
Abstract
The main objectives of paper is understanding the traffic theory, discussed the extended optimal velocity models proposed in many research and we proposed to modify VSDM model by incorporating between simple optimal velocity function and inverse of time to collision which its used as a safely indicator in braking state. The simulation results shows that MVSDM react better than VSDM in order to brake in a short time with a safely distance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Velocity-separation difference model
- Traffic flow
- Microscopic simulation
- Car following model
- Optimal velocity function
1 Introduction
Traffic flow problem started some 40 years ago, when Lighthill and Whitham [1] presented a model based on the analogy of vehicles in traffic flow. Then, mathematical description of traffic flow has been an interest subject of research and debate for traffic engineers. This has resulted in a broad scope of models describing different aspects of traffic flow operations, either by considering the time-space behavior of individual drivers under the influence of vehicles in their proximity [2]. For modeling traffic flow problem, there are two classes of models: Macroscopic, which is concerned with average behavior, such as traffic density, average speed and module area [3]. Microscopic models attempt to model the motion of individual vehicles within a system. They are typically functions of position, velocity, and acceleration. This type of models is created using ordinary differential equations, with each vehicle having its own equation. Because the behavior of these models is usually dictated by a lead vehicle, they are termed “car-following” models. Car-following models, which describe the processes by which drivers follow each other in the traffic stream [4]. Car-following itself forms one of the main processes in all microscopic simulation models as well as in modern traffic flow theory, which attempts to understand the interplay between phenomena at the individual driver level and global behavior. The most famous one is the Car-Following model particularly optimal velocity model [5], where the driver adjusts his or her acceleration according to the conditions in front. In that model the vehicle position is treated as a continuous function and each vehicle is governed by an ordinary differential equation that depends on speed and distance of the car in front. In this work, we discussed and gives a detailed analysis of extended optimal velocity models OVM, FVDM, and VSDM. Then we proposed to modify the VSDM model by introduces a new optimal velocity function using the safely indicator inverse of time to collision which takes into account the both of spacing and the relative speed.
The rest of the paper is organized as follows: Sect. 2 gives a short discussion of previous car-following models particularly optimal velocity model. Section 3 presents the modified velocity-separation difference model (modified VSDM in short). Simulation results are presented in Sect. 4.
2 Optimal Velocity (OV) Model and Some Extended Models
The optimal velocity (OV) model is one of the traffic flow models, which has been put forward by to describe some realistic features [6]. OV model may be one of the most representative car-following models for its simplicity and good performance. Generally the microscopic model with continuous variables is expressed by the equation of motion:
where \({\text{X}}_{\text{n}}\), \({\dot{\text{X}}}_{\text{n}}\), \({\text{S}}\left( {\text{t}} \right) =\Delta {\text{X}}_{\text{n}} = {\text{X}}_{{{\text{n}} + 1}} - {\text{X}}_{\text{n}}\), and coefficient k are position, velocity, headway of the n-th car, and sensitivity respectively. Equation (1) simply states that the acceleration of the n-th car is decided by the motion of the n-th car and the surrounding traffic, i.e. the headway, velocity, and position of the preceding car and those of the car that follows and so on. The car-following models are based on the idea that the dominant part of stimulus comes from the preceding car [7]. Along this idea, the equation of motion (1) can be simplified. In this paper, we presented three models that are constructed in different viewpoints with respect to the behavior of a driver: How a driver controls his car.
2.1 Model 1: Optimal Velocity Model Proposed by [6]
In the OV model, the acceleration of the n-th vehicle at time t is determined by the difference between the actual velocity, \({\dot{\text{X}}}_{\text{n}}\), and an optimal velocity \({\text{V}}_{\text{opt}} ({\text{S}}\left( {\text{t}} \right))\), which depends on the headway S(t) to the car in the front. The equation of motion is:
The optimal velocity function \({\text{V}}_{\text{opt}} ({\text{S}}\left( {\text{t}} \right))\) is a monotonically increasing function and has an upper bound. The purpose of this paper is to evaluate and clarify the dynamical changes of traffic states using optimal velocity function in traffic system. The choice of the optimal velocity function is crucial to achieve the goal of research. Here we adopt the optimal velocity function calibrated by using actual measurement data as follows [8]:
2.2 Model 2: Full Velocity Difference Model Proposed by [9]
Simulation results show that the OV model produces too high acceleration and unrealistic deceleration, and crash phenomenon may be appeared. The authors [8] proposed Generalized Force Model (GFM) to avoid these problems. Based in this theory, the velocity difference is appended to the OV model when the velocity of leading car is smaller than the following [10]. In 2001, [9] conducted a detailed analysis of GFM and found out that it cannot predict correctly the delay time of car motion when using GFM. They thought it was due to that GFM does not take the effect of positive \(\Delta \dot{X}\) on traffic dynamics into account, and then they suggested a full velocity difference model (FVDM) which includes the positive \(\Delta \dot{X}\) factor and obtained a more systematic model as follows:
2.3 Model 3: Velocity-Separation Difference Model (VSDM) Proposed by [5]
In 2006, Li Zhi-Peng et al. [5] conduct that the second term in the right side of FVDM of (4) makes no allowance of the effect of the inter car spacing independently of the relative velocity. However, they proposed to separate between cars because it plays an important role in traffic dynamics. They justified that the acceleration controlled by a driver is different when he responds to two different stimuli which have the same relative velocity but different headway. According to the above analysis, they modified the FVDM by taking the separation between cars into account. Since this model takes velocity difference dependent on separation into account, they call it a velocity-difference-separation model (VDSM). The dynamic equation as follows:
where \(\Theta (.)\) is step function.
3 Proposed Model
In this paper, we proposed to modify VSDM that takes velocity difference dependent on separation into account using a new optimal velocity function (OVF). The selection of the OVF thus depends on a users choice. However, this choice cannot be completely arbitrary since the OVF must satisfy several analytical conditions to describe the observed relation between spacing and velocity. The OVF should be a continuous non-negative function defined for \(S(t) > 0\) and must be a monotone function [11]. In this work, we using a new OVF introducing a weighting factor that depends on the ratio of the relative speed to spacing proposed by [12], that is the opposite of the inverse of time to collision (TTC). In Ref. [12], the authors used this new optimal velocity function to modify OV model. In our case, we used this new one to modify VSDM model to make it more reactive on braking state. The optimal velocity function (3) is thus changed to \(V_{opt}^{new} (S,\dot{S})\) given by:
where the weighting factor is:
We extended VSDM model by incorporating the new OVF that combined between the simple OVF and the concept of inverse time to collision to get a novel model that called a modified VSDM model is expressed by the equation of motion:
We proposed in Fig. 1 a modified VSDM car-following model that uses the new optimal velocity function introducing the weighting factor. However, the weighting factor introduces the inverse of time to collision as a very important safely indicator using in braking state.

Modified VSDM Car-following algorithm
In order to do numerical analysis, we rewrite the second-order ODE of modified VSDM (8) as a system of first-order ODEs. Let \(x_{1} = X\) and \(x_{2} = \dot{X}\) are position and velocity respectively.Let \({\text{x}} = \left( {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ \end{array} } \right)\) the vector depending on position and velocity of each car and \({\text{f}}\left( {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ \end{array} } \right) = \left( {\begin{array}{*{20}c} {x_{2} } \\ {g(x_{1} ,x_{2} ,p)} \\ \end{array} } \right)\) the function to resolve of first-order ODEs. Where p = (t, x, k, \(v_{0}\), l, A, \(C_{1}\), \(C_{2}\), \(V_{1}\), \(V_{2}\), C, B, \(\lambda\)) parameters used in a simulation.
where
4 Simulation
In these simulations we used ODE45 in Matlab which uses Runge-Kutta methods to solve systems of ordinary differential equations to find the position and velocity of each car. The parameters values used in (3) are \(V_{1} = 6.75\,{\text{m}}/{\text{s}}\), \(V_{2} = 7.91\,{\text{m}}/{\text{s}}\), and \(C_{1} = 0.13\), \(C_{2} = 1.57\). The parameters values used in (7) are B = 5 s, \(C = 0.4\,{\text{m}}^{ - 1}\), and A = 1/2. The sensitivities coefficients are \(k = 0.85\), \(\lambda = 0.4\).
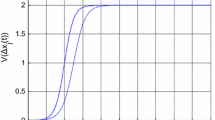
Figure 2 simulate the motion of car using VSDM and MVSDM model. Figure 3 illustrates the time evolution of the speed of both VSDM and a modified VSDM vehicles. The simulation result shows that the vehicle velocity maximum of modified VSDM reach 8 m/s, however, the vehicle velocity maximum of VSDM reach 14 m/s. We deducted that the maximum of speed of a modified VSDM under the maximum of speed that related to VSDM model. MVSDM velocity begins to decrease before the VSDM vehicle velocity reaches its maximum. This due to introduction of weighting factor which used the inverse of time to collision which reduces the optimal velocity and make it the model more reactive in braking state.

Position of motion of car using VSDM and MVSDM models

Velocity of car using VSDM model and MVSDM models
5 Conclusion
Microscopic traffic flow model described a traffic flow in a realistic manner. In this paper we describe a VSDM model used a optimal velocity function and we compare them with a modified VSDM model that introduce the new optimal velocity function based on weighting factor which depending on spacing and relative speed for control a braking situations to avoid a collision.
References
Lighthill, M. J., Whitham, G. B.: On kinematic waves. II. A theory of traffic flow on long crowded roads. Proc. R. Soc. Lond. (1955)
Serge, P., Piet,. B: State-of-the-art of vehicular traffic flow modeling. Special Issue on Road Traffic Modeling and Control of the Journal of Systems and Control Engineering (1999)
Sadeq, J.: New Models for Crowd Dynamics and Control. Faculty of the Virginia Polytechnic Institute and State University. Thesis, Blacksburg, Virginia (2006)
Mark, B., Mike, M.: Car-Following: A Historical Review. Department of Civil and Environmental Engineering, Transportation Research Group, University of Southampton (2000)
Li, Z., Gong, X., Liu,Y.: A Velocity-Separation Difference Model for Car-Following Theory and Simulation Tests. Department of Control Science and Technology, IEEE (2006)
Bando, M., Haseb, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Dynamical Model of Traffic Congestion and Numerical Simulation, vol. 51. Aichi University (1995)
Nakayama, A., Haseb, K., Sugiyama, Y.: Optimal Velocity Model and Its Applications. Gifu Keizai University, Ohgaki (2003)
Li, Z., Yi, Y.: Study on Traffic States and Jamming Transitions for Two Lane Highway Including a Bus by Using a Model with Calibrated Optimal Velocity Function. The Key Laboratory of Embedded System and Service Computing supported by Ministry of Education, Tongji University, Shanghai, China (2014)
Rui, J., Qingsong, W., Zuojin, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 017–101 (2001)
Liu, L., Zhang, N.: A New Car Following Model Considering the Acceleration of Leading Car School of Economics and Management. Beihang University, Beijing (2010)
Milan, B., Elen, T.: Optimal velocity functions for car-following models. Journal of Zhejiang University-Science A (Applied Physics and Engineering), Faculty of Maritime Studies and Transport, University of Ljubljana, 6320 Portoro, Slovenia (2012)
Mammar, S., Mammar, S., Haj Salem, H.: A Modified Optimal Velocity Model for Vehicle Following. Marne-la-Vallee, France (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Lazar, H., Rhoulami, K., Rahmani, M.D. (2016). A Novel Velocity-Separation Difference Model for Traffic Flow Theory. In: El Oualkadi, A., Choubani, F., El Moussati, A. (eds) Proceedings of the Mediterranean Conference on Information & Communication Technologies 2015. Lecture Notes in Electrical Engineering, vol 381. Springer, Cham. https://doi.org/10.1007/978-3-319-30298-0_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-30298-0_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-30296-6
Online ISBN: 978-3-319-30298-0
eBook Packages: EngineeringEngineering (R0)