
Abstract
This paper presents a novel approach for testing structural component to nonlinear vibrations. Nowadays, nonlinear testing is mainly carried out by using electromagnetic shakers. These are efficient and powerful excitation systems which transmit the force by a rigid stinger and can be driven by different excitation signals. The rigid connection contributes to create mechanical impedance mismatch between the shaker and the test structure thus reducing the efficiency of the driving force. An alternative solution to shakers is represented by use of a pulsed air jet excitation method, which drives the force by a pulsed air-jets and therefore contactless. This condition eliminates the mechanical impedance mismatch with the test structure and the excitation can be more efficient than the one created by shakers. The pulsed air-jet excitation system is used to study nonlinear vibrations of composites components. These were designed to be mock-ups of fan blades the layup of which was varied for the three types of components used in this work. Tests were carried out by performing forced response and free decay measurements. The free decay type of test revealed interesting results and the novelty of using such an exciter for nonlinear testing. The major novelty consists of interrupting the air flow from a steady state condition and let happen the free decay, all these without experiencing undesired dynamics as experienced by contact excitation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
15.1 Introduction
In recent years, there has been an increasing interest in studying the behaviour of structures presenting nonlinearities [1]. This is primarily due to the increased use of new materials such as composites. For example, over 50 % of the structural components of the Boeing 787 and Airbus 350 XWB are made of composite materials [2], which are inherently more flexible and less damped, being therefore more prone to nonlinear behaviour. Hence, the understanding of their performance under operating conditions, especially when extreme loads are present, has become increasingly important. Different methodologies have been used to get a deeper insight into the dynamics of nonlinear systems [3]. This paper focuses in particular on the nonlinear resonant method (NL-RDM) and on the experimental testing apparatus and procedure supporting this identification method. The NL-RDM was firstly presented in 2001 [4] and refined in subsequent works [5, 6]. The method uses responses obtained from burst or narrowband excitation of the structure at the natural frequency of the mode of interest. When the excitation ends, the responses are allowed to decay freely. Only the concerned mode and the modes nonlinearly coupled to it contribute to the response, allowing the nonlinear identification of the mode itself. Such an approach proves effective to analyse structures that are linear at low vibration amplitudes, but show increasingly larger active elements of nonlinearity at higher excitation levels. This is the case of many industrial structures. The nonlinear resonant method has been applied experimentally to different structures. In [5] Platten et al. characterised successfully the first three modes of a clamped panel structure, in which they had introduced a distributed nonlinearity by stretching the panel’s middle surface. In [6] the same authors identified the first five modes of an aircraft like wing/store/pylon structure with discrete hardening stiffness nonlinearity introduced in the pylon. In these works, electrodynamic shakers were rigidly connected to the test structures to provide the burst excitation required by the method. More recently, Londono et al. [7] applied a modified version of the method to a single-degree-of-freedom system represented by a base-excited mass mounted on bearings sliding with low friction along steel shafts. The mass was also connected to two preloaded transversal springs which produced nonlinear stiffness. In all these cases, contact excitation provided by shakers is employed to drive each mode separately. This can be an issue [5] since the force is not in phase with the driving voltage and tuning is affected by the severe shaker-structure interaction. Consequently, second harmonics appear in the force signal. Furthermore, when the excitation ends, the stinger is still attached to the structure thus possibly affecting its dynamic behaviour. In order to overcome the problems related to the interaction between the test structure and the excitation device, in this paper a different contactless excitation method is proposed. Compressed air is used to generate a flow which is then chopped by a spinning disc with a series of holes drilled in it. The excitation frequency is therefore given by the number of holes and the rotation speed. After the sudden interruption of the airflow, the responses are allowed to decay freely and without constraint to the excitation system. The paper is organised as follows. Section 16.2 describes the pulsed-air excitation system proposed in this work. Section 16.3 reports the design and realisation of the composite blades used in the experiments. Forced and free-decay responses obtained during the tests are presented in Sect. 16.4 together with a description of the procedure used for signal processing.
15.2 Pulsed Air Jet Excitation System
This section will present a contactless excitation system which works by using compressed air. Figure 15.1 shows the schematic of the excitation system. It is rather simple mechanism based on compressed air flowing into a plenum chamber throughout an orifice. A spinning disc, designed with several holes, opens and closes the orifice thus generating air-jets. The dynamic range of the exciter is given by the capacity of electric motor (max velocity) and by the number of holes on the disc. The actual excitation frequency is given by the following equation:
where, ω n is the excitation frequency, Ω rotational speed of the disc and n DH the number of holes designed for the disc.

(a) Mechanical scheme of pulsed air-jet system and (b) the operating principle
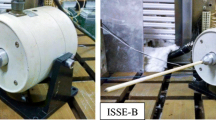
Several measurements to experimentally quantify the influence of some design parameters were carried out. For example, the ducting (comprising of orifice, sampling hole and nozzle) or the addition of a double nozzle were presented in [8]. To characterize the excitation force with respect of the measured pressure at the nozzle and the excitation frequency, a small test rig was configured as shown in Fig. 15.2. The nozzle was once addressed over the pressure gauge and once over the load cell. The test was repeated at different excitation frequencies. The results are plotted in Fig. 15.3.

Test rig for force vs. pressure characterization

Relationship between excitation force, pressure and excitation frequency
The excitation system, as presented in here, has got some useful features but also some disadvantages. In fact, the pulsed excitation generates harmonics at multiple of the fundamental one. This can determine some undesired effects like parasitic excitation, where some vibration contents can be summed to the one excited by the fundamental tone. However, this is expected and can be monitored accordingly.
The goodness is in its contactless feature which can make the system very convenient when a ramp-down test is aimed. The exciter can generate a steady-state vibration and that is sustained as long as the compressed air flows throughout the system. A free decay can be therefore obtained by abruptly interrupting the airflow, thus letting the vibration of the component to decay. This approach was used to characterize the nonlinear response of cantilever composite blades. The free decay is inherently a challenging type of testing because the excitation source cannot be disconnected so easily from the test structure. If the exciter, such as a shaker, is left connected then its dynamics can influence the results. This is more plausible when high amplitude levels are aimed for.
15.3 Design and Manufacturing of the Composite Blades
In this section an outline of the considerations, analyses, constraints, and decisions made about how to design the composite blades object of this work is presented. Manual envelope bagging technique is explained as applied to the actual manufacturing of the components. Difficulties encountered in manufacturing the blades are explained and the methods used to solve them are detailed.
15.3.1 Design Considerations
The objective was to excite geometrically nonlinear vibration and so one side of the blade was thought to be straight, whereas the other one was designed so as to create an angle of 90°+ β between the edge and the base. Different twisting angles θ, thicknesses s, and blade length L were examined in finite element analyses. The following values of the aforementioned parameters were all modelled, see Table 15.1.
The mode shapes of interest in the analyses were the 1st flexural, the 1st torsional, and the 2nd flexural. From finite element analyses it was possible to notice that a blade long 100 mm would be too stiff and have too high natural frequencies as the frequency range of interest was up to 400–500 Hz because of the difficulties to properly excite the vibration and measure it with higher natural frequencies. Moreover some combinations of parameters led to natural frequencies that were too close one another; it would be then difficult to analyse the dynamics of such a structure as it would not be allowed to use the 1DOF approximation. Since it was subsequently known the composite roll was 300 mm in width it was evident that a blade long 500 mm would not optimise the nesting during the cutting of the composite plies. A flat area long 54 mm was thought to be adequate to properly clamp the blade during vibration tests. The length of 280 mm optimised the cutting process by reducing the waste during cutting. Thus, either to reduce the composite waste or to have natural frequencies of the first three mode shapes in the range of interest, the possible length had to be close to 300 mm. A 10°-twisting-angle was deemed too small to be practically realised and the 20° value for the twisting angle was chosen. The trapezoidal angle was chosen to be 5° as it seemed to lead to better mode shapes. Since the blade had to contain 4 ply drops, with a consequently change in thickness of 0.5 mm (being each ply 0.125-thick), a 3 mm-thickness was more adequate to experience such a change; moreover the flat rectangular specimens with ply drops previously tested during another research project were 3 mm-thick and the thickness change created no problems so that it was thought to be expedient to use such a previous validation. Final choices for the parameters of the blade can be seen in Fig. 15.4.

Definitive dimensions for the composite blade
Three different layups were made so as to test the different dynamics with varying fibre directions. Since subsequent fatigue tests would be carried out by exciting the specimens at the 2nd flexural mode, the ply drops were not located on the surface of the blade as the bending normal stress is maximum in that area, but two full plies were allowed to be present in the zone of maximum stress. Since each ply has an after-cured-thickness of 0.125 mm, 24 plies were used for the three specimens. The chosen stacking sequences were symmetric across their mid-plane in order to exhibit no coupling between bending and extensional responses; one important practical implication is that such laminates do not have a tendency to bend or twist from the inevitable thermally induced contractions that occur during cooling following the curing process. The fibre orientations were unidirectional 0°, cross-ply [0/90]s and balanced angle-ply [+45/−45]s. Cross-ply laminates exhibit no coupling either between shear and extensional response and between bending and twisting response. A symmetric angle-ply laminates does not have shear-extensional coupling effects.
After making the first blade a problem became evident; the area designed to be flat so as to be properly clamped during vibration tests was not sufficiently flat. In fact, the bottom surface, which was in contact with the mould, appeared completely flat whereas the top surface experienced a slight curvature that impeded a correct clamp of the blade. Thus, the first blade manufactured was not deemed adequate to be experimentally tested. In a second attempt the aforementioned problem was solved by means of a top plate that was cut and applied on the composite during the curing cycle in order for the blade to have both surfaces under compression. In this way, a uniform pressure could be exerted on the root of the blade during the autoclave cycle and both bottom and top surfaces were perfectly flat.
15.4 Experimental Work
In order to carry out forced response analyses it was decided to use only contactless methods for both the excitation and the measurement systems. The test rig was made as shown in Fig. 15.5 where the exciter is positioned at the top left corner of the specimen. This way all 3 modes could be excited. As can be seen from Fig. 15.5, the blade was clamped to a specific base designed in order to provide very accurate clamp, hence reducing the possibilities of the presence of contact nonlinearities and energy dissipation in the clamp. A guillotine was placed in front of the airflow in order to cut the air in following decay analyses. A nozzle was used to bring the flow as close as possible to the excitation point so as to create as much a homogeneous fluid dynamics as possible. The vibration velocity was measured by means of a Polytec PSV400 Laser Doppler Vibrometer with sensitivity of 2 m/s/V in the single-point mode of use.

Text fixture, blade and exciter’s nozzle
The scanning head was set outside the anechoic chamber containing the blade and exciter. Since detection of superharmonics in nonlinear vibration was one of the goals of the subsequent decay analyses, a low pass filter was set at a high frequency (20 kHz) to allow the investigation of a wide range of frequency content in the signal.
In order to increase the reflection from the surface of the blade, reflective tape was used at the point of measurement. The forced response was acquired by using a LabVIEW programme and the frequency of excitation was set by using a control panel for regulating the speed of the electric motor of the exciter. By regulating the airflow by means of opening or closing the flow control valve of the chopped air machine, different excitation intensities were adopted in order to characterise the behaviour of the 1st flexural, 1st torsional, and 2nd flexural mode shapes of the three different layups at increasing displacements. After localising the resonant frequencies, tests were carried out on each of the first three mode shapes by exciting each blade in a frequency range around its natural frequencies and repeating the tests at different levels of excitation (i.e. different airflow intensities).
15.4.1 Experimental Results
The following graphs summarise the global measured forced responses and give the natural frequency change with regard to the measured amplitude of the displacement.
15.4.1.1 Unidirectional: 1st Flexural Mode
The 1st flexural vibration of the unidirectional 0°-angled blade has been studied by means of exciting the component around its linear natural frequency (74 Hz) with six increasing airflow intensities. From forced responses (Fig. 15.6a) it can be seen that even with the lowest excitation intensities the amplitude of the vibration of the unidirectional blade at the first mode shape was extremely high. The behaviour of the blade vibrating with the 1st flexural mode shape is evidently linear as there is no significant frequency variation with varying amplitude even if the displacement becomes very large as can be seen from backbone curve in Fig. 15.6b.

First bending mode. (a) Forced responses of the unidirectional blade during vibration at its first flexural mode with six increasing intensities of airflow (labelled “int”). (b) Backbone curve of the unidirectional blade undergoing linear vibration at its first flexural mode with six increasing loading intensities
15.4.1.2 Unidirectional: 1st Torsional Mode
The vibration of the 1st torsional mode of the 0° blade is extremely singular and markedly nonlinear. Nine increasing airflow intensities were investigated so as to be able to fully characterise such a varying behaviour. From Fig. 15.7a it can be seen that jump phenomena start to appear when the peak of the vibration approaches the value of the thickness of the blade (i.e. 3 mm) and the vibration abruptly changes its intensity. This is coherent with the known consideration that significant nonlinearities most often appear when displacement is comparable to the thickness. From Fig. 15.7b, which represents the backbone curve of the vibration, it can be noted that vibration changes its behaviour as displacement approaches 1.5 mm from a hardening nonlinear type of vibration to a softening nonlinearity underlining a change in the laminate stiffness.

First torsional mode. (a) Forced responses of the unidirectional blade during vibration at its first torsional mode with nine increasing intensities of airflow. (b) Backbone curve of the unidirectional blade undergoing nonlinear vibration at its first torsional mode with nine increasing loading intensities
15.4.1.3 Unidirectional: 2nd Flexural Mode
Differently from the first flexural mode the 2nd flexural mode exhibits a strong hardening behaviour; in Fig. 15.8a jump phenomena are also evident starting at around 1.5 mm. Backbone curve in Fig. 15.8b shows natural frequency increasing with increasing vibration amplitude.

Second bending mode. (a) Forced responses of the unidirectional blade during vibration at its second flexural mode with seven increasing intensities of airflow. (b) Backbone curve of the unidirectional blade undergoing nonlinear vibration at its second flexural mode with seven increasing loading intensities
15.4.2 Free Decay Procedure and Signal Processing
The following experimental procedure was used in order to characterise the behaviour of free decay responses. By using the same experimental equipment as those used for the forced response tests, the airflow was cut by using a guillotine and the vibration was acquired via LDV system during free decay. The so-acquired velocity signal was integrated to give the displacement and then analysed by using a spectrogram, also called sliding Discrete Fourier Transform, meaning that the frequency content was derived by using Fast Fourier Transform algorithm applied to a sliding window over time. Thus, it is possible to visualise either the frequency content and how different frequencies appear and disappear in the signal during the decay. Discrete Fourier Transform over the entire decay time was also applied to have an idea of how strong each frequency component in the signal was. After isolating the fundamental frequency of vibration by means of a second-order band-pass filter to adopt a one-degree-of-freedom model, the logarithmic decrement of the decay was computed and the damping ratio associated with the excited mode shape was analysed as a function of amplitude for those modes which had a viscous-like damping. The entire procedure was made up of the following steps and repeated at different levels of excitation.
Acquiring the decay signal of the velocity from Polytec LDV system as shown in Fig. 15.9.

Acquisition of the velocity decay from Laser Doppler Vibrometer
Integration of the velocity in order to obtain the displacement signal. Computing the spectrogram (i.e. sliding Discrete Fourier Transform with Hamming windowing) of the signal to visualise the frequency content present during the decay, see Fig. 15.10. Computing DFT over the entire signal to visualise the strength of each frequency component in the signal, see Fig. 15.11.

Sliding DFT computation with Hamming windowing

Computation of the Discrete Fourier Transform of the acquired signal to visualise how strong frequency component are
Applying a band-pass filter to isolate the fundamental frequency associated with the externally excited mode shape, see Fig. 15.12.

Application of band-pass filter to isolate the fundamental resonant frequency associated with the excited mode
Dividing the filtered signal in its positive and negative branches and envelope detection by means of peak recognition, see Fig. 15.13.

The signal is divided in its positive and negative part in order to compute both the decay rates by means of peaks detection
Computation of the logarithmic decrement and subsequently the damping ratio as shown in Fig. 15.14.

Damping ratio computation as a function of the amplitude of vibration
The proposed procedure was applied to different excitation levels. The following section will present some results obtained by using this procedure.
15.4.3 Free Decay Experimental Results
15.4.3.1 Unidirectional: 1st Flexural Mode
Figures 15.15, 15.16 and 15.17 show the time decay signal for three different excitation forces. The 1st flexural mode associated with the unidirectional blade is confirmed to be strongly linear as no superharmonics appear in the frequency spectrum (Fig. 15.18) and damping phenomenon is uniquely viscous-like damping (i.e. exponential decay). The logarithmic decrement and subsequent damping ratio underline a tendency to an increase in the damping values with increasing amplitude level (Fig. 15.19).

Displacement decay of the unidirectional blade vibrating at first flexural mode. Decay intensity 1

Displacement decay of the unidirectional blade vibrating at first flexural mode. Decay intensity 2

Displacement decay of the unidirectional blade vibrating at first flexural mode. Decay intensity 3

Frequency spectrum shows no nonlinearities. Decay intensity 3

Damping ratio linearly increases with increasing vibration amplitude
15.4.3.2 Unidirectional: 1st Torsional Mode
The first torsional mode associated with the unidirectional blade is confirmed to be strongly nonlinear by the presence of at least four superharmonics in the decay signal at the highest intensity, as shown in Fig. 15.20. The intense presence of the frequency associated with the first flexural mode in the frequency spectrum of the signal (Fig. 15.21) may indicate a 1:4 internal resonance phenomenon between the torsional (305 Hz) and flexural (74 Hz) modes in which energy is transferred by means of a nonlinear coupling from external resonance of the torsional motion to internal resonance of the flexural motion. From Fig. 15.22 it can be seen that as the time elapses and vibration amplitude is successively damped out causing the displacement to decrease over time, only the first flexural resonance appears. This indicates that even if the forcing frequency from which the decay starts was set at the torsional resonance, at small displacements energy is transferred to lower mode shapes.

Velocity decay of the unidirectional blade vibrating at first flexural mode. Decay intensity 4

Frequency spectrum shows four superharmonics of the torsional fundamental frequency and an intense presence of the first flexural natural frequency. Decay intensity 4

Sliding frequency spectrum over time clearly shows vibration damps out the superharmonics during the decay as time elapses and vibration amplitude decrease. Decay intensity 4
15.4.3.3 Unidirectional: 2nd Flexural Mode
The 2nd flexural mode of the 0° blade is confirmed highly nonlinear by the presence of four superharmonics in the signal at the highest excitation intensities (Figs. 15.23 and 15.24). Interestingly, the damping phenomenon changes from viscous damping at small amplitude vibration (Fig. 15.25) to Coulomb-like damping at high displacement (Fig. 15.26) introducing further nonlinear behaviour.

Frequency spectrum shows four superharmonics of the second flexural fundamental frequency. Decay intensity 4

Sliding frequency spectrum over time clearly shows vibration damps out the four superharmonics during the decay as time elapses and vibration amplitude decreases. A wide frequency range is present in the signal indicating extremely strong nonlinear behaviour. Decay intensity 4

Displacement decay of the unidirectional blade vibrating at second flexural mode with small amplitude. Damping can be approximated by a viscous model. Decay intensity 1

Displacement decay of the unidirectional blade vibrating at second flexural mode with large amplitude. Damping can be approximated by a dry friction model. Decay intensity 4
15.5 Conclusions
The pulsed air-jet excitation system is used in this work for inducing high vibration amplitudes of composites components. Despite this system was designed for High Cycle Fatigue testing thanks to its contactless feature, it was understood that such a feature could be well exploited for nonlinear testing. The major advantage is to allow steady state conditions at any excitation frequency and from which a free decay can be initiated. The same system can be also used for forced response testing. Some staggered composite blades were manufactured and tested in both free-free decay and forced response measurements. The bladed were manufactured by creating three different layups and results of experiments were presented in here. Few drawbacks can be pinpointed and these are the excitation type which is pulsed and not harmonic. This can determine additional excitation components to the fundamental one. The other pitfalls could be seen in the air-jet which is only push and therefore this system would not be suitable for testing under free-free conditions. Nevertheless, the authors believe that the dynamic community should be informed of such an excitation so as to encourage further developments.
References
Worden, K., Tomlinson, G.: Nonlinearity in Structural Dynamics: Detection, Identification and Modelling. IOP Publishing Ltd, Bristol, Philadelphia (2001)
Di Sante, R.: Fibre optic sensors for structural health monitoring of aircraft composite structures: recent advances and applications. Sensors 15, 18666–18713 (2015)
Carri, A., Ewins, D.: A systematic approach to modal testing of nonlinear structures. In: Allemang, R., De Clerck, J., Niezrecki, C., Wicks, A. (eds.) Topics in Modal Analysis Conference Proceedings of the Society for Experimental Mechanics Series, vol. 7, pp. 273–286. Springer, New York (2014)
Wright, J.R., Platten, M.F., Cooper, J.E., Sarmast, M.: Identification of multi degree of freedom weakly nonlinear systems using a model based in modal space. In: Proceedings of the COST International Conference on Structural System Identification, pp. 49–68. Universitätsbibliothek Kassel, Kassel, Germany (2001)
Platten, M.F., Wright, J.R., Dimitriadis, G., Cooper, J.E.: Identification of multidegree of freedom nonlinear systems using an extended modal space model. Mech. Syst. Signal Process. 23(1), 8–29 (2009)
Platten, M.F., Wright, J.R., Cooper, J.E., Dimitriadis, G.: Identification of a nonlinear wing structure using an extended modal model. J. Aircr. 46(5), 1614–1626 (2009)
Londono, J.M., Neild, S.A., Cooper, J.E.: Identification of backbone curves of nonlinear systems from resonance decay responses. J. Sound Vib. 348, 224–238 (2015)
Di Maio, D., Magi, F.: Development of testing methods for endurance trials of composites components. J. Compos. Mater. 49(24), 2977–2991 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Piraccini, M., Di Maio, D., Di Sante, R. (2016). Nonlinear Modal Testing Performed by Pulsed-Air Jet Excitation System. In: Kerschen, G. (eds) Nonlinear Dynamics, Volume 1. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-319-29739-2_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-29739-2_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-29738-5
Online ISBN: 978-3-319-29739-2
eBook Packages: EngineeringEngineering (R0)