment using computer with vacuum tubes could not be accommodated in the original T-33 fuselage, the T-33 fuselage nose was replaced through the bulky radome of the EF-94A (see Fig. 5.11). The first lucid description of the NT-33A including the underlying flight test philosophy followed in the year 1961 [10].

Lockheed NT-33A

NT-33A with EF-94A nose
For the simulation of steep descent of the X-15 hypersonic aircraft, compared to X-15 the low drag aerodynamics of NT-33A had to be degraded sufficiently. Thereto, airbrakes mounted on the wingtip tanks were extended from time to time as variable drag generators (Drag Petals, see Fig. 5.12). That was, anyhow, a better solution than the triggering of a drogue in flight, as was initially tried with a North American F-100A. In addition, the front seat of the NT-33A was adapted to the cockpit of the X-15, whereby Calspan installed control sticks of the X-15 (see Figs. 5.13 and 5.14) on both sides, right for simulated reaction control (Ballistic Control) and left for the aerodynamic control in the atmosphere (Aero Control) during 60 s under zero-gravity. The ballistic control did not cause any aircraft reactions, but simulated only changes in the pitch attitude on the display. In the rear seat, the safety pilot had access to the basic mechanical flight control system of the NT-33A. The constantly changing flying qualities of the X-15 during the re-entry into the atmosphere were simulated through a programmable nonlinear function generator, which varied the gains of 32 measured state variables as well as flight control parameters of the flight controller. In May 1960, began the re-entry training and evaluation flights for the selected few X-15 test pilots, including Neil Armstrong. Soon he had prepared a remarkably foresighted documentation on the role and experience of in-flight simulation for the application domain of manned spacecraft [11].

NT-33A during X-15 steep approach simulation

X-15 (right sidestick Ballistic Control)

X-15 (left sidestick Aero Control)
“Here’s your Stick”
During one of the flights, with Neil Armstrong in the front seat, we were simulating failed dampers at something like Mach 3.2 and 100,000 feet altitude. Neil had great difficulty with this simulated undamped X-15 configuration and lost control of the airplane repeatedly. The safety pilot “Nello” Infanti had to recover from each one of these “lost-control” events using the controls in the back cockpit. Infanti later recalled that some of these recoveries were “pretty sporty”. The ground crew was monitoring the test radio frequency as usual and followed these simulated flight control problems with great interest.
After landing, the NT-33A taxied to the ramp and Howard Stevens attached the ladder to the cockpits and climbed up to and talk to Infanti about the airplane status. I climbed up the ladderfront side to talk to Neil. He handed me his helmet knee-pad, got down from the cockpit and we talked about the flight and walked toward the operations building. As we arrived at the door Armstrong extended his right hand to grasp the door handle–but his hand still held the sidestick that he had broken during his last battle with the X-15 dampers-off simulation. I was unaware of any report of this incident during the flight and had not noticed the stick in Armstrong’s hand when he exited the cockpit. Addressing the matter for the first time, Armstrong said–without additional comment—“Here’s your stick!”
It developed that Infanti had been aware of the broken sidestick after it happened because Neil had held it up over his head in the front cockpit for Nello to see. After the debriefing, we took the broken sidestick to the NASA workshop where Neil found the necessary metal tubing and repaired the stick while I mostly watched him work. The sidestick was reinstalled and ready for the first flight the next morning. Really good test pilots fix what they break!
Jack Beilman, Calspan 
The NT-33A became one of the most successful in-flight simulators worldwide. Over a period of 40 years, in addition to the X-15 project support and the simulation of reentry flight vehicles such as M2F2 and X-24A, primary data were flown with NT-33A for the USAF flying qualities requirements for highly control augmented aircraft (MIL-F-8785 and MILSTD-1797). Further, national aircraft projects such as A-9, A-10, F-15, F-16, F-17, F-18, F-117 and F-22, as well as international projects like TSR.2 (England), Lavi (Israel), JAS Gripen (Sweden) and LCA (India), were tested and evaluated before their respective first flights. Also, during the nineteen eighties, joint research programs were pursued with the DLR (see Sect. 12.3.2).
A total of 5200 flights accumulating 8000 flying hours were flown with the NT-33A at Calspan. A significant portion of flight hours were spent on the test pilot training at the Edwards Air Force Base (AFTPS). Robert Harper, the co-founder of the world famous Cooper-Harper flying qualities rating scale (Pilot Rating Scale, see Fig. 2.6) had, on behalf of Calspan, played a key role in structuring various flying qualities test programs for the AFTPS. In the year 1997, the NT-33A was handed over to the Air Force Museum at the Wright-Patterson AFB in Dayton, Ohio, as an exhibit with special merits.
5.2.1.8 Chance Vought F7U-3 (1958–1959)
Through the integration of two vertical “canard” control surfaces, above and below the fuselage nose of a Chance Vought F7U-3, carried out by Calspan at the behest of the US Navy, it became possible to stabilize the lateral-directional motion at high angles of attack, that is under separated flow conditions (Post-Stall flight envelope). With this unusual configuration sufficiently rapid yaw damping moments could be generated, which effectively prevented an uncontrolled buildup of critical lateral-directional flight conditions (Post-Stall Gyrations). The signal of the rate of change of angle of sideslip (beta-rate) was used in the controller feedback (see Fig. 5.15).

F7U-3 with additional control surfaces
5.2.1.9 Douglas TB-26B (1959–1981)
After Calspan had demonstrated to the US Naval Test Pilot School (NTPS, Patuxent River, MD) the specific utilization potentials of Douglas JTB-26B (see Sect. 5.2.1.4) with variable flying qualities in the longitudinal motion, a special training program was worked out in 1960 for future flight test pilots. As a result, in addition to the theoretical knowledge of flying qualities evaluation, the test pilots could follow for the first time the practical demonstration in flight tests. As a consequence of the wide acceptance of these pilot trainings, the US Air Force Test Pilot School (AFTPS, Edwards AFB, CA) also introduced these training courses with the Douglas B-26B three years later. Due to the heavy demand, two of three B-26B aircraft loaned to Calspan by the US Air Force were converted in 1963 to TB-26B aircraft with variable stability characteristics in all three principal axes (3 degrees of freedom: pitch, roll, yaw). Finally, in the mid-1960s, the two engines could be driven with the aid of servo controls (closed loop throttle servo), and thus 4 degrees of freedom were at disposal for the first time for the in-flight simulation of a supersonic aircraft.
The two TB-26B (R/N N9146H and N9417H) were utilized for research and training programs till the late nineteen seventies (see Figs. 5.16 and 5.17). The third B-26 was used in this period as “spare parts storehouse”. One of them was lost in spring 1981 at the US Edwards Air Force Base due to a wing-fatigue fracture, the other is in the Air Museum of Edwards Air Force Base. They were successively replaced through timely procured and converted Calspan Gates Learjet Model 24 VS (see Sect. 5.2.1.13).

Douglas TB-26B N9146H

Douglas TB-26B N9417H
5.2.1.10 Convair NC-131H TIFS (1970–2011)
In addition to the aforementioned NT-33A, another in-flight simulator has played a particularly prominent role in the transport aircraft sector. On a former US Air Force C-131B transport aircraft (civil: Convair 340, built in 1955) extensive modifications were undertaken by Calspan during the late 60s (see Fig. 5.18). The original piston engines were replaced through propeller turbines with double the engine power. More striking conversions included the integration of vertical control surfaces for side force control on the wings and the attachment of an additional simulation cockpit (duplex cockpit) on the fuselage nose (see Fig. 5.19). Through installation of a comprehensive system to produce variable flying qualities, additional electronically controllable direct lift control (DLC) surfaces and a servo-controlled engine throttle control, an in-flight simulator was developed for the first time worldwide that permitted the manipulation of the aircraft dynamics in all the six degrees of freedom (3 rotational degrees of freedom: pitch, roll and yaw; 3 translational degrees of freedom: vertical, horizontal and lateral). Accordingly, the test aircraft was called TIFS (Total In-Flight Simulator) and due to the constructive changes carried out on a permanent basis, it was registered as NC-131H (civil: Convair 580) in the Air Force.

NC-131H TIFS

TIFS duplex cockpit (USAF)
The side-by-side seat duplex cockpit with an excellent exterior view, programmable displays, and replaceable or reconfigurable control inceptors with artificial force feel (see Fig. 5.19) was occupied by the test and evaluation pilots during flight experiments, whereby the flight safety was monitored by the safety pilot sitting left in the actual cockpit. He could turn off the simulation system and take over the command in the case of emergencies.
At Calspan (Ed Rynaski) the so-called Explicit Model Following Control principle was used on the TIFS for the first time, in contrast to the previously applied classical feedback control, also called Implicit Model Following Control (Response Feedback), see Sect. 3.3.
Not so well known is the second TIFS configuration (TIFS II), which was in a semi-finished stage, during the nineteen-seventies at the company Aerospace Lines (R/N N21466) with side force generators and a Boeing B707 nose, which was to be exclusively converted by Calspn for commercial applications and offered to NASA for utilization (see Fig. 5.20). This program was, however, cancelled due to cost reasons.

Convair 580 TIFS II with civilian registration number and Boeing 707 nose (Credit Peter de Groot)
TIFS made its maiden flight in June 1970. The first full in-flight simulation took place on 10th June 1971 for the Rockwell B-1A project. Since then in the following 32 years continuous improvements were carried out to the simulation and cockpit systems, such as migration from “egg timer” to flat panel displays up to artificial view (Synthetic Vision), from analog computer components to compact and flexible digital computer components, and control columns (Wheels) to programmable sidesticks. Numerous utilization programs were flown, and aircraft projects such as X-29, X-40, B-2, YF 23, C-5 and C-17 as well as civil projects like Boeing 7J7 (later Boeing B-777 “Triple Seven”), MD-12X, SST (Supersonic Transport) were simulated in flight with the NC-131H before their respective actual first flight. Likewise, as in the British-French supersonic aircraft Concorde, flanking support programs were flown.
Based on a transatlantic cooperation program (MoU) between the USAF and the DFVLR (now: DLR, see Sect. 12.3.2), DLR test pilot Hans-Ludwig (“HaLu”) Meyer could participate in the flight test program to evaluate the flying qualities of a very large aircraft. An interesting outcome was the comparison of the control strategies of DFVLR pilot with an Air Force pilot. While the USAF pilot tried with larger, high-frequency control activity to compensate for any smallest trajectory deviation, HaLu reached practically the same result with much quieter, low-frequency control inputs. The comparison was then interpreted informally as the mental difference between a Texan cowboy and a “cool” North German sailor.
In addition to the test pilot training for the Air Force Test Pilot School (AFTPS), TIFS served in a very special way the development and testing of flight control laws for the unpowered landing of the Space Shuttle. As in the case of the NT-33A, it was necessary here to generate additional aerodynamic drag for simulation of steep descents of up to 15° glide path angle. This was achieved on TIFS by deflecting the lateral force control surfaces in opposite directions.
On 17th November 2008, a piece of US aviation history was concluded. After more than 40 years and 2500 research flights, TIFS landed for the last time at the Wright-Patterson Air Force Base in Ohio (see Figs. 5.21 and 5.22). Thereafter, it received a special place of honor at the National Museum of the United States Air Force.

TIFS last flight on 7th November 2008 (Credit USAF)

TIFS USAF team after the last flight (Credit USAF)
5.2.1.11 Bell X-22A VS (1971–1984)
The unusual Bell X-22A configuration is till today the only short and vertical take-off (V/STOL) aircraft, that was in the nineteen sixties already in development phase conceptualized as a flight test demonstrator with variable stability capabilities. The propulsion concept consisted of two pairs, one behind the other, encapsulated 2.1 m propeller devices (dual tandem tilting ducted fans), which were driven by four turboshaft engines in the rear stub wings. A total of 10 transmission units had to be integrated, to ensure safe flight even with an engine failure. The engine propeller encased in ducts could be tilted through 90° by hydraulic actuation systems for the transition from vertical takeoff to horizontal flight. All flight control and stabilization tasks, such as attitude and airspeed commands of the research aircraft were ensured through the collective adjustment of the blade pitch angle of the four turbofan propellers in conjunction with symmetrically or differentially operable control surfaces (elevons) in the wake of ducted propellers.
From the two X-22A vehicles which were built, the first (see Fig. 5.23, R/N 1520) crashed on 8th August 1966 after just 15 flights due to a hydraulic double failure. The second X-22A (see Fig. 5.24, R/N 1521) was equipped by Calspan with a computer-controlled simulation system for generating variable flying qualities. In the simulation mode the test pilot in the left seat could feel and evaluate the artificially modified control and stability properties in the hover and during the transition phase, whereas the safety pilot in the right seat could at any time switch over to the mechanical back-up control and take over the command.

X-22A R/N 1520

X-22A R/N 1521
In the period starting from the maiden flight on 19th May 1969 up to June 1970 a total of 400 vertical takeoff and landing flights, 200 short takeoff and landing flights, and finally 185 transitions between vertical and horizontal flight (Fig. 5.25) were executed for the US Navy Air Force and Army, NASA and FAA. In July 1970, the X-22A was handed over to Calspan for further research flights. These included test flights for the AV-8B Harrier II project and the development of a HUD (Head-Up Display) vision system. The X-22A was also employed at the US Naval Test Pilot School USNTPS for demonstration and training purposes and delivered important data for flying qualities specifications of future vertical and short take-off aircraft. These data ultimately contributed also to the success of the V-22 Osprey program. As a spin-off-product, a new air data sensor LORAS (Linear Omnidirectional Resolving Airspeed System) was developed for vertical and short takeoff aircraft (V/STOL) and helicopter, which is deployed today worldwide in series production helicopters. After a total of 500 flights with 405 flight hours, the X-22A was decommissioned in October 1984 and is now at the Niagara Aerospace Museum to admire (see Fig. 5.26).

X-22A during transition

Decommissioned X-22A R/N 1521 (Credit Micha Lueck)
5.2.1.12 Boeing NCH-46 VSC (1972–1988)
A Boeing CH-46A was converted by the US Naval Test Pilot School (USNTPS) to a test helicopter NCH-46 VSC with variable flying qualities (Variable Stability and Control—VSC), which served the test pilot school until the mid-80s for educational and training purposes. By the end of 1972, the hover-autopilot from Sperry was modified in such a way that the series-servos in the pitch and roll axes could change the stability properties in these axes with limited authority. A variable stick force feel system was foregone. In 1981, Calspan modified the VSC computer system and the control laws. With these modifications the system reliability was increased, and thereby the flight test engineer who operated the VSC system onboard could be omitted. Besides the test pilot training, important contributions to the development of new flying qualities criteria and MIMO (Multiple Input—Multiple Output) flight control laws could be achieved (see Fig. 5.27). In 1988 the aircraft was returned to the US Navy.

NCH-46A
5.2.1.13 Learjet Model 24D VS (Since 1981)
In the late nineteen-seventies, the life of the two B-26B (see Sect. 5.2.1.9) approached the termination and activities began at Calspan to convert a Gates Learjet (Model 24D, R/N N101VS) to a training aircraft with variable stability (VS) in the three primary control axes (pitch, roll, and yaw) (see Fig. 5.28). Only in this way continuity of training flights for the test pilot schools US Air Force (AFTPS, Edwards AFB, CA) and the US Navy (NTPS, Patuxent River, ML) could be maintained over longer periods. One of the main reasons for buying a Learjet was the structural robustness and also the high thrust to weight ratio.

Calspan gates Learjet 24 N101VS
Adequate space allowed the test and safety pilots, in addition to the time proven juxtaposition of cockpit seats, inclusion of an additional observer and a flight test engineer. The maneuverability was almost like that of a combat aircraft in subsonic flight range. New vanes were installed for the measurements of angles of attack and sideslip as well as electrohydraulic actuators were integrated for electronic control of the elevator, rudder, and ailerons. The right cockpit seat for the test or student pilots was provided with programmable operating elements, such as a centrally and laterally arranged stick (center stick and sidestick) and rudder pedals. The center stick and rudder pedals were freely programmable to produce a sufficient bandwidth of artificial control force (Artificial Feel).
At the beginning of VS system equipping, 64 parameters of an analog computer had to be programmed to define a particular configuration for an in-flight simulation. Alltogether, 128 different aircraft configurations were stored onboard, and each of these configurations could be selected by the safety pilot with a push of a button. Thereby the safety pilot in left cockpit seat remains in a position to intervene and take over control of the aircraft at any time on reaching the set simulation limits. The first flight of the Learjet with a system for the variable controllability and stability took place in February 1981. In later years, the analog computer of VS-system was replaced by a digital computer. Thereby the preparation and conducting of experiments could be further improved, especially in the areas of modeling and simulation in real time and flexible programming of the display imagery.
5.2.1.14 Learjet Model 25B/D VS (Since 1991)
After about ten years, because of the increasing demand for training flights with in-flight simulators at the international test pilot schools, another Gates Learjet (Model 25B, R/N N102VS) was procured by Calspan, that was initially equipped with a VS system similar to that in the Learjet Model 24B VS (see Fig. 5.29). The first flight took place in March 1991. Since then this Learjet is deployed as an in-flight simulator also in Europe, for example at the test pilot schools EPNER (France) and ETPS/NTPS (England). The VS system was in the meantime modernized and now includes an explicit Model Following system with MATLAB Simulink® software in conjunction with a so-called Real-Time Autocode.

Calspan gates Learjet model 25B N102VS (Credit Calspan)
In 2007, a third Learjet (Model 25D, R/N N203VS) was incorporated into the Calspan fleet. Finally, in 2014 a fourth Learjet (Model 25D R/N N304VS, formerly N515TE) was procured.
With the Learjets of Calspan, many flight test programs were carried out for civil and military aircraft projects and their avionics components. In agreement with the FAA, since the beginning of 2000 training programs are offered for commercial pilots of scheduled and charter airlines, which should lead to a better perception and responsiveness under uncontrolled flight conditions (Loss of control—LOC). The Learjet training program (Upset Recovery Training—URT) is based on actually occurred aircraft accidents and it allows to illustrate and perform the same in the safer environment of in-flight simulation of chosen commercial aircraft with safety pilots under very realistic environmental conditions. Such training programs appear particularly useful with increasing automation of aircraft in connection with unexpected aerodynamic disturbances such as turbulence, wake vortices and icing, during faults or failures of aircraft engines, airborne and sensor systems as well as in operating errors and faulty pilot communications. Because of the importance of the global civil traffic aviation safety, the US Aviation Insurance Company Global Aerospace participates in this training program since mid-October 2013.
Further, noteworthy programs were flown with the Learjet N102VS as so-called replacement aircraft (surrogate aircraft). The program simulated an unmanned aircraft X-47B with the aim of an autonomous refueling task (Autonomous Aerial Refueling—AAR, see Figs. 5.30 and 5.31).

Calspan Gates Learjet model 25B N102VS with a refueling nose probe

Calspan Gates model 25B N102VS during autonomous air refueling
In conclusion, four variable stability Learjets continue the legacy of in-flight simulation (IFS) at Calspan. Each aircraft is equipped with a programmable Fly-by-Wire/Light control system that allows for modification of the dynamics of the base Learjet airframe. While the aircraft have been used for manned aircraft handling qualities evaluations for decades, the programmable nature of the VSS allows the aircraft to be used also as UAV surrogates to test the latest in unmanned aircraft technologies [12].
5.2.1.15 General Dynamics NF-16D VISTA (Since 1992)
The US Air Force commissioned in 1988 General Dynamics with the conversion of a General Dynamics F-16D series vehicle to an in-flight simulator with supersonic capabilities called NF-16D VISTA (Variable Stability In-Flight Simulator Test Aircraft). Calspan was subcontracted to install computer-controlled central and lateral side control grips for the test pilots and to develop a digital computer system for generating variable flying qualities (Variable Stability System—VSS). In the tandem cockpit, the test pilot sat in the front with programmable visual displays and behind him the safety pilot who also directed and monitored the test program. The integration of this VSS simulation system with the standard Fly-by-Wire computers of the F-16D base aircraft provided in the late 80s a special innovational boost. The development of the NF-16D (AF 86-048) was completed in April 1992 (see Fig. 5.32).

NF-16D VISTA (AF 86-048)
Meanwhile, from July 1993 to March 1994, the NF-16D VISTA was converted for the MATV technology program (Multi-Axis Thrust Vectoring) to test the controlled flight at high angles of attack using thrust vectoring and was tested at the Air Force Edwards Flight Test Center (see Sect. 6.2.2.18). Already in mid-1994 the variable stability system was reinstalled and was available again for training purposes and in-flight simulations at the Wright Patterson Air Force Base from January 1995.
The first comprehensive simulation program was flown in the year 1995 for the USAF project YF-22. Since then VISTA was equipped with other components such as a helmet mounted and head-up display (HMD, HUD) and employed in a variety of research and development programs. On October 1, 2000, the NF-16D was transferred to the test pilot school AFTPS at the Edwards Air Force Base. With the support of Calspan, there it continues to be operated further for test pilot training and selected research programs (see Fig. 5.33).

NF-16D VISTA flight test preparations
An adaptive flight controller that could enable pilots to save a damaged or out-of-control aircraft was tested on the F-16D VISTA in cooperation with the University of Illinois and the USAF Edwards TPS (1st flight August 26, 2016). The adaptive controller dubbed LI was designed as a backup safety flight control system (FCS) to augment a standard FCS in a conventional aircraft, or as the main control system for an unmanned aircraft.
The LI controller operates in real time to predict transient behavior by estimating an aggregate of uncertainties, rather than relying on the selection of preprogrammed gains, as do most other adaptive FCS. The controller includes a state predictor and a fast estimation law, which together approximate the dynamics of the aircraft in order to rate system uncertainties. These estimates are provided as input to a bandwidth-limited filter that generates a control signal to the FCS. The test and evaluation campaign covered 20 flight hours.
5.2.1.16 Sikorsky NSH-60B VSC (1992–2011)
Besides the hired in-flight simulators from Calspan (B-26B, NT-33A, X-22 VS, Learjet Model 24 VS), since the 70s the US Naval Test Pilot School (USNTPS) operated its own variable stability aircraft like the NCH-46 VSC, which was, however, returned to the US Navy in 1988. Since 1992, two Sikorsky H-60B with irreversible hydraulic flight control and autopilot equipment with 10% control authority were selected as successors. The simulation system (Variable Stability and Control—VSC) delivered by Calspan worked on the principle of response feedback, enabling the variation of flying qualities in the pitch, roll, and yaw axes. For this purpose, the hydraulic actuation systems and sensors of autopilot system were enhanced through installation of position transducers on control inceptors and rotor blades and a 3-axis pitch, roll, and yaw rate gyro package. The safety and instructor pilot sits on the left in the cockpit, and on the right-hand side the test or respectively the student pilot. From both places the VSC system could be operated and flown. Via a so-called configuration selection system (Configuration Control System—CCS), the digital computer provided for 146 different models (configurations) to choose from within a few seconds. To suppress the coupling of higher frequency rotor-controller-fuselage oscillations, extensive frequency response analysis and measurement signal filtering were performed during system testing. In safety-critical flight conditions, both pilots were reverted back to the basic control system. Because of increasing maintenance efforts on the helicopters, both the NSH-60B VSC were grounded in 2011 (see Fig. 5.34).

NSH-60B VSC
5.2.1.17 NUH-60L VSS (Since 2016)
As a part of the call for proposal, since July 7, 2013 a follow-up program was prepared at the U.S. Naval Test Pilot School (USNTPS) for its both NSH-60B VSC helicopters. It was originally planned to integrate the VSS system, at that time developed by Calspan for the NSH-60B (see Sect. 5.2.1.16) with an ability to modify the stability and control properties, with new hardware and software, in two UH-72 Lakota, to be designated as NUH-72 VSS. This helicopter type would have been ideally suited as host helicopter due to its high control effectiveness in the rotor system. Regrettably, however, the decision was taken by the customer that Calspan should carry out the conversion of two Sikorsky UH-60L VSS Black Hawk helicopters (NUH-60L, see Fig. 5.35), a helicopter type which flew for the first time already on October 17, 1974. NUH-60L is in operation since 2016.

NUH-60L of the US Navy test Pilot School
The VSS system is designed for the three primary axes (pitch, roll, and yaw). These include intelligent electromechanical actuators (Smart Electro Mechanical Actuator—SEMA), again with a limited authority for expedious and cost-effective modification and certification. The in-flight simulators converted in such a fashion would receive a military certification (NAVAIR Flight Clearance), which is, however, based mostly on the civilian FAA type approval and thereby ensuring a more low-cost supply of spare parts.
5.2.2 NASA
5.2.2.1 Grumman F6F-3 VS (1952–1956)
As already explained in the introductory Sect. 5.1, NASA Ames Research Center played a pioneering role in implementing the first ideas of an in-flight simulation. With a converted Grumman F6F-3 VS (see Fig. 5.1, NACA 158) the worldwide first aircraft with a limited variable stability capability was created in the year 1948. The basic idea is traced back to the NASA engineer William Kaufmann, who critically followed up the heavy expenditure on the construction of three Ryan FR-1 Fireball aircraft configurations with different wing dihedral positions to determine the optimal lateral stability, presented by the rolling moment due to sideslip. This is an important flight mechanical parameter, which affects significantly the lateral flight behavior while initiating a turn. W. Kaufmann developed a concept for artificially influencing the rolling moment due to side slip in flight using tools based on control technology, which was patented in 1955. His system for varying the rolling moment due to side slip was based on actuating the ailerons as a function of the angle of sideslip. Later on, the electromechanical actuation of the rudder as a function of gyro-measured roll and yaw rates, as well as a function of the vane-measured angle of sideslip were added. The F6F-3 VS was deployed for a variety of flight tests to determine flying qualities criteria pertaining to the lateral-directional motion and for industrial assessment of the optimum rolling moment due to side slip in aircraft projects even before the first flight (see Fig. 5.36).

F6F-3 and the NACA Ames team (1950)
5.2.2.2 Lockheed T-02/TV-1 VS (1952–1960)
In 1951, the NASA Langley Research Center received for research purposes a Lockheed TV-1 (BuNo 124933, redesignated since 1962: T-33B), which was fitted under the nose with a fixed vertical fin and a hinged control surface (see Fig. 5.37). The control surface was connected mechanically with a yaw rate gyro. The aim of this study was to investigate the influence of this variably adjustable damping device on the Dutch Roll (yaw oscillation) behavior at high airspeeds. As early as 1958 flight tests were undertaken for the first time with a sidestick controller in combination with an irreversible hydraulic flight control system.

US Navy Lockheed TV-1 at NASA Langley
5.2.2.3 North American F-86A VS (1950–1956)
To extend the recent variable stability investigations with the F6F-3 for determination of optimal flying qualities to the new generation of fast flying swept wing configurations, initially a North American F-86A (see Fig. 5.38, AF 47-609, NACA 135) and later an improved F-86E (see Sect. 5.2.2.7) as well as a YF-86D (see Sect. 5.2.2.5) were equipped at NASA Ames with variable stability (VS) systems. The F-86A VS system was limited to the yaw axis, and the rudder was operated via electrohydraulic means. During the period from 1952 to 1956, complementary in-flight simulations of an entire range of aircraft projects were completed with the F-86A and the F6F-3 to evaluate the flying qualities before the first flight. These included aircraft designs in different categories such as D-558-II, XF-10F, X-1 variants, B-58, XF-104, XF8U-1, F9F-9, XT-37, B-57D, T-38 and the large flying boat P6M with four turbojet engines on the wings.

F-86A (NACA 135)
5.2.2.4 Sikorsky HO3S-1 (1952–1958)
In the year 1952, a Sikorsky HO3S-1 (H-5F) helicopter was converted to the first helicopter with a variable stability and control potential, and since 1953 was operated by the NASA Langley Research Center (see Fig. 5.39, NACA 201). For this purpose, the pilots drove the electromechanical actuators through a modified autopilot with adjustable potentiometers, in parallel to the basic control in the pitch, roll, and yaw axes. In this way, the ratio of the stick displacement to attainable control moment (control power) and the damping in the pitch, yaw and roll axes could be varied. In an emergency, the safety pilot had direct access to the mechanical control system of the basic helicopter. With this flight vehicle, a first database used to determine the flying qualities requirements of helicopters was flown.

HO3S-1 (NACA 201)
5.2.2.5 North American YF-86D (1952–1960)
NASA Ames upgraded a North American YF-86D with a simulation system for changing the flying qualities in the longitudinal mode (see Fig. 5.40, NACA 149). This included variable stick feelings such as force gradient and sensitivities using electro-hydraulic means. These control inputs were generated by the pilot using potentiometers and fed directly to the horizontal stabilizer. To change the stability behavior, the measurement signals of angle of attack and the yaw rate were fed back with variable adjustable gains to the horizontal tail. With this flight vehicle, unstable configurations were flown for the first time and handling qualities assessed. Such investigations became of special importance later in the development of Fly-by-Wire systems for unstable aircraft. Also at DFVLR corresponding investigations were carried out in the late 70s with the HFB 320 FLISI (see Sect. 7.3.12).

YF-86D (NACA 149)
5.2.2.6 Grumman F9F-2 (1954–1955)
The flying qualities of a Grumman F9F-2 Panther (BuNo 122560) were modified by NASA Langley using an autopilot with limited authority (see Fig. 5.41). The roll and pitch attitude signals could be introduced with the aid of an analog computer. Also, testing of a sidestick device in conjunction with various artificial stick forces (adjustable spring or damping characteristics) was a part the NASA Langley research program. Originally built as a F9F-3, this test aircraft had a Pratt and Whitney J42 turbojet power plant, hence the designation change. This research aircraft served long enough at Langley to witness the change from the NACA to NASA on October 1, 1958.

F9F-2 at NASA Langley
5.2.2.7 North American F-86E (1957–1959)
While the variable stability system of the F-86A (NACA 135) was limited to the yaw axis, the North American F-86E could be driven electro-hydraulically both in the yaw and the roll axis via computer and thus the stability and control parameters of the lateral-directional motion could be varied (see Fig. 5.42, NACA 157). Because the F-86E compared to the F-86A was also equipped with a servo-controlled electro-hydraulic horizontal stabilizer as default, the aerodynamic parameters of the longitudinal motion could also be varied based on control engineering measures. Through separate servo actuators on the left and right ailerons, they could also be activated symmetrically. This meant that by combining symmetrical aileron and horizontal tailplane deflections the flight in the turbulent air could also be simulated. The main objective of these investigations focused on the identification of critical stability parameters in the longitudinal and lateral-directional motion, for which the flying qualities were still judged to be acceptable by the test pilots during both high-speed flights at high altitude and landing approach.

F-86E (NACA 157)
5.2.2.8 Grumman F-11F-1F (1960–1961)
The Grumman F-11F Tiger became worldwide famous, because on September 21, 1956, it shot down itself after overtaking a projectile fired from its own onboard cannons. In the research at NASA Langley Research Center, the F-11F-1F with a powerful J-79 jet propulsion had proved more useful (see Fig. 5.43). The longitudinal control system (pitch control) of the supersonic aircraft was provided with a variable steering assistance system (Variable Control and Response Feel), which could be influenced by five flight measured variables, namely control surface deflections and their rate of change, vertical acceleration, pitch rate and pitch acceleration. The flight test results showed that only a well-matched ratio of vertical and pitch accelerations ensured optimal steering assistance with adequate flight stability.

F11F-1F at NASA Langley
5.2.2.9 North American JF-100C (1960–1972)
After the development of the F6F-3 at the NASA Ames Research Center, the concept of in-flight simulation was evolutionarily continued with the aforementioned NASA F-86 Series (F-86A, YF-86D, F-86E). Finally, in the year 1960, a North American F-100C was converted to an in-flight simulator JF-100C (see Fig. 5.44, AF 31709, NASA 703), initially for the X-15 reentry and landing simulation. The research aircraft was subsequently transferred to the NASA Flight Research Center, which was later named after the NASA researcher Hugh Dryden and from 2014 has been renamed after the NASA test and astronaut pilot Neil Armstrong. The JF-100C had, like for the aforementioned NASA variable stability aircraft, the flight critical disadvantage of single seat capability, which posed special challenges to the test pilots during system failures.

JF-100C (NASA 703)
The X-15 flying qualities were realized using two mobile analog computers, which, on the ground, when connected with the JF-100C also enabled ground-based simulations as a system check before the actual in-flight simulation. With the JF-100C also safety-critical flight conditions with roll and yaw damper failures were investigated. After the aircraft returned to Ames Research Center in the year 1964, there were further investigations on the effectiveness of a direct lift control (DLC) to improve precision approach procedures for air refueling (see Fig. 5.45).

JF-100C with NASA Ames team
5.2.2.10 Bell X-14A/B (1960–1981)
The VTOL experimental aircraft Bell X-14A, looking somewhat unusual (see Fig. 5.46, NASA 234), was constructed in an extremely short period of time partially using construction components from two Beechcraft aircraft, namely 35 Bonanza and T-34A Mentor. The first flight in hover took place on February 17, 1957. The first complete VTOL cycle with transition to the wings supported flight was performed on May 24, 1958.

X-14A (NASA 234)
The X-14A had an open cockpit, two turbojet engines with thrust vectoring arranged in parallel and a programmable analog computer to generate variable flying qualities. During the period from 1961 to 1971, extensive in-flight simulations for extracting flying qualities criteria for flight in hover and during transition phase were performed at the NASA Ames Research Center. These flight tests played later an important role in the development of British vertical takeoff aircraft Hawker P.1127, from which the V/STOL fighter aircraft Harrier emerged. Also, it should not be forgotten that in 1965 Neil Armstrong tried out and trained on the X-14A the flying qualities of the Apollo Lunar Module (Lunar Excursion Module—LEM) (see Fig. 5.47 and Sect. 6.1.3.3).

X-14A with Neil Armstrong (center) 1965
In the year 1971, the X-14A was fitted with new engines, a new digital system for in-flight simulation and was designated X-14B (see Fig. 5.48, NASA 704). With this version, a new model following system (Variable Stability Control Augmentation System—VSCAS) was tested for attitude changes during precision hover with V/STOL aircraft. About 25 test pilots flew the X-14B. During the last flight in 1981 with the project pilot Ron Gerdes, a programming error led to saturation of the roll-actuators with unstable oscillations, which resulted in a crash. He came out without injuries from that and flew later in Braunschweig the helicopter in-flight simulator Bo 105 ATTHeS of the German Aerospace research Center DLR under the MoU Helicopter Flight Control (see Sect. 12.3.3).

X-14B (NASA 704)
5.2.2.11 Boeing-Vertol YCH-46C (1962–1975)
After the initial experiences and successes with the HO3S-1 as an experimental helicopter with variable stability and control capabilities, in the year 1962, the US Army made available to the NASA Langley Research Center a Boeing-Vertol YHC-1A BV (Army 58–5514) with tandem rotor assembly. It was soon renamed as YCH-46C and equipped with an efficient system for generating variable stability and control characteristics (see Fig. 5.49, NASA 533). The 4 degrees of freedom, namely pitch, roll, yaw, and vertical dynamics, were driven by electro-hydraulic actuators in parallel to the mechanical control system. For the actual in-flight simulation, the then new method of explicit model following control was applied.

YCH-46C (NASA 533)
With the YCH-46C an extensive flight test database was flown for the development of flying qualities guidelines for helicopters. In the year 1968, at the NASA Langley Research Center the project VALT (VTOL Approach and Landing Technology) was launched, for testing special landing approach procedures (Decelerating Approaches) under poor visibility and low cloud levels (Zero Visibility, Zero Ceiling). In the year 1968 the worldwide first fully automated landing on a pre-assigned target point was performed. The utilization of YCH-46C ended in the year 1974 after 12 years of service with 685 flight hours and impressive flight test results [13].
5.2.2.12 Lockheed C-140 JetStar GPAS (1965–1977)
In June 1964, at the behest of NASA Dryden Research Center, Calspan equipped a Lockheed C-140 JetStar, labeled GPAS (General Purpose Airborne Simulator) with an electro-hydraulic flight control system to modify the flying qualities (see Fig. 5.50, NASA 14, later: 814). The aircraft was fitted with a 4-axes simulation system (pitch, roll, yaw, and thrust modulation) and was delivered in November 1965 to the NASA Dryden Flight Research Center. In summer 1971, the landing flap system was supplemented with direct lift control (DLC) devices. With the help of an explicit model following system, different configurations to be simulated could be programmed on an analog computer. The test pilot sat on the left seat and had at disposal a set of programmable, transport aircraft specific control input and vision systems (displays). The safety pilot on the right had access to the basic system of the JetStar. A flight test engineer in the cabin operated the simulation system. After a demonstration flight for Wernher von Braun, he called the procedure “Dial-a-Model”, a term which was later cited often by many to illustrate the flexibility of the model following principle.

C-140 JetStar (NASA 814)
The range of applications of GPAS included initially in-flight simulations and training flights for the XB-70 Valkyrie Mach3 large aircraft project, investigations on the rolling behavior of transport aircraft, and fundamental research on the effect of visual and motion cues in the general simulation techniques on the typical example of XB-70. Further investigations from the early 70s addressed the influence of controller strategies to damp the aircraft reactions in turbulent air. In 1972, studies were initiated at NASA to develop a special in-flight simulator for the Space Shuttle project. To obtain a database, in-flight simulations of the approach and landing behavior of the Space Shuttle were carried out with GPAS in 1977. These support activities yielded a substantial contribution to the development of the Shuttle Training Aircraft—STA (see Sect. 5.2.2.14).
5.2.2.13 Boeing 367–80 SST (1965–1966)
To investigate the approach and landing properties of a large transport and supersonic aircraft (Supersonic Transport—SST), at the behest of NASA Langley, the prototype of the Boeing 707 with the designation B-367–80 (Dash 80) was converted to an in-flight simulator (see Fig. 5.51). From May to October 1965, the test pilots from Boeing, NASA, the US regulatory authority FAA (Federal Aviation Administration), and airlines flew a database on the stability and flight control parameters for the flight at low speed, which should serve certification requirements of future supersonic transport aircraft with variable sweep or double delta wings. Thereby, the Boeing flight mechanics engineer Phil Condit probably must have made special important contributions, because in 1992 he was nominated as Chairman of the Board of Directors and in 1996 the CEO (Chief Executive Officer) of Boeing.

Boeing 367-80 at NASA langley
5.2.2.14 Grumman C-11A STA (1976–2011)
A major challenge, and at the same time a special honor, for selected NASA astronaut pilots was to command a Space Shuttle “Orbiter” space vehicle. This manned space transportation system is practically a bluff body with an unfavorable glide ratio of 4.5. It is not an easy-to-handle flight vehicle: it is the world’s largest, heaviest and fastest space transport glider, in other words a sailplane. The Space Shuttle, classified as an extremely sluggish vehicle, flies unpowered after the re-entry into the atmosphere, and has to be landed safely on the very first approach by the pilot, who had not yet adapted himself to the influence of earth’s gravity after several days of weightlessness in space. To reduce the risks during landing, a comprehensive training program was developed with the aid of an in-flight simulator, which possessed roughly the same flying qualities as the space shuttle. Thus, the C-11A Shuttle Training Aircraft—STA evolved, based on a Grumman Gulfstream G-2 business aircraft equipped with variable flying qualities. For the Space Shuttle Program of NASA spread over more than 30 years, a total of 4 STA training aircraft were manufactured, two in 1976, another in 1985 and finally the fourth one in 1990 (see Fig. 5.52).

Shuttle Training Aircraft (STA)
The Gulfstream G-2 was selected due to its maximum achievable altitude of about 12,000 meters and a large fuel reserve, which enabled a total of 10 full landing approaches. The required stabilized steep descent with an over 20° glide path angle was possible only through massive reduction of the so-called L-over-D-ratio (Lift over Drag) by increasing the aerodynamic drag of the Gulfstream II. This was accomplished through an additional (third) pair of wing flaps and through in-flight activated thrust reversal of the two engines.
In the cockpit, on the left-hand side, the controls and instruments of the Space Shuttle (see Fig. 5.53) were duplicated for training pilots, while for the safety pilot on the right-hand side the original control and instrumentation of Gulfstream II STA were retained (see Fig. 5.54).

Space Shuttle cockpit (Endeavour)

STA Shuttle training cockpit (left)
Astronaut pilots, who were to fly the Space Shuttle for the first time, must have successfully achieved at least 500 steep descents with subsequent landing (see Fig. 5.55). On an average, the STA operation accumulated about 500–600 flight hours annually. On December 2, 2003, during a flight in the reverse thrust simulation mode, the right engine thrust reverser, tailpipe and cowling had separated from an STA. The safety pilot could regain control with the mechanical backup system of the training aircraft and made a normal landing. With better engine fittings in place, the STA fleet could resume their practice shuttle landings on January 12, 2004. With the last landing of Space Shuttle on July 21, 2011, the flight operation of STA training aircraft at NASA was also discontinued.

STA Shuttle approach simulation
5.2.2.15 Boeing CH-47B (1979–1989)
As a successor of YCH-46C, the NASA Langley Research Center, supported by the US Army, received a Boeing CH-47B Chinook. The helicopter had received under the so-called TAGS program (Tactical Aircraft Guidance System) a triple-redundant digital Fly-by-Wire system to demonstrate advanced flight control concepts. The CH-47B was developed to an in-flight simulator to further support the VALT Program (VTOL Approach and Landing Technology) (see Fig. 5.56, NASA 544). It was ultimately transferred to the NASA Ames Research Center in the year 1979.

CH-47B VALT (NASA 544)
At Ames Research Center, the TR-48 analog computer was replaced by two digital computers and was equipped with a programmable stick force simulation (Force-Feel System) and additionally with a programmable color display (see Fig. 5.57, NASA 737). With this equipment, the CH-47B, somewhat sluggish in its flight dynamics, was deployed for many flight experiments, and extensive flight test databases were generated to support new flying qualities guidelines. In developing new flight controller concepts for a helicopter on the basis of so-called MIMO (Multi Input—Multi Output) systems, the importance of unmodeled rotor dynamics was realized. As such for identification and validation of mathematical models incorporating higher-order rotor dynamics, extensive flight tests were additionally undertaken. Based on these findings, jointly with the German Aerospace Research Center (DLR) in Braunschweig, represented through Gerd Bouwer, a revised model following controller was developed, which resulted in significantly improved in-flight simulation accuracies [14] (see also Sect. 12.3.3). In 1989, the CH-47B was returned to the US Army, where it was converted to a CH-47D version.

CH-47B (NASA 737)
5.2.2.16 British Aerospace YAV-8B VSRA (1984–1997)
To date, last V/STOL research aircraft at NASA Ames Research Center is based on a V/STOL prototype AV-8A Harrier of the US Marines. It was handed over by US Marines to NASA in 1984 with the aim to develop concepts of flight control and flight status display (Displays) for the next generation of V/STOL Aircraft. The now under the name YAV-8B VSRA (V/STOL Systems Research Aircraft) operated experimental aircraft received a digital Fly-by-Wire flight control system for the primary axes pitch, roll, yaw, and thrust vector control (thrust magnitude and direction) as well as a programmable Head-Up Display (see Fig. 5.58, NASA 704).

YAV-8B VSRA (NASA 704)
Extensive flight experiments to develop optimal flight control laws for a variety of missions were performed. This included the design of a three-axis airspeed command control system (translational rate command system), which turned out to be favorable during precision hover and vertical landing. In conjunction with the NASA VMS ground-based simulator (Vertical Motion Simulator), flying qualities criteria for future STOVL (Short Take-Off and Vertical Landing) aircraft were developed and new flight control laws and display symbologies were designed for precision approach and landing. These and many other flight test results were incorporated till 1997 in the F-35 development program (Joint Strike Fighter—JSF).
5.2.2.17 Sikorsky JUH-60A RASCAL (Since 1989)
As a successor to the CH-47B, NASA Ames received in 1989 the Sikorsky UH-60A Black Hawk, which was originally upgraded by Boeing to Fly-by-Light test vehicle ADOCS (Advanced Digital Optical Control System) (see Sect. 6.2.2.13). In the subsequent years, extensive modifications were carried out. These included a programmable Fly-by-Wire flight control system with full authority, a variety of additional instrumentation, active and passive sensors and the installation of another workstation in the cabin for a flight test engineer. The hydro-mechanical flight control system of the UH-60A was at disposal as before to the safety pilot as back-up. The first flight tests focused on flight control laws to increase flight agility and safer flying through automatic limitations of flight envelope (Carefree Maneuvering). The actual preparation for in-flight simulation with this research helicopter, now designated JUH-60A RASCAL (Rotorcraft Aircrew Systems Concepts Airborne Laboratory), began in 2006 (see Fig. 5.59, NASA 750). Gradually the proven principle of explicit model following control using linear and nonlinear models and frequency-dependent feedback as controller architecture was introduced in the in-flight simulation.

JUH-60 RASCAL (NASA 750)
After more than 20 years of research activities with the JUH-60, a computer problem was encountered, which was hardly noticed in the initial phase. As a part of system modifications, the circuit board of 32-bit onboard computer developed by Boeing for the Fly-by-Wire flight control system was aging and became prone to errors. Documentaries needed to repair were missing. Consequently, at not so insignificant expenses and considerable time, the so-called Reengineering was performed to keep the systems operational.
Toward the end of 2012, fully autonomous flight tests close to the ground were carried out with the JUH-60A to test new technologies that facilitate autonomous helicopter flight without a crew. The JUH-60A flew in an altitude range of 60–120 m above the ground. The airspeed during these flights was limited to 40 knots (75 km/h).
5.2.2.18 McDonnell Douglas F/A-18A FAST (2012–2014)
FAST
The highly instrumented and with a powerful digital FBW flight control system equipped research aircraft F/A-18A FAST (Full-scale Advanced Systems Testbed, NASA 853, see Fig. 5.60) was deployed at NASA Armstrong Research Center in the recent years for a variety of research programs. With the onboard computer system (Airborne Research Test System Computer) available to users, different and extensive user programs could be very efficiently implemented. About two particularly interesting flight test programs will be reported hereinafter. Incidentally, because of the multiple structural changes to the structure such as a hump on the fuselage, it was nicknamed “Frankenstein” by the NASA researchers.

FA-18A FAST (NASA 853)
LVAC
Can a rocket maneuver like an airplane? Can an aircraft serve as a substitute for a maneuvering rocket? Precisely, that is what the NASA investigated under the flight test program LVAC (Launch Vehicle Adaptive Control). For the medium-term development of the manned US space transport system SLS (Space Launch System) being developed, the Fly-by-Wire onboard computer system of the F/A-18A was programmed in such a way that it could simulate the flight conditions of the SLS at takeoff and ascent before the first flight of the SLS rocket and could check the control algorithms. In the event that something went wrong during the experiment, the F/A-18A safety pilot could passivate the SLS Simulation system and take over control of the test vehicle.
The flight test program LVAC enables the simulation of the autonomous flight control system of the SLS and its required reactions to compensate unexpected disturbances during the ascent of the rocket such as wind effects, structural vibrations or fuel sloshing. The NASA carried out for the first time the testing of a flight control system which could autonomously identify and compensate such interferences encountered during the actual flight. The first flight tests for real-time adaptation of the SLS autopilots took place on November 14–15, 2013 and included 40 test scenarios of SLS relevant trajectories. This allowed extensive checking of the autonomous flight control system until the planned first flight of the SLS in 2017 for uncertainties and risks under realistic flight conditions. As a project illustration, Fig. 5.61 shows a SLS wind tunnel model in the transonic wind tunnel of NASA Ames Research Center.

SLS wind tunnel model
ICP
In the year 2012, a flight test program in its first phase was completed with the F/A-18A FAST and it was demonstrated that by modifying the flight control laws the fuel consumption in cruise flight could be reduced. The research program, known under the acronym ICP (Intelligent Control of Performance), employed an optimization algorithm PSA (Peek-Seeking Algorithm), with which the aerodynamic control surfaces were tuned such that the aerodynamic drag could be reduced. The exploitation potential for future civil aviation purposes is quite interesting.
5.2.3 US Industry
5.2.3.1 Mc Donnell XF-88A (1954)
During the USAF flight test of the McDonnell XF-88A Voodoo prototypes (see Fig. 5.62) it turned out that the lateral-directional flying qualities were highly unsatisfactory. Thus, to mitigate the Dutch Roll behavior and the roll coupling potential, initially, a yaw damper using yaw rate gyro signals was switched on the rudder. Later through additional inclusions of sideslip angle and roll rate signals to the ailerons, variable flying qualities in the lateral-directional mode of motion could be produced. It was the aim to define, from the perspective of test pilots, tolerable flight mode limits in the case of system failures.

XF-88A (AF 46-525)
5.2.3.2 Mc Donnell NF-101A (1963–1964)
A little known, short flight test program of the US Air Force Flight Dynamics Laboratory (FDL) embodied a certain limited in-flight simulation of the analog electro-hydraulic flight control system in conjunction with a sidestick for the X-20 Dyna Soar orbiter project on the NF-101A (AF 53-2422) (see Figs. 5.63 and 5.64). In the X-20 project, based on the ideas of Eugen Sänger, at that time a highly innovative Fly-by-Wire flight control system (FCS) was conceptualized by Boeing and Honeywell. Citing Ref. [15]:

X-20 Dyna Soar mockup

NF-101A (AF 53-2422)
The X-20 Flight Control System was designed to satisfy attitude control and stability requirements throughout the hypersonic-subsonic flight regime for the glider and glider/transition (abort) configurations.
Among the unique features employed in the FCS were the completely Fly-by-Wire techniques wherein all signals to or from the FCS computer were electrical. In other words, all pilot control signals and all signals to the aerodynamic, thrust vector, and reaction controls were electrical. Another unique feature pertains to the manner that stability was provided to an aerodynamically unstable configuration consisting of the glider and abort rocket. This was accomplished by means of simultaneous aerodynamic and thrust vector control.
The FCS employed dual and triple redundancy to attain a high order of reliability. Redundancy was also carried out, as far as practical, in the electrical connectors, isolation of electrical wiring bundles, electrical circuit mechanical isolation, and environmental isolation by careful orientation of mechanically sensitive components.
Within the framework of NF-101A in-flight simulation, the main focus was on optimization and evaluation of flying qualities of the aerodynamically unstable X-20 in low-speed flight. The promising X-20 project was discontinued in the year 1964.
5.2.3.3 Convair NF-106B VST (1968–1971)
At the Martin Marietta company two Convair F-106B delta wing aircraft (AF 57-2519 and -2529), commissioned by the USAF, were converted to variable stability aircraft (see Fig. 5.65). They were deployed by the USAF Test Pilot School at Edwards Air Force Base with the label NF-106 VST for advanced pilot training. The main modifications included an analog computer, which performed the model following computations for selected flight conditions, and an electro-hydraulic stick force simulation system, which reproduced correctly the control forces for the configuration being simulated in the rear cockpit of the test pilots. The safety pilot in the front cockpit remained during the in-flight simulation connected with the basic flight control system. Through the so-called Stability Parameter Programmer, he selected for the test pilots the various configurations to be simulated with different flying qualities depending on the altitude and Mach number. Thus, over the period from 1968 to 1971 various flight missions were performed for investigation and evaluation of the dynamic behavior of reentry vehicles (Lifting Bodies) such as the X-20 Dyna Soar, the X-24A, the Space Shuttle, and also a few X-15 configurations. The model following controller was designed applying the classical root locus method of W. R. Evans. Problems were encountered whenever the structural vibrations of the NF-106A were excited by the injection of acceleration signals. Due to the significant maintenance efforts, relatively few flight hours were gathered over a period of almost three years.

NF-106B VST
5.2.3.4 Sikorsky S-76A SHADOW (1983–1995)
In preparation for the RAH-66 Comanche project of the US Army, during the mid-nineteen eighties a S-76 was equipped by Sikorsky as an in-flight simulator with an additional cockpit in the fuselage nose (see Fig. 5.66). The research helicopter was called SHADOW (Sikorsky Helicopter Advanced Demonstrator of operator workload). The test equipment included a digital Fly-by-Wire system with a programmable simulation computer, corresponding sensors for determination of the flight condition, and a programmable display. Two safety pilots in the original cockpit of S-76 could at any time take over the helicopter for safety reasons. Additionally, programmable three- and four-axes sidesticks were developed, with which by deflections pitch and roll commands were initiated, and by rotating and vertical pulling or pushing the yaw and heave motion (bob-up and down) of the helicopter were controlled respectively. The main objective was to test new technologies, for example, vision and sensor systems as well as control laws, which enabled safe flight under poor visibility conditions, also close to the ground without overstraining the pilot.

S-76A SHADOW
5.2.4 US-Universities
5.2.4.1 Ryan Navion (1952–1954)
Already in the years from 1952 to 1954, commissioned by the US Air Force Wright Air Development Centers (WADC), the Princeton University had undertaken flight tests on a Ryan Navion to assess the influence of springs and masses (bob weights) in order to obtain a constant stick force in the flight control system on the longitudinal motion. Both spring and bob weight, when employed in a right manner, are used to supply the pilot with what he wants It was demonstrated that the classical longitudinal dynamics, such as the Phugoid and Short Period modes, could be changed into aperiodic motion forms (see Fig. 5.67).

L-17A Navion—1948
5.2.4.2 Piasecki HUP-1 (1958–1960)
A so-called Variable Stability System (VSS) for the Piasecki HUP-1 (S/N 15, R/N N4015A) tandem rotor helicopter was realized by the Princeton University through modification of the autopilot and was limited to the roll and yaw axes of the helicopter (see Fig. 5.68). Little is known about research results. FAA registration was cancelled on June 20, 1963.

Princeton HUP-1
5.2.4.3 Ryan Navion VRA (1968–1988)
In the nineteen sixties, a Ryan Navion (R/N N91566) was converted by the Princeton University to a test aircraft with variable flying qualities. This so-called Variable Response Research Aircraft (VRA) was used for research and education purposes untill the end of nineteen eighties (see Fig. 5.69). The test or evaluation pilot sits in the cockpit on the left hand side. The Navion VRA used a digital Fly-by-Wire control system to activate the electro-hydraulic actuator systems using full authority in all control axes. Additionally, a flap system was integrated for fast regulation of lift (Direct Lift Control—DLC). The position of the side force generators (Direct Side Force Control—DSFC) on the middle wing was determined by systematic wind tunnel tests at NASA, so that lowest possible coupling effects arose. After more than 20 years of flight research with the Navion VRA, and except for the absence of the lateral force generators almost similar sister aircraft Navion ARA (Avionics Research Aircraft), both the aircraft went in the inventory of the Space Institute of the University of Tennessee.

Princeton Navion VRA
5.2.4.4 Ryan Navion VSRA (Since 1989)
In the year 1988, the Space Institute of the University of Tennessee (UTSI) took over from the Princeton University both the Ryan Navion research aircraft with variable stability equipment and since then operates them under the name of Variable Stability Research Aircraft (VSRA, R/N N55UT, R/N N66UT, see Figs. 5.70 and 5.71). While with the R/N N66UT five degrees of freedom could be influenced, the R/N N55UT could generate side forces through two lateral force control surfaces, centrally placed on the wings, and thereby all six degrees of freedom could be exploited for the in-flight simulation purposes.

UTSI Navion (R/N N55UT) with side force generators

UTSI Navion (R/N N66UT)
5.3 Canada
5.3.1 Pioneering Contributions of NRC Aerospace
In the early nineteen-sixties, after termination of the national supersonic fighter program Arrow, the National Aeronautical Establishment (NAE) of the Canadian National Research Council (NRC) in Ottawa shifted its aeronautical related research priorities to the area of rotorcraft and to vertical and short take-off (V/STOL) technologies. The Canadian aerospace industry was already very successful in the development and marketing of small transport and commuter aircraft such as the Beaver and Twin Otter, and as such, they wanted to technologically further expand the international utility-potential of such V/STOL aircraft.
To improve the flying qualities of future V/STOL aircraft, for the first time, helicopters with variable flying qualities were developed since 1961 at the NRC Flight Research Laboratory (FRL) [16]. At first, two Bell H-13G helicopters as long-term loans from the US Army were available, which were converted to flight vehicles with variable stability flying qualities. The principle of explicit model following control for generating reproducible, variable flying qualities was applied for the first time (see also Chap. 3).
Today, the NRC Aerospace in Ottawa possesses, besides the DLR in Braunschweig and the US Army/NASA Ames Research Center, the core competencies in the field of rotorcraft in-flight simulation. The Canadian research helicopters are presented below.
5.3.2 Bell H-13G (1962–1968)
The first helicopter with limited variable stability characteristics in the three primary axes of pitch, roll, and yaw was realized in the early 60s with a Bell H-13G alias Bell-47G loaned from the US Army (see Fig. 5.72). For this purpose, various stability and control parameters could be selectively modified through the potentiometers on an analog computer, which was located between pilot controls and autopilot system. The test pilot on the right side in the cockpit translates his commands by means of control sticks and pedals, whose control forces were variably adjustable. The main feedback variables in the model following control were the measured rotational rates about the primary axes. Up to 14 measurement signals could be recorded on a data recording device (Recorder). The electro-pneumatic servo motors, which operated in parallel with the mechanical control system of the host helicopter, drove the rotor blades and the tail rotor with almost full authority. And yet the servo actuators could be overridden in emergencies by the safety pilots seated left in the cockpit. The simulation system could also be switched off via a button on the control grips. Due to the lack of space, a part of the test equipment was accommodated in containers mounted outside.

NRC Bell H-13G airborne simulator
With this research helicopter systematic investigations to assess flying qualities of V/STOL aircraft were carried out for the first time. Also, in-flight simulations were undertaken with Bell H13G of NRC to evaluate the flying qualities behavior of the German VTOL hovering rig SG-1262 (see Sect. 6.1.3.8) in the course of preparation for the first flight of the VTOL prototype VFW VAK191.
5.3.3 Bell 47G3 (1966–1970)
Unlike the Bell H-13G, besides controlling the three rotational degrees of freedom (pitch, roll, yaw) the Bell 47G3B-1 was provided with an additional vertical control option through collective blade pitch deflections (see Fig. 5.73). Again, due to the lack of space, a part of the experimental equipment was accommodated in external containers. The extensions of the analog computer capacity were carried out at the NRC, and to reduce system lags and time delays the electro-pneumatic regulators were replaced through electrohydraulic actuators. The allocation of pilot seats and roles remained unchanged compared to the Bell H-13G.

NRC Bell 47G3B-1 airborne simulator
The test vehicle was deployed for basic investigations in the field of V/STOL flying qualities requirements as well as for simulating selected V/STOL aircraft projects. So the influence of directional stability (weathercock stability) on the flying qualities during landing approach was examined and comparatively assessed under visual and instrumental conditions. Project support was provided, for example, for the V/STOL tilt wing research aircraft Canadair CL-84. Thereby the impact of delays and errors in the flight control system on the handling qualities was simulated even before the first flight.
5.3.4 Bell 205A-1 (1970–2012)
A substantially improved in-flight simulator, especially with regard to the control capability, was realized with the procurement of a Bell 205A-1 (see Fig. 5.74). The helicopter was provided with a single-channel full authority Fly-by-Wire system, an improved hybrid computer (digital-analog), a programmable control unit and a sidestick. As in the case of the predecessor Bell 47G3, the three rotational degrees of freedom (pitch, roll, yaw) and the vertical motion could be influenced. The test pilot on the right was provided with displays for real and artificial visual representations of the environment.

NRC Bell 205A-1
Extensive research programs in the area of development of flying qualities criteria for V/STOL and STOL flight vehicle were flown with the Bell 205A-1, which have also been incorporated in the V/STOL flying qualities requirements issued by the Advisory Group for Aerospace Research and Development (AGARD). Likewise, important contributions were made to the US Army flying qualities requirements for control augmented helicopters (Aeronautical Design Standard for Helicopter Handling Qualities—ADS-33C). Project support was provided, for example, for the pre-flight testing of the critical flight envelope of the British VTOL research aircraft Short SC.1, for the test pilot training with the propeller-driven V/STOL tilt wing aircraft Canadair CL-84, for the assessment of a pitch attitude controller of the Hawker Siddely Harrier, and for the optimization of the tail rotor of the Sikorsky-76 helicopter. Not to go unmentioned the extensive in-flight simulations to integrate programmable multi-axis controller units and sidesticks in conjunction with different control concepts such as Rate Command/Attitude Hold (RC/AH).
5.3.5 Bell 412 ASRA (Since 2001)
With The Bell 412 ASRA (Advanced Systems Research Aircraft) the NRC has at disposal, for the first time, an in-flight V/STOL simulator with four rotor blades (see Fig. 5.75). ASRA was in turn equipped with a four-axes digital Fly-by-Wire system and extensive Avionics. The test pilot operates a programmable multiaxial sidestick. The Fly-by-Wire system was first commissioned on February 9, 2001.

NRC Bell 412 ASTRA
The testing of a control strategy, that should simplify in a special way the different maneuvering requirements on a helicopter under conditions of poor visibility, proved to be an interesting utilization program. While so far the pilot had to select different control strategies depending on the flight task, attempts were made for the first time with a so-called “Super-TRC” command system (Super-Translational rate Command) to automatically select in each case the correct control strategy through continuous recording of the control activity of pilots. For flight close to the ground in poor visibility a cautious control activity of the pilot is required (small amplitude, low frequency), hence, the Fly-by-Wire system commands horizontal speed inputs in conjunction with an increased attitude stabilization. In contrast, if the pilot calls for fast and large changes in the course (large amplitudes, higher frequencies), the system provides attitude rate commands in conjunction with reduced damping. In conclusion, it is to be noted that the automatic monitoring of the pilot intentions related to stability or agility is an appealing approach for future man-machine requirements not only in the field of aviation.
5.4 England
5.4.1 Short SC.1 (1957–1971)
The Short SC.1 (Registration number XG900) was a single-seat low-wing aircraft, that was designed as a tailless delta aircraft (without horizontal tailplane). The propulsion for vertical flight consisted of four vertically mounted Rolls-Royce RB108 engines in the fuselage and a RB.108 in the tail for forward flight. The SC.1 was designed for hovering and low-speed flight and for the intermediate transitions phase. The control and stabilization were carried out in low-speed flight via reaction jets in the fuselage nose, tail and at the wing tips. Swiveling of the fuselage-mounted engines about the lateral axis of the machine allowed a change in direction of the thrust vector. The SC.1 had the first Fly-by-Wire system, which was introduced in a vertical takeoff aircraft (Vertical Take-Off and Landing—VTOL), and thereby provided the potential of in-flight simulation. The first vertical takeoff took place on October 25, 1958, the first transition flight on April 6, 1960 (see Fig. 5.76).

Short SC.1
The single-channel Fly-by-Wire system allowed systematic flight tests with variable stability in the low-speed regime. Due to the lack of system redundancy, the flight experiments close to the ground were associated with a higher risk and even led to a fatal crash following a system failure. The flight tests were continued and served to identify desirable flying qualities in different phases of flight as a function of variable control effectiveness and damping parameters, and also under the effect of the engine dynamics and the ground effect. Thus, a first solid database for future flying qualities criteria for VTOL aircraft could be created.
5.4.2 Beagle Bassett VSS (1973–2014)
The UK Empire Test Pilot’s School (ETPS) in Boscombe Down received in June 1973 a Beagle Basset CC.1 (R/N XS743) as a training aircraft that was equipped by the Cranfield Institute of Technology (C.I.T.) with a system for changing the stability and control characteristics (Variable Stability System—VSS) (see Fig. 5.77). This aircraft conceptualized for commuter flights was also utilized by Prince Charles to acquire his pilot license for aircraft with two engines. The analog computer of the VSS receives the electrical commands from the right control column of student pilots, disconnected from the mechanical control, and passes them on in a suitable form to the aerodynamic control surfaces. Through the potentiometers of the board analog computer, the training pilot in the left seat can now vary the flying qualities to a limited extent. Thus, the Bassett aircraft could be felt as having flying qualities, for example, like that of a large sluggish transport aircraft or of an airplane with system failures. Should the training pilots make serious operating mistakes, the VSS system switches off and the instructor can take over the command with the mechanical basic controls. The aircraft, finally with equipment of antiquarian value, has completed 40-years of successful deployment.

Beagle Basset CC.1 XS743
5.4.3 BAE VAAC Harrier T.2 (1985–2008)
To provide a solution to the original three-hand problem, namely the simultaneous operation of control stick, throttles and nozzle angle while maneuvering the British vertical takeoff Hawker Harrier aircraft, in the year 1985 the Cranfield Institute of Technology (C.I.T.) equipped a two-seater Harrier T.2 training aircraft (XW175) with a digital, two-channel duplex Fly-by-Wire system and a new rear experimental cockpit (see Fig. 5.78). The front cockpit retained its original equipment for the safety pilot. In the subsequent years, with this equipment various cockpit systems, variable control strategies and software versions could be checked for acceptance by the test pilot. After the retrofitting, dubbed as VAAC Harrier, the experimental aircraft (Vectored-Thrust Aircraft Advanced Flight Control—VAAC) was operated by QinetiQ, the successor of RAE/DERA.

BAE VAAC Harrier (Credit Andrew Dickie)
The VAAC Harrier provided support in the development of the Lockheed Martin F-35B V/STOL version of the US-American JSF (Joint Strike Fighter) development program. For this purpose, the rear cockpit of the test pilot was equipped with two control units (Inceptors) to replicate the so-called Unified Control Mode of the F-35B. Future F-35B pilots operated with the left hand a linear thrust adjustment device for controlling the forward and reverse speeds and with the right a sidestick for vertical and lateral control commands.
5.4.4 BAE ASTRA Hawk (Since 1986)
As a supplement to the classic Beagle Basset VSS, in the early 80s, the conversion of a two-seater BAE Systems Hawk T.1 to an in-flight simulator began at the Empire Test Pilot’s School (ETPS) in cooperation with the Cranfield Institute of Technology (C.I.T.) (see Fig. 5.79). The flying qualities of this research and training aircraft Hawk ASTRA (Advanced Stability Training and Research Aircraft) can be changed during the flight by the instructor and safety pilot in the rear cockpit. At the same time, he could monitor the simulation system or turn off the same in an emergency. In the front cockpit for training pilots, the mechanical control was disconnected from the host system and replaced through electronically connected control sticks in the center and on the right side with variable force or deflection characteristics. The same applies to the rudder pedals with variable force and deflection characteristics. Likewise, the imagery in the Head-up Display could be changed with the aid of computers. The actual Fly-by-Wire system employs electro-hydraulic rotary shaft drives, which establishes the connection to the aerodynamic control surfaces and are driven by the simulation computer. With the simulation system switched on, virtually the entire flight envelope of ASTRA Hawk with Mach numbers up to 0.7, load factors of −1.75 to +6.5 g and roll rates of 200°/s could be flown. Since the first flight in 1986, it was available at the ETPS 1990 onwards for training purposes.

ASTRA Hawk
5.5 France
5.5.1 Dassault Mirage IIIB SV (1967–1990)
Even before the first flight of the Anglo-French supersonic airliner Concorde 001 (first flight: March 2, 1969), a two-seater Dassault Mirage IIIB (S/N 225) was equipped at the CEV (Centre d’Essais en Vol) with special Fly-by-Wire electronics in the flight control system to change its flying qualities in such a way that the resulting flight mechanical properties and the control behavior corresponded to that of the Concorde (see Fig. 5.80). With this Mirage IIIB (labeled “Stabilité Variable”—SV) extensive in-flight simulations were performed for the Concorde Project. With its special simulation capabilities, it was employed also for the development of the analog Fly-by-Wire flight control system with multiple redundancies for the first European fighter plane Mirage 2000 with a fully electronic flight control. Furthermore, it served the French test pilot school EPNER as a training aircraft. Today, it is in the Saint Victoret Museum in Marseille.

Mirage IIB (S/N 225)
5.5.2 Dassault Mystere/Falcon 20 CV (1978–1982)
Since the mid-70s, at the behest of DGA (Direction Générale de l’Armement), the first production aircraft the Dassault Mystère/Falcon (S/N 401, F-WMSH) was converted to an in-flight simulator in all six axes (labeled “Characteristics Variable”—CV). Besides the initial analog Fly-by-Wire system, later to be equipped with two digital computers, and an additional direct lift control system to the flaps (Flaperons), aerodynamic control surfaces were mounted vertically in the center wing section for direct side force control (Travelons) (see Fig. 5.81).

Mystere-Falcon 20 CV without and with side force control surfaces (Credit Jean Francois Georges)
An onboard computer was to cater for the in-flight simulation capabilities in all 6 degrees of freedom. The simulation pilot sat on the left in the cockpit with a control station decoupled from the basic mechanical controls. The scope of simulation included the entire flight envelope and was limited in the first phase to the 3 rotational degrees of freedom and 2 translational degrees of freedom, that is, to the longitudinal and vertical acceleration. In the second phase, it was planned to generate lateral accelerations by means of the Travelons.
The main scope of application was the testing of digital flight control systems and the creation of civilian certification criteria for future commercial aircraft with reduced stability that promised increased performance. For the first application of an in-flight simulation, the Dassault Mercure project was selected, with a mathematical model structure being quite familiar to the Dassault company. These flight demonstrations occurred as yet without the active deployment of Travelons. That was to take place later with considerable technical efforts and financial expenditures. Despite the good quality of these first results, the project in 1982 was terminated due to financial reasons.
Apparently, the ability to responsibly manage the in-flight simulators is beneficial for the personal career, because it is worth to point out that the Mystere/Falcon 20 CV project manager Jean-Francois Georges was appointed in 1995 as the Chief Executive Officer (CEO) of the Dassault Falcon Jet Corporation, similar to what happened in the case of the Boeing 367–80 SST in-flight simulator (see Sect. 5.2.2.13).
5.6 Russia
5.6.1 Tupolev Tu-154 M FACT (Since 1987)
For the sole purpose of the simulation of the Russian manned space vehicle Buran, four Tupolev Tu-154B passenger aircraft were simultaneously converted to in-flight simulators at the Research Center Zhukovsky of the Flight Research Institute (FRI), also called Gromov Institute named after a famous Russian test pilot. These aircraft served during the beginnings of the 1980s the development and optimization of the Buran flight control laws with subsequent test pilot assessment of the flying qualities and training of the cosmonaut pilots [17]. Similar to the NASA C-11A STA (Shuttle Training Aircraft), for realization of the simulation of the steep descent of the manned Buran space shuttle, the thrust reversal of both laterally mounted jet engines of T U-154B had to be used in flight. The resulting aerodynamic interferences between the deflected thrust stream and the tail plane had to be adapted in the modeling of the Tu-154B host aircraft. As is generally known, the Buran Project was discontinued due to the technological and economic difficulties. A copy of the Buran Space Shuttle, being equipped with four auxiliary engines on the rear fuselage conducted flight tests for the validation of the landing capability and cosmonaut training (see Fig. 5.82), is now part of the Aviation Museum in Speyer.

The Buran brigade
Since 1987, the FRI fitted the prototype of the Tu-154 M (temporarily also being designated as Tu-164) with a Fly-by-Wire system with the aim of building a general purpose in-flight simulator to support the development of new aircraft in addition to testing new flight control, operating and display systems, the verification and extension the flying qualities criteria, and to establish certification procedures for future Fly-by-Wire aircraft. The Tu-154 M (R/N RA-85317) was finally designated FACT (Future Aircraft Control Testbed, see Fig. 5.83). From the left cockpit seat of the Tu-154 FACT, the test pilot operates the Fly-by-Wire system, whereby the operating elements, in terms of stick force characteristics (Feel Characteristics) as well as the display imageries (see Fig. 5.84), could be adapted in flight with computer assistance. The safety pilot on the right-hand monitors the conventional mechanical flight control system and the classical flight instruments of the host aircraft. In the case of system errors or at flight envelope boundaries, he can switch off electrically the simulation system or take over the manual control by pressing the control column and transfer the aircraft into the basic flight mode. The TU-154 FACT, in the meantime, also supported transport and commercial aircraft projects such as An-70, Il-96 and Tu-204 and for the development and testing of sidestick devices, displays and filters for the suppression of so-called PIO (Pilot Induced Oscillations).

Tu-154 M FACT

Tu-154 M FACT simulation cockpit (left)
5.6.2 Sukhoi Su-27 ACE (Since 1990)
The Sukhoi Su-27 ACE (Advanced Control Experiment), modified to an in-flight simulator by the Flight Research Institute FRI, became economically very attractive as the number of aircraft prototypes needed for a new aircraft design and to reach a production-readiness state could be reduced. A variety of equipment components such as a digital Fly-by-Wire system, sensors, and cockpit components are available on the Su-27 ACE (S/N 24-05 or code LMK-2405, identification code “05”, see Fig. 5.85). As such, imageries for the displays and alternative configurations of sidesticks, could be optimized relatively easily for special applications. Also, pre-testing of flight control algorithms (control laws) could be carried out and their influence on the flying qualities be assessed by the test pilot. The single-seat cockpit probably appears to be disadvantageous, as it does not facilitate separating testing functions and safety measures and thereby leading to the higher workload for the test pilots.

Su-27 ACE
5.6.3 Yakovlev Yak-130 (Since 1999)
As a part of a joint Russian-Italian Trainer Development Program between Yakovlev and Aermacchi, the prototype Yak/AEM-130D (R/N RA-43130) made its first flight on April 25, 1996. In the year 2000, the partnership was dissolved and the project was further developed in two separate national programs, e.g. the Yakovlev Yak 130 and Aermacchi M-346 (see Sect. 5.9) training aircraft with variable flying qualities respectively. Through a Fly-by-Wire flight control system in conjunction with special flight control laws uncontrollable flight conditions can be prevented (Flight Envelope Protection). An outstanding feature of this training aircraft is the option to adopt during flight the flying qualities of selected types of aircraft such as MiG-29, Su-27, Su-30, F-15, F-16, F-18, Mirage 2000 Rafale, Typhoon. For this purpose the safety and instructor pilot selects on the onboard computer the corresponding computer model for the aircraft to be simulated (Dial-a-Model) in each case. The first production prototype made its maiden flight on May 19, 2009 (see Fig. 5.86).

Yak-130
Thus, a project idea of DLR from the year 1984, namely to routinely introduce the potential of in-flight simulation for training of young pilots (CASTOR, see Sect. 11.2), became a reality after a quarter of a century.
5.7 Japan
5.7.1 Kawasaki P-2H VSA (1977–1982)
At the behest of the Japan Defense Agency (JDA), the Kawasaki Heavy Industries (KHI) converted a Lockheed P2 V-7 (License: P-2H) Neptune to an in-flight simulator P-2H VSA (Variable Stability Aircraft). The first flight took place on December 23, 1977. The essential modification features included the installation of a Fly-by-Wire flight control system with a mechanical backup for the safety pilots, replacement of the mechanical control system through an electrically driven control wheel with variable force gradient for the test pilot seat on the right hand side, and a powerful onboard computer to carry out all simulation operations. The outer landing flaps were converted for direct lift control, while the aerodynamic side force generator was integrated vertically on the top and underneath the center wing (see Fig. 5.87). In addition, two perforated airbrakes below the fuselage (Ventral airbrakes) were installed. Thus, in its role as an in-flight simulator, it could be driven with 5 degrees of freedom independent of each other (pitch, roll, yaw, as well as vertical and lateral translations). In an emergency at any time, the safety pilot sitting left in the cockpit had an access to the mechanical control system of the host aircraft. While initially the flight tests were conducted to determine the effectiveness of the direct lift and side force generators in the operational flight regime, after a period of two years of testing by the test pilot school the P-2H VSA was transferred to JMSDF (Japanese Maritime Self Defense Force) for the training of future pilots. During this time, steep approach procedures making use of the air brakes were tested up to 7° glide path angle. The aircraft was decommissioned in 1980.

P2H VSA
5.7.2 Beech B-65 VSRA (1980–2011)
A Beech B-65 was converted at the National Aeronautical Laboratory NAL (now Japan Aerospace Exploration Agency JAXA) to a test vehicle with variable stability (Variable Stability Aircraft Research—VSRA) in five degrees of freedom (no side force generator, see Figs. 5.88 and 5.89). For the utilization of the test demonstrator, the model following control principle was adopted. It played a significant role in the pre-testing and evaluation of flying qualities of the four-engine STOL research aircraft ASUKA (see Fig. 5.90). Later it was deployed mainly for the exploration of the flight in the atmosphere. The last flight took place on October 26, 2011.

B-65 VSRA of NAL

B-65 VSRA simulation cockpit, right

STOL research aircraft ASUKA
5.7.3 Dornier Do-228-202 MuPAL-α (Since 1987)
A Dornier Do-228-200 was equipped by JAXA (formerly NAL) and Kawashai and designated Do-228-202 MuPAL-α (Mu lti p urpose A viation L aboratory; αεροσκáφος = aircraft) with a digital two-channel (duplex) Fly-by-Wire system (see Fig. 5.91). Elevator, rudder, and ailerons, as well as both the engines, were driven electrically. The landing flaps on the trailing edge were modified with fast-moving three-part, individually controllable auxiliary flaps to enable direct lift control (DLC) and thereby more precise in-flight simulations. The test pilot on the right-hand side in the cockpit actuates the control column with artificial feel. Via electrical taps the input signals were fed to the freely programmable FBW computer and forwarded to the electro-mechanical actuation system in accordance with the desired model following control laws. Thereby the response of the aircraft to both pilot as well as gusts inputs can be manipulated through control laws in the forward and feedback loops.

MuPAL Alpha
An additional experimental cockpit is located in the fuselage. It is particularly suitable for landing approach simulations at high altitudes. In critical flight situations, the safety pilot on the left hand side in the cockpit can switch back to the mechanical control system of the host aircraft. The Fly-by-Wire system was first activated in flight on November 11, 1999. Since April 2000 the aircraft is in operational service.
5.7.4 Mitsubishi MH-2000 MuPAL-ε (Since 1999)
Since March 2000, JAXA (formerly NAL) operates the research helicopter and in-flight simulator MH-2000A MuPAL-ε (Mu lti p urpose A viation L aboratory; ελικóπτερο = helicopter). It is based on the indigenously developed Japanese helicopter MH-2000A of Mitsubishi Heavy Industries (see Fig. 5.92). The experimental equipment consists of a data acquisition system for providing extensive flight test data, a cockpit display with a high-performance graphics computer to generate variable imagery (see Fig. 5.93), a video recording system for recording images of the environment for navigation purposes and a Fly-by-Wire system for in-flight simulation purposes.

MuPAL Epselon

MuPAL Epselon simulation cockpit, left
The sensor equipment includes a hybrid DGPS/INS system (Differential Global Positioning System/Inertial Navigation System), which merges satellite position data with that from an inertial platform and an ultrasonic velocity sensor for the low speed and hover range, which determines the flight speed components in all directions.
Impressive with this research helicopter is the concentrated and consequent utilization in a timely manner for various programs like in-flight simulations to evaluate flying qualities and electronic display systems as well as to improving the fidelity of ground-based simulators, GPS-supported in-flight simulations, autonomous flying, noise abatement approach procedures, and the exploration of the helicopter response behavior due to atmospheric or wake vortex turbulence.
5.8 China
5.8.1 Shenyang JJ-6 BW-1 (Since 1989)
The earliest development of an aircraft with variable stability characteristics began in China in the late 70s at the AVIC-Chinese Flight Test Establishment (SFTE) in Xi’an. A two-seater training aircraft Shenyang JJ-6 (Export Version: FT-6) was equipped with a single-axis analog Fly-by-Wire system. In a tandem-seat assembly, the test pilot occupied the front and the safety pilot the rear seat. In an emergency, the safety pilot could access the mechanical back-up control.
The so upgraded test demonstrator, which was based on the Russian Mig-19 Farmer fighter aircraft, crashed in December 1984. The subsequent development of a single-axis digital flight control system for the longitudinal motion for another JJ-6 led to a successful first flight on April 22, 1989 (see Fig. 5.94). The Fly-by-Wire flight control system and the flying qualities of a two-seater aircraft Xian JH-7A could be tested with this research aircraft designated as BW-1.

Shenyang JJ-6 BW-1
5.8.2 HAIG K8V IFSTA (Since 1997)
After another 8 years, the first flight of the training aircraft K8/JL-8 (S/N 320–203) took place at SFTE on June 25, 1997. It was designed in China (Hongdu Aviation Industry Group—HAIG) and named K8V IFSTA (Integrated Flight Simulation Test Aircraft) and was equipped with a three-axis digital duplex flight control system. Main parts of the test equipment were installed in an integrated container mounted underneath the fuselage (see Fig. 5.95). The flight control system still with a mechanical back-up can simulate the flying qualities of up to eight aircraft types with different parameter sets.

HAIG K8V IFSTA
Future planning envisages an expansion of K8V to a five-axis digital flight control system, that means the provision of additional lift and drag/thrust control devices in order to provide the test pilots a particularly realistic simulation capability. In this context, it should once more be cross referenced, that the training aircraft Yak-130 that resulted from the Russian-Italian joint project and the Alenia Aermacchi M-346 could be equipped with programmable variable flying qualities (see Sects. 5.6.3, 5.9 and 11.2).
5.9 Italy
Alenia Aermacchi M-346
After several years of development of a common training aircraft Yak-130, the partnership between Aermacchi and Yakovlev ceased in the year 2000 and both the companies followed their separate ways in the further development.
The Italian version was now called Alenia Aermacchi M-346 Master and performed its maiden flight in 2004. In the tandem arrangement, the student pilot (front) and the instructor sat one behind the other. The aerodynamics were designed for high maneuverability with extended wing leading edges and variable camber wing profile (see Fig. 5.96).

Alenia Aermacchi M-346
One of the main features of the M-346 is the four-channel (quadruplex) Fly-by-Wire flight control system from BAE Systems, which principally allows the in-flight simulation of other types of aircraft such as Eurofighter, Rafale, F/A-18 Super Hornet, MiG 29 for training purposes.
This reconfiguration is, however, controversial because some of the man-machine experts are of the opinion that the focus should not be on the type-specific training, rather on the handling of generic flying qualities, situational awareness and system or mission management.
References
Weingarten, N.C.: History of in-flight simulation at general dynamics. AIAA J. Aircr. 42(2), 290–304 (2005)
Burns, K.R., et al.: The history of aerospace research at cornell aeronautical laboratory. AIAA 2007-0359. Jan 2007
Breuhaus, W.O.: The variable stability airplane. AAHS 36(1), 29–55 (1991)
Hamel, P. (ed.): In-flight simulation for the 90’s, international symposium, 1–3 July 1991. Braunschweig, DGLR Mitteilungen 91-05 (Proceedings, Inquiries at: DLR, Institute of Flight Systems, P.O. Box 3267, 38022 Braunschweig); (1991)
Pearcy, A.: Flying the Frontiers—NACA and NASA Experimental Aircraft. Airlife Publishing Ltd., England (1993)
Borchers, P.F., et al.: Flight Research at Ames—1940–1997. NASA/SP-1998-3300, (1998)
Aiken, E.W., Hindson, W.S., Lebacqz, J.V., Denery, D.G., Eshow, M.M.: Rotorcraft in-flight simulation research at NASA Ames research center: a review of the 80’s and plans for the 90’s. NASA TM 103873. Aug 1991
Bull, G., Kidd, E.A.: Air-to-air tracking with linear and non-linear yaw damping. WADC Technical Report 55-223. June 1955
Statler, I.C., Beilman, J.L.: Dynamic lateral stability through non-linear automatic control. CAL-Report TB-698-F-1 (AFTR-6712), (1952)
Kidd, E.A., Bull, G., Harper, R.P.: In-flight simulation—theory and application. AGARD report 369. April 1961
Armstrong, N.A., Holleman, E.C.: A review of in-flight simulation pertinent to piloted space vehicles, AGARD Report 403. July 1962
Schifferle, P.: Variable Stability Learjet In-Flight Simulator Capabilities. Calspan Corporation (2014)
DiCarlo, D.J., Kelly, J.R., Sommer R.W.: Flight investigation to determine the effect of longitudinal characteristics on low-speed instrument operation. NASA TN-4364. March 1968
Hilbert, K.B., Bouwer, G.: The design of a model-following control system for helicopters. AIAA Guidance and Control Conference. Seattle, WA (1984)
McDonald, E.H., Farris, J.A.: The X-20 flight control development, R&T Division AF systems command. WPAFB, SEG TDR 64/8. June 1964
Gould, D.G., Daw, D.F.: A Historical Account of the Research Activities of the Flight Research Laboratory of the National Research Council (1943–1984). NAE MISC 59. Feb 1985
Gordon, Y., Komissarov, D.: Soviet and Russian Testbed Aircraft, Hikoki Publications Ltd. (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Hamel, P.G. (2017). Variable Stability Aircraft and In-Flight Simulators. In: Hamel, P. (eds) In-Flight Simulators and Fly-by-Wire/Light Demonstrators. Springer, Cham. https://doi.org/10.1007/978-3-319-53997-3_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-53997-3_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-53996-6
Online ISBN: 978-3-319-53997-3
eBook Packages: EngineeringEngineering (R0)