
Abstract
This paper presents a methodology of design of a semi-active magnetorheological (MR) valve. The MR valve has been used successfully for a long period of time in many technical applications. When the valve is used as a semi-active element, problems occurred. The application of this valve is limited, mainly due to the slow response time and its low dynamic range. The methodology consists of flow analysis of a non-Newtonian fluid and FEM analysis of a magnetic circuit. A parallel-plate model was used together with Bingham fluid to describe the flow in the valve. A static and transient model of the magnetic circuit was solved by the FEM program Maxwell. The semi-active MR valve design was based on the presented methodology. In our research the magnetic circuit was made from ferrite that significantly reduces the response time of the magnetic field. The valve was designed only to operate only until the velocity at the breaking point of the F-v curve. Therefore, now there is a large dynamic range in this area. It is reasonable to expect that the designed modifications of the MR valve allow us to use this technology in semi-active suspension systems.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Today, modern mechatronic systems cannot do without having the possibility of controlling the damping elements [1]. Active or semi-active damping elements may be present in the system. The semi-active element in a mechatronic system is what controls the damping force. In contrast to the semi-active elements, the active element is able to supply energy to system. However, this introduces the risk of destabilising the system and requires a lot of power to operate. Therefore, semi-active elements appear to be more suitable than active ones. A semi-active element is often known as a fail-safe system. This is because semi-active elements can often operate as a passive system when power failure occurs. The MR valve is a progressive semi-active element in a mechatronic system.
MR valves or dampers are devices which can resize the dissipated energy depending on the current in the coil. An MR valve is usually constructed from coil, which creates a magnetic field, magnetic circuit and MR fluid. The MR fluid is colloidal suspension formed by micron-sized magnetic particles (most often powdered iron) and carrying fluid [2]. Upon the application of an external magnetic field, the MR fluids are able to change their behavior from a fluid state to a semi-solid or plastic state, and back, in a couple of milliseconds [7]. This phenomenon is known as the MR effect. This field-dependent behavior is often represented as a Bingham plastic having a variable yield stress [5]. Thus, it is possible to modify the characteristics of damper. Many authors were involved with the designing of MR dampers; [2], [3] or [4]. These dampers (valves) can be found some seats in automotives [3], in the control of seismic vibrations in buildings [2] or in guns [4]. When these valves are used for fast semi-active control, they are limited by slow time response damping forces on the control signal. For instance, a large seismic MR damper has a time response of under a tenth of a second (0.06 s [2]). This is a very slow response for semi-active control. This delay damping force on the control signal is only to a small extent due to the MR fluid [7]. The MR valve is influenced greatly by its design and material.
The main goal of this paper is to introduce a methodology design for a fast semi-active MR valve. This methodology has not been published yet. On based this methodology has been designed MR valve. This MR valve was designed by 4th year students of Brno University of Technology faculty of Mechanical engineering department Mechanical engineering design in project-oriented teaching.
2 Materials and Methods
2.1 Rheological Model
MR fluids in the presence of a magnetic field exhibit Non-Newtonian behavior [5]. This behavior is often represented as a Bingham plastic with a variable yield stress [5]. The Bingham model is beneficial in the damper design phase due to its simplicity. However, this model does not include all the characteristic of an MR fluid, such as shear thinning [2]. In the absence of a magnetic field we expect Newtonian behavior from the MR fluid [5]. The Shear stress in the Bingham model is given by the equation:
where H is the magnetic flux intensity [A/m], \( \dot{\gamma} \) is the shear rate [1/s], \( \eta \) is the dynamic viscosity in off-state (H = 0 A/m) [Pa.s], \( \tau \) is the shear stress in the MR fluid [Pa] and \( {\tau}_y \) is the yield stress of the MR fluid [Pa].
The MR fluid in a valve is usually flowing across an annular gap. In the design phase, it is more advantageous to use a simplified model. A parallel plate model would sufficiently approximate an annular gap. The error that occurs due to this simplification is less than 0.5 % for the ratio valve geometry h/R <0.2 [2]. The mean velocity of flowing MR fluid in the presence of a magnetic field is given by Eq. (2). This equation includes the plug effect of the MR fluid [6]. The validity of this relation is limited to a laminar flow.
Mean velocity is described by pressure difference \( \varDelta p \)[Pa], length of gap l [m], size of gap h [m] and size of plug \( {y}_0 \)[m]. The size of the plug is determined by the yield stress and pressure difference [6]. Therefore, plug size is especially function of magnetic field.
In the MR valve, MR fluid can flow through two different types of gaps. The first one is a magnetic gap in which it is possible to change the yield stress of the MR fluid. The second one is a simple connection inlet and outlet of the MR valve through geometric constrictions. This type of MR valve is often called bypass. These gaps can be connected in various ways to obtain the required F-v characteristics of the MR valve. The magnetic gap and bypass are frequently connected in parallel. In parallel, the bypass size effects the slope of F-v characteristics. The magnetic gap and MR fluid properties have effect the breakpoint of the F-v curve. The dynamic range of an MR valve is defined as force in on-state divided by force in off-state in at a specific velocity. The dynamic range reaches its maximum point below the breakpoint. After that it is decreasing nonlinearly. The size of the bypass changes the dynamic range and it also moves breakpoint to the higher velocity on the F-v graph.
2.2 Magnetic Model
The magnetic circuits in MR valves are usually made from low carbon steel [2, 3]. However, low carbon steel also has some disadvantages. For instance, this steel is magnetically and electrically conductive. This causes the creation of eddy currents in the material when it the polarity of the current is changed rapidly. Xinchungan [8] published that eddy currents in steel have a significant effect on the response time of an MR valve. Therefore, for a high speed response, steel is unsuitable. For high speed response, material which is magnetically conductive and electrically non-conductive is desirable. This material prevents the creation of eddy currents. Ferrite materials meet these requirements; however their disadvantage is that they have a lower magnetic saturation limit than steel.
Low carbon steel and ferrite materials are nonlinear magnetic materials. Non-linearity is described by the magnetic B-H curve. However, the analytical solution is complicated. Therefore, numerical solution is more suitable and the finite-element program Ansys Maxwell was used for the design of the magnetic circuit. The magnetic circuit was solved as a 2D axisymmetric model. Magnetostatic and transient analysis was performed. An adaptive mesh with maximal error 1 % was used.
In the MR valve analysis, MR fluid MRF-132DG from the LORD company was used. This fluid has a dynamic viscosity \( \upeta =0.112\pm 0.02\;\mathrm{Pa}.\mathrm{s} \) (40 °C) in the off-state [5].
3 Results
The main goal of students was designed MR valve on the presented methodology. The MR valve should achieve a force of 1200 N in on-state at a velocity of 0.15 m/s. Minimal dynamic range of 3.2 was required.
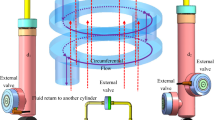
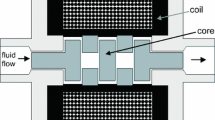
Based on the presented methodology, a rheological and magnetic model of an MR valve was created. The magnetic circuit was designed from ferrite material N95 (1, 5, 8), and the outer tube of the valve (4) was designed from steel AISI 1018 (ČSN 11 523). Steel was also included in the magnetic circuit. This tube was cut longitudinally. The cut surface was electrically insulated. This method reduces the influence of eddy currents on the time response. Other components of the MR valve were designed from aluminum (6, 7). Magnetic (D) and bypass (E) gaps are connected in parallel in the MR valve. MR valve was created from iterative process from these models.
The design of the MR valve has a magnetic gap of size 0.6 mm and length 32 mm. The diameter of the inner cylinder is 30 mm (1). The bypass gap has a diameter of 1.5 mm and length 33 mm (3). The magnetic circuit is composed of three coils. The coils are wound in a way such that everyone adjacent coil has a different winding direction (Fig. 1).

MR valve
Position A and B shows the direction of the magnetic field (winding direction). Every coil includes 150 turns of a 0.6 mm wire (2).
The magnetostatic solution was carried out in Maxwell. Current 1 A in the coil creates a magnetic flux intensity in the magnetic gap of 78 kA/m. This magnetic flux intensity creates a yield stress 24 kPa in the MR fluid 132-DG. Using the transient magnetic solution in Maxwell, the time response of the magnetic field in the valve was calculated. The results show that the time response is less than 2 ms.
Based on the rheological solution, the F-v characteristic of the designed MR valve was determined. A parallel plate model was used (0.6/15 = 0.04). If the piston velocity is 0.15 m/s than the velocity in the bypass gap is 50.2 m/s. The Reynolds number is 2028. Therefore, the flow is laminar (Fig. 2).

F-v characteristic of MR valve
The maximal dynamic range is 14 in the designed MR valve. The presented dynamic range applies to the breaking point.
4 Conclusion and Discussion
This paper deals with the methodology of designing an MR damper. Based on this methodology, students from the Brno University of Technology designed an MR valve. The magnetic circuit in the valve was designed from ferrite material which decreased the response time of the MR valve to less than 2 ms. This MR valve is appropriate to operate under breakpoint on F-v characteristic. This results in a maximal dynamic range. The bypass gap has a major effect on the dynamic range.
The MR valve designed by the students should have a minimal force 1200 N in the on-state at a velocity of 0.15 m/s in the piston. This requirement was met. However, this applies to when it is at a temperature of 40 °C. At another temperature, the damping force will be different. According to the FEM simulation, the MR valve designed by the students can be used for high speed semi-active regulation. The switch from on-state to off-state can be about 500 times per second.
Future research in this area leads to the manufacture and tests on the designed MR valve. The proposed methods will be verified by the manufactured MR valve.
References
M. Unsal, C.D. Crane, C. Niezrecki, Vibration control of parallel platforms based on magnetorheological damping, pp. 1–6 (2006)
G. Yang, B.F. Spencer, J.D. Carlson, M.K. Sain, Large-scale MR fluid dampers: Modeling and dynamic performance considerations. Eng. Struct. 24(3), 309–323 (2002)
S.B. Choi, M.H. Lee, B.K. Lee, Vibration control of MR seat damper for commercial vehicles. J. Intell. Mater. Syst. Struct. 11(12), 936–944 (2002)
Z.C. Li, J. Wang, A gun recoil system employing a magnetorheological fluid damper. Smart Mater. Struct.. 2012, roč. 21, č. 10
M.R. Jolly, J.W. Bender, J.D. Carlson, Properties and applications of commercial magnetorheological fluids. J. Intell. Mater. Syst. Struct. 10(1), 5–13 (1999)
I. Mazůrek, J. Roupec, M. Klapka, Z. Strecker, Load and rheometric unit for the test of magnetorheological fluid. Meccanica 48(3), 631–641 (2013)
F.D. Goncalves, M. Ahmadian, J.D. Carlson, Investigating the magnetorheological effect at high flow velocities. Smart Mater. Struct. 15(1), 75–85 (2006)
G. Xinchun, G. Pengfei, O. Jingping, Study of the response time of MR dampers, in Proceedings of the SPIE 7493, (Weihai, China, 2009). DOI: 10.1117/12.840217
Acknowledgments
This work is an output of research and scientific activities of NETME Centre, regional R&D centre built with the financial support from the Operational Programme Research and Development for Innovations within the project NETME Centre (New Technologies for Mechanical Engineering), Reg. No. CZ.1.05/2.1.00/01.0002 and, in the follow-up sustainability stage, supported through NETME CENTRE PLUS (LO1202) by financial means from the Ministry of Education, Youth and Sports under the “National Sustainability Programme I”.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Kubík, M., Mazůrek, I. (2016). Design of Semi-active Magnetorheological Valve. In: Dynybyl, V., Berka, O., Petr, K., Lopot, F., Dub, M. (eds) The Latest Methods of Construction Design. Springer, Cham. https://doi.org/10.1007/978-3-319-22762-7_8
Download citation
DOI: https://doi.org/10.1007/978-3-319-22762-7_8
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-22761-0
Online ISBN: 978-3-319-22762-7
eBook Packages: EngineeringEngineering (R0)