
Abstract
We propose a modified local discontinuous Galerkin (LDG) method for second–order elliptic problems that does not require extrinsic penalization to ensure stability. Stability is instead achieved by showing a discrete Poincaré–Friedrichs inequality for the discrete gradient that employs a lifting of the jumps with one polynomial degree higher than the scalar approximation space. Our analysis covers rather general simplicial meshes with the possibility of hanging nodes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
It is well–known that the local discontinuous Galerkin (LDG) method for second–order elliptic problems can be formulated, in part, by replacing the differential operators in the variational formulation by their discrete counterparts [3–5]. For example, on the space of discontinuous piecewise polynomials of degree at most k, the discrete gradient operator is composed of the element-wise gradient corrected by a lifting of the jumps into the space of piecewise polynomial vector fields. The original formulation of the LDG method [3] employs liftings of same polynomial degree k as the scalar finite element space, while liftings of order k − 1 have also been considered, see the textbook [5] and the references therein. Part of the motivation for these choices of the order of the lifting is the correspondence to the order of the element-wise gradient and reasons of ease of implementation. However, unlike the continuous gradient acting on the space H 0 1, the discrete gradient operators with liftings of order k − 1 or k fail to satisfy a discrete Poincaré–Friedrichs inequality. Therefore, the LDG method requires additional penalization with user–defined penalty parameters to ensure stability.
In this note, we construct a modified LDG method with guaranteed stability without the need for extrinsic penalization. This result is obtained by simply increasing the polynomial degree of the lifting operator to order k + 1 and exploiting properties of the piecewise Raviart–Thomas–Nédélec finite element space. Our analysis covers the case of meshes with hanging nodes under a mild condition of face regularity which we introduce in this work. We recall that the order of the lifting in the LDG method does not alter the dimension or stencil of the resulting stiffness matrix. As a result, the proposed method has a negligible increase of computational cost and inherits the advantages of the standard LDG method in terms of locality and conservativity.
The rest of the paper is organized as follows. In Sect. 2 we give the notation used throughout the manuscript and state some preliminary results. We define the lifted gradient operator with increased polynomial degree in Sect. 3 and show that the L 2 norm of this operator is equivalent to a discrete H 1 norm on piecewise polynomial spaces. We establish by means of a counterexample that the increased polynomial degree is necessary to obtain this stability estimate in Sect. 4. In Sect. 5 we propose and study the modified LDG method in the context of the Poisson equation.
2 Notation
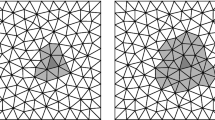
Let \(\varOmega \subset \mathbb{R}^{d}\), d ∈ { 2, 3}, be a bounded polytopal domain with Lipschitz boundary ∂ Ω. Let \(\{\mathcal{T}_{h}\}_{h>0}\) be a shape- and contact–regular sequence of simplicial meshes on Ω, as defined in [5, Definition 1.38]. For each element \(K \in \mathcal{T}_{h}\), let \(h_{K}\,:=\,\mathop{\mathrm{diam}}\nolimits K\), with \(h =\max _{K\in \mathcal{T}_{h}}h_{K}\) for each mesh \(\mathcal{T}_{h}\). We define the faces of the mesh as in [5, Definition 1.16], and we collect all interior and boundary faces in the sets \(\mathcal{F}_{h}^{i}\) and \(\mathcal{F}_{h}^{b}\), respectively, and let \(\mathcal{F}_{h}\,:=\,\mathcal{F}_{h}^{i} \cup \mathcal{F}_{h}^{b}\) denote the skeleton of \(\mathcal{T}_{h}\). In particular, \(F \in \mathcal{F}_{h}^{i}\) if F has positive (d − 1)-dimensional Hausdorff measure and if F = ∂ K 1 ∩ ∂ K 2 for two distinct mesh elements K 1 and K 2. For an element \(K \in \mathcal{T}_{h}\), we denote \(\mathcal{F}(K)\) the set of faces of K, i.e. \(E \in \mathcal{F}(K)\) if E is the closed convex hull of d vertices of the simplex K. Note that on a mesh with hanging nodes, a mesh face may be a proper subset of an element face, see Fig. 1, hence the notions of mesh faces and element faces do not need to coincide. In this work, the meshes are allowed to have hanging nodes, provided that they satisfy the following notion of face regularity.
Definition 1
A face \(F \in \mathcal{F}_{h}\) is called regular with respect to the element K if \(F \in \mathcal{F}(K)\). We say that the mesh \(\mathcal{T}_{h}\) is face regular if every face of \(\mathcal{F}_{h}\) is a regular face with respect to at least one element of \(\mathcal{T}_{h}\).
Figure 1 illustrates the notion of face regularity with two examples. We remark that any matching mesh is face regular. On a face regular mesh, any boundary face is necessarily regular with respect to the element to which it belongs. It appears that meshes of practical interest are most likely to be face regular, so this restriction is rather mild in practice.

Face regularity of meshes: the mesh on the left has interior faces \(\mathcal{F}_{h}^{i} = \left \{F_{i}\right \}_{i=1}^{3}\), each of which is regular to at least one element in the sense of Definition 1, even though F 2 and F 3 fail to be regular with respect to the element K, since F 2 and F 3 are only proper subsets of the elemental face F 2 ∪ F 3. Since all boundary faces are also regular, the mesh on the left is face regular in the sense of Definition 1, whereas the mesh on the right is not: the mesh face \(\bar{F}_{3}\) fails to be regular with respect to any element of the mesh
For integrable functions ϕ defined piecewise on either \(\mathcal{T}_{h}\) or \(\mathcal{F}_{h}\), we use the convention
For the integer k ≥ 1, we define the discontinuous finite element spaces V h, k as the space of real-valued piecewise-polynomials of degree at most k on \(\mathcal{T}_{h}\), and \(\boldsymbol{\varSigma }_{h,k+1}\) the space of vector-valued piecewise-polynomials of degree at most k + 1 on \(\mathcal{T}_{h}\). We define the mesh-dependent norm \(\Vert \cdot \Vert _{1,h}\) on V h, k by
where \(h_{F}\,:=\,\mathop{\mathrm{diam}}\nolimits F\) for each face \(F \in \mathcal{F}_{h}\).
We shall also make use of the (local) Raviart–Thomas–Nédélec space [7] defined by
where \(\mathcal{P}_{k}(K)\) is the space of vector-valued polynomials of degree at most k on K, and \(\tilde{\mathcal{P}}_{k}(K)\) is the space of real-valued homogeneous polynomials of degree k on K. We recall that \(\boldsymbol{\tau }_{h} \in \boldsymbol{ RTN}_{k+1}(K)\) is uniquely determined by the moments \(\int _{K}\boldsymbol{\tau }_{h} \cdot \boldsymbol{\mu }_{h}\,\mathrm{d}x\) and \(\int _{E}(\boldsymbol{\tau }_{h} \cdot \boldsymbol{ n}_{E})\,v_{h}\,\mathrm{d}s\) for all \(\boldsymbol{\mu }_{h} \in \boldsymbol{\mathcal{P}}_{k-1}(K)\) and \(v_{h} \in \mathcal{P}_{k}(E)\) for each \(E \in \mathcal{F}(K)\), where \(\boldsymbol{n}_{E}\) denotes a unit normal vector of E. We also recall that if all facial moments of \(\boldsymbol{\tau }_{h}\) vanish on an elemental face E, then \(\boldsymbol{\tau }_{h} \cdot \boldsymbol{ n}_{E}\) vanishes identically on E.
For a face \(F \in \mathcal{F}_{h}\) belonging to an element K ext, we define the jump and average operators by
where w is a sufficiently regular scalar or vector-valued function, and in the case where \(F \in \mathcal{F}_{h}^{i}\), K int is such that F = ∂ K ext ∩ ∂ K int. Here, the labelling is chosen so that \(\boldsymbol{n}_{F}\) is outward pointing with respect to K ext and inward pointing with respect to K int. Let \(\phi \in L^{2}(\mathcal{F}_{h})\), then the lifting operators \(\boldsymbol{r}_{h}: L^{2}(\mathcal{F}_{h}) \rightarrow \boldsymbol{\varSigma }_{h,k+1}\) and \(r_{h}: L^{2}(\mathcal{F}_{h}) \rightarrow V _{h,k}\) are defined by
For quantities a and b, we write \(a\lesssim b\) if and only if there is a positive constant C such that a ≤ Cb, where C is independent of the quantities of interest, such as the element sizes, but possibly dependent on the shape-regularity parameters and polynomial degrees.
3 Stability of Lifted Gradients
We define the lifted gradient \(G_{h}: V _{h,k} \rightarrow \boldsymbol{\varSigma }_{h,k+1}\) by
where ∇ h denotes the element-wise gradient operator. We note that G h is usually defined with a lifting using polynomial degrees k or k − 1, see for instance [5]. However, as we shall see, by increasing the polynomial degree of the lifting to k + 1, we obtain the following key stability result.
Theorem 2
Let \(\{\mathcal{T}_{h}\}_{h>0}\) denote a shape regular, contact regular and face regular sequence of simplicial meshes on Ω. Let the norm \(\Vert \cdot \Vert _{1,h}\) be defined by (1) and let the lifted gradient operator G h be defined by (3). Then, we have
Proof
The upper bound \(\Vert G_{h}(u_{h})\Vert _{L^{2}(\varOmega )}\lesssim \Vert u_{h}\Vert _{1,h}\) is standard and we refer the reader to [5, Sec. 4.3] for a proof. To show the lower bound, consider an arbitrary u h ∈ V h, k . Since \(G_{h}(u_{h}) \in \boldsymbol{\varSigma }_{h,k+1}\), we have
with the supremum being achieved by the choice \(\boldsymbol{\tau }_{h} = G_{h}(u_{h})\). Therefore, to show (4), it is sufficient to construct a \(\boldsymbol{\tau }_{h} \in \boldsymbol{\varSigma }_{h,k+1}\) such that
Let \(\boldsymbol{\tau }_{K} \in \boldsymbol{ RTN}_{k+1}(K)\) be defined by
where (7b) holds for all \(v_{h} \in \mathcal{P}_{k}(E)\), for each element face \(E \in \mathcal{F}(K)\). In particular, if the element face \(E \in \mathcal{F}_{h}\), i.e. E is also a mesh face, then we require that \(\boldsymbol{n}_{E}\) agrees with the choice of unit normal used to define the jump and average operators. If \(E\notin \mathcal{F}_{h}\), then \(\boldsymbol{\tau }_{K} \cdot \boldsymbol{ n}_{E}\) vanishes identically on E, and the orientation of \(\boldsymbol{n}_{E}\) on the left-hand side of (7b) does not matter. The global vector field \(\boldsymbol{\tau }_{h} \in \boldsymbol{\varSigma }_{h,k+1}\) is defined element-wise by \(\boldsymbol{\tau }_{h}\vert _{K} =\boldsymbol{\tau } _{K}\).
Since the mesh \(\mathcal{T}_{h}\) is assumed to be face regular, for every \(F \in \mathcal{F}_{h}\) there exists an element \(K \in \mathcal{T}_{h}\) and an elemental face \(E \in \mathcal{F}(K)\) such that E = F; then E satisfies the first condition in (7b). Therefore, the facts that \(\left \{\boldsymbol{\tau }_{h} \cdot \boldsymbol{ n}_{F}\right \}\vert _{F}\) and \([\![u_{h}]\!]\vert _{F}\) both belong to \(\mathcal{P}_{k}(F)\) together with (7b) imply that for each \(F \in \mathcal{F}_{h}\), one of only three situations may arise:
-
1.
F is a boundary face and hence \(F \in \mathcal{F}(K)\). In this case, we have \(\left \{\boldsymbol{\tau }_{h} \cdot \boldsymbol{ n}_{F}\right \}\vert _{F} = -h_{F}^{-1}[\![u_{h}]\!]\vert _{F}\).
-
2.
F is an interior face which is regular with respect to both elements to which it belongs. In this case, we have \(\left \{\boldsymbol{\tau }_{h} \cdot \boldsymbol{ n}_{F}\right \}\vert _{F} = -h_{F}^{-1}[\![u_{h}]\!]\vert _{F}\).
-
3.
F is an interior face which is regular with respect to only one of the elements to which it belongs. In this case, we have \(\left \{\boldsymbol{\tau }_{h} \cdot \boldsymbol{n}_{F}\right \}\vert _{F} = -\frac{1} {2}h_{F}^{-1}[\![u_{ h}]\!]\vert _{F}\), since \(\left.\boldsymbol{\tau }_{h}\right \vert _{K^{{\prime}}}\cdot \boldsymbol{n}_{F} \equiv 0\) for the element K ′ with respect to which F is not regular.
Therefore, since \(\boldsymbol{\tau }_{h} \in \boldsymbol{\varSigma }_{h,k+1}\), the definition of the lifting operator in (2a) implies that
where the second line follows from (7) and from the fact that \(\left.\nabla u_{h}\right \vert _{K} \in \mathcal{P}_{k-1}(K)\) for each \(K \in \mathcal{T}_{h}\). Hence (5) is satisfied, and we now verify (6). A classical scaling argument using the Piola transformation [2, p. 59] yields
Therefore, it follows from (7) that, for each \(K \in \mathcal{T}_{h}\),
4 Counterexample to Stability for Equal-Order Liftings
Theorem 2 shows the stability of the lifted gradient operator G h provided that the lifting operator \(\boldsymbol{r}_{h}\) has polynomial degree k + 1. In this section, we verify by means of a counterexample that the stability estimate does not generally hold for lower-order liftings, including in particular the case of equal-order liftings, which are commonly used in practice; our example simplifies a similar counterexample in [1].

Counterexample of Sect. 4: the domain Ω = (−1, 1)2 and the criss-cross mesh \(\mathcal{T}_{h}\) considered in the example
Example
Let Ω = (−1, 1)2, and consider the finite element space V h, k defined on a criss-cross mesh with four triangles, as depicted in Fig. 2, using piecewise linear polynomials, i.e. k = 1. Let u h ∈ V h, 1 be the piecewise linear function defined by
Direct calculations show that {u h } | F ≡ 0 on all interior faces \(F \in \mathcal{F}_{h}^{i}\), and that ∫ K u h dx = 0 for all elements \(K \in \mathcal{T}_{h}\). Consequently, if the lifting operator \(\boldsymbol{\tilde{r}}_{h}\) is defined in (2a) with the polynomial degree k + 1 replaced by k, and if \(\tilde{G}_{h}(u_{h})\,:=\,\nabla _{h}u_{h} -\boldsymbol{\tilde{ r}}_{h}([\![u_{h}]\!])\) denotes the equal-order lifted gradient, then we have for all \(\boldsymbol{\tau }_{h} \in \boldsymbol{\varSigma }_{h,1}\),
Since \(\tilde{G}_{h}(u_{h}) \in \boldsymbol{\varSigma }_{h,1}\), we deduce that \(\tilde{G}_{h}(u_{h}) = 0\), and thus it is found that no bound of the form \(\Vert u_{h}\Vert _{1,h}\lesssim \Vert \tilde{G}_{h}(u_{h})\Vert _{L^{2}(\varOmega )}\) is possible. □
5 A Modified LDG Method Without Penalty Parameters
As an application of Theorem 2, consider the discretization of the homogeneous Dirichlet boundary-value problem of the Poisson equation by a modified LDG method [3, 4] as follows. For f ∈ L 2(Ω), let u ∈ H 0 1(Ω) be the unique solution of
Let the bilinear form \(a_{h}: V _{h,k} \times V _{h,k} \rightarrow \mathbb{R}\) be defined by
where the lifted gradient operator G h was defined in (3). The bilinear form a h (⋅ , ⋅ ) defines a modified LDG method for (9): find u h ∈ V h, k such that
It follows from Theorem 2 that a h (⋅ , ⋅ ) is uniformly stable with respect to the norm \(\Vert \cdot \Vert _{1,h}\), and thus (11) is well-posed for each h. Moreover, the discrete Poincaré inequality [5] implies that \(\Vert u_{h}\Vert _{1,h}\lesssim \Vert \,f\Vert _{L^{2}(\varOmega )}\) for all h, so that the numerical solutions u h are uniformly bounded with respect to the mesh-dependent norms \(\Vert \cdot \Vert _{1,h}\). The a priori error analysis for the numerical method defined by (11) may be developed following the frameworks of [3, 5, 6], although for reasons of space we do not present the arguments here.
An interesting feature of the modified LDG method (11) is that it does not require any additional stabilization, such as added penalty terms of the form \(\int _{\mathcal{F}_{h}} \tfrac{\sigma _{F}} {h_{F}}[\![u_{h}]\!][\![v_{h}]\!]\,\mathrm{d}s\) for some user-defined parameter σ F . The absence of such penalty terms enables us to show the following discrete conservation property. We define the lifted divergence \(D_{h}: \boldsymbol{\varSigma }_{h,k+1} \rightarrow V _{h,k}\) by
where \(\mathop{\mathrm{div}}\nolimits _{h}\) denotes the element-wise divergence operator, and where r h is the scalar lifting operator defined in (2b). We note that we have the integration-by-parts identity
which should be compared with the analogous continuous identity between the spaces H 0 1(Ω) and \(H(\mathop{\mathrm{div}}\nolimits,\varOmega )\). Therefore, the numerical scheme (11) can be equivalently expressed in the strong form
which implies that the numerical solution u h ∈ V h, k solves
in the pointwise sense on each element K, where Π h k f denotes the element-wise L 2-projection of f into V h, k . Although we have shown here how the lifted gradient operator G h of degree k + 1 may be used to achieve a stable discretization of the Poisson equation, it is by no means restricted to this model problem, as the lifted gradients may be used to discretize the second-order terms of more general differential operators.
6 Conclusions
In this article, we studied an intrinsically stable modified LDG method without additional parameter dependent penalization. For this, we showed that increasing the degree of the lifting operator by one order leads to stability of the discrete gradient operator on face regular meshes with hanging nodes.
References
F. Brezzi, M. Manzini, D. Marini, P. Pietra, A. Russo, Discontinuous Finite Elements for Diffusion Problems. Atti del Convegno in Memoria di F. Brioschi (Istiuto Lombardo di Scienze e Lettere, Milano, 1997)
D. Boffi, F. Brezzi, M. Fortin, Mixed Finite Element Methods and Applications. Springer Series in Computational Mathematics, vol. 44 (Springer, Berlin/New York, 2013)
P. Castillo, B. Cockburn, I. Perugia, D. Schötzau, An a priori error analysis of the local discontinuous Galerkin method for elliptic problems. SIAM J. Numer. Anal. 38 (5), 1676–1706 (2000) (electronic)
B. Cockburn, C.-W. Shu, The local discontinuous Galerkin method for time-dependent convection-diffusion systems. SIAM J. Numer. Anal. 35 (6), 2440–2463 (1998) (electronic)
D.A. Di Pietro, A. Ern, Mathematical Aspects of Discontinuous Galerkin Methods. Mathématiques & Applications, vol. 69 (Springer, Berlin/New York, 2012)
T. Gudi, A new error analysis for discontinuous finite element methods for linear elliptic problems. Math. Comput. 79 (272), 2169–2189 (2010)
J.-C. Nédélec, Mixed finite elements in R 3. Numer. Math. 35 (3), 315–341 (1980)
Acknowledgements
The work of the third author was partially supported by the NSF grant DMS–1417980 and the Alfred Sloan Foundation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
John, L., Neilan, M., Smears, I. (2016). Stable Discontinuous Galerkin FEM Without Penalty Parameters. In: Karasözen, B., Manguoğlu, M., Tezer-Sezgin, M., Göktepe, S., Uğur, Ö. (eds) Numerical Mathematics and Advanced Applications ENUMATH 2015. Lecture Notes in Computational Science and Engineering, vol 112. Springer, Cham. https://doi.org/10.1007/978-3-319-39929-4_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-39929-4_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39927-0
Online ISBN: 978-3-319-39929-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)