
Abstract
In the mid nineteen forties, gradual rethinking occurred in aircraft design. New requirements were made on the flight performance, flying qualities, and flight safety; for example, at higher airspeeds approaching the speed of sound compressibility effects were encountered, which led to previously unknown flight instabilities with reduced controllability. At the same time, a question of how to cope with the high forces acting on elevator and rudder with increasing size of aircraft and increased airspeeds had to be addressed. At that time the possible hydraulic or electric transmission for pilot assistance were discarded due to “a dangerous dependence of the operational reliability of such additional equipment” [1].
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords

4.1 Artificial Stabilization
In the mid nineteen forties, gradual rethinking occurred in aircraft design. New requirements were made on the flight performance, flying qualities, and flight safety; for example, at higher airspeeds approaching the speed of sound compressibility effects were encountered, which led to previously unknown flight instabilities with reduced controllability. At the same time, a question of how to cope with the high forces acting on elevator and rudder with increasing size of aircraft and increased airspeeds had to be addressed. At that time the possible hydraulic or electric transmission for pilot assistance were discarded due to “a dangerous dependence of the operational reliability of such additional equipment” [1].
In the 7th scientific meeting of the regular members of the German National Aviation Academy held on September 20, 1940, the term artificial stability was employed for the first time by the aircraft designer Ernst Heinkel (“The transition to artificial stability provided by an automatic control system would become inevitable necessary in the near future”), by the Junkers engineer Heinrich Helmbold (“The introduction of artificial stability appears inevitable at increasing airspeed”) and by Eduard Fischel (“Evolving aircraft with high airspeed cannot be built inherently that stable anymore. Therefore, the installation of automatic control systems would become ever more imperative”) [2]. Thus, in contrast to the natural or inherent stability, they described the overall stability of an aircraft, which would be ensured through automatic control devices. Influences that deteriorate the natural longitudinal stability were initially attributed in the early 1940s to increased piston engine performance and the related amplified interference effect of the propeller slipstream as well as to the new airfoils for laminar boundary layer flow. Around the same time, compressibility effects with increasing airspeed were encountered.
In the debate during the aforementioned 7th scientific meeting, the famous aerodynamics engineer from Göttingen Albert Betz pointed out possible configuration changes to abate stability problems at increasing Mach numbers, for example, canard configurations and even variable sweep wings. The first systematic control theoretical approach for calculation of artificial stability “through the intervening by automatic control devices with the aim to increase inherent stability or generate lacking stability” is attributed to E. Fischel [3]. Thereby the cornerstone was laid for the calculation of flight control systems to produce variable flying qualities.
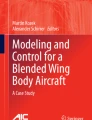
Yet another problem in the field of control and stabilization cropped up in the case of large aircraft due to the tremendous increase of control surface moments. While, for example, the airplane weight of a FW 190 from 3.2 tons increased to 93 tons of the large flying boat BV 238, that is, gone up about 30 times, already 117 times the rudder torque had to be applied in the case of BV 238 [4]. In the case of BV 222 (1940) and BV 238 (1944) Richard Vogt controlled the ever increasing growth of control forces by subdividing the elevator in an inner manual control surface ① with manageable natural control forces assisted by an auxiliary tab based on the Flettner principle and an outer control surface ② to artificially improve the pitch damping effectiveness (see Fig. 4.1). A somewhat different path was pursued in the roll control about the longitudinal axis. As seen in Fig. 4.2, the ailerons were divided in a small outer part ①, which was directly driven by manageable hand forces in the classical fashion. The inner and larger part of the aileron ② is trailed to the outer aileron, in turn, once again via a small Flettner auxiliary rudder requiring negligible additional control forces. With the method of control surface separation (Separate Surface Control), R. Vogt had achieved for the first time worldwide excellent flight test results for artificial enhancement of controllability and stability of large aircraft. In the year 1940, this technology was immediately incorporated into the series production of BV 222.

Blohm & Voss BV 238—reduction of longitudinal control forces and improving flight stability

Blohm & Voss BV 238—reduction of lateral control forces
Finally, the yaw damper-flight experiments of K.-H. Doetsch and EG. Friedrichs in the year 1944 at the German Aeronautical Research Laboratory (Deutsche versuchsanstalt für Luftfahrt—DVL) in Berlin-Adlershof served to dampen the annoying snaking motion of the Henschel Hs 129 around the vertical axis. Also, KH. Doetsch used the principle of control surface separation for the rudder (see Fig. 4.3): little more than one-third of the upper rudder was separated and with the aid of a Flettner auxiliary rudder and yaw rate feedback the snaking motion was minimized (“Overall, the tests showed the superiority of the automatism. It seems impossible to achieve such a favorable behavior by aerodynamic means” [5]). Similar investigations were also carried out by the DVL towards the end of Second World War with a Me 262 test aircraft. They led to a strong reduction of yaw oscillations during target tracking (see Fig. 4.4, [6]).

Henschel Hs 129—artificial stability (DVL-yaw damper)

Messerschmitt Me 262: artificial stabilization about the vertical axis through yaw damper
4.2 From Aerodynamic Auxiliary Devices to Controller Assistance
From today’s perspective, the aforementioned theoretical studies of E. Fischel and flight experiments by R. Vogt and K.-H. Doetsch to provide artificially controllability and stability were worldwide one of the first investigations to improve the aircraft flying qualities by automatic means. After the Second World War, both in foreign countries as well as after revival of the German aerospace research and industry, this method was deployed as an important tool for investigation and evaluation of the control and stability characteristics of the new types of aircraft, which were still in the development phase. Simultaneously, this also implied paving new ways to a more flexible aircraft design procedure with less aerodynamic crutches (auxiliary devices) such as wing fences (boundary layer fences) and vortex generators to influence separated flows and their effects on the flying qualities.
Extreme examples of such aids are highlighted in Figs. 4.5 and 4.6. Today, many effects, for example, aerodynamic instability for performance enhancement, can be compensated through specific flight control laws and strategies.

Sukhoi Su-22UM3 K—oversized boundary layer fences

Douglas A-4 Skyhawk—vortex generators on slats and wings
In the course of the time, research aircraft with variable flying qualities using analog computers evolved into the so-called in-flight simulators using digital electrohydraulic actuation systems and reliable digital computers. Therefrom the international research and development scenarios of revolutionary electronic or optical flight control technologies (Fly-by-Wire/Light) emerged without mechanical cables or control rods (see Chap. 6).
Flight vehicles with variable stability and controllability were investigated in Germany during the nineteen sixties and first flight tests with an analog computer on a Piaggio P149D at the DVL in Oberpfaffenhofen (see Sect. 7.1). The particulars of the beginnings of Fly-by-Wire research at DFL/DFVLR/DLR in Braunschweig is provided in Sect. 6.3.1. They were related to the national initiative “Variable Stability Test Beds” [7]. The objective was to convert three test vehicles based on a Fiat G 91T-3, a Bo 105 and a HFB 320 with variable stability characteristics. Since the early nineteen-seventies, this technology was developed by the DFVLR Institute of Flight Mechanics in Braunschweig (today DLR Institute of Flight Systems) with support from the DLR Institute of Flight Guidance and the national industry under project like conditions. Thereby the experimental technique of in-flight simulation could be advanced right up to the operational deployment of four in-flight simulators HFB 320 FLISI, Bo 105 ATTHeS, VFW 614 ATTAS and EC 135 ACT/FHS [8] (see Chaps. 7–10).
In-flight simulation acquired a more exotic significance in the course of industrial development of three German VTOL (Vertical Take-Off and Landing) aircraft VJ 101, Do 31 and VAK 191 [9]. As a consequence of this interest in VTOL aircraft, attention got focused during the early nineteen sixties on the development of dynamically similar hovering rigs, which were usually operated by the original engines of actual prototypes. Use of the hovering rigs was limited not only to the investigation of the controllability and stability of the VTOL aircraft in hover, but also to the pre-trials of 464 equipment components of the new aircraft projects [10] (see also Sects. 6.1.3.6 to 6.1.3.8). Many issues related to achieving good controllability during takeoff and landing, and to the transition to and from the horizontal, that is, aerodynamic flight. These investigations also delivered the first clues regarding the impact of the engine configuration on recirculation phenomena under different inflow conditions. Additionally, in 1969 a helicopter Bell 47 G with variable stability characteristics of the Canadian National Research Council was deployed for the project VAK 191 to describe and simulate the dynamics of the hovering rig SG 1262. The experiments demonstrated that the safety pilot of the Bell 47 G was able to monitor hazardous conditions (see Sect. 5.3.2).
References
Vogt, R.: Das Großflugboot BV 222 Wiking. Luftwissen 11(3), 70–74 (1944)
Heinkel, E., Helmbold, H., Fischel, E.: Natürliche und künstliche Stabilität, Jahrbuch der Deutschen Akademie der Luftfahrtforschung, pp. 281–303 (1940/1941)
Fischel, E.: Die vollautomatische Flugsteuerung, Ringbuch der Luftfahrttechnik VE4 (1940)
Vogt, R.: Steuerung von Großflugzeugen im Hinblick auf die bei Blohm & Voss beschrittenen Wege, Schriften der deutschen Akademie der Luftfahrtforschung, Vol. 1080/44 g (1944)
Friedrichs, E. G.: Überlegungen zum Schießanflug, Deutsche Luftfahrtforschung, DVL, Untersuchungen und Mitteilungen No. 1336, 28 Aug 1944
Doetsch, K.H.: Deutsche Luftfahrtforscher nach 1945 in England, DGLR-Blätter zur Geschichte der Luft- und Raumfahrt, pp. 165–188 (1992)
Benecke, Th., Dornier, S., Bölkow, L.: Versuchsträger Variabler Stabilität (VVS)—Mittelfristiges Programm, 10 Dec 1969
Hamel, P. (Ed.): The Challenge of Flight Research – A Historical Account and Technical Guide, DLR-IB 111-99/2, Braunschweig, April 1999
Schumann, H.-G.: Flugsimulation als Hilfsmittel der Entwicklung und die Deutschen Arbeiten auf diesem Gebiet, Jahrbuch 1970 der DGLR, pp. 40–58 (1970)
Hamel, P.: In-Flight Simulation in Germany – Precursors of In-flight Simulation. In: Hirschel E., Prem H., Madelung H., G.: Aeronautical Research in Germany, pp. 608–612, Springer, Berlin (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Hamel, P.G. (2017). Predecessors in Germany. In: Hamel, P. (eds) In-Flight Simulators and Fly-by-Wire/Light Demonstrators. Springer, Cham. https://doi.org/10.1007/978-3-319-53997-3_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-53997-3_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-53996-6
Online ISBN: 978-3-319-53997-3
eBook Packages: EngineeringEngineering (R0)