
Abstract
The application of soft architectures in robotics offers the potential to reduce control complexity while increasing versatility, performance and robustness of robot operation. However, current aerial robots tend to have rigid body structures, and rely predominantly on abundant sensing and dynamic closed loop control to fly. In contrast, flying animals combine sensing and control with adaptive body designs, exploiting fluid dynamic and biomechanical effects to achieve very high levels of operational robustness and multiple functionalities. This paper provides an overview of several examples in which softness is used in aerial robotics, outlining instances where inspiration from biology can be taken to develop next generation aerial robots which selectively use soft materials and adaptive morphologies to achieve high-performance flight behaviours. For illustration we describe three case studies where soft structures have been used in aerial robots: (1) to enable multi-modal mobility across terrain interfaces and fluid boundaries, (2) for robust perching in complex environments and (3) to repair and manufacture infrastructure components. These examples show the benefits that can be gained through the application of soft technologies and they outline how the bio-inspired approaches can be used to develop the next generation of flying robots.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Soft Structures in Nature
Biological systems have high degrees of controlled flexibility in their bodies which enhances their mobility and makes them highly adaptable to the environment [1–3]. For example, the wings of many birds are adapted to morph into a wide range of configurations, from extended and rigid planforms for gliding flight to highly morphed shapes during flapping and dynamic flight manoeuvres (Fig. 1a, b). This adaptive morphology of the wings can improve the animal’s energy consumption, wind resistance, increases the range of speeds at which they can fly, and improves their robustness to aerodynamic disturbances [4–6]. It is not only the active change of morphology of the wing that contributes to increased performance. For example, it has been shown that wing elasticity in bats allows for robust flight through highly cluttered environments, such as the caves and forests which they inhabit [6].

Soft structures in nature: a Perching manoeuvre of a Verreaux’s Eagle, during which the bird morphs its wings and uses its feathers as passively adapting aerodynamic structures to enable a robust deep stall manoeuvre; b diving gannet (Morus bassanus) folding its wings to dive into water; c an orb-weaver spider (Eriophora transmarina) creating an aerial web using soft tensile structures; d a nest created by a swiftlet (Aerodramus fuciphagus), using its saliva as both a structural material and adhesive. Images used under a Creative Commons license from a Steve Garvie, b Mike Pennington, c Adam Inglis and d Marcel Holyoak
The flexibility of wings in insects and birds has demonstrated importance in enabling high performance flight. For example, the deformability of insect wings during flapping flight helps to keep leading edge vortices stably attached to the insect’s wing even at high angles of attack, enhancing force generation and allowing the animal to hover or manoeuvre [4]. In birds, e.g. the steppe eagle (Aquila nipalensis) wings are adapted to reconfigure their various shapes, allowing a broad range of flight modes, from efficient soaring, to dynamic deep stall manoeuvres. The feathers of the bird’s wing also contain integrated aeroelastic elements to maintain control authority in different flight regimes [5], as shown in Fig. 1a.
Adaptive body morphologies are also key for multi-modal mobility. Many animals have evolved secondary modes of locomotion, even across multiple fluid media, which allows movement through varied terrain, escape from predators or increased access to prey. A recurring example of multimodality in nature is jump-gliding, a behaviour exhibited by many animals including several species of arboreal lizards, squirrels and primates, flying fish, and jumping insects [7]. These animals almost universally rely on soft deployable structures for flight, which are normally retracted when not airborne so as not to impair mobility, and to protect fragile lifting surfaces. Another example of multi-modal mobility are birds that are capable of propelled flight and also underwater diving. They adapt their morphology when entering the water from air allowing it to move effectively and robustly in the denser, more viscous fluid. A notable example is the common guillemot Uria aalge, a seabird which utilizes the same fundamental flapping mechanism in both air and water, morphing its wings to deal with changing force generation in water and air [8]. Other aquatic birds, in particular the members of the Sulidae family, dive directly into the water at high speeds (Fig. 1b), using flight momentum to reach depth. These birds are able to collapse their wings into a highly slender, streamlined shape to mitigate the large impact forces, and use soft air filled structures in their face and neck for protection during impact [9]. The efficacy of aerial-aquatic locomotion is not restricted to escape or prey capture; recent studies suggest that jump-gliding locomotion between air and water may be an energy saving strategy for pelagic flying squid [9, 10], which glide on wings formed by the arrangement of soft tentacles normally used for predation into an aerodynamic planform. The breadth of these multimodal behaviours is a fertile resource for the inspiration of new solutions expanding robot locomotion, increasing accessibility, endurance and performance.
Soft structures are also employed for the transition to solid surfaces from flight, both through aeroelastic mechanisms to maintain control during low speed flight (Fig. 1a) and through elastic mechanical elements which ensure robust attachment [11–13]. Many birds stall completely at the moment of attachment to a perch, and exploit an arrangement of tendons in their claws to ensure attachment to the perch whilst arresting the motion of the body [11]. At a much smaller scale, common houseflies are able to land without reducing their flight speed, instead relying on soft, compliant legs to passively damp the impact [13], which reduces the need for complex sensing and control to reliably attach to a perch (Fig. 2).

Figure reproduced from [11].
Perching strategies in flying animals change as size increases: For smaller flying bodies, both in nature and robotics, perching exploits the mechanical intelligence of the body morphology; larger systems rely on more complex control, sensing, and planning. The top panel illustrates different perching approaches in nature: Bumblebee Bombus ruderatus; housefly Musca domestica; ballooning spider genus Stegodyphus; and Verreaux’s eagle (Aquila verreauxii). In the bottom panel, examples of perching of aerial robots are shown, with robot masses indicated on a logarithmic scale: The Perching Robobee of Graule et al.; the École Polytechnique Fédérale de Lausanne Perching Microglider; the Imperial College String-Based Percher; and the Stanford Univ. Scansorial Unmanned Aerial Vehicle
Operating at a similar scale, spiders are able to create soft and flexible structures to enable both perching and aerial mobility [14–16]. By trailing fine ‘gossamer’ threads of silk small spiders are able to generate sufficient forces for flight allowing the animal to move large distances rapidly, a behaviour termed ‘ballooning’ [14]. The same silk spinning process is then used for construction of a perch for prey capture and protection (Fig. 1c). These silk webs are perhaps the most famous natural soft structure, and are used for a broad array of purposes by the many arachnid species, employing spider silks of varying strength and elasticity, with some spiders able to produce up to 8 distinct materials, including adhesives [17]. The ability of spiders to build variegated softness into their structures means that webs can resist damage during use, cope with mobile attachment points (such as tree branches), and be built in many locations.
Versatility is an essential feature of construction in an unstructured environment, something that can often be achieved not by having a broad variety of construction material but application of a single material with multiple properties. The swiftlet Aerodramus fuciphagus, a small bird weighing 15–18 g, creates nests out of solidified saliva [18], which functions as both a structural element and an adhesive, and is viscous enough to be formed into thin elements as it hardens, allowing creation of complex nests from amorphous material (Fig. 1d).
Many complex multi-modal mobility and manipulation mechanisms in nature are difficult or costly to replicate using conventional rigid robotics. Hence, creating bio-inspired robotic systems that exploit the compliant, elastic and flexible properties of biological mechanisms is a major focus of robotics research [1–3, 19]. In Table 1 we have summarised three prominent systems for high performance locomotion in nature, from which we have abstracted principles into the design of engineering systems which expand robotic capabilities, the details of which are expanded upon in Sect. 2.
2 Soft Robotic Technologies for High Performance Flight
Soft robotics is an emerging research field employing novel compliant and adaptive technologies for engineering, robotic systems and medical devices. In particular, soft robots become more unique solutions for applications that require access to hard to reach areas, safe and comfortable human-robot interactions, and where high degrees of miniaturisation, light-weight design, and flexibility is needed. To enable this, roboticists employ a number of core sensing and actuation technologies including smart materials, e.g. electroactive polymers [19–22] and memory materials [23, 24], fibre-optics [25], soft-matter electronics [26], conductive textiles [27], cable and pneumatic actuation [1, 25]. In order to design soft robotic mechanisms and morphologies, a number of methods are used including formal design methods for creating fold and bend patterns such as origami [28–30], kirigami [22, 31], morphological computation [32], bio-inspired engineering (such as abstraction of active mechanisms in nature [2]), and biomimetics [33].
In this paper, we describe a number of robotic technologies, developed at Aerial Robotics Lab, that exploit adaptive and reconfigurable mechanisms to enhance mid-flight performance for aerial-aquatic mobility [34–36], perching and construction [11, 37, 38] and 3D printing [39] with aerial robots.
2.1 Multimodality: Adaptable Wings, Mechanisms for Transition Across Fluid Boundaries
Animals able to both swim and fly are excellent examples of mobility across fluid boundaries achieved using multifunctional locomotory modules. These animals adapt their structures and behaviours to address the changing requirements of movement needed in air and water and to reduce the energetic costs of locomotion [34]. Aerial-aquatic robots face similar challenges, and must accommodate the increased structural loads, fluid inertia and drag encountered underwater, without compromising the weight and lifting area requirements of flight. To achieve this, we have developed a novel robot, called the Aquatic Micro Air Vehicle (AquaMAV) that is capable of aerial and aquatic locomotion (Fig. 3).

a AquaMAV launching out of the water using a burst of water jet thrust. b Timelapse of a launch from water, with wings deployed in final snapshot. c CAD Renderings of the AquaMAV, all images reused from [36]
A unique example of aerial-aquatic mobility can be found in the species of squid which can perform gliding leaps, taking off using pressurised jet of water [40]. While often less efficient than conventional propeller propulsion, a water jet can provide very high power densities, and importantly produces similar thrust in both air and water, which allows a vehicle to escape the water and accelerate when airborne, where drag is dramatically reduced [41]. Taking inspiration form the flying squid and other aerial-aquatic animals [34], we have created a water jet propulsion system, powered by the expansion of compressed gas [35], or water reactive combustion chemical [42] which allows the AquaMAV to rapidly escape the water, reaching speeds over 11 m/s in under 0.5 s.
When leaving the water, both flying squid [40] and flying fish [41] keep their wings folded until they are clear of the surface. There are large differences in fluid forces between the two media, and doing this protects wing structures from large hydrodynamic loads, reduces drag, and may also have stability considerations. Reconfigurable wings have also been shown to have advantages in jumpgliding [43], and are features of almost all aerial aquatic animals [41]. We have implemented this type of adaptive morphology into the AquaMAV, which has wings which can deploy into a high aspect ratio configuration for gliding, and can retract into a narrow, low drag configuration for movement underwater. This facilities rapid aquatic escape using a powerful burst of thrust, in which the robot keeps its wings retracted during acceleration, deploying them when at the apex of a jump, where it has reached an altitude and velocity sufficient for gliding flight [36].
2.2 Energy Management: Robotic Perching for Energy Saving and Enhanced Access
The typical flight times of rotary-craft MAVs are in the order of 10–20 min [44]. In order to prolong their endurance a number of studies have investigated perching as a viable power management solution. Prominent examples include mechanisms to perch to vertical surfaces and ceilings using magnetic adhesion [45], micro spines [38], electrical adhesion [46], adhesive pads [47], and hot-melt adhesives [48].
We have created a perching system to enable multirotor MAVs across a wide range of scales to maintain and control their relative altitude whilst perched upon an external structure (Fig. 4), [37]. Our method requires no active attitude control while perched, and the use of only a single motor. In order to enable the application of this technology in tightly constrained environments, we focused on subminiature multi-rotor MAVs or Nano Aerial Vehicles (NAVs), hereby proposing an NAV as a robot with a total mass of no more than 30 g and a span of less than 10 cm.

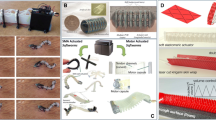
a, b Nano aerial vehicles equipped with construction and perching payloads, respectively, weighing 26 g each. The constructor payload is made up of a spool of string designed for building a tensile web structure. The percher payload consists of a hook at the end of a connecting string designed to latch on to an overhanging support element. c The constructed web structure with an NAV perched for an extended duration
2.3 Aerial Construction: 3D Printing with Flying Robots
A number of research groups have proposed approaches for construction with aerial robots, usually making use of pre-fabricated components and connectors. This has included the assembling of a beam-based structure by flying robots relying on magnetic connectors to join construction elements [49], the creation of a rope structure between two previously placed parallel elements using a mid-sized quadrotor [50]. In [51], an off-board circular motion wax 3D print deposition strategy for potential integration into aerial robots is proposed.
In order to improve the versatility of construction with aerial robots, we have developed an aerial 3D printer capable of depositing polyurethane foam to create structures during flight (Fig. 5), [39]. This allows the printing of complex 3D structures in areas which are hard to access using ground or climbing robots and enables a variety of maintenance and repair applications. The flying 3D printer has a great potential for ad-hoc construction of first response structures in search and rescue scenarios, and bridging gaps in discontinuous terrain.

Aerial construction with amorphous materials: a Static deposition of foam material on a damaged wooden beam. b Precise aerial 3D printing on a planar target from a hovering UAV
3 Conclusions
In this paper, we describe a number of examples where softness is used successfully in the animal kingdom to enhance flight performance, improve robustness and increase adaptation capabilities to complex environments and varied terrains. We also outline how these principles have been transferred to aerial robots with emphasis on adaptive and reconfigurable mechanisms to enhance mid-flight performance (AquaMAV), or perching and printing mechanisms for flight time prolongation and enhancing multi-modal mobility in flying robots (NAV percher and 3D printing UAV).
A future direction can be to investigate the integration of soft materials, passive aerodynamic structures, morphing body elements and embedded sensing and control into aerial robots. Combining novel soft technologies with traditional aerial robotic engineering approaches can substantially increase functional capabilities and flight performance for UAVs. Interdisciplinary work, at the interface of soft materials, biology, aerodynamics, smart mechanism design and control engineering, as outlined through the examples in this paper, can be the stepping stone towards a new generation of aerial robots for a wide variety of applications.
References
Trivedi, D., Rahn, C., Kier, W., Walker, I.: Soft robotics: biological inspiration, state of the art, and future research. Appl. Bionics. Biomech. 5, 99–117 (2008)
Kovac, M.: The bioinspiration design paradigm: a perspective for soft robotics. Soft Robot. 1, 28–37 (2014). ISSN:2169-5172
Kim, S., Laschi, C., Trimmer, B.: Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 31, 287–294 (2013)
Sane, S.P.: The aerodynamics of insect flight. J. Exp. Biol. 206(Pt 23), 4191–4208 (2003)
Carruthers, A.C., Thomas, A.L., Taylor, G.K.: Automatic aeroelastic devices in the wings of a steppe eagle Aquila nipalensis. J. Exp. Biol. 210(Pt 23), 4136–4149 (2007)
Stowers, A.K., Lentink, D.: Folding in and out: passive morphing in flapping wings. Bioinspiration Biomimetics 10, 025001 (2015)
Low, K., Hu, T., Mohammed, S., Tangorra, J., Kovac, M.: Perspectives on biologically inspired hybrid and multi-modal locomotion. Bioinspiration Biomimetics 10(2), 020301 (2015)
Lock, R.J., et al.: Development of a biologically inspired multi-modal wing model for aerial-aquatic robotic vehicles through empirical and numerical modelling of the common guillemot, Uria aalge. Bioinspiration Biomimetics 5, 046001 (2010)
Daoust, P.Y., Dobbin, G.V.: Descriptive anatomy of the subcutaneous air diverticula in the Northern Gannet Morus bassanus. Seabird 21, 64–76 (2008)
Rayner, J.: Pleuston: animals which move in water and air. Endeavour 10(2), 58–64 (1986)
Kovac, M.: Learning from nature how to land aerial robots. Science 352, 895–896 (2016)
Evangelista, C., Kraft, P., Dacke, M., Reinhard, J., Srinivasan, M.V.: Landing manoeuvres of the honeybee Apis mellifera. J. Exp. Biol. 213, 262–270 (2010)
Hyzer, W.G.: Flight behavior of a fly alighting on a ceiling. Science 137, 609 (1962)
Humphrey, J.A.C.: Fluid mechanic constraints on spider ballooning. Oecologia 73, 469 (1987)
Schneider, J.M., Roos, J.M., Lubin, Y., Henschel, J.R.: Dispersal of Stegodyphus dumicola (Araneae, Eresidae): they do balloon after all! J. Arachnol. 29, 114 (2001)
Reynolds, A., Bohan, D., Bell, J.: Ballooning dispersal in arthropod taxa: conditions at take-off. Biol. Lett. 3(3), 237–240 (2007)
Craig, C.L.: Evolution of arthropod silks. Annu. Rev. Entomol. 42, 231–267 (1997)
Kang, N., Hails, C.J., Sigurdsson, J.B.: Nest construction and egg-laying in edible nest-swiftlets Aerodramus spp and the implications for harvesting. IBIS 133(2), 170–177 (1991)
Kim, K., Tadokoro, S.: Electroactive Polymers for Robotic Applications, 1st edn, p. 281. Springer, London (2007)
Sareh, S., Rossiter, J.M., Conn, A.T., Drescher, K., Goldstein, R.E.: Swimming like algae: biomimetic soft artificial cilia. J. R. Soc. Interface 10, 20120666 (2012)
Sareh, S., Conn, A.T., Rossiter, J.M.: Optimization of bio-inspired multi-segment IPMC cilia. SPIE 7642 (2010)
Sareh, S., Rossiter, J.M.: Kirigami artificial muscles with complex biologically inspired morphologies. Smart Mater. Struct. 22, 014004 (2013)
Mazzolai, B., Margheri, L., Cianchetti, M., Dario, P., Laschi, C.: Soft-robotic arm inspired by the octopus: from artificial requirements to innovative technological solutions. Bioinspiration Biomimetics 7, 025005 (2012)
Rossiter, J.M., Takashima, K., Scarpa, F., Walters, P., Mukai, T.: Shape memory polymer hexachiral auxetic structures with tunable stiffness. Smart Mater. Struct. 23(4), 045007 (2014)
Sareh, S., Noh, Y., Li, M., Ranzani, T., Liu, H., Althoefer, K.: Macro-bend optical sensing for pose measurement in soft robot arms. Smart Mater. Struct. 24, 125024 (2015)
Bartlett, M.D., Fassler, A., Kazem, N., Markvicka, E.J., Mandal, P., Majidi, C.: Liquid metals: stretchable, high-k dielectric elastomers through liquid-metal inclusions. Adv. Mater. 28(19), 3791 (2016)
Viry, L., Levi, A., Totaro, M., Mondini, A., Mattoli, V., Mazzolai, B., Beccai, L.: Flexible three-axial force sensor for soft and highly sensitive artificial touch. Adv. Mater. 26, 2659–2664 (2014)
Sareh, P., Guest, S.D.: Design of non-isomorphic symmetric descendants of the Miura-ori. IOP J. Smart Mater. Struct. 24(8) (2015). http://dx.doi.org/10.1088/0964-1726/24/8/085002
Sareh, P., Guest, S.D.: A framework for the symmetric generalisation of the Miura-ori. Int. J. Space Struct. 30(2), 141–152 (2015)
Zhang, K., Qiu, C., Dai, J.S.: An extensible continuum robot with integrated origami parallel modules. ASME Trans. J. Mech. Robot. 8, p. 031010 (2016)
Saito, K., Agnese, F., Scarpa, F.: Cellular Kirigami morphing wingbox concept, intelligent material systems and structures. J. Intell. Mater. Syst. Struct. 22(9), 935–944 (2011)
Pfeifer, R., Iida, F.: Morphological computation: connecting body, brain, and environment. In: Sendhoff, B., Körner, E., Sporns, O., Ritter, H., Doya, K. (eds.) Creating Brain-Like Intelligence. Lecture Notes in Computer Science, vol. 5436, pp. 66–83. Springer, Heidelberg (2009)
Vincent, J.F.V., et al.: Biomimetics: its practice and theory. J. Roy. Soc. Interface 3(9), 471–482 (2006)
Siddall, R., Kovac, M.: Launching the aquamav: bioinspired design for aerial–aquatic robotic platforms. Bioinspiration Biomimetics 9(3), 031001 (2014)
Siddall, R., Kovac, M.: A water jet thruster for an aquatic micro air vehicle. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3979–3985 (2015)
Siddall, R., Kovac. M.: Fast aquatic escape with a jet thruster. ASME/IEEE Trans. Mechatron. (2015, in review)
Braithwaite, A., Alhinai, T., Haas-Heger, M., McFarlane, E., Kovac, M.: Tensile web construction and perching with nano aerial vehicles. In: International Symposium on Robotics Research, Sestri Levante (2015)
Kovac, M., Germann, J., Hurzeler, C., Siegwart, R., Floreano, D.: A perching mechanism for micro aerial vehicles. J. Micro-Nano Mechatron. 5(3–4), 77–91 (2010)
Hunt, G., Mitzalis, F., Alhinai, T., Hooper, P., Kovac., M.: 3D printing with flying robots. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 4493–4499 (2014)
Desbiens, A.L., Pope, M.T., Christensen, D.L., Hawkes, E.W., Cutkosky, M.R.: Design principles for efficient, repeated jumpgliding. Bioinspiration Biomimetics 9(2), 025009 (2014)
Vidyasagar, A., Zufferey, J.-C., Floreano, D., Kovac, M.: Performance analysis of jump-gliding locomotion for miniature robotics. Bioinspiration Biomimetics 10(2), 025006 (2015)
Siddall, R., Kovac, M., Kennedy, G.: High power propulsion strategies for aquatic take-off in robotics. In: International Symposium on Robotics Research. Springer, Heidelberg (2015). ISSN:1610-7438
Meadows, G., Atkins, E., Washabaugh, P., Meadows, L., Bernal, L., Gilchrist, B., Smith, D., VanSumeren, H., et al.: The flying fish persistent ocean surveillance platform. In: AIAA Unmanned Unlimited Conference (2009)
Roberts, J., Zufferey, J., Floreano, D.: Energy management for indoor hovering robots. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1242–1247 (2008)
Yanagimura, K., et al.: Hovering of MAV by using magnetic adhesion and winch mechanisms. In: IEEE Conference on Robotics and Automation, pp. 6250–6257 (2014)
Prahlad, H., et al.: Electroadhesive robots - wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3028–3033 (2008)
Estrada, M.A., Hawkes, E.W., Christensen, D.L., Cutkosky, M.R.: Perching and crawling: design of a multimodal robot. In: IEEE International Conference on Robotics and Automation (ICRA) (2014)
Wang, L., Culha, U., Iida, F.A.: Dragline-forming mobile robot inspired by spiders. Bioinspiration Biomimetics 9(1), 016006 (2014)
Lindsey, Q., et al.: Construction of cubic structures with quadrotor teams. Autonom. Robots 33(3), 323–336 (2012)
Augugliaro, F., et al.: Building tensile structure with flying machines. In: International Conference on Intelligent Robots and Systems (2013)
Stuart-Smith, R.: Behavioural production: autonomous swarm-constructed architecture. Archit. Des. Spec. Issue: Parametricism 2.0: Rethinking Architecture’s Agenda for the 21st Century 86(2), 5459. Wiley, Chichester (2016)
Woodward, M., Sitti, M.: MultiMo-Bat: a biologically inspired integrated jumping–gliding robot. Int. J. Robot. Res. 33(12), 1511–1529 (2014)
Kovac, M., Hraiz, W., Fauria, O., Zufferey, J.C., Floreano, D.: The EPFL jumpglider: a hybrid jumping and gliding robot with rigid or folding wings. In: IEEE International Conference on Robotics and Biomimetics, pp. 1503–1508 (2011)
Graule, M.A., Chirarattananon, P., Fuller, S.B., Jafferis, N.T., Ma, K.Y., Spenko, M., Kornbluh, R., Wood, R.J.: Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion. Science 352(6288), 978–982 (2016)
Pope, M.T., Kimes, C.W., Jiang, H., Hawkes, E.W., Estrada, M.A, Kerst, C.F., Roderick, W.R, Han, A.K., Christensen, D.L., Cutkosky, M.R.: Robust perching and climbing using microspines on vertical outdoor surfaces. In: IEEE Trans. Robot. (in review)
O’Dor, R., Stewart, J., Gilly, W., Payne, J., Cerveira Borges, T., Thys, T.: Squid rocket science: how squid launch into air. Deep Sea Res. Part II 95, 113–118 (2012)
Acknowledgments
This research is partially funded by the UK Engineering and Physical Sciences Research Council (EPSRC). Talib Alhinai thanks the Abu Dhabi Investment Authority (ADIA) for financial support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Sareh, S., Siddall, R., Alhinai, T., Kovac, M. (2017). Bio-inspired Soft Aerial Robots: Adaptive Morphology for High-Performance Flight. In: Laschi, C., Rossiter, J., Iida, F., Cianchetti, M., Margheri, L. (eds) Soft Robotics: Trends, Applications and Challenges. Biosystems & Biorobotics, vol 17. Springer, Cham. https://doi.org/10.1007/978-3-319-46460-2_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-46460-2_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-46459-6
Online ISBN: 978-3-319-46460-2
eBook Packages: EngineeringEngineering (R0)