
Abstract
The use of a Haptic Feedback-System (HFS) in the mechanism design process is very promising. The RePlaLink HFS developed at the IGM - RWTH Aachen University is presented exemplarily. It is a hybrid solution combining a parallel kinematic structure with a small serial actuator in the tool-center. Therefore it is quiet powerful and still agile. Several scenarios of implementation of hand-activated motion are shown. Moreover the way of estimating the operator’s ergonomic comfort and particularly, the advantage of human posture scoring techniques are discussed in detail. Finally, it is illustrated how this HFS can be used as a process driven tool for the superior design process. The simulation capabilities and the haptic real-time display in combination with special knowledge databases concerning the mechanism design and testing are a powerful enhancement for novel as well as senior design engineers. The common work flow can basically be changed, newly arranged and improved.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction and Motivation
1.1 Design Process of Manually Operated Mechanisms and Usage of Haptic Feedback
When people interact with a technical product via a mechanical interface most often it is done by manually operated mechanisms. They are used to guide certain points along a given path as well as for power or signal transmission. The user impression of a product is defined primarily through the interface and the experience of the usage. Besides the technical characteristics of a product, which are sometimes difficult to interpret according to the effect on ergonomics, the personal impression of the interaction is another possibility to compare or evaluate certain products or versions of a product. Crucial for market success of such a product is therefore the perceived ergonomic comfort. The haptic impression is important to differentiate oneself from competitors, especially regarding motion devices. Since this may ultimately affect the purchase decision, huge efforts are made to create a positive haptic perception and to fulfill all ergonomic requirements. For this purpose hand-operated mechanisms often have comfort functions additionally to the basic functionality.
In order to meet the requirements for a human-machine interface and to achieve the goals of human factor design, DIN EN ISO 9241 puts the user in the center of the design activities. Hence the comprehensive understanding of the user and the application scenarios, as well as the inclusion of users throughout the development process is fundamental. The conventional design process according to VDI 2221 [3] can be adapted to the specific requirements of the mechanism design according to [4]. What both procedures have in common is a highly iterative passing through the individual phases, in which the process can be structured. A recurring task is to evaluate the achieved results, not least at the end of a phase and to plan the following work stages accordingly. This can be perfectly enhanced by the user centered approach and the estimation assistance according to DIN EN ISO 9241, compare Fig. 1.

Evaluation of the qualitative synthesis of design in early stages and out of the users perspective is instantly supported or in some cases even enabled by haptic and visual display of virtual prototypes. Moreover it is possible to gain a deeper understanding of the context of usage when using a so called Haptic Feedback-System (HFS). Thereby the requirements can be better understood and specified more exactly.
Since it is generally not easy to evaluate ergonomic aspects, knowledge from multiple fields should be used. Also, in this case, it is hard for users to come to a clear-cut evaluation [5]. To obtain qualitatively high-grade results in a user acceptance study a trial strategy that includes several aspects is needed, see Sects. 3 and 4. Conventionally, mechanical prototypes are used for the haptic representation of hand-driven mechanisms. The demands of a user-centered design process can only be implemented in a worthwhile manner, when financial- and time-requirements of a mechanical prototype can be lowered significantly. Haptic Feedback-Systems can achieve this by simulating a digital prototype of a mechanism and letting the user experience it immediately. Ideally, a system compromises a haptic display of sufficient scale and performance as well as providing tools for the usage of the designer.
1.2 Application Scenarios of Haptic Devices in Design Process
The usage of a HFS as support of the design process of mechanisms is especially advantageous when designing a hand-operated mechanism. It gives the designer a tool to get feedback on the current stage of development. This can be done more often, in earlier stages and in an easier manner than by using conventional mechanical proto-types. It makes no difference if guidance or function-generating mechanisms are in focus. In the everyday life, everybody uses a multitude of mechanisms by hand. A selection is shown in Fig. 2 with a tailgate of a car (a), a window that opens to the outside (b) and a kitchen cabinet (c) Several other examples can be found easily.

Selection of different manually operated mechanisms
All of these examples have in common, that a macroscopic space is needed to operate them. It is striking, that most of the manually actuated mechanisms are planar or can be reduced to a planar mechanism. Hence, a HFS should be designed to cover these application scenarios, see Sect. 2.2. Such a system is capable to reproduce very different hand-operated mechanisms, depending on the simulation model. This can mean the simulation of a finalized product, as well as the simplified functional models in the early development phases. In this way, different paths of movement can be tested by varying the kinematic parameters. Or force potentials in the human workspace can be studied independently of the structure that is being developed.
Furthermore, a great advantage of the HFS is the immediate comparison of different variants of a development with little effort. These variants can arise from different mechanism structures, as shown in Fig. 3(a)–(e) or by a changing in the model parameters of the same structure, which leads mostly to slightly different behavior.

Comparisson of different structural versions of kitchen cabinets
As already described, hand-operated mechanisms often include comfort functions. These can range from passive force assistance by springs to active electrical assistance, from dampers for the end positions to supporting openers. Depending on the requirements and to obtain a lifelike user experience, a HFS must provide a simulation of friction, inertia, elasticity and end stops. The main goal is to achieve an appropriate output, so that, for example, the forces required for manually operating the device are comfortable.
2 RePlaLink – Haptic Feedback-System
2.1 State of the Art of Haptic Feedback Devices
Considering the market review of haptic feedback devices one can determine different device-classes like desktop-devices, teleoperations or hand mounted. They comprise devices of similar workspace and feedback force. Additionally one may take into account further specifications like rigidity, resolution, accuracy or number of degrees of freedom. Devices covering the range of motion and the force potential needed do display a simulation of the above described manually operated mechanisms are hard to find. Hence a customized design of a haptic feedback device is needed [1].
2.2 Characteristics of the RePlaLink-HFS
The Haptic Feedback-System called RePlaLink (Reconfigurable Planar Linkage) is constructed at the IGM and meets the requirements for a haptic simulation system for hand-operated mechanisms, especially the requirements respective to rigidity, workspace and feedback force. Generally, a universally usable HFS should just be able to surpass the sensory capabilities of a human (when simulating an everyday mechanism) as well as to generate the occurring forces and velocities of the simulated application. Haptic perception can be classified in two categories; the sense of touch, tactile sensors in human skin and the sense of position, the kinesthetic sensors in muscles and tendons. While the tactile sensors are very sensitive and can resolve frequencies up to 1000 Hz and have a spatial resolution of up to 0.5 mm, the sense of position is only able to resolve frequencies of 20–30 Hz and angles between 0.8° and 2.5° depending on the joint. A parameter for the evaluation of the perception of force is the just noticeable difference. Depending on the study and the posture it is between three and seven percent. A stiffness of at least 24.5 N/mm onward is classified as a solid by a human. We are capable of movements up to 20–30 Hz at velocities around 1 m/s and forces of 100 N [6–9].
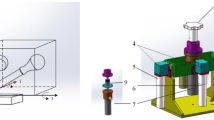
Besides further requirements, the size of the workspace of the HFS plays a crucial role. The output mechanism of the RePlaLink is a partially parallel six-bar-linkage. It includes a fully parallel five-bar linkage with links of round about half a meter, actuated by two servo motors, as shown in Fig. 4. One frame joint and the cranks can be reconfigured. This ensures that the system can be adapted to the needs of the task at hand. For common applications, sufficient workspace is ensured, as well as enough engine power. The parallel planar structure provides a high rigidity, especially perpendicular to the working plane and small masses to accelerate. This leads to an improved dynamical behavior.

Setup of the RePlaLink HFS and local adjustability
Indeed, most applications only use a planar mechanism. But it can be positioned in very different heights relative to the user and vertical or horizontal orientation. That is why adaptability is also required here. Therefore the motor carrier frame of the RePlaLink is mounted on rails in such a way, that the height can be adjusted and it can be pivoted by 90°. Thus, an operation in a horizontal- and vertical-mode in every desired height is possible. See Fig. 5 for a depiction the RePlaLink with an overlaid simulation model.

RePlaLink HFS being used to explore a simulated cabinet (overlaid) and global adjustability.
2.3 Control and Data Processing
Four quadrants can be made out during the operation of a HFS as shown in Fig. 6. The operator interacts primarily kinesthetically with the haptic display, which functions as the input-output-unit of the HFS. The tactile sense is served by the usage of a realistic handle piece. Depending on the control strategy, either the force applied by the user or the position of the handle is measured and used as an input for a dynamical multi body simulation. The user interaction necessitates a real time calculation, since not all the states of the system can be calculated in advance. Subsequently, the reaction of the simulation model is transformed via inverse kinematics or dynamics respectively, in such a way that the signal provided matches the configuration of the output unit. Based on this signal the output unit is controlled. This completes the circle and the user obtains a haptic feedback.

Four basic quadrants of HFS operation (visualization and configuration excluded)
3 Design of Experiments Using a HFS to Estimate Ergonomic Comfort
3.1 Designer and Customer Tests
The classic design process of mechanisms focuses on stability and reliability of the function of the mechanism itself. The accommodation of human operators of mechanisms is usually accomplished by applying principles of ergonomics or human factor design. These principles widen the focus of design to include accessible and safe working spaces and the quantitative calculation and evaluation of static operation forces as well as the design of user interface hardware. The aim of this widened focus is to ensure the capability of the operator to reliable perform the tasks required and the safety of the operator as well as minimizing the risks of musculoskeletal disorders.
Dimensioning According to Human Factors.
Parameters not generally considered by this approach to design are dynamic loads of interfaces of hand-operated mechanisms and the possibility of operational forces concerning their direction. Several standards, e.g. DIN 33411 [10], provide the designer with maximum operating forces or maximum operating torques, often in relation to relative height and reach of the point of application. These maximum forces are usually determined for different directions of the force and angles of the arm or arms. One drawback of those tables is their generation through the use of young test persons in good physical health, omitting the possibility of older operators, as well as the short term and static nature of the forces. In this way dynamic forces are not adequately considered. Also missing is a definition for calculating comfortable operating forces, in magnitude as well as in direction.
Quantifying Comfort and Discomfort.
The German Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (Federal Institute for Occupational Safety and Health) [11] states the maximum continuous operating force to be used as 10 % of the maximum possible force to avoid exhaustion. For smaller muscles and muscle groups this is reduced to 5 %–7 % due to faster exhaustion of smaller muscles. But these too are values provided for medical safety, not directly linked to comfort or discomfort.
3.2 Design of Experiments - Estimation and Quantification
Subjective Assessment.
Comfort can be assessed either subjectively or objectively. A subjective assessment is most easily obtained through employing questionnaires or interviews with test persons. Further possibilities are evaluation of video footage or participative video analysis employing evaluation tools like the CR-10 Borg scale or similar tools as they are used in the Video and Computer based method for Ergonomic Assessment (VIDAR) [12]. Subjective assessment is vital for cross-checking gathered data from objective assessments. If a questionnaire is used it has to be specifically tailored to the task to be evaluated to complement objective assessment of the task.
Objective Assessment.
A more objective way of assessment of comfort or discomfort is provided by methods to evaluate workload or posture. Table 1 list a representative selection of such methods covering several different types based on an evaluation and comparison of several methods by Takala [13]. These methods can be differentiated by several factors. Foremost is the purpose of the method. Most of the methods are used to assess possible health risks, especially musculoskeletal disorders, of lifting tasks, postures or movements. Another possible aim of a method is the assessment of the comfort or more often the discomfort of these lifting tasks, postures or movements. Another way to differentiate between these methods are the observed target exposures. Some of the most widespread methods like the Quick Exposure Check (QEC) [12] or the Health & Safety Executive Upper limb Risk Filter and Risk Assessment (HSE) [12] utilize simple checklists to assess the existence and severity of health risks. These methods are designed for rapid assessment of possible risks, ease of use and to help in making decisions regarding improvements.
Most methods designed to evaluate lifting tasks require additional input to calculate the strain of lifting on the body. Some of the most common, like the National Institute for Occupational Safety and Health Lifting Equation (NIOSH-LE) [12], calculate a risk factor or a recommended lifting weight out of the horizontal and vertical location in relation to the body, the travel distance, angle of asymmetry, the coupling of the grip, task frequency and the weight.
A few methods use the evaluation of movements, like the American Conference of Governmental Industrial Hygienists Threshold Limit Value for Hand Activity Level (HAL TLV) [12], which was designed to evaluate the risk of repetitive hand movement.
Other methods evaluate comfort on the basis of body posture. For the observation and recording of postures two main methods are utilized. One is a comparison with predefined postures or partial postures which have been assessed by medical or ergonomic professionals during the design of the method. A good representative of this kind of method is the Ovako Workload Assessment System (OWAS) [12], a method originally developed to assess the workload of workers in a steel mill.
A second method of recording body postures is the estimation or measuring of joint angles. Two of the user friendliest methods are the Rapid Upper Limb Assessment (RULA) [12] and Rapid Entire Body Assessment (REBA) [12]. Both of these methods are used to observe the joint angles and determine separate risk factors for each joint. Both methods utilize a division of the range of joint movement into two to four segments, associated with their own risk score. These risk factors are then grouped and used to determine a grand score describing the need for improvement of the task. The main difference is that while REBA observes the entire body, RULA only observes the upper body.
Another use of observing the joint angles in a body posture or during movement is the assessment of perceived discomfort. Out of the selection in Table 1, two methods share this aim, the postural loading on the Upper Body Assessment (LUBA) [14] and the Method for Movement and Gesture Assessment (MMGA) [15]. LUBA has been designed for the assessment of body postures using a division of the range of joint movement into four to seven segments similar to RULA. Each of these segments is associated with an increasing discomfort score when deviating further from the neutral position. These scores are added for each section of the upper body; arm, neck and back. This allows for an evaluation of the observed posture regarding the total discomfort and the grading of the perceived comfort, by means of correlation of the LUBA score and maximum holding times of postures. MMGA is based on LUBA and expands the scope of observation. With this method it is possible to assess complete movements of the whole body, not only body postures of the upper body. This is achieved through the measuring of additional joint angles in the lower body and the observation and recording during a movement, usually through motion capturing. Additionally the segments of the joint angles have been converted to splines, enabling the assessment of small angles and changes of the angles. The individual discomfort scores of joints are weighted by the distal bodyweight supported by this joint.
Evaluation of Movement Tasks.
The evaluation of the comfort of movement tasks using hand-guided mechanisms requires a certain set of minimal requirements. These are a measurement of all joint angles in the arm, because the arm usually experiences the most movement and changes of joint angles while operating a hand-guided mechanism. Second would be a precise measuring of joint angles to register small changes. Third is the possibility to assess the posture and its change during movement. These requirements are not all met by either LUBA or MMGA, since MMGA discards several joint angles in the arm. The observation of small changes of joint angles is met by MMGA, while the segmentation of joint angles of the LUBA method is not fine enough to register these changes. Preliminary studies showed that during operation of white goods there were usually no changes in the LUBA score. If the joints reached positions that were assessed uncomfortable by LUBA, the score spiked due to the often rather large difference in the discrete discomfort scores in neighboring segments, limiting the use of this method. The third requirement, the observation of movements was met by MMGA, while LUBA is designed to assess a single body posture.
Customized Method of Evaluation.
Due to these requirements outlined above a new method of evaluation was devised. The method is based partly on the LUBA method and partly on the MMGA. The joint angles observed are based on LUBA (depicted in Fig. 7), covering the upper body. The angles are the flexion and extension of the wrist, elbow, shoulder, neck and back, the radial and ulnar deviation and the supination and pronation of the wrist, the medial and lateral rotation of the upper arm, the abduction and adduction of the shoulder and the rotation and lateral bending of the neck and back.

Observed angles of human movement, more important ones on the right
To complement the objective data a questionnaire has been devised to collect subjective data. This helps to gather impressions and perceived comfort of the operator. This questionnaire is tailored to specific movement tasks using a hand-operated mechanism. Typical questions for the operation of a lift-up flap door on a kitchen cupboard are the possibility to reach the working space of the door, the comfort of reaching specified points of the movement, especially the end. Another important point is the subjective assessment of the magnitude of the operating forces, their uniformity and direction. Directly related to this is the accessibility of the handle and its size. At the same time different modules of the mechanism can be assessed, e.g. dampers, springs, locking mechanisms and supports.
These angles can be measured either by motion capturing, an accurate depth camera (i.e. time of light) or photo and video analysis, depending on available equipment and pace of movement. A photo analysis can be used for mainly static postures, while movements should be registered and measured with the video camera or the other methods. Photo and video analysis should be conducted from at least two different angles at the same time to capture the complete spatial movement and allow the calculation of all joint angles. Another method of registering the joint angles are goniometers attached to each joint. These measuring instruments allow for constant measuring of joint angles but optical measuring has been shown to be less intrusive, allowing for more natural movements and is reasonably accurate.
These angles of the joints enable a calculation of discomfort scores, based on the modification of the LUBA steps into splines similar to MMGA, for every angle. Following this, the same sums are calculated as in LUBA. In addition the development and changes of the discomfort score during the movement are shown, as are maximum deviations. This allows for a more exact evaluation and comparison of movement tasks.
4 HFS as Process Oriented Tools
The HFS is more than just the hardware device. It includes simulation, modelling and visualization. Additionally, the planning, execution and evaluation of the experimental testing are facilitated. The HFS can support the design process as a whole and together with the extension of a suitable software-system it functions as a development environment for hand-operated mechanisms. The advantages of the HFS from a process- and economical-perspective are discussed in [16].
The software system of the HFS can guide the engineer through the development process and can prompt a recurrent evaluation of the design parameters and a validation of the results. Additionally, the data storage can be used in finding solutions to design challenges.
As outlined in the preceding sections, there are a multitude of factors that have to be taken into account when performing a user acceptance study. For the most part these are recurring tasks, since user acceptance studies on hand-operated mechanisms all share similar aspects. Hence, support by software makes sense.
User acceptance testing can aid the development in all phases. The feasibility of a project in principle can be tested in explorative studies. Isolated functions or improvements can be validated during every phase of development and alternative solutions can be compared. In the end, the validated results can be compared with the requirements. [17].
References
Kölling, T., Paris, J., Hüsing, M., Corves, B.: Enhancement of mechanism design process by interaction with haptic feedback-systems. In: Petuya, V., Pinto, C., Lovasz, E.-C. (eds.) Second Conference MeTrApp 2013. Mechanisms and Machine Science, vol. 17, pp. 293–300. Springer, Heidelberg (2014)
Deutsches Institut für Normung: DIN EN ISO 9241-210 Ergonomie der Mensch-System-Interaktion, Teil 210: Prozess zur Gestaltung gebrauchstauglicher interaktiver Systeme. Beuth Verlag, Berlin (2011)
Verein Deutscher Ingenieure: VDI 2221 – Methodik zum Entwickeln und Konstruieren technischer Systeme und Produkte. VDI, Düsseldorf (1993)
Niemeyer, J.: Methodische Entwicklung von Prinziplösungen bei der Auslegung ungleichmäßig übersetzender Getriebe unter Verwendung eines praxisorientierten interaktiven Wissensspeichers. Dissertation, IGM der RWTH Aachen (2002)
Goodman, E., Kuniavsky, M., Moed, A.: Observing the User Experience. Elsevier, Waltham (2012)
Schmidt, R.F., Thews, G. (eds.): Physiologie des Menschen, pp. 216–221. Springer, Heidelberg (1997)
Kern, T.A. (ed.): Entwicklung haptischer Geräte, pp. 97–104. Springer-Verlag, Berlin, Heidelberg (2009)
Hale, K., Stanney, M.: Deriving haptic design guidelines from human physiological, psychophysical and neurological foundations. In: IEEE Computer Science (2004)
Tan, H., Srinivasan, M., Ebermann, B., Cheng, B.: Human factors for the design of force-reflecting haptic interfaces. In: DSC, vol. 55-1; ASME Book No. G0909A (1994)
Deutsche Institut für Normung.: DIN 33411-1 Körperkräfte des Menschen, Teil 1: Begriffe, Zusammenhänge, Bestimmungsgrößen. Beuth Verlag GmbH, Berlin (1982)
Steinberg, U., Liebers, F., Klußman, A.: Manuelle Arbeit ohne Schaden – Grundsätze und Gefährdungsbeurteilung. Bundesanstalt für Arbeitsschutz und Arbeitsmedizin, Dortmund (2014)
Finnish Institute of Occupational Health. http://www.ttl.fi/en/ergonomics/methods/workload_exposure_methods/table_and_methods/Pages/default.aspx
Takala, E.-P., Pehkonen, I., Forsman, M., et al.: Systematic evaluationof observational methods assessing biomechanical exposures at work. Scand. J. Work Environ. Health 36(1), 3–24 (2010)
Kee, D., Karwowski, W.: LUBA: an assessment technique for postural loading on the upper body based on joint motion discomfort and maximum holding time. Appl. Ergon. 32, 357–366 (2001)
Andreoni, G., Mazzola, M., Ciani, O., Zambetti, M., Romero, M., Costa, F., Preatoni, E.: Method for movement and gesture assessment (MMGA) in ergonomics. In: Duffy, V.G. (ed.) ICDHM 2009. LNCS, vol. 5620, pp. 591–598. Springer, Heidelberg (2009)
Kölling, T., Paris, J., Hüsing, M., Corves, B.: Optimierung des Entwicklungsprozesses von handbetätigten Bewegungseinheiten durch Simulation digitaler Prototypen in einem universellen haptischen Feedbacksystem. In 10. Kolloquium Getriebetechnik. Technische Universität Ilmenau, Ilmenau (2013)
Kölling, T., Paris, J., Hüsing, M., Corves, B.: Einsatz haptischer Feedbacksysteme im Entwicklungsprozess von Mechanismen. In: Bewegungstechnik 2014: 17. VDI Getriebetagung, pp. 203–214. VDI-Berichte 2237, Düsseldorf (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Kölling, T., Krees, M., Hüsing, M., Corves, B. (2015). Estimating Ergonomic Comfort During the Process of Mechanism Design by Interaction with a Haptic Feedback-System. In: Duffy, V. (eds) Digital Human Modeling. Applications in Health, Safety, Ergonomics and Risk Management: Ergonomics and Health. DHM 2015. Lecture Notes in Computer Science(), vol 9185. Springer, Cham. https://doi.org/10.1007/978-3-319-21070-4_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-21070-4_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-21069-8
Online ISBN: 978-3-319-21070-4
eBook Packages: Computer ScienceComputer Science (R0)