
Abstract
We construct a one-dimensional reversible cellular automaton that is computationally universal in a rather strong sense while being highly non-sensitive to initial conditions as a dynamical system. The cellular automaton has no sensitive subsystems. The construction is based on a simulation of a reversible Turing machine, where a bouncing signal activates the Turing machine to make single steps whenever the signal passes over the machine.
Research supported by the Academy of Finland Grant 131558.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Cellular automata (CA) are discrete dynamical systems and models of massively parallel computation, and thus a convenient platform to study the relationship between computation and dynamics. It is clear that too simple dynamics (e.g., periodic systems) cannot support computation, while [7] suggests that too chaotic systems cannot do it either. To study this phenomenon precisely one needs to choose good definitions for “computational universality” and “chaos”. For both concepts, a multitude of choices exist. For universality of discrete time symbolic dynamical systems (such as cellular automata), Delvenne et al. propose a robust definition that does not depend on details of encoding inputs and conditions of acceptance [3]. A central aspect of dynamical complexity, on the other hand, is sensitivity to initial conditions. The most widely used definition of chaos by Devaney [4] requires sensitivity, but also transitivity and denseness of periodic points.
In [6] we proved that there are cellular automata that are Devaney-chaotic and universal, answering a question posed in [3]. So the upper boundary of Langton’s “edge of chaos”, the proper amount of sensitivity that can support computational universality, is not below Devaney-chaos. It remains an interesting question whether increasing sensitivity indeed eventually prevents computation: it would be nice to know, for example, whether an expansive cellular automaton can be universal in the sense of [3].
In this paper we study the lower boundary of the “edge of chaos”. It is trivial to construct a non-sensitive but universal cellular automaton: simply add to any universal CA a new spreading state. The new state is a blocking word that makes the system non-sensitive, but universality remains in configurations that do not contain the spreading state. However, this construction is cheating since the original (possibly sensitive) CA exists as a subsystem. In this paper we construct a cellular automaton that is universal (even in the strongest sense in [3]), and does not have any subsystems that are sensitive to initial conditions. The automaton that we construct is reversible, as is the chaotic one that we presented in [6].
The paper is organized as follows. In Sect. 2 we recall basic aspects of cellular automata and reversible Turing machines, and define the concepts of universality and sensitivity that we use. In Sect. 3 we describe our reversible cellular automaton, and in Sect. 4 we prove that it has the claimed properties of universality and non-existence of sensitive subsystems.
2 Definitions
2.1 Cellular Automata and Sensitivity to Initial Conditions
For a finite set \(S\), the alphabet, we denote by \(S^*\) the set of finite words over \(S\), and by \(S^\mathbb {Z}\) the set of bi-infinite words over \(S\). Elements of \(x\in S^\mathbb {Z}\) are called configurations and their indices \(i\in \mathbb {Z}\) are cells. When writing down configurations we mark the place between cells \(-1\) and \(0\) by a dot, that is, a configuration \(x\in S^\mathbb {Z}\) may be written as
For finite \(E\subseteq \mathbb {Z}\), elements of \(S^E\) are finite patterns with domain \(E\). We denote by \(x_E\in S^E\) the restriction of configuration \(x\) on \(E\) and call it the pattern in \(x\) on domain \(E\). In particular, for \(i\le j\) the pattern \(x_{[i,j]}=x_ix_{i+1}\dots x_j\) is viewed as a finite word of length \(j-i+1\).
The set \(S^\mathbb {Z}\) is equipped with the usual product topology, which makes it a compact space. Each finite pattern \(p\in S^E\) determines a cylinder \(\{x\in S^\mathbb {Z}\ |\ x_E=p\}\) that contains all configurations with pattern \(p\) on domain \(E\). Cylinders are clopen (closed and open) and they form a base of the topology. Clopen sets are precisely the finite unions of cylinders. The shift function \(\sigma \!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\) is the automorphism defined by \(\sigma (x)_i=x_{i+1}\) for all \(x\in S^\mathbb {Z}\) and \(i\in \mathbb {Z}\).
A cellular automaton (CA) is a function \(F\!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\) that is continuous and commutes with the shift \(\sigma \). Equivalently, \(F\) is determined by a local rule \(f\!:S^{2r+1}\longrightarrow S\) of some radius \(r\) as follows:
A bijective CA \(F\!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\) is reversible: the inverse function \(F^{-1}\) is automatically a CA as well.
The pair \((S^\mathbb {Z},F)\) is a dynamical system: a compact space \(S^\mathbb {Z}\) with a continuous transformation \(F\!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\). A topologically closed \(X\subseteq S^\mathbb {Z}\) is said to be \(F\) -invariant if \(F(X)\subseteq X\), and we say that \((X,F)\) is then a subsystem of \((S^\mathbb {Z},F)\). If a topologically closed \(X\subseteq S^\mathbb {Z}\) is also shift-invariant then \(X\) is a subshift of the full shift \(S^\mathbb {Z}\).
Consider an arbitrary subsystem \((X,F)\) of \((S^\mathbb {Z},F)\). The system is
-
sensitive to initial conditions (or simply sensitive) if there exists a finite observation window \(W\subseteq \mathbb {Z}\) such that
$$ \forall _{\mathrm{finite}} E\subseteq \mathbb {Z}, \forall x\in X\!: \exists y\in X, \exists n\in \mathbb {N}\!: y_E=x_E\,\text{ and }\,F^n(y)_W\ne F^n(x)_W. $$In other words, any configuration \(x\) can be modified at arbitrarily distant cells in such a way that eventually the change will be observed inside window \(W\).
-
transitive if for all cylinders \(U,V\subseteq S^\mathbb {Z}\)
$$ U\cap X\ne \emptyset , V\cap X\ne \emptyset \Longrightarrow \exists n\in \mathbb {N}\!: F^n(U)\cap V\cap X\ne \emptyset . $$
Following [4], the system \((X,F)\) is Devaney-chaotic if it is sensitive, transitive and the periodic points are dense. It is known that sensitivity is a weak condition in the sense that it is implied by transitivity and denseness of periodic points [1]. In this paper we construct a CA that is not sensitive and does not have any sensitive subsystems, and hence has no Devaney-chaotic subsystems.
2.2 Universality of Cellular Automata
Computational universality refers to a system’s ability to simulate arbitrary effective processes. This idea needs to be precisely formalized before it can be mathematically treated. It is reasonable to require that the dynamics of the system “solves” some \(\varSigma _1^0\)-complete decision problem, meaning that the halting problem of Turing machines can be many-one reduced to instances of the problem. Delvenne et al. in [3] introduced the following natural decision problem to consider for a cellular automaton \(F\!: S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\) (or more generally, on any discrete time symbolic dynamical system):

So the problem asks if a finite segment of the trace of some orbit with respect to the clopen partitioning is in a given regular language. The CA \(F\) is universal if the problem Trace is \(\varSigma _1^0\)-complete.
We actually consider the more restricted halting problem of dynamical systems, also defined in [3]:

It is clear that if the problem Reach is \(\varSigma _1^0\)-complete, so is Trace. Our universal CA will be universal in the strong sense that Reach is \(\varSigma _1^0\)-complete. Note that in a transitive system the problem Reach is trivial, so a Devaney-chaotic CA can be universal only in the weaker sense given by Trace.
2.3 Reversible Turing Machines
A Turing machine (TM) is a triplet \(M=(Q,A,T)\) where \(Q\) is a finite set of states, \(A\) is a finite tape alphabet, and
is a set of instructions. Elements of \(Q\times \{-1,+1\}\times Q\) and \(Q\times A\times Q\times A\) are called move instructions and write instructions, respectively. A configuration of \(M\) is a triplet \((q,i,t)\in Q\times \mathbb {Z}\times A^\mathbb {Z}\) where \(q\) is the current state, \(i\) is the position of the machine on the tape, and \(t\) is the content of the tape.
-
A move instruction \((q,\delta ,q')\in T\) from state \(q\) to state \(q'\) allows the machine to convert configuration \((q,i,t)\) into \((q',i+\delta ,t)\), for all \(i\in \mathbb {Z}\) and all \(t\in A^\mathbb {Z}\).
-
A write instruction \((q,a,q',a')\in T\) from \(q\) to \(q'\) allows to change any \((q,i,t)\) into \((q',i,t')\), provided \(t(i)=a\), \(t'(i)=a'\) and \(t(j)=t'(j)\) for all \(j\ne i\).
A single step transformation of a configuration \(c\) into \(c'\) is denoted by \(c\vdash c'\). As usual, \(\vdash ^*\) is the reflexive and transitive closure of the relation \(\vdash \).
The Turing machine is deterministic if for each configuration there is at most one instruction applicable, so that \(\vdash \) is a partial function. This property has an easy to check characterization in terms of the instruction set \(T\):

Each instruction has an inverse, defined as follows:
-
The inverse of a move instruction \((q,\delta ,q')\) is \((q',-\delta , q)\), where we use the notation \(-(-1)=+1\) and \(-(+1)=-1\).
-
The inverse of a write instruction \((q,a,q',a')\) is \((q',a',q,a)\).
It is clear that the inverse always undoes the effect of the forward instruction, and vice versa. We denote by \(T^{-1}\) the set of inverses of instructions in \(T\), and the TM \(M^{-1}=(Q,A,T^{-1})\) is the inverse TM of \(M=(Q,A,T)\). If \(M^{-1}\) is deterministic then \(M\) is reversible. In this work we only use deterministic and reversible Turing machines (DRTM).
Deterministic reversible Turing machines are known to be able to simulate arbitrary Turing machines [2]. A construction of a single tape universal DRTM \(M=(Q,A,T)\) is given in [8]. This machine has specified initial and final states \(i,f\in Q\) and a blank tape symbol \(B\in A\), and there are no instructions in \(T\) into state \(i\) or from state \(f\). To each word \(w\in (A\setminus \{B\})^*\) that does not contain the symbol \(B\) we associate the initial tape content \(\iota _w= {}^\infty B\ \mathbf{.}\ wB^\infty \) where \(w\) is written on the otherwise blank tape starting at position \(0\). The universality result of [8] states that the standard halting problem of Turing machines

is \(\varSigma _1^0\)-complete.
In this work we consider universality in the sense of Delvenne et al., and for that purpose we need a DRTM universality variant where the tape content outside the input word \(w\) is not known to be initially blank, and where the final state appears in position 0 of the tape upon acceptance. So we associate to any Turing machine with specified initial state \(q_0\) and final state \(q_f\) the following decision problem that is an adaptation of Reach from Sect. 2.2:

Lemma 1
There exists a DRTM \(U\) with specified initial and final states such that TMreach is \(\varSigma _1^0\)-complete. There is no instruction in \(U\) into the initial state \(q_0\).

A deterministic, reversible Turing machine with \(\varSigma _1^0\)-complete decision problem TMreach.
Proof
Let \(M=(Q,A,T)\) be the universal DRTM from [8] with initial and final states \(i\) and \(f\), and a blank tape symbol \(B\). So there are no instructions in \(T\) into state \(i\) or from \(f\), and TMhalt is \(\varSigma _1^0\)-complete. Moreover, we may assume that \(M\) is forced to execute a write instruction at odd time steps. This is established by splitting each state \(q\in Q\) into two states \(q^{(1)}\) and \(q^{(2)}\), replacing any original instruction from state \(q\) into state \(p\) by an analogous instruction from state \(q^{(2)}\) into state \(p^{(1)}\), and by adding for all \(q\in Q\) and all \(a\in A\) the tape check instruction \((q^{(1)},a,q^{(2)},a)\).
We next construct a DRTM \(U\) with \(\varSigma _1^0\)-complete TMreach. The new state set consists of \(Q\) and 18 additional states. The tape alphabet is \(A\cup A'\cup \{[,]\}\) where \(A'=\{a'\ |\ a\in A\}\) is a disjoint copy of alphabet \(A\). All instructions in \(T\) are also instructions of \(U\) and, in addition, there are several instructions to be executed before and after simulating \(M\). The instructions are shown in Fig. 1. In the figure, vertices represent states and edges are instructions. A move instruction \((q,\delta ,q')\) is represented by a directed edge from \(q\) to \(q'\) with label \(L\) or \(R\), corresponding to cases \(\delta =-1\) and \(\delta =+1\), respectively. A write instruction \((q,a,q',a')\) is given as a directed edge from \(q\) to \(q'\) with label \(a/a'\). The subgraph corresponding to instructions of \(M\) is indicated as an oval with label \(M\). It is straightforward to verify that the given TM is deterministic and reversible. Note how the marked versions \(a'\) of letters \(a\in A\) are needed to guarantee reversibility.
Considering the first 14 states, it is easy to see that state \(i\) will be reached from initial configuration \((q_0,0,t)\) if and only if the content \(t\) of the tape is
for some \(w\in (A\setminus \{B\})^*\), some \(n,m\ge 0\), and arbitrary left- and right-infinite words \(x\) and \(y\). In this case, when entering state \(i\) the machine is in position \(1\) of the tape (hence reading the first letter of \(w\)) and the tape content is \(t\) as in the beginning.
From state \(i\) only instructions of \(M\) can be executed until (if ever) state \(f\) is reached. Note that \(M\) automatically stops if it accesses a boundary symbol \([\) or \(]\). This is due to the property of \(M\) that it executes a write instruction at odd time steps and hence can only continue on cells that contain an element of \(A\). It is then clear that state \(f\) is reached if and only if \(M\) reaches state \(f\) on input \(\iota _w\), and \(n\) and \(m\) are sufficiently large so that the accepting computation by \(M\) fits between the boundary symbols.
Last four states of \(U\) guarantee that the final state \(q_f\) will be seen in every tape position between the boundary symbols, and in particular then, in position \(0\) as required. (Note that this last part is not actually necessary since the DRTM \(M\) constructed in [8] has the property that the Turing machine halts at cell 0.)
It is clear that the problem TMhalt for \(M\) many-one reduces to the problem TMreach for \(U\): instance \(w\in (A\setminus \{B\})^*\) of TMhalt for \(M\) is equivalent to instance \(BwB\) of TMreach for \(U\). \(\Box \)
3 The Construction
In this section we present a construction of a reversible cellular automaton that is universal in the sense that problem Reach is \(\varSigma _1^0\)-complete, but the automaton and all its subsystems are non-sensitive. The cellular automaton has two tracks. Track One is independent of Track Two and will be described first. This track prevents sensitivity. Track Two simulates a reversible Turing machine as directed by the activation signals it sees on Track One.
3.1 Track One
This track is a radius-3 reversible cellular automaton with four states

. States

and

are the left and right aether symbols, while

and

are left and right signals that under normal circumstances (when surrounded by left and right aether on the left and right, respectively) proceed one position per time step to the direction of the arrow. All two-letter words except

are walls. Walls remain stationary: a cell that is part of a wall never changes its state, and therefore also remains part of the wall forever. A radius-3 local rule allows a cell to determine all wall cells within distance 2. Segments between walls are of four possible forms

where, as usual, \(^*\) indicates an arbitrarily long repetition.
The dynamics of an arrow that is not part of a wall is as follows.
-
If the arrow is next to a wall then it stays put:

Here, and in the following,

indicates a cell that belongs to a wall.
-
Otherwise, if there is a wall at distance two in front of the arrow then the arrow flips its direction:

-
Otherwise (i.e., the two cells in front of the arrow and the first cell behind it are not wall cells) the arrow moves one position:





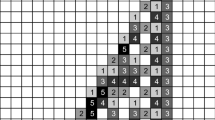
Figure 2 shows a sample space-time diagram of Track One. It is easy to see that the CA is reversible. Walls are never created or destroyed. All configurations are made of segments separated by walls. Each segment is either unchanged forever, or contains a single arrow that bounces between the walls.

A sample space-time diagram of Track One. Time increases down. From the second time step onward, symbol

3.2 Track Two
Track Two simulates the universal DRTM \(U\) provided by Lemma 1. The standard technique of identifying a computation zone using left and right markers is used to prevent several TM heads interfering with each other. Whenever the TM head bumps into the end of its zone (or sees a wall on Track One), the simulation is reversed and the machine starts retracing its computation backwards in time. The construction is similar to the one used in the proof of Theorem 12 in [5]. A new aspect is that the TM makes a step only when passed over by an active signal on Track One.
More precisely, let \(U=(Q,A,T)\) be a DRTM with initial and final states \(q_0\) and \(q_f\) whose TMreach-problem is \(\varSigma _1^0\)-complete. There is no instruction in \(T\) into state \(q_0\).
Track Two uses a radius-3 local rule. The state set is \(S_2=L\cup C\cup R\) where
A state \((a,q,\downarrow )\in C\) represents a TM tape cell that contains symbol \(a\) and is scanned by the TM in state \(q\) running forward in time, while \((a,q,\uparrow )\in C\) is the same situation except that the TM is running backward in time. States \((a,\rightarrow )\in L\) and \((a,\leftarrow )\in R\) are tape positions with symbol \(a\) that are to the left and to the right of the TM head, respectively. (So the arrow points to the direction where the TM head is to be found.)
We define walls on Track Two analogously to Track One. All length two words except ones that belong to \(LL\), \(LC\), \(CR\) or \(RR\) are walls on Track Two. We consider walls of both tracks, so a cell is a wall cell if it is part of a wall on either track. Any cell that is part of a wall does not change its Track Two content in any way, so it remains in the wall forever. It is clear that a cell can determine locally (within radius-1) if it is part of a wall. Analogously to Track One, segments on Track Two between consecutive walls contain words of the languages \(L^*, R^*\) and \(L^*CR^*\).
Cell \(i\) contains an active TM head if
-
1
it has a signal

or

on Track One,
-
2
It has a TM head on Track Two (i.e., belongs to \(C\)), and
-
3
there is no wall within radius-1 of the cell on either track.


An active TM head swaps its Track Two state from \((a,q,\downarrow )\) to \((a,q,\uparrow )\) in the following cases:
-
There is no instruction \((q,\delta ,q')\) or \((q,a,q',a')\) in \(T\) that \(U\) could execute, or
-
There is in \(T\) a move instruction \((q,\delta ,q')\) but the new position \(i+\delta \) is next to a wall (on either track), where \(i\) is the current position of the active TM head.
Analogously, state \((a,q,\uparrow )\) becomes \((a,q,\downarrow )\) in symmetric cases using the inverse instruction set \(T^{-1}\) in place of \(T\). In other words, the machine simply reverses time if there is no applicable instruction or if the machine would move to a position next to a wall.
Otherwise, an active TM head executes on Track Two the unique applicable instruction in \(T\) or \(T^{-1}\), in the cases of state \((a,q,\downarrow )\) or \((a,q,\uparrow )\), respectively. Note that in the case of a move instruction this involves updating the neighboring cell also. In no other cases is Track Two state changed.
Note that the TM head “bounces” from walls in an analogous manner as the signals on Track One: The head never moves next to a wall, and instead changes the direction of time and starts tracing its steps backwards. It is clear that this construction guarantees reversibility.
The two tracks together constitute the CA \(F\!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\) with state set \(S=S_1\times S_2\). We denote by \(\pi _1\!:S^\mathbb {Z}\longrightarrow S_1^\mathbb {Z}\) and \(\pi _2\!:S^\mathbb {Z}\longrightarrow S_2^\mathbb {Z}\) the projections of configurations on the tracks. Based on the discussions above, the CA \(F\) has the following properties:
-
\(F\) is reversible and has radius-3 local rule,
-
Track One operates independently of Track Two, that is, there is a CA \(F_1\!:S_1^\mathbb {Z}\longrightarrow S_1^\mathbb {Z}\) such that \(\pi _1\circ F=F_1\circ \pi _1\),
-
Track Two is changed only at positions having an activation signal within radius-1 on Track One.
4 Main Properties of the CA
In this section we show that the reversible CA constructed in Sect. 3 has the required properties.
Theorem 1
The reversible CA \(F\!:S^\mathbb {Z}\longrightarrow S^\mathbb {Z}\)
-
(a)
is universal in the sense that the decision problem Reach is \(\varSigma _1^0\)-complete, and
-
(b)
has no sensitive subsystems.
The proofs of (a) and (b) are presented in Sects. 4.1–4.2.
4.1 Universality
We prove that Reach is \(\varSigma _1^0\)-complete for CA \(F\) by many-one reducing TMreach for TM \(U\). Let \(w=a_0a_1\dots a_{n-1}\) be an arbitrary instance of TMreach for \(U\). An equivalent instance of Reach for \(F\) is the pair
of effectively formed clopen sets \(C_1,C_2\subseteq S^\mathbb {Z}\).
(\(\Longrightarrow \)) If \(w\) is a positive instance of TMreach then there exist \(t,t'\in A^\mathbb {Z}\) such that \(t_{[0,n-1]}=w\) and \((q_0,0,t)\vdash ^* (q_f,0,t')\) by \(U\). Machine \(U\) can read only a finite number of tape positions before reaching the accepting configuration so for some \(m\in \mathbb {N}\), all intermediate configurations \((q,i,t'')\) have \(|i|<m\). Consider the configuration \(x\in S^\mathbb {Z}\) with

where all

are, for example, equal to

to cause walls on Track One. We have \(x\in C_1\). From initial configuration \(x\), the CA has the following behavior: on Track One a single signal bounces between positions \(-(m-1)\) and \(m-1\). Each time the signal crosses the TM head on Track Two, one step of \(U\) is simulated. This happens repeatedly as long as the TM head remains in the interval \([-(m-1),m-1]\). We then eventually have \(F^i(x)\in C_2\), so the instance \(C_1,C_2\) is positive for Reach.
(\(\Longleftarrow \)) Conversely, suppose \(C_1, C_2\) is a positive instance of Reach for \(U\). There is then \(x\in C_1\) such that \(F^i(x)\in C_2\) for some \(i\in \mathbb {N}\). Let \(t\in A^\mathbb {Z}\) be the tape content expressed in \(x\), that is, \(\pi _2(x)_j = (t[j],\dots )\) for all \(j\). The only way to change the Track Two state \((t[0],q_0,\downarrow )\) into some \((a,q_f,\downarrow )\) in cell 0 is by repeatedly simulating \(U\) on Track Two. Note that the simulation cannot change the time direction before reaching state \(q_f\), since otherwise \(U^{-1}\) would be simulated, retracing the computation back to the initial state \(q_0\). As there are no instructions in \(U^{-1}\) from state \(q_0\), the time direction would be swapped again, leading to a periodic behavior that never leads to state \(q_f\). We conclude that \((q_0,0,t)\vdash ^* (q_f,0,t')\) by \(U\). As \(t_{[0,|w|-1]}=w\), word \(w\) is a positive instance of TMreach.
4.2 Sensitive Subsystems Do Not Exist
Let us prove next that CA \(F\) has no sensitive subsystems. Recall that a subsystem is any topologically closed \(X\subseteq S^\mathbb {Z}\) that satisfies \(F(X)\subseteq X\). Note that we do not require the subsystem to be a subshift, as it does not need to be shift-invariant. The proof is based on properties of Track One: the only fact about Track Two that we need is that the content of Track Two is only changed in the vicinity of a signal on Track One.
For the sake of argument, suppose there is a subsystem \(X\) on which \(F\) is sensitive to initial conditions. There is then a finite observation window \(W\) such that for any \(x\in X\) and any finite \(E\subseteq \mathbb {Z}\) there exists \(y\in X\) such that \(x_E=y_E\) but \(F^n(x)_W\ne F^n(y)_W\) for some \(n\ge 0\). Notice that this directly implies that
-
for all \(x\in X\), the first track \(\pi _1(x)\) does not have wall states both to the right and to the left of window \(W\).
This is because the walls are blocking words: future states between the walls are not influenced by any states outside the walls.
Let us consider the following two cases:
-
(1)
There is a finite window \(W\) such that all Track One walls of all \(x\in X\) are inside \(W\). We can choose this \(W\) to be also an observation window for the definition of sensitivity.
-
(2)
For arbitrarily large \(k\), there are \(x\in X\) with a Track One wall in some position \(i\) satisfying \(|i|>k\).
Case (1): Let \(x\in X\) have the maximum number of Track One arrows outside \(W\), among all \(x\in X\). This number is 0,1 or 2 since the segments outside \(W\) do not contain a wall. Let \(E=[a,b]\) be a finite segment that contains the radius-3 neighborhood of \(W\) and all the positions where \(x\) has arrows on Track One. (We include the radius-3 neighborhood because the local rule of \(F\) uses radius \(3\).) There are then uniform aethers in \(\pi _1(x)\) to the left and to the right of \(E\).
If \(y\in X\) and \(y_E=x_E\) then necessarily \(\pi _1(y)=\pi _1(x)\). Since Track One operates independently of the content of Track Two, for all \(n\ge 0\) we have \(\pi _1(F^n(y))=\pi _1(F^n(x))\). Both boundaries of \(E\) are crossed by a Track One signal at most once, and in such a case the signal moves out from \(E\). Consequently, only three cells on each boundary can be updated differently in \(x\) and \(y\), and it follows that \(F^n(y)_W=F^n(x)_W\) for all \(n\in \mathbb {N}\). This contradicts sensitivity (and means that \(x\) is an equicontinuity point).
Case (2): Let \(x\in X\) be such that \(\pi _1(x)\) has a wall in position \(i\) to the right of \(W\) but no wall in any position to the left of \(W\). (The other case is symmetric.) Note that property (\(\bullet \)) excludes the possibility of walls on both sides of \(W\). As in case (1) we assume that \(x\) has the maximal number of Track One arrows to the left of \(W\). Let \(E=[a,b]\) be a finite segment that contains the radius-3 neighborhood of the sensitivity window \(W\), position \(i\) and the possible position left of \(W\) where \(x\) has an arrow on Track One. If \(y\in X\) satisfies \(y_E=x_E\) then \(\pi _1(y)\) cannot contain a wall in any position \(<a\) by property (\(\bullet \)). We then have that \(\pi _1(y)\) and \(\pi _1(x)\) are identical at all cells \(\le b\). As there is a wall in cell \(i\), we clearly have also for all \(n\in \mathbb {N}\) that \(\pi _1(F^n(y))_{(-\infty ,i]}=\pi _1(F^n(x))_{(-\infty ,i]}\). As in case (1), a signal crosses the left boundary of \(E\) at most once (moving out of \(E\)), so at most three leftmost cells of \(E\) can be affected by the states to the left of \(E\). The wall at position \(i\) prevents any influence on \(W\) by states on the right of \(E\). We see that \(F^n(y)_W=F^n(x)_W\) for all \(n\in \mathbb {N}\). \(\Box \)
References
Banks, J., Brooks, J., Cairns, G., Davis, G., Stacey, P.: On devaney’s definition of chaos. Am. Math. Mon. 99(4), 332–334 (1992)
Bennett, C.H.: Logical reversibility of computation. IBM J. Res. Dev. 17(6), 525–532 (1973)
Delvenne, J.C., Kurka, P., Blondel, V.D.: Decidability and universality in symbolic dynamical systems. Fundam. Inform. 74(4), 463–490 (2006)
Devaney, R.: An introduction to chaotic dynamical systems. Global analysis, pure and applied, Benjamin/Cummings (1986)
Kari, J., Ollinger, N.: Periodicity and immortality in reversible computing. In: Ochmański, E., Tyszkiewicz, J. (eds.) MFCS 2008. LNCS, vol. 5162, pp. 419–430. Springer, Heidelberg (2008)
Kari, J., Salo, V., Törmä, I.: Trace complexity of chaotic reversible cellular automata. In: Yamashita, S., Minato, S. (eds.) RC 2014. LNCS, vol. 8507, pp. 54–66. Springer, Heidelberg (2014)
Langton, C.G.: Computation at the edge of chaos: Phase transitions and emergent computation. Phys. D 42(1–3), 12–37 (1990)
Morita, K., Shirasaki, A., Gono, Y.: A 1-tape 2-symbol reversible turing machine. Trans. IEICE Japan E72, 223–228 (1989)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Kari, J. (2015). A Universal Cellular Automaton Without Sensitive Subsystems. In: Isokawa, T., Imai, K., Matsui, N., Peper, F., Umeo, H. (eds) Cellular Automata and Discrete Complex Systems. AUTOMATA 2014. Lecture Notes in Computer Science(), vol 8996. Springer, Cham. https://doi.org/10.1007/978-3-319-18812-6_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-18812-6_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-18811-9
Online ISBN: 978-3-319-18812-6
eBook Packages: Computer ScienceComputer Science (R0)