
Abstract
This work is devoted to finding a solution of Riemann problem for the first order nonlinear partial equation which describes the traffic flow on highway. When \(\rho _{\ell }>\rho _r\), the solution is presented as a piecewise continuous function, where \(\rho _{\ell }\) and \(\rho _r\) are the densities of cars on the left and right side of the intersection respectively. On the contrary case, a shock of which the location is unknown beforehand arises in the solution. In this case, a special auxiliary problem is introduced, the solution of which makes it possible to write the exact solution showing the locations of shock. For the realization of the proposed method, the parameters of the flow are also found.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
As known, to study the flow of vehicles on a highway is one of today’s most contemporary problems. To solve the problem of traffic congestion, it is not enough to intervene at the level of instrumentality. It is essential to the creation of mathematical models to solve such problems. First and considerable researches in this field have been worked through in [1, 4–6].
Let \(\rho (x,t)\) and q(x, t) denote vehicle density per unit length and number of vehicles passing through any highway section per unit time, respectively. In this instance, \(\int _{a}^{b}\rho (x,t_{1} )dx \) and \(\int _{a}^{b}\rho (x,t_{2} )dx \) refer to the numbers of vehicles on any \(\left[ a,b\right] \) section of the highway at times \(t=t_{1} \) and \(t=t_{2} \). Since the integrals \(\int _{t_{1} }^{t_{2} }q(a,s)ds \) and \(\int _{t_{1} }^{t_{2} }q(b,s)ds \) denote the number of vehicles entering into the highway at the point a and leaving at the point b at the time period \(\varDelta t=t_{2} -t_{1} \), respectively, the following balance equation is valid
Applying the mean value theorem to Eq. (1), we get
To investigate the flow dynamics, it is necessary to know the functional relation of the function q with the local density \(\rho \) in Eq. (2). In the process of derivation of the Eq. (2), the physical assumptions below are made
-
1.
The vehicle flux on the highway is sufficiently dense.
-
2.
No vehicles enter into and leave the highway in the region where the vehicles density is high.
-
3.
Driving reflexes are not considered.
2 Finding the Flow Parameters
First, let us formulate the speed of vehicles on the highway. However, the creation of this formula can be obtained based on theoretical and experimental data. To express the speed of a vehicle these formulas can be considered as the first approach.
In the considering interval \(\left[ a,b\right] \), let us suppose that the vehicles are aligned bumper to bumper. In addition, according to the kinematic theory, the flow speed is as follows
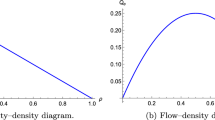
The connection between the speed of vehicle and density is found as
from the equation of the line passing through the points \(A(0,v_{\mathrm{max}})\) and \(B(\rho _{\mathrm{max}} ,0)\). Taking Eq. (3) into account we get
The actual observed number of vehicles on the highway indicate that it is
in a single-lane roads. These numbers for a single-lane highway are accepted as a first approximation. The number of vehicles in a highway can be expressed as the product of these numbers with the number of lanes. According to the observations on the highway, the maximum flow value in low speeds are \(v=\frac{q_{max}}{\rho _{max}}=20 \frac{mil}{hour}\), [6].
Dispersion speed of the wave is
Since \(v'(\rho )<0\), the speed \(c(\rho )\) is less than the speed of the moving vehicles. Since the wave propagates in the opposite direction of the traffic flow, it informs the drivers that there is a problem ahead. The speed \(c(\rho )\) is equal to the slope of curves \(Q(\rho )\), thus the wave propagates forward if \(\rho < \rho _{j}\), and backwards if \(\rho > \rho _{j}\). If \(\rho =\rho _{j}\), in other words \(\rho =\rho _{j}\) takes the maximum value, the wave remains stationary relative to the road.
3 Simulation Model and Its Solution
To analyze the dynamics of traffic flow, we will investigate the equation
with following initial condition
where the numbers \(\rho _{\ell } \) and \(\rho _{r} \) denote the values of the density \(\rho \) at the behind and in front of the jump. Let us assume \(\rho _{\ell } >\rho _{r} \), firstly.
Using the method of characteristics for the solution of the problem (7) and (8) we get
Here, \(\xi \) is the equation of characteristics, and can be written as

Initial condition when \(\rho _{\ell } > \rho _{r}\)
As known from the general theory, when \(\rho _{\ell } >\rho _{r} \) multi-valuable state does not occur in the solution, Fig. 1. Since \(\rho _{\ell } >\rho _{r} \) and \(\rho _{r} \le \rho \le \rho _{\ell } \), all automodel solutions of the Eq. (7) remaining between the lines \(x=\rho _{r} t\) and \(x=\rho _{\ell } t\) are lines crossing the origin, that is, \(\xi =0\), Fig. 2

Characteristics of the Equation (7)
To express a physically meaningful solution of the problem (7) and (8), It is necessary to combine the line
with the lines \(\rho =\rho _{r} \) and \(\rho =\rho _{\ell } \) so that the initial condition is satisfied and the solution is continuous. Therefore we get
-
1.
if \(\xi <0\), then \(\rho =\rho _{\ell }\) and
$$\begin{aligned} \frac{x}{t} <v_{\mathrm{max}} \left( 1-\frac{2}{\rho _{\mathrm{max}} } \rho _{\ell } \right) \!\!, \end{aligned}$$ -
2.
if \(\xi >0\), then \(\rho =\rho _{r} \) and
$$\begin{aligned} \frac{x}{t} >v_{\mathrm{max}} \left( 1-\frac{2}{\rho _{\mathrm{max}} } \rho _{r} \right) \!\!. \end{aligned}$$ -
3.
When \(\xi =0\), using the Eq. (11) we have
$$\begin{aligned} \rho =-\frac{\rho _{\mathrm{max}} }{v_{\mathrm{max}} } \frac{x}{2t} +\frac{\rho _{\mathrm{max}} }{2}. \end{aligned}$$

Graphs of the solution (12)
Taking these expressions into account, we get the solution of the problem as follows
The graph of the solution defined by the expression (12) is shown in Fig. 3.
Now, we will investigate the case where the initial distribution of vehicles are as shown in Fig. 4, where \(\rho _{\ell } <\rho _{r} \). In this case, instead of solving the problem (7) and (8), we need to solve the following problem as in [2, 3]
The problem (13) and (14) is called the auxiliary problem. The solution becomes
The problem (13) and (14) was examined in [2, 3], and it was proven that the expression \(\rho (x,t)=\frac{\partial u(x,t)}{\partial x} \) is the solution of the problem (7) and (8). Here,
and
The characteristics of the problem corresponding to this situation are shown in Fig. 4. According to the general theory, in this case a jump occurs in the solution. Location of the jump is found from the equation as follows
using the equality \(u_{-} =u_{+} \). Taking the expression (18) into account, the solution of the problem (7) and (8) is written as
The graphs of the solution in this case are shown in Fig. 5.

Initial distribution of vehicles and characteristics when \(\rho _{\ell } < \rho _{r}\)
The traffic lights can be regulated using this results. To this end, it is sufficient to establish the graphs of the family of characteristics on the (x, t) plane. They are constant density lines such that, their \(c{} (\rho )\) slopes determine the constant values of \(\rho (x,t)\) taken on these lines. Let us apply the above theory to the green light problem on the traffic. We let \(\rho _{\ell }=\rho _{max}\) and \(\rho _{r}=0\). This case physically refers to the traffic stop as the traffic light turns red at the point \(x=0\). As shown, the vehicles density has a jump at the point \(x=0\). The distribution of the vehicles (initial state) is shown in Fig. 4.

Graphs of the solution (19)
As the traffic light turns green from red, we are required to determine the dynamic distribution of vehicles. According to the general theory,
and remains constant on characteristics. The slope of a characteristic that intersects the x axis at any point \(x=x_0>0\) in the positive direction is given as
The equation of the family of characteristics is given as \(x=v_{max}t+x_0\). On the other hand, the slope of the characteristics that intersects the x axis at any point in the negative x axis direction is
It is obvious that, the equation of the family of these characteristics is written as \(x=-v_{max}t+x_0\).

Family of the characteristics for determining traffic lights
The characteristics settled in the domain \(-v_{max} t< x < v_{max} t\) should have a common point, so \(\frac{dx}{dt}=\frac{x}{t}\). In this case, the equation of the family of characteristics is as shown in Fig. 6.
The traffic flow dynamic that flows slowly across the traffic lights can be seen in Fig. 6.
4 Conclusion
The advantages of the proposed model are listed below:
1. The vehicle density at any point on the highway is specified.
2. Average vehicle speed is determined to estimate the maximum flow of vehicles on the highway.
3. The traffic lights are managed to avoid possible traffic congestion.
References
Lighthill, M.J., Whitham, G.B.: On kinematic waves, i. flood movement in long rivers; ii. theory of traffic flow on long crowded roads. Proc. Royal Soc. London Ser. A 229, 281–345 (1955)
Rasulov, M.: Sureksiz Fonksiyonlar Sinifinda Korunum Kurallari. Seckin Yayinevi, Istanbul (2011)
Rasulov, M., Sinsoysal, B., Hayta, S.: Numerical simulation of initial and initial-boundary value problems for traffic flow in a class of discontinuous functions. WSEAS Trans. Math. 5(12), 1339–1342 (2006)
Richards, P.I.: Shock waves on the highway. Oper. Res. 4, 42–51 (1956)
Siebel, F., Mauser, W.: On the fundamental diagram of traffic flow. SIAM J. Appl. Math. 66(4), 1150–1162 (2006)
Whitham, G.B.: Linear and Nonlinear Waves. Wiley, New York (1974)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Sinsoysal, B., Bal, H., Sahin, E.I. (2015). Investigating the Dynamics of Traffic Flow on a Highway in a Class of Discontinuous Functions. In: Dimov, I., Faragó, I., Vulkov, L. (eds) Finite Difference Methods,Theory and Applications. FDM 2014. Lecture Notes in Computer Science(), vol 9045. Springer, Cham. https://doi.org/10.1007/978-3-319-20239-6_39
Download citation
DOI: https://doi.org/10.1007/978-3-319-20239-6_39
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-20238-9
Online ISBN: 978-3-319-20239-6
eBook Packages: Computer ScienceComputer Science (R0)