
Abstract
Electronics are rapidly becoming the major driver in new car developments. Since their humble beginnings as entertainment and comfort features for the car driver, they have gradually been used to optimize the car behavior and are now more and more taking over the operation of the human driver itself. This is a disruptive evolution since the fully autonomous car will ultimately function as a personal public transport with high comfort and flexibility. Many technical, safety and legal issues have to be solved but this evolution can also have a large impact on traffic and city organization. Due to the large impact of mobility on the human society, it is clear that the future automotive electronics in the autonomous car will have to be very predictable and accurate and must remain extremely reliable and safe under the harsh automotive environment conditions and disturbances.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Electronic Control Unit
- Advanced Driver Assistance System
- Human Driver
- Fault Tree Analysis
- Wiring Harness
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
After some difficult years, the market for light vehicles is predicted to grow steadily in the coming years by around 4 % per year to 110 m vehicles in 2020 [1]. The growth rate of electronics within the car is much higher and—despite the continuously decreasing cost of semiconductors—their share of the total car cost is predicted to reach 35 % in 2020 and 50 % in 2030 [2]. Where cars started as pure mechanical machines, fully controlled by the human driver, they are now complex electronic systems with optimized mechanical performances and increased comfort and safety for the driver. At this moment, the powertrain, chassis and body electronics are already well developed and new electronics developments are focusing more on safety, driver comfort and convenience and on advanced driver assistance systems (ADAS). The ultimate goal is the autonomous, driverless car, which is now advertised by different manufacturers and generates a lot of attention in the media. In the first paragraph the history and the future trends of automotive electronics and the disruptive nature of the driverless car will be discussed in more detail.
In parallel with this trend towards autonomous, driverless cars, a lot of effort in the automotive industry is also devoted to more energy efficient and cleaner vehicles e.g. mild and full hybrid vehicles, battery and fuel cell electric vehicles… Although this evolution requires a lot of electronics, it is mainly driven by the improvements of the energy sources, their energy content, weight and volume, lifetime, safety, refueling time and infrastructure… This trend is not driven by automotive electronics and is not further discussed here.
Semiconductors for automotive electronics are often perceived as not state-of-the-art and lagging mainstream chip design and technologies. This perception is now disappearing for the advanced micro control units (MCU), used in the advanced driver assistance systems [3], but remains for the large number of mixed signal ASICs used in the car. Indeed, many ASICs in the car use mature mainstream or special high voltage technologies with less advanced lithography and the signal processing specifications of the circuits are typically lower than for commercial systems. But, this is due to the very high reliability and safety requirements and to the “hostile” car environment in which these systems have to remain fully functional [4]. The high and spiky supply voltage, the extreme temperatures and the harsh interferences are very tough boundary conditions for automotive ASICs. Furthermore, low total system cost prohibits extensive environment shielding and protection of the circuits. These specific automotive characteristics and their effects on technology and circuit design are discussed in the second paragraph.
2 Trends in Automotive Electronics
The auto-mobile started as a pure mechanical system and remained a high performance mechanical system during more than half a century. Apart from the ignition system and the radio, introduced by the Galvin corporation in 1930 (Motorola) and by Ideal (Blaupunkt) shortly after, no electronics were used in the car. It was indeed difficult to compete with very cost efficient mechanical and hydraulic systems.
Electrical and electronic systems were introduced first as special and expensive features in high-end cars, mainly focusing on engine improvements, driver convenience and safety e.g. electronic injection, air-conditioning, airbags… While most of these applications were easily adopted by the driver community, some safety measures, with a direct impact on the driver and the passengers, raised controversy e.g. the still ongoing safety belt discussions. Airbags are another example of the human reluctance to trust new developments. Airbag patents for automotive use were already registered in 1951 in Germany and the US and were offered in the early 1970s as a high-end car feature [5]. Despite their proven safety improvement, the introduction failed commercially. They were reintroduced in the 1980s by Mercedes and deployed as standard equipment in addition to seatbelts in several high-end cars by the end of the decade.
Seatbelts were also introduced in the 1950s but were not generally installed in all cars, despite their high efficiency in saving thousands of deaths on the road. Laws had to be voted requiring fitting and wearing seatbelts in all cars, including mid-range and low-range cars. Legislation is indeed an important driver for electronics in the car by mandating better pollution, safety and traffic control systems in line with technological possibilities.
Car electronics are now also embraced by car manufacturers for their higher flexibility in manufacturing, easier model and upgrade differentiation and better servicing. Furthermore, new advanced features have become an important commercial differentiator between car manufacturers.
2.1 Automotive Electronics Evolution
The pioneering stage of horseless carriage ended around 1890 with the first regular series production of gasoline cars on a small scale in France. Soon other manufacturers in France and the U.S. followed with ever larger scale production facilities in moving assembly lines. These first cars were purely mechanical systems and required high technical skills to drive them and keep them going. Roads at that time were not adapted to car traffic but traffic was very low anyway.
After World War I, car prices had plummeted down and “Automobiling” was no longer a privilege for the rich but became accessible for everyday people. Traffic increased considerably and the number of motor-vehicle fatalities increased sharply. As a result, nation-wide traffic laws for cars were issued. Driver-licenses became mandatory and because the required technical skills to drive a car remained high, these licenses also included a technical exam. To cope with the increased traffic, roads were enlarged and the first highways were built in Germany in the 1930s. Cars were increasingly used for long trips and to make these journeys more comfortable, the first electrical appliances, head- and tail-lamps, radio, wiper/washers… were installed in the cars. These first electrical systems were only introduced in non-critical areas: driver comfort, information and entertainment. The low intelligence electrical systems had no impact on engine performance nor on driver or driver skills. They were typically pushbutton controlled on/off systems and were stand-alone systems, not requiring any communication to other electrical systems in the car (Fig. 7.1).

VW Beetle 1954, complete electrical schematic
After World War II, traffic became even more dense and the focus of driver-licenses shifted to driver skills and traffic rules. The technical exams disappeared since the cars became more reliable and easy to use. More highways were built in Europe and the U.S. and attracted even more traffic. More electronic systems entered the car for engine optimization (e.g. fuel injection), comfort and convenience (e.g. air-conditioning, cruise control), active and passive safety (e.g. airbags, ABS) and driver information and entertainment (e.g. GPS, service warnings). These increasingly complex and intelligent electronic systems optimized and controlled the engine performance and supported, but not controlled, the driver through reactive correction of driver errors (e.g. traction control, ESP, brake assist system). The advanced Electronic Control Units (ECU) require accurate sensors, powerful signal processing and communication with other ECUs in the car. Their communication and impact however remained within the car shell.
In the last 20 years, a third phase of automotive electronics has started. Electronic systems now gradually control more critical applications (e.g. adaptive cruise control, anti-collision radar, automatic car parking…) Since these intelligent systems can be authorized by the driver to take over full car control in well-defined situations and can also proactively prevent dangerous situations inside and around the car without driver control, they have to be very robust and safe. They are also increasingly complex. Nowadays, a typical car contains around 90 ECUs, 170 sensors, more than 15 million lines of code, and a few kilometer network with more than 1000 connection points [6].
2.2 Steps Towards Autonomous Driving
It is not realistic to rethink human mobility from scratch and devise a whole new traffic system for autonomous cars since this would require the replacement of all current cars and road infrastructure at once by a new system. In reality, autonomous cars and human driven cars will share the road for a long time. Hence, the electronic system that replaces the driver in an autonomous car must start from the human behavior of the driver [7]. Human senses, vision and hearing, can be replaced by sensors and communications. Human decision making however is much more difficult and requires huge amounts of software and continuous improvement by learning. The human decision making also depends on a large memory of human behavior, geographical situations and environment conditions (e.g. human body language, weather, road pavement…). Human behavior is also culture specific and not easy to reduce to an algorithm (e.g. a speed limit is interpreted differently by human drivers in different countries and an autonomous car which obeys every traffic law and speed limit will impede traffic flow and make other drivers nervous in many countries). Sensors, memory and software are key requirements to replace the human driver in the autonomous car.
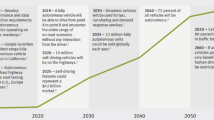
Ultimately, the human mobility system could then become a traffic network, which takes control of the macro movements (upper layers) of the autonomous cars. Each autonomous car executes full control of the car and the immediate surroundings and communicates with neighboring cars and with local traffic signs. The driver is now a passenger for the complete or at least most of the journey. In such system, the car functions as a personal public transport with the highest flexibility. This is a disruptive vision of future mobility and opens new perspectives for the society on top of the mobility aspects. Although this landmark may be reached technically within 10–15 years for high-end cars, the adoption by the society and the penetration in lower-class vehicles is expected to be much slower [8]. It will also be an evolutionary process in which three phases can be distinguished [9].
In a first phase, driving is partially automatic. In a number of well-defined, not complex driving situations, the human driver can hand over control to the autonomous driver but he must be prepared to retake control instantly if unforeseen conditions occur. In this phase, the full responsibility and liability remains with the human driver. Examples of such driving situations are cruising at high speed on a highway where no crossing traffic can occur or driving at low speed in a traffic jam where no fast movements from other drivers are expected. These situations are monotonous and boring for the driver and his concentration can easily fade away. This is dangerous since handover to a sleepy driver can take more than 18 seconds, while a vigilant driver can react within one second [10]. The car must either detect fatigue, drowsiness or distraction of the driver and keep him alert or the car must be already intelligent enough to drive itself into a safe condition.
The next phase is highly automated driving where the autonomous driver handles very complex driving situations and recognizes, well in time, unknown driving situations. The autonomous driver then alerts the human driver to take over control and turns to safe operation until the driver reacts. Car to car and traffic sign to car communications and a developing traffic network control on major roads will augment the performance. The autonomous driver will be able to handle all car to car interactions on highways, rural roads and city streets. Interactions between the car and pedestrians though will be much more unpredictable due to difficult interpretation of human reactions and body language. In this highly automated driving phase, the human driver cedes full control to the electronic system and this will inevitably lead to legal issues regarding responsibility and liability of the driver or the car/ADAS manufacturer in case of accidents. Confidentiality of the data exchanged with other cars, with the traffic network and with the car manufacturers is also an important legal issue.
As described above, the last phase is the fully autonomous car, which completely replaces the human driver. The car functions as a personal public transport with high comfort and flexibility and can also move without a human driver inside. This opens up new possibilities. If public transport becomes so comfortable and flexible, there will be less incentive to buy and own your personal car, which is sitting idle 90 % of the time. This is a trend, which is already seen with young adults in Europe, who live in a city and extensively use public transport, despite its current inflexibility and lack of comfort. It is tempting to imagine mobility-on-demand with a pool of cars, small, medium and large size for short, medium and long distances. Customers would call-up a small or medium car for shopping and work commuting and a long distance car for business trips and leisure. Because they can rapidly move without driver, these cars do not stay idle at the customer premises and they can be concentrated in a few parking buildings in the city or constantly drive around to lower pick-up time of customers. Such shared mobility system would drastically lower the total number of cars by lowering their idle time and reclaim living area in the cities by eliminating their parking spaces. A smart traffic network with smart cars will also smooth urban traffic but traffic congestion is not expected to decrease since travelling by car will become more convenient and more people, including people who are currently unable to drive, will drive longer distances. Such mobility-on-demand is however only a viable approach in cities and not in rural areas. Also the car is still very much an individual status symbol and many drivers enjoy driving, which is not expected to change rapidly.
It will be a formidable technical task to build the autonomous car, the car to car and traffic sign to car communication system and the traffic network control system. Safety, predictability and protection against malicious attacks are key issues in this development. The system will also coexist with non-autonomous cars, with pedestrians, with unpredictable kids, with animals, with unforeseen road obstacles… Pedestrians and human drivers are likely to exploit known weaknesses in the system to their advantage (e.g. not allowed street crossing or priority taking since the autonomous car will obey the law and yield anyway). Unless standardized, manufacturers of the ADAS systems are likely to compete on human behavior algorithms. This could give some car types an, considered unfair, advantage over other cars. Eventually the current ranking of high-end, mid-end and low-end cars would shift to a first-class, business-class and economy-class ADAS system ranking.
3 Characteristics of Automotive Electronics
The main differences between automotive and typical commercial electronic systems are due to the supply by the car battery, the distribution of the system ECU’s over the whole car-body and the stringent safety requirements for automotive applications.
Although the mainstream lead-acid battery is nominally 14 V, the supply voltage to the ECU’s shows a large variation: typically 5 to 40…60 V and it is polluted by various interfering signals. Due to new, high-power applications in the car and stringent emission requirements there is an evolution to implement a second 48 V Lithium battery for high-end and for mild-hybrid cars. This battery voltage is less polluted and the maximum ECU supply voltage is in both cases quite comparable. Internal in the ECU, standard low voltages are used for the high complexity signal processing MCU’s and memories but the ASICs at the borders of the ECU must cope with the high voltages and disturbances on their supply pins, communication pins, sensor inputs and actuator outputs.
The distribution of the ECU’s and the communication networks over the whole car-body make them vulnerable to EMC, ESD and transients. Shielding cannot be used for its extra cost and weight. As a consequence, EMC and ESD are very tough constraints in automotive design in contrast with most commercial electronic systems, which operate in much better shielded environments.
A major reason for the distribution of ECU’s over the car-body is to bring them closer to sensors and actuators. This improves speed and accuracy of the applications but exposes the ECU’s to the high temperatures in some car-locations. These high temperatures exceed the industrial and also the military (125 °C ambient) temperature range and there is a strong push for further increase. This puts chip design, chip reliability, package materials, PCB materials and manufacturing under pressure. In extreme temperature cases special technologies and packages have to be used.
Finally, since more and more critical car-functions are controlled by electronics, safety, reliability and predictable error behavior of the applications are vital and the communication between the ECU’s must remain reliable and dependable under all conditions.
In conclusion, automotive electronics must fulfil all classical design challenges: low cost, fast time-to-market, complete functionality, low power consumption, testability… On top of this they must also be designed according to the highest safety and reliability standards, cope with high voltages and large supply variations, function up to high temperatures, sustain large ESD pulses, not disturb neighboring applications and remain functional in the presence of large EMC and transient interferences.
3.1 Quality and Safety
The automotive industry has always been known for its very high reliability requirements. All classical reliability techniques are used in design and test: six sigma design, worst case and degradation simulation, high test coverage, IDDQ, Vstress and other advanced tests… On top of this other reliability engineering methods are used such as FMEA (Failure Mode and Effect Analysis) and FTA (Fault Tree Analysis). The former is a bottom-up, inductive evaluation of failure effects and becomes tedious for complex systems. The latter is a top-down, deductive chain-of-events tree model leading to the accident and assumes independence of failures, which is not always true.
Safety however is not the same as reliability [11, 12]. Where reliability focuses on component failures and their MTTF (Mean Time To Failure), safety of a complex system can be impacted even when no components fail their specification due to e.g. incomplete concepts and specifications or human or procedural interactions. The contrary can also occur. Therefore ISO 26262 [13] is now used to make safety part of all phases of the product lifecycle: management, concept, system, hardware, software, development, production, operation, service …
From the discussion above on autonomous driving, it is clear that the requirements for safety of the complete ADAS will not decrease but become more stringent in the future.
3.2 High-Voltage
The mainstream lead-acid battery is a fairly reliable and production proven supply but it shows large fluctuations. While the nominal voltage is 14 V, the minimum can drop to less than 7 V and the maximum can rise to more than 19 V when charged by the alternator. On top of this large tolerance, the distribution of the battery voltage over the car-body adds another spread and makes it vulnerable to interferences from high-power actuators and EMC. These interferences create all sorts of spikes on the supply voltage but do not drastically change the DC value of the battery. A special case occurs when the battery is disconnected or defective and the alternator charges the electronic system of the car without the stabilizing effect of the battery. This is the load-dump condition. Since the low voltage alternator is very inefficient, it will react slowly on the generated overvoltage and, if not clamped, the voltage will rise to more than 100 V peak during half a second. A clamped load-dump limits this rise below 40–60 V. Finally, the battery connections can be reversed and a series diode is used to prevent this. This results in a battery voltage between 5 V and 40 … 60 V with high voltage (150 … 200 V) short impulses (ISO 7637 [14, 15]) and EMC interferences.
Due to the ever increasing peak power demand in high-end cars, new electronic applications which are difficult and inefficient to build on a 14 V supply and the low efficiency of the 14 V alternator, a study to define a future automotive electrical system was conducted in MIT [16]. This resulted in the “42 Volt Powernet” draft specification in 1997, based on a 42 V lead-acid secondary battery (three times the 14 V battery). For different technical and commercial reasons, this was never implemented in large series production cars. But the underlying necessity for a higher power battery and alternator remained. With an extra push from the lower emission requirements for 2020, work on a high voltage battery has resumed and a new 48 V standard has been proposed in 2011 by five German carmakers. This battery is based on state-of-the-art battery technology (lithium nickel manganese cobalt oxide: NMC). Luxury and mild-hybrid cars are the first ones to use this new secondary battery. This battery voltage is less polluted by the load-dump than the 14 V battery and the maximum ECU supply voltage is in both cases quite comparable and remains below the shock hazard protection limit for DC voltages: 60 V (Fig. 7.2).

Voltage ranges for the 14 V lead-acid and the 48 V NMC car-batteries
Various technology families with many different types of DMOS transistors have been developed for these high voltage applications. These technology families follow their own roadmap but they lag the mainstream CMOS roadmap by roughly three generations. As a result, the high voltage chips have a limited digital content and are usually at the border of the ECU, interfacing with the supply, the sensors, the actuators and the communication channels. The complex signal processing in MCU’s and DSP’s remains within the ECU and uses low voltage state-of-the-art technologies. The high voltage DMOS transistors have a quite complicated Safe Operating Area (SOA). The SOA is confined by instant overvoltage and overcurrent failures, by rapid heating degradation and by various field-related degradation mechanisms. The high voltage design requires different layout and circuit techniques while the high power induces self-heating and large temperature gradients on the chip [17].
With the advent of the new 48 V Powernet secondary supply and a 48 V alternator with much higher efficiency than the 14 V alternator, the power bottleneck for high-end cars and for power-hungry applications is relieved. There will be no push for higher voltages in the near future especially since this would exceed the 60 V shock hazard protection limit for DC voltages and would require costly and heavy protections and shieldings throughout the car.
3.3 High Temperature
High temperatures in the car typically rise to 150 … 170 °C ambient in the engine compartment or in the chassis near the breaks. Close to the exhaust the maximum temperature can even exceed 200 °C ambient [18]. Junction temperatures are typically 20–50 °C higher than the ambient and can rise to a maximum value of 170…200…250 °C, far beyond even military specifications. Shielding the electronics from the high temperature is expensive and there is a strong demand for higher temperature electronics in the car.
With appropriate components and design techniques, bulk silicon can handle temperatures up to 200…300 °C. SOI technologies are even better and go up to 250… >300 °C. If higher temperatures are needed, GaAs, GaN and SiC technologies have to be used. The main circuit design issue is the exponential increase of junction leakage with temperature up to the point that the material becomes intrinsic and the junction becomes a short-circuit. This intrinsic temperature limit drops with lower majority concentrations in the junction. Hence high-voltage junctions cannot go as high in temperature as low voltage junctions. Here again, SOI has a large advantage over bulk silicon [19] (Fig. 7.3).

Freeze-out and intrinsic temperatures for high-voltage (lowly doped) and low-voltage (highly doped) semiconductor junctions
Silicon, bulk or SOI, can handle the required high temperatures up to e.g. 200 °C or even higher but the packaging is now the limiting factor [20]. Especially wire bonding degradation and depolymerization of classic plastic packages limit the maximum temperatures to much lower values. More expensive or newer plastic packages and chip connection techniques can be used to extend this limit.
The demand for higher ambient temperature electronics in automotive will continue. The chips also contain increasingly more high power devices and complex signal processing blocks. Both give rise to an increase of the maximum junction temperature, the former directly, the latter tempered by technology improvements. High temperature capability will continue to be an asset for silicon manufacturers. An increase of the maximum temperature requires advancements on all levels: technology, characterization, chip layout and design, package materials and package to chip connections, PCB and ECU materials and connections…
3.4 EMC Interferences
The U.K. Defense Standard 59-41 describes EMC as: “Electro Magnetic Compatibility is the ability of electrical and electronic equipments, subsystems and systems to share the electromagnetic spectrum and perform their desired functions without unacceptable degradation from or to the specified electromagnetic environment”.
EMC deals with electromagnetic fields, which are completely described by Maxwell’s laws at the device and vehicle scale. These laws describe the fields in time and three-dimensional space for all signals, linear and non-linear, in all materials, homogeneous or not. They are virtually impossible to solve analytically except for very simplified structures but they can be solved by various EM simulation techniques for low complexity two and three-dimensional structures[21].
Small dipole and loop antennas with dimensions much smaller than the wavelength of the EM-field can be solved analytically. They radiate very low energy into the far field and most of their energy is kept in the near field, where it behaves as capacitive, respectively inductive coupling. The field behavior of these antennas can then be neglected and only the coupling behavior has to be taken into account. This can be modeled with classic capacitors and inductors in SPICE-based simulators.
Dimensions up to 2–3 mm can be treated as small antennas for frequencies below 3 GHz and slopes slower than 100 psec, Chip circuits, blocks and subsystems fall in this category and only for large chips and packages some on-chip antennas can start to radiate at the highest frequencies and fastest slopes. PCB’s, ECU’s and the wiring harness of the vehicle are much larger and must be treated as radiating antennas. Radiated emission and immunity is hence a major problem for ECU’s and the wiring harness but not for the chip (Fig. 7.4).

EMC can be modeled by coupling at chip level. EMC has to be treated as a radiating field at ECU and vehicle level
The chip however generates fast and large differential and common-mode current and voltage changes at its outputs and power pins, which are transformed into a radiating field by the efficient antennas in the ECU and the wiring harness. Conversely, the efficient ECU and wiring harness antennas transform an incident EMC radiation field into conducted interference signals to the chip.
In short, EMC is treated at chip level as a non-radiating, conductive coupling while it is treated at ECU and vehicle level as a radiation. The translation between the EM radiating field and the conducted currents and voltages at the chip boundaries is very complex since it is dependent on the three dimensional structure of the ECU and on the complex impedances at the chip boundary. This results in a difficult situation where the car manufacturer and the Tier one suppliers think in EM-fields and are very uncertain (and conservative) in translating this into conductive specifications for the chip manufacturer. Only with a lot of experience and a close cooperation between the chip and module manufacturers this division can be bridged and adequate conduction limits for the chip designers can be set.
This is also reflected in the component radiation standards IEC 61967 and IEC 62132, which contain different measurement methods for radiated and for conducted emission and immunity measurements [22, 23].
Even with good conductive specifications, the simulation of EMC at chip level remains a very difficult task. With EMC frequencies into the GHz range, very small parasitic components and couplings on the chip and in the package have to be included in the simulation deck. Large EMC interferences can cause non-linearities, breakdown and substrate currents. Resonances between parasitics and components are difficult to detect in simulation. Charge pumping due to large signal distortion and charge accumulation requires large signal transient simulations with many parasitics and couplings over a long simulation period.
EMC interferences will further increase in the future, mainly in frequency and to a lesser extent in power. There is however also an ongoing push to limit the discrete protection devices in the ECU’s. This increases the EMC power requirements with respect to immunity and requires higher accuracy power and communication drivers for emission control.
4 Conclusions
Electronics are a major driver in the evolution of the car and the human mobility. Due to the relentless advancements of sensors and software, the electronic system in a car is more and more taking over the operation of the human driver itself. This is a disruptive evolution which ultimately can transform the car in a personal public transport with high comfort and flexibility. This will not only transform traffic and human mobility but can also have a large impact on life organization and city urbanization. This will however not happen overnight due to the human reluctance to accept and adopt these new possibilities.
The evolution of automotive electronics towards autonomous cars requires very high levels of safety. The increasing power demand for advanced driver assistance systems can only be satisfied by high voltage supplies. It is also not expected that high temperature spots in the car will disappear and the interferences from EMC radiations will increase in power and extend into higher frequencies. The specific automotive characteristics of automotive electronics will hence remain important design and technology challenges in the future.
References
KPMG’s Global Automotive Executive Survey 2015
PwC Semiconductor Report, Spotlight on Automotive. September 26, 2013
C. Takahashi, S. Shibahara, K. Fukuoka, J. Matsushima, Y. Kitaji, Y. Shimazaki, H. Hara, T.Irita, A 16 nm FinFET Heterogeneous Nona-Core SoC Complying with ISO26262 ASIL-B: Achieving Random Hardware Failures per Hour Reliability. Paper 4.5, ISSCC 2016, San Francisco, Februari 1, 2016
H. Casier, Electronic circuits in an automotive environment. Tutorial Session “Circuit Design for Automotive”, ESSCIRC 2013, Bucharest, 16 Sep 2013
“Airbag” from Wikipedia, retrieved January 2016
K. Paesler, M. Saemann, Continental, growth opportunities in the automotive group. in Kepler Cheuvreux One Stop Shop Conference, Milan, 29 June 2015
Think Act, Autonomous Driving, Roland Berger Strategy Consultants GMBH, November 2014
McKinsey & Company, Automotive Revolution—Perspective towards 2030. Advanced Industries, January 2016
NHTSA, Preliminary Statement on Policy Concerning Automated Vehicles. May 2013
ITS World Congress 2015, Connected and Automated Driving, Panel discussion at ITS World Congress 2015, Bordeaux, France, 6 Oct. 2015
N.G. Leveson, Engineering a Safer World. (MIT Press, 2011), ISBN 978-0-262-29911-4 (ebook)
Q. Van Eikema Hommes, Assessment of the ISO 26262 standard, road vehicles—functional safety. in SAE 2012 Government/Industry Meeting, 25 Jan 2012
ISO 26262, Road Vehicles—Functional Safety, Parts 1–10 version 1 released in 2011. Version 2 in preparation (with two extra parts)
ISO 7637-2:2011, Road vehicles—Electrical disturbances from conduction and coupling, Part 2: Electrical transient conduction along supply lines only
ISO 7637-3:2007, Road vehicles—Electrical disturbances from conduction and coupling, Part 3: Electrical transient transmission by capacitive and inductive coupling via lines other than supply lines. New Publication, March 2016
J. Kassakian, Challenges of the new 42 volt architecture and progress on its International acceptance. VDI Berichte Nr. 1415, 21–35 (October 1998)
H. Casier, “High-Voltage/High-Temperature Challenges and Limitations”, Mead Education, Advanced Engineering Course on “High-Voltage and Automotive IC Design”, Lausanne, 25 Aug 2015
W. Wondrak, A. Debhi, G. Umbach, A. Blessing, R. Getto, F.P. Pesi, W. Unger, Passive components for high temperatures: application potential and technological challenges. in AEC Annual Reliability Workshop, Nashville, 20 April 2004
F. Patrick McCluskey, R. Grzybowski, T. Podlesak (ed.), High Temperature Electronics, (CRC Press, Boca Raton, 1997), ISBN 0-8493-9623-9
P.C. De Jong, Smart sensor systems for high-temperature applications, PhD Dissertation, T.U. Delft, The Netherlands (1998)
H. Casier, Automotive Interferences: EMC and Transients. IDESA Course funded by the EC 7th Framework Program, 19 June 2008
IEC 61967, Integrated Circuits—Measurement of electromagnetic emissions, 150 kHz to 1 GHz
IEC 62132, Integrated Circuits—Measurement of electromagnetic immunity, 150 kHz to 1 GHz
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Casier, H. (2017). Trends and Characteristics of Automotive Electronics. In: Baschirotto, A., Harpe, P., Makinwa, K. (eds) Wideband Continuous-time ΣΔ ADCs, Automotive Electronics, and Power Management. Springer, Cham. https://doi.org/10.1007/978-3-319-41670-0_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-41670-0_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-41669-4
Online ISBN: 978-3-319-41670-0
eBook Packages: EngineeringEngineering (R0)