
Abstract
In this paper developed the analytical methods of research that used in industrial separation method for the technical rotor installation used for treating a suspension. In this work, the rotor is installed symmetrically to the bearings, on a flexible shaft, and rotates with the angular velocity. The rotor is a round disk on which the cups (tubes) with the suspension are hung symmetrically at a certain distance from the spinning axis. Tubes are rotatable around its horizontal axis. The rotor position is determined relative to a fixed coordinate system. The position of the sample suspension particle is determined relative to the moving coordinate system, coupled with a rotating cup (tube). Angular spin rate of rotor is high enough to ignore the suspension gravitation force, which is much smaller than the centrifugal force. In addition, the shape of the particle is spherical; particle mean free path is much larger than its size; suspension turbulence is absent (laminar mode); the interaction forces between the particles and the walls of the cup (tube) are absent; cup (tube) is quite narrow (diameter ≪ length); after settling of on the walls of the cup the particles stop their motion; the friction force between the cups and their axis of rotation are ignored; the friction force between the solid particle and the wall of the cup is also ignored. In contrast to other researcher’s papers, in which the particles are moving only in the cup axis, this paper explores the spatial motion of a suspension particle. Suspended containers are symmetrically arranged relative to each other; however, the mass of suspension in them may be different. The number of fine particles in them may not be equal, and the time of particle precipitation differs. All of these factors are the cause of imbalance in the rotor system. For practical use of mathematical model are offered the individual cases and their solutions, which are often encountered in practice. For individual cases, determined the conditions of stability of rotor system using the method of complex amplitudes.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Centrifugation method is widely used in many fields of technology and industry. Separation method is particularly widely used in the fields of medicine, biology, chemical and agricultural industries. For example, to study the material composition of ores and soil samples are often used for the separation. Centrifugation is commonly called emulsions separation emulsions [1–3]. This process is carried out in a continuous wall with rotors and can be compared with the process of sedimentation in the gravity field of emulsions. Examples of this process are the separation of the cream from the milk, the water from lubricating oils, separation of massecuite, etc. [4, 5]. Many mathematical models in describing the motion of solids emulsions were limited to the study of planar motion [6–8], which does not give a complete picture of the process. Also, experimental studies [9, 10] show the importance of taking into account fluctuations and their effect on the mechanical system as a whole. In this regard, it was built a number of different analytical and numerical models [11, 12] to describe these processes.
2 Statement of the Problem and the Equations of Motion
The rotor is mounted symmetrically about the supports on the flexible shaft, rotating with the angular velocity \( \omega \). The rotor is a circular disc on which at certain distances from the axis of rotation symmetrically suspended containers with suspension.
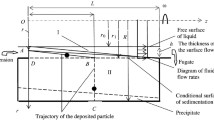
Containers are can rotate around its horizontal axis (Fig. 1). The angle of rotation is determined by the container from a vertical angle \( \alpha \); \( {\Omega} = \dot{\alpha } \)—the angular speed of rotation of the containers, \( L_{cm} \)—distance from the rotor axis to the axis of rotation of containers, \( L_{M} \)—distance to the particles of the suspension M with a mass \( {\Delta} m \), \( r \)—containers radius, \( g \)—acceleration of gravity, \( L \)—containers length.

Scheme the rotor system and disc with containers
The rotor position is determined relative to a fixed coordinate system \( O_{1} x_{1} y_{1} z_{1} \) (Fig. 1). The position of the studied particles M is determined by the relative moving coordinate system \( Oxyz \). \( Oy \) axis is directed along the axis of symmetry of the container bottom, an \( Oz \) axis directed along the rotational axis of the container.
In the calculation the following assumptions were used:
-
(1)
the angular speed of the rotor is large enough so that we can ignore the force of gravity suspension (\( g \ll \omega^{2} \));
-
(2)
spherical shape of particles assumed;
-
(3)
particle mean free path is much larger its size;
-
(4)
no turbulence suspension (laminar flow);
-
(5)
the interaction forces between the particles and the walls of the container (test tube) absent;
-
(6)
container (test tube) is rather narrow radius is much smaller than its length (\( r_{0} \ll L \));
-
(7)
after deposition of the particles on the wall of the container stop moving;
-
(8)
the friction force between the containers and their axes of rotation, as well as a change in gravity from the suspensions disregarded containers;
-
(9)
the force of friction between the solid particles and the container wall disregarded.
Unlike other studies [1, 8, 13], where the movement of the particles only axis of the container, in this paper we investigate the three-dimensional motion of a particle M.
After determining the acceleration vector of the portable moving coordinate system
represent the equation of motion of the particle M in the suspension, taking into account transportation and Coriolis forces of inertia and the assumptions made in the form of:
where \( r_{0} \)—suspensions particle radius with a mass \( {\Delta} m \); \( \eta \)—dynamic viscosity of the fluid (suspension); \( 6\pi \eta r_{0} \)—friction coefficient of the particle M (coefficient of force environmental resistance) during its movement.
The system (2) is especially nonlinear, since \( \omega = \omega (t),\alpha = \alpha (t), \Omega = {\Omega} (t) \). Moreover the angle of rotation of the container \( \alpha (t) \) included in the arguments of trigonometric functions. In view of the above system (2) of the exact solution does not.
Let us consider the special cases.
1. The rotor is rotated at a constant angular speed,\( \omega = const \), that is \( \alpha \ne 0 = const \), \( \dot{\alpha } = {\Omega} = 0 \). At first we define the dependence of the angle \( \alpha \) of the angular speed of the rotor \( \omega \). For this purpose, we draw up the balance of forces acting on the container (pиc.3). Projecting force in the direction of \( \tau \tau \) we get (Fig. 2)
where l—distance from the axis of rotation to center of gravity of the container with a suspension of. From here it follows that

Determination of forces
If \( \omega \to \infty ,\;\alpha \to \frac{\pi }{2} \) or \( \alpha \to \frac{\pi }{2},\;\omega \to \infty \). i.e. if \( \alpha \to \frac{\pi }{2} \) \( \omega \to \infty \), which follows from the physical meaning of the problem. From (3) we find the dependence of the angular speed \( {\Omega} \) of the container in \( \omega ,\alpha \), and other system parameters.
where \( \varepsilon = \dot{\omega } \). Case of indefinite increase of angular velocity \( \omega \to \infty \) the angular speed of the container goes to zero \( {\Omega} \to 0 \). As is shown above, if \( \omega \to \infty ,\; \alpha \to \frac{\pi }{2} \); these conclusions are valid, when the angular speed of the rotor increases homogeneous.
The maximum value of the angular velocity of the container we find the angular speed of the rotor. We then obtain
It follows, that when \( \alpha \to \frac{1}{4l}(\sqrt {L_{cm}^{2} + 8l^{2} } - L_{cm} ) \), the angular velocity increase without limit.
Hence, each value of \( \omega \) corresponds to the specific value of \( \alpha \). Then from (2) as \( \omega = const,\quad\alpha = const,\quad{\Omega} = 0,\quad\varepsilon = 0 \) we will have
where \( n = 3\pi \eta r_{0} \)—friction coefficient. From (6), equating coefficients of the same functions of time \( \exp( - \alpha_{0} t) \) and the constant terms, is possible get the system of algebraic equations for the unknown \( B_{1} ,B_{2} ,B_{0} ,P_{1} ,P_{2} ,P_{3} \), which solution has the form
Considering (7) can be written law of motion of the particle suspensions
Using the initial conditions of the problem, we find the integration constants \( A_{1} ,A_{2} ,C_{0} ,C_{1} ,E_{1} ,E_{2} \). For determining \( A_{1} ,A_{2} ,C_{0} ,C_{1} \) we have four algebraic equations:
The system of algebraic equations (10) and (11) are solved without difficulty.
Let us write the final value:
where
From (22) we find the velocity of the particle suspensions in the direction of the Oy axis:
If we consider that \( \beta_{1} - \alpha_{0} = n + \sqrt {n^{2} + \omega^{2} } - 2n = - n + \sqrt {n^{2} + \omega^{2} } = \alpha_{1} \), \( \alpha_{1} + \beta_{1} = 2\sqrt {n^{2} + \omega^{2} } \), and \( \omega \gg n \), then ignoring n in exponential functions in comparison with the (\( \sqrt {n^{2} + \omega^{2} } \)), we get
If we denote \( \text{e}^{{\sqrt {n^{2} + \omega^{2} } T}} = \xi \), we obtain from (15) is a quadratic equation in the form
where \( a = \alpha_{1} A_{1} tg\alpha ,\quad b = \cos \alpha \cdot k_{0} - \alpha_{0} \cos \alpha \cdot C_{0} ,\quad c = - \beta_{1} A_{2} tg\alpha \).
Here \( A_{1} ,A_{2} \) and \( C_{0} \) given by (12):
Thus, the determined time separation of suspensions, taking into account the spatial movement of the solid particles of the suspension.
1. There should be considered a special case, which is more suitable for practical applications and determine the approximate time of separation.
Movements of suspensions of the particle in the direction of the axis Oy. Movement of particles of the suspension in the directions Ox and Oz disregarded. The angular speed of the rotor is large enough so that \( \alpha \to \frac{\pi }{2},\,\,\,{\Omega} \to 0 \). Then the differential equation of motion of a particle is given by
As In the general case \( \omega = \omega (t),\; \alpha = \alpha (t),\;{\Omega} = {\Omega} (t) \), Eq. (18) is a differential equation with variable coefficients and finding its exact solution is very difficult. Therefore, to find an approximate solution of Eq. (18) we consider the established mode of the system when \( \omega = const \) and \( \alpha = const \), \( {\Omega} = 0 \). Under these conditions, Eq. (18) takes the form
Linear non-homogeneous differential equation (19) has a solution
where \( C_{1} ,C_{2} \)—integration constants, which are determined from the initial conditions of the problem and will be equal to:
Then final expression the law of motion of the particle takes the form
From formula (22) define the precipitation suspension. Thus, from formula (22) we have
Given that the second term on the right-hand side of Eq. (23) by several orders of magnitude smaller than the first term (\( b_{1} > b_{0} ,\frac{1}{{\text{e}^{{b_{1} T}} }} \to 0 \) in \( \omega \to \infty \)), that taking into account this consideration, (23) we obtain an approximate value of deposition time of suspension:
Thus, the dependence of the angle of rotation of the cup on the angular speed of the rotor, defined law of motion a of the particle suspensions and the deposition of it on the bottom of the cup (while the rotor stops), i.e. the time of separation suspension.
More precise separation of suspensions time can be achieved if coefficients neglected compared with the expression \( \sqrt {\frac{{x^{2} }}{4} + \omega^{2} \sin^{2} \alpha } \). Then the coefficients \( b_{0} \) and \( b_{1} \) are equal to those \( b_{0} = b_{1} = \sqrt {\frac{{x^{2} }}{4} + \omega^{2} \sin^{2} \alpha } = b \). In this case, formula (23) takes the form \( \xi^{2} + p\xi + q = 0 \), where
Consider the case when the rotor shaft is adopted a rigid, but support—elastic, with a corresponding coefficient of elasticity.
Rotor vibrations occur due to an imbalance of suspended containers (cups, test tubes, etc.). While containers are positioned symmetrically with respect to each other, however, the mass of suspensions in them may be different. The number of particles in finely ground them can not be equal, and the time also differs particle precipitation, etc. All of these factors may be the cause of imbalance in the rotor system, which causes oscillation of the rotor.
Figure 3 shows the model is equivalent to the rotor system with containers, taking into account rainfall the particle suspension. The mass, which creates an imbalance denote \( m_{0} \), rotor mass in m. The position of the rotor center of gravity (the shaft) is determined relative to Oxy. It is assumed that the rotor makes a plane-parallel movement. The position of the shaft in the Oxy coordinate system defined by the x and y.

The equivalent model
Let us introduce the dissipative function in the form
Differential equations of motion systems are nonlinear, finding the exact solution that is very problematic.
In particular, the equations of motion are complicated when the rotation angle of the cup is a function of time \( \alpha = \alpha (t) \), as in the case of \( \alpha \) include trigonometric functions.
Consider the special case when the angle of rotation of the container fixed \( \alpha = const \).
(1) Case \( x = x(t),\,\,y = y(t),\,\,l = l(t),\,\,\alpha = const,\,\,{\Omega} = 0,\,\,\,0 < \alpha < \frac{\pi }{2} \). In this case, taking into account (25) we obtain the equations of motion of the system
The system (26) is the equation of motion of a system with periodically varying coefficients. When there is a periodically varying parameters growing vibrations of the system, i.e., A so-called parametric oscillation. Eccentricity in this case the system periodically varies, i.e. changing the force of inertia.
The system of Eq. (26) in the literature has been well studied, although the actual results were obtained only for some special cases. Of particular interest is the study of the conditions of stability of the system. For the equation with periodically varying coefficients of rigidity has a diagram Ainis-Strett, which can be found using the conditions of stability of the system.
You can lead one of the solution methods based on the method of complex amplitudes. The problem is solved in the complex plane, in this case, Eq. (26) will have the form:
From the system (27) excluding the \( ({\ddot l} - \omega^{2} l) \), obtain the
The vibrations of the rotor in the complex plane can be represented as
Substituting (30) into (29) we find
C—constant of integration.
Substituting (30) and (31) we obtain
Substituting (32), (33) and (34) into (30) and (31) we obtain the motion law of the rotor and the point M of mass т, which moves along the container axis.
The law of motion of the rotor in the direction of the axes Ox and Oy:
From (35) it is obvious that the rotor performs harmonic oscillations. The point M a mass \( m_{0} \) has a certain position in accordance with (37), that is this point is at a distance \( l = C \) axis of containers rotation.
3 Conclusions
The important results were obtained within the framework of this study. The problem in this formulation is solved analytically. The analytical dependence of the angular speed of the container, the angle of rotation as a whole. Certain laws of spatial motion of a particle suspension and the deposition of it on the bottom of the container (the stop of the rotor)—the time separation of the suspension. When account is taken of the rotor vibration at fixed angles of rotation of the container was conducted stability analysis method of complex amplitudes, which suggests a harmonic vibration of the rotor.
References
Лyкьянeнкo, B.M., Tapaнeц, A.B.: Пpoмышлeнныe цeнтpифyги, Mocквa: Xимия, 1974, 376 c
Greenspan, H.P.: The Theory of Rotating Fluids. Cambridge University Press, Cambridge (1968)
Coкoлoв, B.И.: Coвpeмeнныe пpoмышлeнныe цeнтpифyги. Mocквa: Maшинocтpoeниe, 1967, 524 c
Bullen, J., Bruijn, J.M.: Impact of the centrifugal speed of rotation on the quality of white sugar crystals. Zuckerindustrie 129, 738–741 (2004)
Jullienne, L.M.: Washing sugar in batch A-centrifugals, Proc. SASTA, pp. 42–43, 1983
Please, C.P., Fowkes, N.D., Mason, D.P., Khalique, C.M., Hutchinson, A., Rademeyer, M.C., Loubser R., Davis, S.: Extraction of molasses from sugar crystals in a centrifuge. Math. Modell. Anal. 19(3), 347–358 (2014)
Paтoбыльcкий, B.Ф., Кapaмзин, B.A. и дp.: O мaтeмaтичecкoм мoдeлиpoвaнии движeния жидкocтнoгo ceпapaтopa,Tpyды BHИЭКИПpoдмaш, Mocквa, 1983, № 59, c. 87–91
Epкoвa, Л.H., Cмиpнoв, H.И.: Cвoбoднoe ocaждeниe твёpдыx cфepичecкиx чacтиц в жидкoй cpeдe, Жypнaл пpиклaднoй xимии, т.24, вып.5, 1966, c. 733–738
Пoдoльcкий, B.Г., Эпштeйн, Л.Ю.: Oпpeдeлeниe динaмичecкиx нaгpyзoк, вoзникaющиx пpи paбoтe цeнтpифyг, Xимичecкoe и нeфтянoe мaшинocтpoeниe, 1965, №3
Ligier, K.: Methods of diagnosing an acww 1000 sugar centrifuge with the use of vibration processes. Techn. Sci. 11, 289–300 (2008)
Zachwieja, J., Ligier, K.: Numerical analysis of vertical rotor dynamics of ACWW 1000 centrifuge. J. Theor. Appl. Mech. 43(2), 257–275 (2005)
Nelson, H.D., McVaugh, J.M.: The dynamics rotor bearing systems using finite elements. J. Eng. Ind. 98, 593–599 (1976)
Trowbridge, M.E.: Centrifugal purification of oils for marine service. Trans. Inst. Mar. Eng. 75(1), 1–22 (1970)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Kydyrbekuly, A.B., Khajieva, L.A., Ybraev, G.E. (2017). Researching of the Method of Separation of Fine-Grain Particles by Centrifugation in a Liquid Medium. In: Beran, J., Bílek, M., Žabka, P. (eds) Advances in Mechanism Design II. Mechanisms and Machine Science, vol 44. Springer, Cham. https://doi.org/10.1007/978-3-319-44087-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-44087-3_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-44086-6
Online ISBN: 978-3-319-44087-3
eBook Packages: EngineeringEngineering (R0)