
Abstract
Within this paper a novel gripper is introduced. The gripper is based on a tensegrity mechanism with multiple states of self-equilibrium. These tensegrity mechanism is built upon a mechanical compliant tensegrity structure, consisting of tensile and compressive members. The existence, shape and stability of the different states of self-equilibrium depend on the parameters of the members. After investigating this dependency with a form-finding algorithm the structure is extended with additional members to obtain a two-finger-gripper. The equilibrium configurations represent the opened and the closed state of the gripper. Due to the several equilibrium configurations, the control of the gripper can be realised easily and is discussed with theoretical analyses. The working principle of the gripper and the mechanical compliance is verified by a prototype. In addition, as an outlook for further works, a miniaturised prototype of the tensegrity mechanism with two stable states of self-equilibrium has been built.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Compliant tensegrity structure
- Compliant gripper
- Multiple states of self-equilibrium
- Gripper application
1 Introduction
In the field of robotics the use of prestressed mechanically compliant mechanisms is a recently discussed topic. Tensegrity mechanisms, based on mechanical compliant tensegrity structures, are an example of such mechanisms. Tensegrity structures consist of groups of not directly connected compressive members, connected by a continuous net of tensile members (Motro 2003; Pugh 1976).
Robots based on tensegrity mechanisms are lightweight, deployable, have a simple system design, shock absorbing capabilities and a very high strength to weight ratio (Ashwear 2015; Böhm and Zimmermann 2013; Caluwaerts et al. 2014; Rieffel et al. 2010). These are great advantages for the use of tensegrity mechanisms in robot applications. But these properties result in a large control effort. An overview about recent developments can be found in Boehler et al. (2015), Böhm et al. (2015), Mirats Tur and Hernandez (2009), Skelton and De Oliveira (2009).
Known robots based on tensegrity structures are using conventional tensegrity structures with only one state of self-equilibrium. A special property of tensegrity mechanisms is that they may have multiple states of self-equilibrium (equilibrium configurations). These tensegrity structures are called multistable tensegrity structures. In literature only few structures of this kind were previously reported (Defossez 2003; Micheletti 2013; Xu and Luo 2011). If the members have a pronounced elasticity it may be possible to change between the equilibrium configurations. This means to change the shape of the tensegrity structure with small control effort, which is an advantage compared to the conventional tensegrity structures. The consideration of multistable compliant tensegrity structures is an attractive new research topic.
In the present article a planar multistable tensegrity structure is discussed and the possible use of these structures in gripper applications is introduced. Some of the results are already discussed in Sumi et al. (2016). In this article the tensegrity structure and the gripper-application are investigated more detailed.
The presented multistable tensegrity structure has two stable equilibrium configurations. These two equilibrium configurations correspond to the opened and closed states of the gripper. Due to the design, the gripping force results only from the prestress of the structure.
A first, in Sect. 2, the topology of the tensegrity mechanism is considered and the equilibrium configurations in dependency of the parameters of the members are discussed. Then gripper arms are added to the tensegrity mechanism and different kinds of actuation are introduced. In Sect. 3, experimental results are presented and finally Sect. 4 is devoted to conclusions and further research directions.
2 Theory
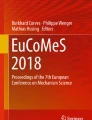
The tensegrity structure consists of three members of high axial stiffness (members 1–3) and six members of low axial stiffness (members 4–9). The topology is shown in Fig. 1.

Topology, members’ parameters and three possible stable equilibrium configurations of the considered planar tensegrity structure
The following theoretical analyses (including the form-finding procedure) are performed with the static Finite Element Method including geometric nonlinearity.
All members are massless 2D linear spring elements with constant axial stiffness (parameters of the members: ki—axial stiffness, L0i—free length). For the element stiffness matrix see Guest (2006).
The characteristic equation is
with {F({u})} vector of nodal forces, {u} vector of nodal displacements, [K({u})] tangent stiffness matrix. This Eq. (1) is solved with an incremental-iterative procedure with the geometric boundary conditions: ux1 = uy1 = uy2 = 0 mm. The static stability of the equilibrium configurations is determined with the help of the eigenvalues of [K({u})], see Zhang and Ohsaki (2015).
If the members’ parameters are properly selected, the tensegrity structure has three stable equilibrium configurations, see Fig. 1 A, B and C. For more detailed information how these parameters are selected, see Böhm et al. (2016). All members of high axial stiffness are compressed and all members of low axial stiffness are tensioned, in all three configurations. There are two groups of compressed members (member 1 as the first, members 2 and 3 as the second), which are only indirectly connected with tensile members, so it is a tensegrity mechanism, indeed. Since there are member 2 and 3 directly connected, it’s a class 2 tensegrity structure (Skelton et al. 2001).
In the following only equilibrium configurations A and B are considered. These two configurations are needed for the specific application.
2.1 Equilibrium Configurations
A study of the equilibrium configurations is presented in this section. The equilibrium configurations, their existence, shape and stability depend on the parameters of the members (stiffness and free length). This is shown by an example, where some of the parameters of the members are changed and the equilibrium configurations are investigated.
The considered tensegrity structure, with the parameters from Fig. 1, has three stable equilibrium configurations A, B and C. As mentioned above, only A and B are considered in the following.
Within this example the free lengths of the tensile members 4 and 7 and of the tensile members 5 and 6 are varied: L04 = L07 = 40, …, 80 mm, L05 = L06 = 40, …, 80 mm with a step size of 0.3 mm. In order to disturb the symmetry, the stiffnesses of the tensile members 8 and 9 are set to 0.25 and 0.3 N/mm, respectively. All other parameters are chosen as listed in Fig. 1.
Both equilibrium configurations have to be identified. This may be done with the help of the coordinates of the nodes, which are obtained by the algorithm described above. For A and B the inequalities |x5 − x3| < ε, |y3 + y5| < ε (node 3 and 5 are on the same x-position and have the same distance to member 1 according to the y-direction) have to be satisfied, where ε denotes a computational tolerance. Furthermore, node 3 lies off the x-axis: |y3| > δ, where δ = 1 is chosen within this example. The difference of both A and B is defined by the relative position of node 3 and 4: for equilibrium configuration A x3 − x4 > δ and in contrast, x4 − x3 > δ for B.
The results are depicted in Fig. 2 and show: The parameter ranges, for which A or B are stable (white) or unstable (grey) equilibrium configurations, are different. There are regions, where some compressive members are tensioned and some tensile members are compressed, see shaded regions in Fig. 2. The parameter range, where A and B are stable equilibrium configurations with the requested prestress state (compressed or tensioned) of the members is small.

Existence and stability of equilibrium configurations A and B, depending on parameters of the members. Black Equilibrium configuration does not exist or no convergent result; White/grey Stable/unstable equilibrium configuration; Shaded At least one member hasn’t the requested prestress state
Within this example, only two different parameters are changed, in order get a result that can be visualized easily. If one of the fixed parameters had a different value, it could be possible that never both equilibrium configurations exist or that never both equilibrium configurations are stable. A corresponding example is presented in Fig. 3. There is only one modification of the example above, the stiffnesses of the tensile members 8 and 9 are set to 0.1 and 0.7 N/mm, respectively. As a result, there are values for L04 = L07 and L05 = L06, where equilibrium configuration A exists and is stable, and there are values, where B exists and is stable. But it’s not possible to have values for L04 = L07 and L05 = L06 within the interval [30 mm, 80 mm] so that both A and B are existing and stable.

Existence and stability of equilibrium configurations A and B, depending on parameters of the members. Black Equilibrium configuration does not exist or no convergent result; White/grey Stable/unstable equilibrium configuration
In conclusion: The parameters of the members have to be chosen carefully to get the two stable equilibrium configurations A and B.
2.2 Gripper Arm Design
According to the mentioned application, there may be gripper arms added to the tensegrity structure. Then the equilibrium configurations A and B represent the opened and the closed state of the gripper, respectively.
In a simple case stiff gripper arms are fixed connected to the compressive members 2 and 3. In Fig. 5 (first row) the opened and the closed state and the change between the states are depicted. It can be observed, that the space requirement in the opened state is large. This can be prevented, if an additional joint and two additional tensile members are added. This variant will be discussed more detailed, in the following.
The tensegrity structure is extended, as shown in Fig. 4, left. The thick lines represent members with a high stiffness (compressive members) and the thin lines represent members with a small stiffness (tensile members). In the form-finding procedure, all members are connected with pin-joints. In the considered design variant the connections of members 2 and 10, and of members 3 and 11 have to be stiff. Additional the connection of members 14, 12 and 18 and of the three members 15, 13 and 19 has to be stiff. For that reason, there have to be added truss frameworks to the structure for the used algorithm. The truss frameworks are depicted in Fig. 4, right. The added members are members with high stiffness.

Construction of the gripper arms and the truss frameworks that are needed for the calculation
The parameters of the members are determined, so that member 14 (15) is parallel to member 5 (6), in the closed state of the gripper and so that member 14 and 15 are parallel to member 1, in the opened state of the gripper.
To achieve a larger gripping-force, there may be pin-joints with a limited rotational range used in node 6 and 7. Using these modified joints the angle between member 10 and 18 (11 and 19) cannot get smaller than needed in the closed state of the gripper. With this modification the gripping-force depends only on the underlying tensegrity structure. Another positive aspect of these modified joints is, that members 16, 17, 20 and 21 may have lower stiffnesses than the other members with a low stiffness in the underlying tensegrity structure. They have to be only as strong as needed to compensate the weight force of the gripper arms.
The opening of the gripper is depicted in Fig. 5, lower row. It can be observed, that the space requirement is lower than in the first variant (first row).

Two variants to realise the gripper arms and the transition between the closed and the opened state of the gripper
2.3 Actuation
Actuation of the gripper means to open and to close the gripper, which is the transition between equilibrium configuration A and B. There are many different possible principles to actuate the gripper:
-
Change the relative position between selected members
-
Change the prestress of selected members (by changing stiffnesses and/or lengths)
-
Change the position of selected members.
For all three principles are examples depicted in Fig. 6. In the left variant, the angle between the members 2 and 3 is changed. In the second variant, the stiffnesses of member 8 (to close the gripper) and 9 (to open the gripper) are changed. And in the right variant, node 4 is moved along the x-axis.

Different types of actuation
The third variant of actuation is considered in the following, as an example. While altering the position of node 4 along the x-axis with an actuation force, there is a snap-through between the equilibrium configurations (both from A to B and from B to A). The relation between the actuation force at node 4 (F4x) and the position of node 4 (x4) is depicted in Fig. 7. It is shown for seven different states of prestress. For the coloured line, the parameters of the members are chosen as listed in Fig. 1 and described in Sect. 2.2. For the other plots is satisfied: Brighter lines mean a higher prestress of the system and darker lines stand for a lower prestress. To change the prestress, the stiffnesses of all members are scaled by the same factor.

It can be seen (Fig. 7), that the change of the prestress does not change the form of the equilibrium configurations A and B (see F4x = 0 N). The position of node 4, where the snap-through takes place, xopen, xclose, is the same for the different states of prestress. But the amount of force (Fopen, Fclose) that is needed to reach these positions (xopen, xclose) depends on the state of prestress. If the prestress is higher (brighter lines in Fig. 7), the amount of force is larger.
This shows, that the mechanical compliance of the gripper can be controlled by the level of prestress of the system.
To maintain the mechanical compliance of the gripper during actuation, the actuator (e.g. a linear servomotor) is coupled with node 4 by a connecting piece, containing an elongated hole. During actuation at the snap-though-position (xopen or xclose) the actuator may stop and the gripper snaps into the other state and node 4 snaps to the other side of the elongated hole. This process is schematically depicted in Fig. 8. The elongated hole shall be longer than needed, to ensure that node 4 does not clash with the connecting piece.

Actuation of the gripper realised by a connecting piece with an elongated hole to preserve the snap-through-effect
Due to this realisation, the maximal force needed for the actuation is 5.4 N and the minimal force is −4.2 N. To hold the gripper in its opened or closed state no energy is needed. The mechanical compliance is preserved, although there is an actuator used, which is not compliant.
3 Experiments
The introduced gripper has been built to verify the theoretical results. The parameters from Fig. 1 are used (free lengths and axial stiffnesses of the springs, lengths of the compressive members). Since it is a planar tensegrity structure, it has to be slightly modified to be able to build it (e.g. member 1 and 8 lie in the same plane, which is not possible within a prototype) and to ensure spatial stability. For this reason, member 2–9 have been doubled, see Fig. 9.

Top Isometric view of the prototype; Bottom The gripper in opened and closed state with a gripped object (40 mm × 54 mm × 49 mm)
The actuation is realised, like presented in Fig. 8, with a Linear DC-Servomotor (LM 2070-080-01, Faulhaber Inc.), with max. peak/continuous forces of 27.6 N/9.2 N, with a stroke length of 80 mm and with a max. speed of 2.3 m/s. The connecting piece has an elongated hole with a length of 30 mm (see Fig. 9).
The functionality of the system has been proven by preliminary tests. The gripper may grip objects with a width up to 60 mm and has a maximal gripping force of approximately 2 N.
The process to open and to close the gripper is shown in Fig. 10.

Process to open (top row, left to right) and to close (bottom row, left to right) the gripper
The gripper has a high mechanical compliance, which is depicted in Fig. 11. Due to this property it is possible to grip objects that are eccentrically positioned. While moving the gripper, small obstacles don’t harm the movement.

Demonstration of the mechanical compliance of the gripper
As a first step for further development in the direction of miniaturisation, another prototype of the tensegrity structure has been build. It is shown in Fig. 12. Member 1 has a length of approximately 70 mm and members 2 and 3 of 30 mm. In this prototype the tensile elements are merged to a continuous monolithic net made of silicone elastomer. This design method enables the further realisation of miniaturised grippers based on the introduced principle.

Two stable equilibrium configurations of a multistable tensegrity structure with a monolithic net of tensile elements made of silicone elastomer
4 Conclusions
In this article a new design principle of compliant grippers based on tensegrity mechanisms with multiple states of self-equilibrium is presented. It is possible to build compliant grippers based on structures with pronounced elasticity. Grippers based on tensegrity mechanisms with multiple states of self-equilibrium have several advantages, e.g. simple system design and small control effort. To meet the needs of a selected application only few system-parameters have to be customized.
Additional a smaller version of the tensegrity mechanism has been built to show the possibilities of further miniaturisation.
Future work will focus on the miniaturisation of tensegrity mechanisms (for gripper applications and robotic applications). Further topologies for tensegrity mechanisms with multiple states of self-stress will be investigated. The realisation of systems with tuneable performance (compliance, gripping force) by adjusting their prestress will be considered. Alternative actuation techniques will be tested.
References
Ashwear N, Tamadapu G, Eriksson A (2015) Optimization of modular tensegrity structures for high stiffness and frequency separation requirements. Int J Solids Struct 80:297–309
Boehler Q, Charpentier I, Vendrines MS et al (2015) Definition and computation of tensegrity mechanism workspace. J Mech Robot 7(4):4, paper No: JMR-14–1168,
Böhm V, Zimmermann K (2013) Vibration-driven mobile robots based on single actuated tensegrity structures. In: Proceedings of the IEEE international conference on robotics and automation, pp 5455–5460
Böhm V, Zeidis I, Zimmermann K (2015) An approach to the dynamics and control of a planar tensegrity structure with application in locomotion systems. Int J Dyn Control 3(1):41–49
Böhm V, Sumi S, Kaufhold T et al (2016) Compliant multistable tensegrity structures with simple topologies. In: Proceedings of the 6th European conference on mechanism science 2016
Caluwaerts K, Despraz J, Iscen A et al (2014) Design and control of compliant tensegrity robots through simulation and hardware validation. J Roy Soc Interf, 11
Defossez M (2003) Shape memory effect in tensegrity structures. Mech Res Commun 30(4):311–316
Guest S (2006) The stiffness of prestressed frameworks: a unifying approach. Int J Solids Struct 43(3–4):842–854
Micheletti A (2013) Bistable regimes in an elastic tensegrity system. In: Proceedings of the royal society A, vol 469, no 2154
Mirats Tur JM, Hernàndez S (2009) Tensegrity frameworks: dynamic analysis review and open problems. Int J Mech Mach Theory 44(1):1–18
Motro R (2003) Tensegrity: structural systems for the future. Kogan Page Science, London and Sterling
Pugh A (1976) An introduction to tensegrity. University of California Press
Rieffel JA, Valero-Cuevas FJ, Lipson H (2010) Morphological communication: exploiting coupled dynamics in a complex mechanical structure to achieve locomotion. J Roy Soc Interf 7:613–621
Skelton RE, De Oliveira MC (2009) Tensegrity systems. Springer, Berlin
Skelton RE, Adhikari R, Pinaud JP et al (2001) An introduction to the mechanics of tensegrity structures. In: The mechanical systems design handbook: modeling, measurement, and control. CRC Press, Boca Raton
Sumi S, Böhm V, Schale F et al (2016) Compliant gripper based on a multistable tensegrity structure. In: Proceedings of the 6th European conference on mechanism science 2016
Xu X, Luo Y (2011) Multistable tensegrity structures. J Struct Eng 137(1):117–123
Zhang JY, Ohsaki M (2015) Tensegrity structures—form, stability, and symmetry. Springer, Berlin
Acknowledgments
This work is supported by the Deutsche Forschungsgemeinschaft (DFG project BO4114/2-1).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Sumi, S., Böhm, V., Schale, F., Roeder, R., Karguth, A., Zimmermann, K. (2017). A Novel Gripper Based on a Compliant Multistable Tensegrity Mechanism. In: Zentner, L., Corves, B., Jensen, B., Lovasz, EC. (eds) Microactuators and Micromechanisms. Mechanisms and Machine Science, vol 45. Springer, Cham. https://doi.org/10.1007/978-3-319-45387-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-45387-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45386-6
Online ISBN: 978-3-319-45387-3
eBook Packages: EngineeringEngineering (R0)