
Abstract
Drill-string vibration is one of the major causes for a deteriorated drilling performance. It is crucial to understand the complex vibrational mechanisms experienced by a drilling system in order to better control its functional operation and improve its performance. This work is devoted to modeling of nonlinear dynamics of the drill-string taking into account initial curvature and finiteness of deformations. The drill-string is considered as a one-dimensional rod of a symmetric cross-section compressed by an axial force applied at the top end of the rod. The equation of motion is derived using the theory of finite deformations of V.V. Novozhilov and the Hamilton–Ostrogradsky’s variational principle. The initial curvature is modelled as a random shape that can be approximated by a finite series of smooth functions. All numerical calculations are carried out in the environment of symbolic mathematical computations—Wolfram Mathematica. The obtained results allow to study the influence of initial curvature on excited flexural vibrations in the drill-string in order to improve its performance and avoid of severe and destructive oscillations.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Intensive development of the Earth’s interior is characterized by the growth of oil and natural gas production. Construction of vertical wells by drilling is the most widespread way of production of oil products in countries with developed mining industry. It is safe and effective in a variety of geological conditions. However, the practice of construction of oil and gas wells shows that there are cases when there are some factors, which jeopardizes the possibility of its use. One of these factors can be geometrical imperfections of structural elements.
As mentioned in [1] the real structural elements can have an initial curvature, for this reason attached forces act with a certain eccentricity. These factors can significantly affect the behavior of the system. The study of such systems with initial imperfections is important, first of all, from a practical side as allows us to approach mathematical models to real structures. Of course the listed factors are usually random, therefore reasonably it is possible to estimate their effect only with attraction of statistical methods.
Theoretical study of influence of initial imperfections on the dynamic behavior of the structure is developing in two directions. The first direction—deterministic, based on the fact that the amplitude and shape of the initial geometric imperfections are known for each case. The second direction—it is assumed that the initial perturbations are random field [2, 3]. In this paper the nonlinear dynamics of a drill-string with a random shape of initial curvature is investigated.
2 Problem Statement
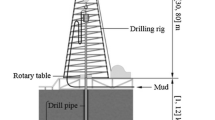
The problem of flat bending of the drill-string of length l with an initial curvature is studied. The drill-string is considered as an isotropic rod of circular cross-section compressed by an axial force N(t) applied at the top end of the string. Due to the small cross-sectional size relative to the length of the drill-string, it is represented as one-dimensional rod where the axis of OZ is directed along a rod axis.
The model of elastic deformation of the drill-string is based on the nonlinear theory of elasticity of Novozhilov [4]. The second system of simplifications by V.V. Novozhilov and the hypothesis of flat cross-sections is applied to components of strain tensor. According to the last cross sections of the rod at deformation remain flat and perpendicular to its deformed axis, and normal tension on planes parallel to the rod axis are negligible. In this case, equations of elastic displacements, relative elongations and rotation angles of the rod elements have the form:
where \( U\left( {x,y,z,t} \right),V\left( {x,y,z,t} \right),W\left( {x,y,z,t} \right) \)—displacement components along the axes OX, OY, OZ, respectively; \( u(z,t) \)—a complete bending that occurs during deformation; \( u_{0} (z) \)—initial curvature.
The functional of elastic deformation have the form:
where \( \nu \)—Poisson’s ratio, \( e_{xx} ,e_{yy} ,e_{zz} \)—relative elongations parallel to the axes OX, OY, OZ, respectively; \( e_{xy} ,e_{yz} ,e_{zx} \)—shifts; \( \omega_{x} ,\omega_{y} ,\omega_{z} \)—rotation angles around respective axes.
To derive the main differential equations of movement defining transverse displacements of the drill-string, relative to its initial undeformed position, methods of the variation principle of Ostrogradsky-Hamilton is used [5].
The potential energy of deformation is defined as follows:
The potential of external loading is defined as work of the external loading force on mutual shift of the ends of the rod to the direction of force of N. Then the potential of external loading have the form:
The kinetic energy of the rotating rod in global system of coordinates is defined as follows:
where F—area of cross section of the drill-string, J—axial moment of inertia.
Applying the variational principle of Ostrogradsky-Hamilton:
the main equation of movement of the drill-string is obtained:
where E—Young’s modulus.
The equation of movement (7) has the nonlinear character caused by geometrical nonlinearity of the drill-string and consider the influence of its initial curvature on behavior of the system.
3 Solution Method and Shape of an Initial Curvature
Well known the Bubnov-Galerkin’s variational method of separation of variables was used to determine the solution of (7) with a simply-supported boundary conditions. In [6] has been shown that this method allows to successfully analyze the behavior of drill-strings used for oil production in the vertical and deviated wells. According to the Bubnov-Galerkin’s method the solution of the system is defined as:
where f i (t)—unknown functions of time, \( \sin \left( {i\pi z/l} \right) \)—modes of flexural vibrations of the rod.
It is obvious that initial curvature has the smooth form. Thus, it can also be represented as the same series of trigonometric functions. Considering that it guessed that the initial curvature has a random shape it assumed the coefficients of the trigonometric series have a random character.
where A i (ξ)—are independent Gaussian random coefficients.
After substitution of the series (8), (9) in Eq. (7) the nonlinear system of differential equations of the second order with respect to the unknown functions f i (t) is obtained.
4 Numerical Results
The implementation of the Bubnov-Galerkin method and the further numerical solution were made in the applied program for symbolic computation—Wolfram Mathematica 10. The stiffness switching method was applied to implement the numerical solution of the equations.
Numerical calculations were carried out for the steel drill-string at the following values of parameters: E = 2.1 × 105 MPa, ρ = 7800 kg/m3, ν = 0.28, outer diameter of the rod D = 0.2 m, inner diameter d = 0.12 m, F = 2.01 × 10−2 m2, N = 2.2 × 103 N, J = 6.84 × 10−5 m4, l = 200 m. In addition, it is assumed that a compressive load is constant and distributed along the length of rod.
Calculations were carried out up to 12 modes and it can be seen that the main contribution to the dynamics of vibrations make the first modes. With the growing number of modes its contribution is reduced (Fig. 1). Moreover, if there is no the initial curvature it can be shown that the flexural vibrations will not appear on the even modes [1]. Figure 2 shows four simulations at fixed cross-section (z = 0.5 l), where u 1(t) solution of (7) in case of no initial curvature and other u 2(t), u 3(t), u 4(t) are solutions with random shape of curvature. Maximum of amplitudes of random shapes lie in the range from 0.5 to 2 cm. Figures 3 and 4 show the same solutions along the entire length at t = 200 s and t = 600 s, respectively. It can be seen that a small initial curvature slightly affects the amplitude of vibration of the system, but it considerably affects the frequency characteristics.

First five modes at fixed cross-section

Four simulations at fixed cross-section

Four simulations along the entire length at t = 200 s

Four simulations along the entire length at t = 600 s
5 Conclusions
In this paper the spatial movement of compressed drill-strings with no restrictions on the size of their deformations was modelled. The model is based on application of the Ostrogradsky-Hamilton variation principle and the theory of finite deformations of V.V. Novozhilov. The Bubnov-Galerkin method was applied for converting the original system of nonlinear equations with distributed parameters in a system of nonlinear ordinary differential equations. The initial curvature is modelled as a random shape approximated by a finite series of trigonometric functions. The calculation procedure of the mathematical model was developed and implemented in the environment of Wolfram Mathematica 10.
It was observed that small initial curvature leads to slightly increasing of the amplitude of vibrations and considerably affects the frequency characteristics of the system, thereby there is no destructive oscillations. However, the picture could change significantly if we consider the real initial curvature of structural elements. Nevertheless, the developed approach will allow to estimate it, it is only need to make other assumptions about the nature of distribution of random coefficients based on statistical data. This may serve as further development of this work. It is also planned to consider the non-flat case when the drill-string is rotating at a constant angular velocity.
References
Sergaliyev, A., Umbetkulova, A.: Numerical simulation of drill-string dynamics with an initial curvature. Appl. Mech. Mater. 799–800, 523–527 (2015)
Wenbin, Y., Hodges, D.H., Volovoi, V., Cesnik, C.E.S.: On Timoshenko-like modeling of initially curved and twisted composite beams. Int. J. Solids Struct. 39, 5101–5121 (2002)
Kala, Z.: Stability problems of steel structures in the presence of stochastic and fuzzy uncertainty. Thin-Walled Struct. 45, 861–865 (2007)
Novozhilov, V.V.: Foundations of the Nonlinear Theory of Elasticity. OGIZ, M.-L (1948)
Kudaibergenov, A., Kudaibergenov, A., Khajiyeva, L.: Stability analysis of drill rods as shells in the gas stream. Appl. Mech. Mater. 665, 593–596 (2014)
Vaz, M.A., Patel, M.N.: Analysis of drill strings in vertical and deviated holes using the Galerkin technique. Eng. Struct. 17, 437–442 (1995)
Acknowledgments
This research work has been done within the framework of the “Development of nonlinear dynamic models of deformable media and their practical application for solution of drilling problems in oil and gas industry taking into account ambiguities, complicating factors and influence of the environment” scientific project (2015–2017), funded by the Ministry of Science and Education of the Republic of Kazakhstan.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Sergaliyev, A.S., Khajiyeva, L.A. (2017). Flat Flexural Vibration of Drill-String with an Initial Curvature. In: Beran, J., Bílek, M., Žabka, P. (eds) Advances in Mechanism Design II. Mechanisms and Machine Science, vol 44. Springer, Cham. https://doi.org/10.1007/978-3-319-44087-3_30
Download citation
DOI: https://doi.org/10.1007/978-3-319-44087-3_30
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-44086-6
Online ISBN: 978-3-319-44087-3
eBook Packages: EngineeringEngineering (R0)