
Abstract
Traffic puts a high burden on the environment in means of emitted pollutants and consumed fuel. Different attempts exist for reducing these impacts, ranging from traffic management actions to in-vehicle ITS solutions. When equipped with a model of vehicular pollutant emissions, microscopic traffic simulations are assumed to be helpful in predicting the performance of such approaches. SUMO includes a model for vehicular emissions since 2008. In the context of the projects COLOMBO and AMITRAN, two further models were implemented. Herein, these models are presented and discussed, pointing out the progress in emissions modelling.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Air pollution is a well-known problem that ranges from local air quality issues up to global effects the humanity is confronted with, such as global warming. Following the International Transport Forum [1], “[the] Transport-sector CO2 emissions represent 23 % (globally) and 30 % (OECD) of overall CO2 emissions from Fossil fuel combustion. The sector accounts for approximately 15 % of overall greenhouse gas emissions.”
Different actors are involved in reducing road traffic’s environmental impact and its resource consumption, often forced to do so by law. In Europe, automobile manufacturers shall reduce their fleet emissions [2]. Cities try to keep the amounts of pollutant concentrations below the thresholds formulated in according regulations, such as [3]. Finally, pollutant emission is correlated to the consumption of fuel. As fuel price has increased in the past years, the reduction of emissions is also in the focus of end users—individuals as well as (e.g. logistics) companies. This large variety of actors and customers yields in an accordingly large amount of solutions. They range from large-scale traffic management actions, such as the introduction of environmental zones, down to in-vehicle solutions that propose the driver a speed that minimizes emissions.
The development of technical solutions for critical systems usually includes a step where the solution is modelled as software and simulated. This step allows validating the assumptions about the solution’s functionality and to benchmark or prove its performance a priori. In the context of evaluating on-road solutions, traffic simulations are an established tool used for this purpose by both, consultants and researchers. Academic approaches, such as the traffic simulation SUMO [4, 5] that is discussed herein, attempt to simulate large, city-wide areas using so-called microscopic models that simulate every traffic participant individually.
To evaluate a solution that was designed to reduce road traffic’s impact on air quality the used traffic simulation must be capable to compute the amount of the emitted pollutants the solution attempts to reduce. A large variety of emission models is described in the scientific literature. They differ in the required input parameters, the covered pollutants, the coverage of the real-world emission fleet, and the aggregation of the results in time and area. Therefore, according requirements must be formulated before choosing a model that shall be embedded or implemented into the used traffic simulation.
In the following, recent work on vehicular emissions modelling in SUMO will be presented. This work has been performed within the projects “COLOMBO” [6, 7] and “AMITRAN” [8, 9]. The models implemented within these projects are going to replace SUMO’s initial emissions model that was developed within the project “iTETRIS” [10, 11]. All three projects are, or respectively were, co-funded by the European Commission.
The remainder is structured as follows. A discussion of SUMO’s requirements to an emission model is given, first, followed by an overview about emissions modelling and available emission models. A description of the emission models implemented into SUMO is given afterwards. Then, using and extending the emission models embedded in SUMO is described. Some use cases are presented afterwards. The report ends with a summary.
2 SUMO’s Requirements to an Emission Model
Briefly said, the emission model to choose should be capable to be used as a source of further measurements for the applications the traffic simulation is usually used for. In other words, it should not change the way the traffic simulation is used. Instead, it should generate additional information, not available before. As SUMO’s goal is to simulate real-world traffic in large areas, the model should cover the complete emission fleet found on roads nowadays. This counts for passenger vehicles as well as for heavy duty vehicles, busses, motorcycles, etc. One should also take into regard that the deployment of currently developed ITS applications will be realized in the future. Therefore, the model should be capable to represent future fleet compositions. Some types of investigations require a distinction of regulative emission classes, e.g. the Euro norm. Such a classification also helps in representing the population of vehicles over time, as most statistics on past and current vehicle fleets are represented this way. Of course, a clear distinction between passenger vehicles, heavy duty vehicles, and busses is necessary, because some regulations affect only vehicles of one of these classes, mainly the heavy duty vehicles.
A second top-level requirement is that the emission model should match the resolution of the traffic simulation. It should be sensible to all vehicle (or traffic) state attributes the simulation offers. In the case of a microscopic simulation, a vehicle’s acceleration, speed, and the slope of the road beneath the vehicle are the major attributes to consider. On the contrary, the model is wanted to use only those vehicle parameters that are offered by the traffic simulation model. Such a close connection to the traffic model implies the possibility to compute emission values for each simulated time step, usually having a length of one second or below. To achieve this, the emissions model must compute emissions at the same time scale.
Not all available models cover all pollutants emitted by road traffic. As well, not all gases emitted by road traffic are relevant. Therefore the pollutants assumed to be needed should be a part of the requirements. Within the iTETRIS project (see [12]), it was decided to model the emission of CO, CO2, NOx, PMx, and HC, because these emissions are toxic (CO), cause cancer (PMx), are responsible for ground-level ozone increase and smog generation (NOx and HC) or are greenhouse gases (CO2). Additionally, the fuel consumption should have been modelled.
An emission model for SUMO has to fulfil some other, non-functional requirements. It should be portable matching SUMO’s overall portability. It should be fast in execution for being applicable to large-scale scenarios. And it should be directly embedded into the simulation to avoid additional interaction between programs (e.g. socket-based) or file exchange.
SUMO’s viral GPL license requires the implementation of the model under the same license. And, of course, the model should be easily usable. Summarizing, the following requirements are put on a model:
-
Cover the complete vehicle fleet (in means of emission classes);
-
Offer a classification of classes into Euro-norms;
-
Compute certain pollutants (CO, CO2, NOx, PMx, HC, and fuel consumption were chosen);
-
(Be) sensible to microscopic parameters available in the simulation;
-
Require only information that is available in the simulation;
-
(Be) able to compute emissions in simulated time steps;
-
(Be) easy to parameterize;
-
(Be) portable, fast in execution, and directly embedded into the simulation;
-
(Be) licensed under a GPL-compatible license.
3 Emission Models Overview
Most of nowadays vehicles burn petroleum-derived fuel for propulsion. When regarding small time scales, fuel consumption depends on the vehicle’s engine characteristics and on the current load of the engine. The load is dictated by the force a vehicle needs to overcome as well as by the chosen gear (see [13] for a very good explanation). Most of the fuel burns to the greenhouse gas CO2 and to water. But other, often toxic gases are generated as well. Catalytic converters convert a major portion of some of these pollutants into non-toxic gases. The performance of the catalytic converter mainly depends on the catalyst’s temperature as well as on the engine’s current operating point. The amount of emitted pollutants depends on other influences, such as drive train losses, the road’s slope, or the air-fuel ratio at combustion. Additionally, long-term effects of a driving style may change a vehicle’s emission behavior.
In summary, every single vehicle has an individual emission behavior. But when investigating road traffic, many vehicles of different type have to be regarded. It is thereby necessary to find a tradeoff between the amount of vehicle emission classes a model covers and the details in modelling each single vehicle or single emission class. The literature accordingly distinguishes the following classes of emission models:
-
“inventory” emission models that include data for the major portion of the vehicle emission classes; their input usually consists of a vehicle population composition and the amount of driven distances, optionally also the average speed or an abstract traffic state. Such models usually cover a large set of different pollutants.
-
“instantaneous” (or “modal”) emission models that simulate a single vehicle’s emission, where [14] proposes a further distinction into emission maps, regression-based models, and load-based models. Trying to model the emissions for a single vehicle as exact as possible, these models usually regard a small number of vehicles only.
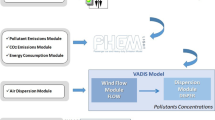
It follows that the models differ in granularity and input parameters they need as well as in the number of covered pollutants. One should note that some “instantaneous” models exist which databases were incrementally extended over the years to cover a large portion of real-world’s vehicle emission classes. The model PHEM (“Passenger and Heavy Vehicles Emission Model”) [15, 16], which derivate was included in SUMO as shown in Sect. 4.2, is one of such models. Its sub-modules and their inter-dependencies are shown in Fig. 1.

Schematic representation of the PHEM emission model [17]
Within the iTETRIS project, 15 non-commercial (freely available in means of data or a document that completely defines them) emission models have been examined to determine candidates for being embedded into SUMO. Commercial models have not been included in this investigation. None of the 15 models fulfilled the posed requirements directly. The inventory models were found to be too coarse due to being insensitive to the vehicle’s acceleration. But most instantaneous models compute only few of the required pollutants. Additionally, the needed input parameters were often not completely given. As well, most instantaneous models use parameter that are not originally covered by SUMO’s simulation model and would introduce a high number of additional parameters into SUMO’s vehicle type description.
As a conclusion, none of the evaluated models could be directly embedded into SUMO. Instead, one of the inventory models was chosen and reformulated to be continuous in speed and acceleration, as described in the following chapter.
4 Implemented Emission Models
As no emission model could be found that on the one hand is instantaneous in means of regarding vehicle attributes used in a microscopic simulation but on the other hand still covers a major part of the vehicle population, the decision to build an own model based on data from the HBEFA [18] database was taken. HBEFA, in version 2.1 at that time, was one of the investigated inventory models. This initial implementation of an emission model into SUMO will be described in the following section. Two recently developed emission models will be presented afterwards: “PHEMlight”, which is derived from PHEM and a new approach to reformulate the emissions stored in the inventory database HBEFA, using its version 3.1. The models have been implemented in the projects “COLOMBO” and “AMITRAN”, respectively.
4.1 Initial HBEFA V2.1 Derivation
The model was implemented by extracting the data from HBEFA and fitting them to a continuous function that was obtained by simplifying the function of the power the vehicle engine must produce to overcome the driving resistance force (see [13, 19]). The simplified function for accordingly computing the energy consumption rate e is thereby [12]:
This function has been used for all pollutants, only the coefficients change per emission class and pollutant. HBEFA’s lack of a dependency on acceleration was compensated by using the contained information about the dependency of the emissions on the road slope. But it should be noted that only the values up to ±0.6 m/s2 can be determined this way, the dependency on higher acceleration/deceleration was obtained by extrapolating the given values. The used version 2.1 of HBEFA lacked data for rare vehicle classes (e.g. Euro-Norm-6 vehicles at that time). Both low as well as high velocities, the latter mainly for heavy duty vehicles, were missing for some emission classes as well. As a result, the obtained curves did not match some basic emission properties, such as being always above zero or producing emissions at a velocity of 0 m/s. To avoid major misbehavior, emission classes that were recognized to be badly represented by the fitted function were removed.
The so obtained curves for the remaining vehicle classes were clustered into groups of similar behavior. The initial idea for performing this step was to reduce the number of emission classes to ease the definition of a simulation scenario. In Fig. 2, the development of the residual sum of squares (RSS) in dependence to the cluster number is given individually for passenger (left) and heavy duty (right) vehicles. As shown, no clear thresholds in the development were found that motivate to select a certain cluster size. Therefore, the decision to define more than one cluster per passenger/heavy duty emission classes was taken. Resulting, passenger vehicles can be chosen from three sets that include 3, 6, and 12 emission classes, respectively. Clusters with 7 and 14 emission types can be used for modelling heavy duty vehicles.

The development of the error for an increasing amount of clusters. Chosen clusters are shown in black
While working with the obtained model, several issues were found, partially grounded in the decisions taken during the development. The simplification attempted by clustering emission classes was found to be not beneficial. E.g., the lack of an explicitly given Euro norm does not allow to perform investigations of regulatory actions such as environmental zones that distinguish between emission classes. Additionally, the lack of a projection from the clusters back to the original emission classes makes setting up a realistic emission population complicated.
These issues were regarded during the implementation of the new HBEFA-based emission model described in Sect. 4.3. Further information about the development of this first emission model in SUMO can be found in [12].
4.2 PHEMlight
PHEMlight is an instantaneous emission model based on PHEM. It has been designed and implemented within the COLOMBO project by the Technical University of Graz, the originator of PHEM. PHEM itself provides basic emission factors for HBEFA 3 and COPERT and thus can be regarded as a de facto European reference.
The amount of emissions produced by a vehicle (as well as the amount of consumed fuel) during a simulation step are determined by computing the power needed by the vehicle, first. The overall power is computed as:
where
with:
- η gearbox :
-
driver train loss (set to 0.95)
- m vehicle , m load :
-
masses of the vehicle and its load, respectively
- g :
-
Gravitational constant (6.673 × 10−11 m3/(kg × s2))
- Fr 0 , Fr 1 , Fr 2 :
-
friction coefficients
- v :
-
the current vehicle velocity
- c d :
-
vehicle’s drag coefficient
- A :
-
cross-sectional area (m2)
- ρ :
-
air density (~1.225 kg/m3)
- m rot :
-
rotational mass
PHEMlight uses so-called “Characteristic Emission curves over Power” (CEPs) which define the emission amount (g/h) as function of the current engine power of the vehicle. These curves were computed using PHEM with representative dynamic real world driving cycles. To compute the amount of an emitted pollutant, the CEPs are used as look-up tables for the previously computed power.
PHEMlight defines 112 vehicle emission classes. The major distinction is on the level of “vehicle classes”. The following ones are modeled by PHEMlight: Passenger cars (PKW), Light duty vehicles (LNF), Motorcycles (MR), Scooters (KKR), Hybrid passenger cars (H_PKW), Tractor/Trailer (LSZ), Coaches (RB), Urban and inter-urban buses (LB), and Trucks (Solo_LKW). Each of those top-level classes is subdivided if appropriate, based on the type of fuel (Gasoline vs. Diesel) and the Euro norm (0–6). Light duty vehicles and Trucks are additionally subdivided by their weight.
PHEMlight is available as a commercial add-on to SUMO. The implementation itself is included in the usual, open SUMO version. But the major information is stored in CEP and vehicle attribute files. This data is included in SUMO’s open source release for only two emission classes: a Euro-4 passenger car with a gasoline engine and a passenger car with the same emission class, but running on Diesel. The remaining emission class definitions have to be purchased from the Technical University of Graz. A more complete description of PHEMlight can be found in [17].
4.3 HBEFA v3.1 Derivation
Given the lessons learned while implementing and using the initial HBEFA v2.1-based emission model and the availability of a new HBEFA version that includes data on modern Euro-Norm-6 vehicles, a new attempt to build a free emission model was done in the scope of the AMITRAN project.
The applied procedure is similar to the one used for the initial HBEFA derivation: values included in HBEFA are extracted for each emission class and function (1) is fitted against them. Again, the slope information given in HBEFA is used to take the part of the missing dependency on acceleration. The restrictions concerning available acceleration values therefore remain as in the initial implementation.
Fitting the values to the given function is a linear problem, since only the linear coefficients c0–c5 need to be evaluated. The fitting was performed using a linear model estimation algorithm from Python’s “statsmodels” package. Since a linear fit usually does not lead to a clear answer whether a coefficient is zero or not, a couple of slightly different models were tested in each case (one emission class and one vehicle class) where some of the coefficients of (1) were set to zero and not estimated in the according fit. By comparing these candidate functions, the best one (based on RMS and t-value) was used as the final result, i.e. a set of fitting parameters for this case at hand. This works quite well in most of the cases, the remaining challenges are that not all emissions seem to be well represented by function (1).
In principle, emission curves could be fit to all emission classes included in HBEFA’s version 3.1 resulting in some hundreds of different coefficient sets. But to keep the model lean and to ease the preparation of a vehicle population, it has been decided to use the most common emission classes only. In its current implementation, the model includes 45 emission classes: light duty vehicles (LDV) and passenger cars (PC), both sub-divided by fuel type and Euro norm and heavy duty vehicles (HDV) sub-divided by Euro norm. Additionally, average classes for LDVs, PCs, Busses, Coaches, and HDV exist. Some special classes model the emission behavior of an Eastern LDV, an Eastern HDV, and an alternative PC. Further classes may be added on purpose, by fitting the desired emission data to function (1) and embedding the so obtained coefficients into SUMO. The model as well as all obtained coefficients are publicly available as a part of SUMO’s open source version.
4.4 Comparisons
In a first step, fulfilling the requirements formulated in Sect. 3 by the models is presented. It should be mentioned that all models compute the desired pollutants’ emissions (CO, CO2, NOx, PMx, HC, and fuel consumption). Table 1 shows a summary of other named requirements.
The number of respectively covered emission classes requires some explanations, given in the following:
-
The initial model derived from HBEFA v2.1 duplicates all vehicle classes where the second set ignores the current acceleration. These acceleration-free models were used within the investigations on emission-optimal routing (see Sect. 6.2).
-
As discussed in Sect. 4.1, the HBEFA v2.1-derivation does not include 56 distinct emission classes but rather 56 clusters of similar emission classes.
-
As mentioned in Sect. 4.3, the number of emission classes in the HBEFA 3.1-based model could be increased when necessary.
In order to verify the emission output of PHEMlight, calculations using the ERMES real world driving cycle were performed with PHEM and PHEMlight using the average EURO 4 Diesel passenger car. Figures 3, 4 and 5 show fuel consumption, NOx and PM results for each model.

Fuel consumption comparison between PHEM and PHEMlight

NOx comparison between PHEM and PHEMlight

PM comparison between PHEM and PHEMlight
The results present very good correlation between the two models over the whole cycle despite the fact that PHEMlight uses a significantly simpler approach with no consideration of gear shifting and engine speed. Table 2 shows the average emission results for the same components.
The deviation is to a high extent caused by the fact that PHEMlight calculates no emissions (i.e. 0 g/h) when the engine is in motoring operation. In PHEM the motoring emissions are based on measurements on the chassis dynamometer where, due to technical limitations, the measured emission level is not entirely cut off at the same moment as the engine stops injecting fuel. For PHEMlight it was decided to implement fuel cut off explicitly to depict the influence of optimized deceleration behavior on emission levels correctly.
In a further approach to compare the models, the New European Driving Cycle was applied to all comparable emission classes of the HBEFA3 and the PHEMlight model. This includes Diesel and Gasoline powered vehicles of the seven currently available Euro norms (0–6).
There is one point in the scatter plot for each emission class. Down-facing triangles describe Diesel fueled light duty vehicles (LDV), up-facing the Diesel (D) passenger cars, circles are Gasoline (G) fueled LDVs and squares Gasoline passenger cars. The brightness encodes the Euro norm. For better orientation, the diagonal line representing identical values has been drawn into the figure as well. For light duty vehicles there are up to three points for each emission class on the plot because every HBEFA3 class is subdivided by vehicle weight in up to three PHEMlight classes (Fig. 6).

Fuel consumption comparison for comparable classes between HBEFA3 and PHEMlight
While in general the values are close (please note that the axes do not start at zero), HBEFA seems to give higher fuel consumption values especially for the older gasoline-powered passenger cars. The values for Diesel engines are almost identical.
5 Working with SUMO’s Emission Models
Besides realizing an emission model, the work on vehicular emissions included a large variety of actions that target topics such as the implementation of proper visualisation of the generated emissions data, support to handle emissions by other tools in the suite than the simulation only, as well as opening the applications to the inclusion of further emission models. In the following subsections, the implemented features are described. Additionally, a summary on open issues in modelling emissions is given.
5.1 Simulation
The implementation tries to give the user the highest grade of flexibility by allowing him to compose the vehicle fleet using the implemented emission classes. In SUMO, so-called “vehicle types” may be defined that may be shared by an arbitrary number of vehicles to simulate. These vehicle types describe the assigned vehicles’ physical and model attributes including their respective emission class. It is additionally possible to define so-called “vehicle type distributions”. A vehicle type distribution is composed of several vehicle types, each having a probability to be selected. If a vehicle lists such a distribution as its vehicle type, one of the included vehicle types is selected according to the given probability.
The simulation was extended by a large variety of outputs that collect and aggregate the computed emissions in different ways. The available outputs include:
-
aggregation of emissions per lane with variable interval time spans,
-
aggregation of emissions per edge with variable interval time spans,
-
aggregation of emissions for each simulated vehicle,
-
non-aggregated (step-wise) vehicle emissions,
-
a vehicular trajectory file as defined in AMITRAN.
The AMITRAN trajectory format is an intermediate data exchange format that may be converted into inputs for emission models such as VERSIT+, PHEM, and HBEFA. It is interchangeably usable among different traffic simulation ecosystems such as SUMO, VISSIM and TNO ITS Modeler. A similar approach was used to generate input files for the PHEM emission model: a converter script was set up that obtains an “fcd-output” as generated by SUMO and converts it to files that resemble the vehicle fleet, the road network, and the trajectories as read by PHEM.
In addition, SUMO’s on-line interaction interface “TraCI” has been extended by methods for retrieving the emissions a single vehicle “produced” in the last simulation step, as well as aggregated emissions produced on edges or lanes. The visualization allows coloring lanes and/or vehicles by the amount of pollutants emitted on them or generated by them, respectively.
Emission computation is performed as soon as the user (a) asks for an according output, (b) asks to visualize the emissions, and/or (c) asks for a vehicle’s current emissions via TraCI. All these interfaces are supported by all implemented emission models, cover all of the modelled pollutants, and—despite the visualization of emissions—are available in both, the command line and the graphical version of the simulation.
SUMO’s user documentation includes a description of the output functionalities and has been extended by a chapter on emissions modelling.
5.2 Router Support
Besides enabling the traffic simulation to compute pollutant emissions, the route computation applications included in the SUMO suite were extended as well. The wish was to perform route computation based on the amount of emitted pollutants instead of the conventionally used travel time. To achieve this purpose, the shortest-path router was extended to read time lines of vehicular emissions. The implementations of the shortest-path algorithms were reworked to use these values as edge weights and additionally keep track of the travel time to obtain these weights from the correct time slice of the loaded emissions time line. This extension has already been used for different purposes, as outlined in Sect. 6.2.
5.3 Tools
Several additional tools support the development and usage of emission models in SUMO context.
“emissionsDrivingCycle” takes trajectories consisting of speed, acceleration (optional), and slope (optional) for each time step of a virtually driven driving cycle for one or multiple vehicles and computes the according emissions. The obtained emission time lines can be visualized using additionally available scripts. The tool reads trajectories in the AMITRAN format mentioned above as well and can thus be employed to use SUMO’s emission models with trajectories from other simulation tools.
“emissionsMap” computes a matrix that contains the emission amounts of modeled pollutants in dependence to a driven speed, acceleration, and slope for a named emission class. An additional visualization script shows the so obtained matrices.
5.4 Embedding New Emission Models into SUMO
The co-existence of different emission models was realized by deriving a common “interface”. This interface is kept very simple. For each known pollutant, a method exists that returns its computed emission amount in mg/s (ml/s for fuel). The method obtains the vehicle’s emission class, its speed, acceleration, and the slope of the road it drives on. Internally, the emission class is encoded as a 32 bit integer. The upper 16 bits are used to encode the used model while the lower 15 bits define a single emission class within this model. Bit 15 (the 16th bit) denotes whether the regarded emission type is a heavy duty or a light (passenger) vehicle. This information is needed to compute the vehicles’ noise emissions using the embedded Harmonoise model [20]. When being asked to compute the amount of a pollutant’s emissions, the interface determines the model to use based on the upper 16 bits, first. It then asks the model implementation for computing the emission amount, passing all given values.
Besides giving access to the emission computation, the interface holds several further methods, mainly for computing parameters needed for file exchange between AMITRAN tools. As SUMO does not force emission models to fulfill a common view on emission classes, these methods derive information such as the fuel type, the Euro norm, or the type of the vehicle based on the information known to the emission model implementations only.
The interface offers a clean access to the implemented models, but it should be noted that currently only models that rely on the selected parameters—emission class, speed, acceleration, and slope—can be implemented. As soon as other parameters have to be taken into account, the interface would have to be extended.
5.5 Open Issues
The implemented models allow a large variety of investigations as shown in the next section. Nonetheless, some peculiarities of vehicular emissions are still neglected and may be addressed in next development steps.
The first to name are “cold start emissions”; vehicles produce more emissions as long as the engine and the catalytic converter are not at their optimal working temperature. For taking this effect into regard, the time the vehicle was driving before entering the simulated network has to be known. It should be stated that modelling this information for transit traffic—vehicles that do not start or end within the simulated network—is complicated.
The second peculiarity is the dependence on the vehicle mass. Both HBEFA-based models include this information implicitly. PHEMlight holds the average mass of vehicles of the respective emission class within the emission class definition files. Still, the mass is given as a constant value. But when fleet management, other logistics approaches or public transport shall be simulated, changes in the vehicles’ masses may be an important factor. In such cases, the vehicle mass would have to be moved into SUMO’s internal vehicle type definition.
The last simplification to name is the gear choice that has as well a major effect on produced emissions. Gear choice is not considered by usual car-following models and is as well not explicitly taken into regard by the emission models discussed before. Both parts would have to be extended to model gear choice properly.
6 Use Cases
Being available for several years, the emission models have been already used in a large variety of investigations of which some are outlined in the following.
6.1 Investigating Environment Impacts of ITS Solutions
The major application is surely to measure changes in produced emissions when investigating new methods that influence traffic. In such cases, the computed emissions are used as a further performance indicator besides the commonly used traffic efficiency measures, such as travel time or waiting times. Given SUMO’s output capabilities, such measurements can be easily obtained and were used in a large variety of evaluations.
As increasing traffic efficiency usually reduces pollutant emission, often no new insight can be gained from such evaluations. But it is interesting to note that in some cases, the deployment of a new ITS solution may increase the amounts of produced emissions. This was shown for a GLOSA (Green Light Optimal Speed Advisory) implementation [21] where, when assuming long communication ranges of more than 500 m, a vehicle may be advised to run at a low velocity (below 25 km/h) for a long time, yielding in emissions above the non-equipped situation. It was found that the used function to compute the speed to advice was the reason and other GLOSA algorithms are well capable to reduce emissions. Still, it shows that environmental performance indicators should be included when evaluating a new method or system.
6.2 Emission-Optimal Routing
Usually, route computation is performed using travel times as weights for the edges of a road network. But what if one would use the emitted pollutants instead? Would the overall emissions be reduced? First investigations on this topic were performed using a real-world network [22]. To gain a deeper understanding about the dynamics of the processes, later investigations [23] were performed using synthetic scenarios. At the time being, neither a singular user nor a singular system optimum is assumed to be computable using currently available methods. The main problem in this case is that for most emissions (in most emission classes) there is some kind of an optimal speed which violates the general assumption that the cost function on a single edge is monotone in the number of vehicles driving that edge.
6.3 Evaluation of Real Traffic Management Actions
The “Directive 2008/50/EC of the European Parliament and of the Council” [3] forces European authorities to assure a certain air quality. Traffic management, usually operated by local authorities, has the duty to perform corrective actions to reduce emissions caused by road traffic, if needed. A proof-of-concept for simulating such actions that used SUMO and the HBEFA 2.1-based model was presented in [24] where three speed limit changes were investigated—30 and 60 km/h for urban areas and 80 km/h for highways.
In his Master thesis [25], Tomàs Josep Vergés investigates the MARLIS [26] database that lists actions performed by traffic management authorities, first, to evaluate which of the actions can be simulated when using a microscopic traffic simulation only. The evaluation showed that most actions target at a change in the population’s mobility behavior, mainly for using a more environment-friendly transport mode. This can only be simulated using an according population model that was not available within his research. The following traffic management actions were selected and modeled within the thesis: (a) a reduction of the allowed velocity in inhabited areas to 30 km/h, (b) a restrictive environmental zone, and (c) a permissive environmental zone. These actions were modeled and a new user equilibrium was computed, first. The obtained vehicle routes were then simulated using PHEMlight.
As expected, in case of a speed limit, traffic moves out of the influenced areas, yielding in an according shift in pollutant emission. Additionally, speed limits were found to not reduce emissions, as already known from the literature. After the introduction of an environmental zone, the mobility patterns change in a more complex way as prohibited vehicles have to drive around it what makes the roads within the zone more attractive to be used by allowed vehicles. The resulting changes in road usage span over a bigger area. The results related to the speed limit were similar in both investigations, independent of the emission model.
7 Summary
Recent steps in modelling vehicular emissions within the open source traffic simulation SUMO were presented. Three emission models that are currently implemented in SUMO were discussed: issues regarding the initial model derived from HBEFA were recognized and named, and a recently implemented model that tries to solve them was described. In addition, the extension of SUMO by a commercial emission model, PHEMlight, was presented.
As shown, the inclusion of emission models in a microscopic road traffic simulation allows gaining insights about the effects of evaluated solutions on the environment. In most cases the induction “smoother traffic → less emissions” holds. But evaluating pollutant emission behavior may offer some surprises, as named for the GLOSA example in Sect. 6.1. Besides evaluating the environmental benefit of ITS solutions the models were successfully applied to the simulation of large-scale regulatory actions.
The presented extensions cover the work defined for the projects “COLOMBO” and “AMITRAN” well. Nonetheless, several possible extensions that may be targeted in the future were identified and listed. But given the currently implemented models, it is assumed that next steps towards a further quality improvement should be performed by reworking the simulation’s representation of single vehicles’ longitudinal behavior; it is known that nowadays car-following models do not replicate the decelerations and accelerations of vehicles well. These simulation model characteristics should be addressed next.
References
International Transport Forum (2010) Reducing transport greenhouse gas emissions: trends and data, OECD
European Parliament and the Council of the European Union, regulation (EC) no 443/2009 setting emission performance standards for new passenger cars as part of the community’s integrated approach to reduce CO2 emissions from light-duty vehicles, 2009
European Parliament and the Council of the European Union, directive 2008/50/EC on ambient air quality and cleaner air for Europe, 2008
Krajzewicz D, Erdmann J, Behrisch M, Bieker L (2012) Recent development and applications of SUMO—Simulation of Urban MObility. Int J Adv Syst Meas 5(3, 4):128–138. ISSN:1942-261x
DLR and Contributors (2013) SUMO homepage. http://sumo.dlr.de/
Krajzewicz D, Heinrich M, Milano M, Bellavista P, Stützle T, Härri J, Spyropoulos T, Blokpoel R, Hausberger S, Fellendorf M (2013) COLOMBO: investigating the potential of V2X for traffic management purposes assuming low penetration rates. In: ITS Europe 2013, Dublin
COLOMBO Consortium (2013) COLOMBO web pages. http://colombo-fp7.eu/. Accessed 10 April 2014
Jonkers E, Klunder G, Mahmod M, Benz T (2013) Methodology and framework architecture for the evaluation of effects of ICT measures on CO2 emissions. In: Proceedings of the 20th ITS world congress, Tokyo, Japan
AMITRAN Consortium (2013) AMITRAN web pages. http://www.amitran.eu/. Accessed 10 April 2014
Rondinone M, Maneros J, Krajzewicz D, Bauza R, Cataldi P, Hrizi F, Gozalvez J, Kumar V, Röckl M, Lin L, Lazaro O, Leguay J, Härri J, Vaz S, Lopez Y, Sepulcre M, Wetterwald M, Blokpoel R, Cartolano F (2013) ITETRIS: a modular simulation platform for the large scale evaluation of cooperative ITS applications. In: Simulation modelling practice and theory. Elsevier. doi:10.1016/j.simpat.2013.01.007. ISSN:1569-190X
iTETRIS Consortium (2011) iTETRIS web site. http://www.ict-itetris.eu/. Accessed 8 Jan 2014
Krajzewicz D, Nippold R, Lazaro O (2009) iTETRIS deliverable 3.1—traffic modelling: environmental factors, public deliverable
Treiber M, Kesting A, Thiemann C (2008) How much does traffic congestion increase fuel consumption and emissions? Applying a fuel consumption model to the NGSIM trajectory data, presentation no 08-2715. In: Annual meeting of the transportation research board, 13–17 Jan 2008, Washington, DC
Cappiello A, Chabini I, Nam EK, Lue A, Abou Zeid M (2002) A statistical model of vehicle emissions and fuel consumption. In: Proceedings of the IEEE 5th international conference on intelligent transportation systems, pp 801–809. doi:10.1109/ITSC.2002.1041322
Hausberger S, Rexeis M, Zallinger M, Luz R (2009) Emission factors from the Model PHEM for the HBEFA version 3, report nr. I-20/2009 Haus-Em 33/08/679
Technical University of Graz (2014) Pages of the institute for internal combustion engines and thermodynamics (IVT). Accessed 10 Jan 2014
Hausberger S, Krajzewicz D (2014) Deliverable 4.2—extended simulation tool PHEM coupled to SUMO with user guide, public project report. http://www.colombo-fp7.eu/results_deliverables.php
INFRAS (2013) Handbuch für Emissionsfaktoren. http://www.hbefa.net/. Accessed 06 Feb 2014
Schnabel W, Lohse D (1997) Grundlagen der Straßenverkehrstechnik und der Verkehrsplanung. Verlag für Bauwesen, Berlin, pp 557–577. ISBN 3-345-00565-4
Nota R, Barelds R, van Leeuwen H (2005) Harmonoise WP 3—engineering method for road traffic and railway noise after validation and fine-tuning. Harmonoise technical report HAR32TR-040922-DGMR20 (deliverable 18)
Krajzewicz D, Bieker L, Erdmann J (2012) Preparing simulative evaluation of the GLOSA application. In: Proceedings CD ROM 19th ITS world congress 2012, paper id: EU-00630. ITS World Congress 2012, 22.-26. Okt. 2012, Wien, Austria
Krajzewicz D, Wagner P (2011) Large-scale vehicle routing scenarios based on pollutant emission. In: Meyer G, Valldorf J (eds) Advanced microsystems for automotive applications 2011, AMAA 2011. Springer, New York, pp 237–246
Flötteröd Y-P, Wagner P, Behrisch M, Krajzewicz D (2012) Simulated-based validity analysis of ecological user equilibrium. In: Winter simulation conference archive, 2012 Winter simulation conference
Krajzewicz D, Flötteröd Y-P (2013) Simulative Untersuchung abstrakter und realer Verkehrsmanagementansätze zur Emissionsreduktion. In: Kolloquium Luftqualität an Straßen 2013, pp 42–57. Bundesanstalt für Straßenwesen
Josep Vergés T (2013) Analysis and simulation of traffic management actions for traffic emission reduction. TU Berlin, Berlin
BASt (2012) MARLIS—Datenbank mit Maßnahmen zur Reinhaltung der Luft in Bezug auf Immissionen an Straßen, Version 3.1, to be found on BASt web pages
Acknowledgments
The authors want to thank the European Commission for co-funding the work in the context of the projects “iTETRIS”, “COLOMBO”, and “AMITRAN”.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Krajzewicz, D., Behrisch, M., Wagner, P., Luz, R., Krumnow, M. (2015). Second Generation of Pollutant Emission Models for SUMO. In: Behrisch, M., Weber, M. (eds) Modeling Mobility with Open Data. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-319-15024-6_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-15024-6_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-15023-9
Online ISBN: 978-3-319-15024-6
eBook Packages: EngineeringEngineering (R0)