
Abstract
Nowadays, new technologies have triggered the needs of new energy sources, smaller and more efficient, so the research about energy harvesting has increased substantially. Several researchers have developed the conversion of wasted mechanical energy to electrical energy using piezoelectric materials as a transducer. This chapter proposes a mathematical model for the constitutive equation of a piezoelectric transducer. Experimental results involving piezoelectric elements were considered. The proposed mathematical model allows a considerably better description. The results are closer to those obtained in a real system, reducing inaccuracy of predictive behaviour of the piezoelectric energy harvesting system. In this work, the numerical simulations show a significant difference between results obtained with the proposed model and other models available in literature.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays, new technologies have triggered the needs of new energy sources, smaller and more efficient. The research on energy harvesting system has increased substantially. Several different devices have been developed. In all these devices, a new way to harvest energy is the use of piezoelectric material as a transducer to harvest energy from ambient mechanical vibrations. Many researchers have recently explored this sort of energy harvesting based on piezoelectric material. As some examples, we mention that the piezoceramics can be used as piezomagnetoelasctic structure and harvest energy from an ambient vibration [1, 2]. A vast and important study of piezoelectric energy harvesting system can be found in [3–5]. These authors explored the reuse of the wasted energy that is very important nowadays to some applications, including renewable energy.
Linear and nonlinear piezoelectric coupling have been considered. The nonlinear coupling incorporates the more realistic effects of the piezo elements, because of the constitutive laws of piezoelectric materials specifically the nonlinear relationship between the strain and the electric field in the piezoceramic material [6–9]. A good approximation to a relation of the nonlinear piezoelectric coupling was firstly developed by Triplett and Quinn [10] that shows good results comparing to the experimental results. Hence, the authors conclude that the role of nonlinearities in the piezoelectric materials has a great impact over the responses of the system. Thus, for better design of an energy harvester, the nonlinear effects of electromechanical coupling must be taken into account [11].
In order to check this, we propose a new approximation of experimental curve of the piezoelectric material response to modelling this behaviour. Using the theoretical model of piezoelectric energy harvesting in [12–14], a comparison was performed among a reference function (RF) proposed by Triplett and Quinn [10] for piezoelectric coupling and the proposed model (PM) by us present in this work.
This chapter is organized into five sections. Section 1 is essentially an introduction to energy harvesting vibrating systems. Section 2 presents the proposed mathematical nonlinear piezoelectric coupling, showing how it can be relevant in the mathematical modelling of the real problem, taking into account the nonlinear coupling proposed by Triplett and Quinn [10]. Section 3 presents the mathematical modelling of the energy harvesting system considering a proposal nonlinear piezoelectric coupling. Section 4 exhibits the results of numerical simulations, those were carried out, comparing the average power using the reference function to the proposed model. Section 5 presents the main conclusion of the work.
2 The Proposed Nonlinear Coupling Term
The piezoelectric element behaviour was checked experimentally by Crawley and Anderson [7] as we can observe in Fig. 1. Figure 1b shows the function to dimensionless piezoelectric coupling coefficient suggested by [10], where the dimensional piezoelectric coefficient d(x) were approximated to: \(d(x)=d_{linear}(1+d_{nonlinear}|x|)\), having defined as the dimensionless counter-party as: \(\hat{d}(x)=\theta (1+\varTheta |x|)\), where the piezoelectric coefficient is constituted by a linear part represented by \(\theta \) and a nonlinear part represented by \(\varTheta \). In Fig. 1a, the nonlinear model curve is the approximation stipulated by Triplett and Quinn [10].

As can be seen in Fig. 1a, neither linear model and nonlinear approximation nor the model of Fig. 1b are good approximations of experimental model. We can also observe that the experimental model try to reach a saturation point, behaviour that is not observed in the models. The goal of this research is to determine a model which has a better mathematical representation of the experimental model. For this, we are going to consider an approximation normalized function \(y=d^*[pmV^{-1}]/408\) and \(x=Microstrain/500\) determined by using the least square method [15, 16]. The method could show us the approximation normalized functions as
In Fig. 2 we can observe a comparison considering the dimensional model proposed in (1).

Proposed model to approximation of piezoelectric nonlinearity
3 Mathematical Modelling
In this section will be shown the energy harvesting mathematical model using a nonlinear piezoelectric coupling and the governing equations of movement of the system.
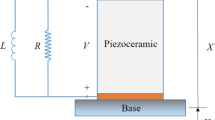
The energy harvesting model in Fig. 3 was proposed in [12–14], that are studied using the proposed nonlinear piezoelectric coupling of Triplett and Quinn [10]. This time, the new nonlinear piezoelectric coupling was used to compare its efficient with the other coupling in [10].
The coupled equations of motion were defined in the dimensionless form in [12–14] as:
The parameter \(\Psi \) in (2) represents the piezoelectric coupling function. The dimensionless electrical power harvested from the system has the form \(P=\rho v^{\prime 2}\). The averaged power harvested is given by

4 Numerical Simulations and Results
In Figs. 4 and 5, we can observe the behaviour of the system (2) for the following parameters [10, 14]: \(\alpha =0.01\), \(\beta =1.00\), \(\beta _1=0.25\), \(\rho =1.00\), \(\varepsilon =0.10\), \(\delta _1=0.40\), \(\delta _2=0.40\), \(\gamma =0.60\), \(\mu _2=1.50\), \(\theta =1.00\), \(\varTheta =1.00\), \(x_1(0)=0\), \(x_2(0)=0\), \(x_3(0)=0\), \(x_4(0)=0\), \(x_5(0)=0\). The \(\mu _1\) parameter had to be adjusted in order to reach the resonant frequency of the model for each of the tested functions.
Figure 4a, b are depicting the resonance curve of the system using the reference function RF, proposed model PM, and as can be seen the jumping occurs for the value of the parameter \(\mu _1=1.55\) and \(\mu _1=1.52,\) respectively.
Figure 5 shows the dynamic response of the system comparing the proposed model PM to the reference function RF proposed in [10]. Figure 5a, b show the phase plane and the time history of the displacement of the two functions, respectively. We observe that the PM starts with a higher amplitude and at steady state keeps a little higher amplitude of displacement than in the RF. To see what happens with the power harvested Fig. 5c, d show the time history of the power harvested and the average power, respectively. We can see the power harvested has higher peaks in the PM than in RF, but it doesn’t occur to the average power. We see that at steady state the average power of the PM is a little lower than the RF. It was expected by the fact shown in Fig. 2 that the PM approximates is closer to the experimental result than the RF. Hence, the energy harvesting would be a little lower in PM than in RF.

a Sommerfeld effect of the system (2). a Reference function. b Proposed model

Dynamic response using the proposed model (blue line) and the reference function (black line). a Phase plane. b Time history of the displacement. c Time history of the harvested power. d Time history of the average power
5 Conclusions
By using the least square method proposed in [15, 16], it was possible to obtain the nonlinear model, Fig. 2, which resulted in an approximation function that considers the operation mode \(d_{31}\), where mechanical strain is applied in the axial direction, but the voltage is obtained from the perpendicular direction. With the application of the proposed model, it was possible to observe the change of the Sommerfield effect (\(\mu _1=1.55\) (RF) for \(\mu _1=1.52\) (PM)). This is an important point because it indicates a reduction in the quantity of energy necessary to the system to achieve the resonant frequency corresponding to of maximum displacement that can harvest more energy.
We also observed in Fig. 5c, d that the curve represented by (1) has a little lower energy harvester forecast as regard to the reference function, indicating that we would be overestimating the power generation in numerical simulations, while the reference function continue to be a good approximation. This is because the overestimated power harvested is just a little part of it, considering the piezoelectric material harvests low amount of energy.
It can be concluded that the obtained results shown the efficiency of the proposed model in improving the prediction of the piezoelectric energy harvested in steady state, thereby correcting the values obtained previously by the reference function, due to a correct matching with the profile of the behaviour of the experimental curve in Fig. 1a.
References
Erturk, A., Hoffmann, J., Inman, D.J.: A piezomagnetoelastic structure for broadband vibration energy harvesting. Appl. Phys. Lett. 94(25), 254102 (2009)
Litak, G., Friswell, M.I., Kwuimy, C.A.K., Adhikari, S., Borowiec, M.: Energy harvesting by two magnetopiezoelastic oscillators with mistuning. Theor. Appl. Mech. Lett. 2(4), 043009 (2012)
Erturk, A., Inman, D.J.: Piezoelectric Energy Harvesting. Wiley, Chichester (2011)
Priya, S., Inman, D.J. (eds.): Energy Harvesting Technologies. Springer, New York (2009)
Stephen, N.G.: On energy harvesting from ambient vibration. J. Sound Vib. 293(1), 409–425 (2006)
Jalili, N.: Piezoelectric-based vibration control. From Macro to Micro/Nano Scale Systems. Springer, New York (2010)
Crawley, E.F., Anderson, E.H.: Detailed models of piezoceramic actuation of beams. J. Intell. Mater. Syst. Struct. 1(1), 4–25 (1990)
DuToit, N.E., Wardle, B.L.: Experimental verification of models for microfabricated piezoelectric vibration energy harvesters. AIAA J. 45(5), 1126–1137 (2007)
Twiefel, J., Richter, B., Sattel, T., Wallaschek, J.: Power output estimation and experimental validation for piezoelectric energy harvesting systems. J. Electroceram. 20(3–4), 203–208 (2008)
Triplett, A., Quinn, D.D.: The effect of non-linear piezoelectric coupling on vibration-based energy harvesting. J. Intell. Mater. Syst. Struct. 20(16), 1959–1967 (2009)
Iliuk, I., Balthazar, J.M., Tusset, A.M., Felix, J.L.P., de Pontes, B.R.: Nonlinear dynamics and control strategies: on a energy harvester vibrating system with a linear form to non-ideal motor torquet. In: MATEC Web of Conferences, vol. 1, p. 08003. EDP Sciences (2012)
Iliuk, I., Balthazar, J.M., Tusset, A.M., Piqueira, J.R., de Pontes, B.R., Felix, J.L., Bueno, Á.M.: Application of passive control to energy harvester efficiency using a nonideal portal frame structural support system. J. Intell. Mater. Syst. Struct. 1045389X13500570 (2013)
Iliuk, I., Balthazar, J.M., Tusset, A.M., Piqueira, J.R.C., de Pontes, B.R., Felix, J.L.P., Bueno, Á.M.: A non-ideal portal frame energy harvester controlled using a pendulum. European Phys. J. Spec. Top. 222(7), 1575–1586 (2013)
Iliuk, I., Brasil, R.M.L.R.D.F., Balthazar, J.M., Tusset, A.M., Piccirillo, V., Piqueira, J.R.C.: Potential application in energy harvesting of intermodal energy exchange in a frame: FEM analysis. Int. J. Struct. Stab. Dyn. (2014)
Tusset, A.M., Balthazar, J.M., Felix, J.L.P.: On elimination of chaotic behavior in a non-ideal portal frame structural system, using both passive and active controls. J. Vib. Control. 19, 803–813 (2013) 1077546311435518 (2012)
Tusset, A.M., Balthazar, J.M., Chavarette, F.R., Felix, J.L.P.: On energy transfer phenomena, in a nonlinear ideal and nonideal essential vibrating systems, coupled to a (MR) magneto-rheological damper. Nonlinear Dyn. 69(4), 1859–1880 (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Tusset, Â.M. et al. (2015). Proposal of a Nonlinear Piezoelectric Coupling Term to Energy Harvesting Interactions. In: Belhaq, M. (eds) Structural Nonlinear Dynamics and Diagnosis. Springer Proceedings in Physics, vol 168. Springer, Cham. https://doi.org/10.1007/978-3-319-19851-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-19851-4_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-19850-7
Online ISBN: 978-3-319-19851-4
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)