
Abstract
In this chapter a novel approach for the deadbeat control of multivariable discrete time systems is proposed. Deadbeat control is a well known technique that has been implemented during the last decades in SISO and MIMO discrete time systems due to the ripple free characteristics and the designer selection of the output response. Deadbeat control consist in establishing the minimum number of steps in which the desired output response must be reached, this objective is achieved by placing the appropriate number of closed loop poles at the origin and cancelling the transmission zeros of the system. On the other side, constant time delays in the state or the input of the system is a phenomena found in many continuous and discrete time systems, produced by delays in the communication channels or other kind of sources, yielding unwanted effects on the systems like performance deterioration, or instability on the system. Even when the analysis and design of appropriate controllers with constant time delays in the state or the input has been studied by several researchers applying several control techniques such as state and output feedback, in this chapter the development of a deadbeat control for discrete time systems with constant delays is explained as a preamble of the main topic of this chapter related to the deadbeat control of discrete time systems with time varying delays. This first approach is derived by implementing a state feedback controller, and in opposition of the implementation of traditional techniques such as optimal control where a stable gain is obtained by solving the required Riccati equations, the deadbeat controller is obtained by selecting the appropriate gain matrix solving the necessary LMI’s placing the required number of poles at the origin and eliminating the finite transmission zeros of the system in order to obtain the required deadbeat characteristics in which the desired system response is reached in minimun time steps. After this overview, deadbeat controllers are designed considering the time varying delays, following a similar approach such as the constant time delay counterpart. In order to obtain an appropriate deadbeat controller, a state feedback controller gain is obtained by solving the required LMI’s, placing the required poles in order to obtain the desired response cancelling the finite transmission zeros. The theoretical background is tested by several illustrative examples and finally the discussion and conclusions of this work are shown in the end of this chapter.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
In this chapter the derivation and design of deadbeat controllers for multivariable discrete time system is proposed in order to overcome with this problem when time varying delays are found in the states or the input of the system. Deadbeat control is an efficient control technique that has been implemented for decades in single input single output systems SISO and later the design of this controller has been transferred to multi input multi output MIMO systems. Deadbeat control consist in deriving a controller that makes the system variables to reach the steady state value in a minimum number of time steps, this objective is met by placing the right number of poles at the origin and cancelling the finite transmission zeros.
It can be found in literature that deadbeat control can be implemented in SISO systems. one common problem found when this kind of controllers are implemented is ripple, this phenomena occurs when some deviations take place in the error signal at different time steps [11] in order to solve this problem different deadbeat control strategies has been developed by several researcher for example selecting an equivalent deadbeat continuous time system that is equivalent to the discrete time counterpart for both output and input signal [11]. Another well known strategy for the deadbeat control of SISO system is implemented by optimal pole placement design where, as it is known, the proper selection of the closed loop poles of the system is achieved by selecting an appropriate deadbeat compensator [7]. Another approach for deadbeat compensation is shown in the stabilization of SISO system by output feedback in which the derivation of a suitable controller gain is done by implementing an appropriate control algorithm [6].
For the multi input multi output MIMO systems similar approaches to SISO systems has been derived in order to obtain the appropriate deadbeat control, some MIMO deadbeat control strategies are found in literature in which the implementation of state feedback or output feedback controllers are designed in order to set all the system parameters such as poles and transmission zeros in the right position obtaining ripple free deadbeat controllers for SISO discrete time systems as explained in [19] where the effects of ripple are eliminating by avoiding the cancellation of the plant poles by the controller zeros.
In the case of multivariable discrete time system several deadbeat control strategies has been proposed in order to solve this problem either by output feedback or state feedback. Some of this strategies consist in deriving a suitable control law by placing the required poles at the origin and cancelling the transmission zeros. In the case of output feedback deadbeat controller several strategies but with different perspective are found in literature, for example, the derivation of a deadbeat control algorithm by the minimization of a quadratic cost function with cheap control, which means that there is no cost on the input where the main purpose is to drive the output of the system to the final value in a minimum number of time steps [16]. Another deadbeat output feedback control approach is shown in [20] where a similar deadbeat controller design as explained before where an optimal control approach is developed by the minimization of a cost function with no cost on the input (cheap control) and introducing a weighting matrix in the states in order to find a suitable control algorithm to stabilize the system in a minimum number of time steps. In [10] the deadbeat control problem is solved by the implementation of periodic output feedback then two deadbeat control problems are formulated in order to overcome with this problem. Even when output feedback is a common alternative for the solution of deadbeat control problems, a similar approach is found in literature for the solution of this problem implementing state feedback, this is obviously the main approach applicated by the control system community. Most of these works are based on optimal control by minimizing a cost functional as shown in [4, 5] and as explained in [14] the state feedback deadbeat controller is obtained by the solution of the Riccati equations. Another approach is explained in [9] where a minimal energy deadbeat control approach is implemented in order to stabilizes the system.
Even when deadbeat controllers has been implemented in SISO and MIMO systems with no time delay, in this chapter we consider this problem which is an important consideration to take into account because of delay is found in many physical systems, and this phenomena yields many unwanted effects that deteriorate the system response and they are a potential source of instability. In this chapter the deadbeat controller design of multivariable discrete time system with time varying delays in the states and the input of the system are explained in order to design suitable deadbeat controllers that overcome the effects yielded by time delays. Time varying delays are a more feasible representation of the real effects produced by this phenomena due to the variable characteristic of delays in physical systems. However in this chapter the design of deadbeat controller for multivariable discrete time systems with constant time delays are explained first as a preamble of the design of deadbeat controllers for multivariable time varying delay systems. This work is divided in the following sections; In Sect. 2 a short explanation of previous work related to the deadbeat control of discrete time multivariable system is shown, as a preamble of the main topic of this chapter about the design of deadbeat controllers for discrete time MIMO systems with time varying delays. In Sect. 3 the design of state feedback deadbeat controllers for discrete time MIMO systems with constant time delay is developed and explained as a preamble of the main topic of this chapter. In Sect. 4 the design and derivations of state feedback deadbeat controllers for discrete time MIMO systems with time varying delays in the states is shown. In Sect. 5 then the analysis and design of state feedback deadbeat controllers for discrete time MIMO systems with time varying delays in the input is shown to stabilizes this kind of systems. Finally, in Sects. 6 and 7 the respective discussion and conclusions of this work are shown to analyze the results evinced in this chapter.
2 Previous Work
As explained in the previous section, there are different kinds of deadbeat control strategy for SISO and MIMO system, but previous works found in literature for time delay deadbeat control basically are very limited and has not been considered by the control systems community. Even when time delays are considered a source of performance deterioration and instability, this problem has not been treated before and the analysis, design and development of a suitable deadbeat controller for multivariable discrete time systems is necessary due to this physical phenomena produced by communication delays and other sources. Time varying delays are very common in many physical systems, and they can deteriorate the system performance and yield instability, the main problem arises because of this kind of phenomena are more complex than the constant time delay case, so an appropriate mathematical model must be derived taking in count the stability characteristics of the system designing a suitable control strategy, that in this case, a deadbeat controller for MIMO discrete time systems with time varying delays must be designed.
As explained in the previous section, deadbeat control consists in designing an appropriate controller which leads the system variables to reach the steady state values in a minimum number of time steps. This strategy is implemented in the SISO and MIMO cases producing the expected results. In the case of SISO systems, some effective control strategies has been developed in the past that yield the desired system response. In [6] the problem of deadbeat control is solved for the SISO discrete time case, implementing an output feedback controller that is a simple and efficient approach to overcome with this problem. It must be considered that there is a vast amount of control strategies found in literature that deals with this control problem, for example, the implementation of linear quadratic regulators and optimization theory. Apart from this deadbeat control approach for SISO systems, another approach is proposed by [7] where a pole placement algorithm is designed to obtain a suitable deadbeat controller, the incorporation of one closed loop problem which incorporates interpolation constraints with the help of linear programming is proposed by these authors. In [11] a discrete time deadbeat controller for SISO systems is designed based in a continuous time deadbeat controller, considering the possibility of designing a ripple-free deadbeat controller; in this approach the main idea is to prove that a continuous time deadbeat controller is equivalent to the discrete time SISO counterpart, dealing with this control problem. Another ripple—free deadbeat controller for SISO systems is implemented as shown in [19, 21] where this kind of controllers can be designed if and only if the systems poles and zeros are disjoint.
In the case of multivariable deadbeat controllers for discrete time systems the control strategies are based on output and state feedback, where these two approaches are usually solved by the minimization of an optimal control functional and then the gain matrices are obtained by the solution of the required Riccati equations. In [16], the deadbeat control problem is solved by minimizing an optimal control functional with cheap control (no constraints in the inputs) and the poles of the systems are placed in the origin. In [20] this problem is solved by output feedback in which a change of basis on the original discrete time system is implemented in order to place a specified number of poles at the origin and cancelling the finite transmission zeros. In [10], the solution of the deadbeat controller problem is solved by a periodic output feedback at the beginning of the period and then two deadbeat controller strategies are proposed to overcome this problem.
In the case of deadbeat control for multivariable discrete time systems with state feedback there are several works found in literature such as [3–5] where the deadbeat controller design is considered after a change of basis in order to stabilizes the system in a minimum number of time steps. Even when the works related to the deadbeat control of MIMO system with time delays found in literature are limited, previous works related to the stabilization of time delay systems is found by overcoming this problem solving the required LMI’s. The control system design problem can be implemented by static output feedback or state feedback. In the case of constant time delays the derivation of a feasible controller is found in [18] where a simple and systematic method for systems with time delays are explained when this phenomena is found in the input of the system. In the case when time varying delays are present in the inputs or the states, some approaches are found such as the state or output feedback, in [8] where an output feedback controller synthesis is implemented by solving the required LMI’s to find a suitable gain matrix. Another interesting approach can be found in [24] where the stabilization of discrete time fuzzy system is done by obtaining first an stability condition and then the required LMI’s are obtained by implementing a Lyapunov-Krasovskii functional. Finally in [1, 22] the control of uncertain control systems with time delays and the robust stabilization of time delay system is explained where an LMI approach is implemented to solve a robust controller for time delay systems proposing the necessary Lyapunov-Krasovskii functional.
3 Deadbeat Control for Multivariable Systems with Constant Time Delays
In this section the design and development of a deadbeat controller for multivariable discrete time systems with constant time delays is explained as a preamble of the main topic of this book chapter related to the deadbeat control of multivariable discrete time systems with time varying delays. Deadbeat control consist in designing a control system that stabilizes the system in a minimum number of time steps, so the main idea envinced in this section is to design an appropriate deadbeat controller that overcomes the time delay effects when this are present in the states. As it is well known time delays are a source of system performance deterioration and instability, so it is necessary to derive a suitable control strategy that deals with this effect in order to obtain a better performance and avoid instabilities on the system. The theoretical background for the design of deadbeat controllers for multivariable discrete time systems with constant time delays in the states, is obtained by designing an state feedback controller in order to place an specified number of poles at the origin and eliminate the transmission zeros of the system, keeping in mind that the system must be stabilized in minimum time steps. In this case some conditions are established in order to yield the robust stabilization of the system by solving the required LMI’s [12, 13, 17] where the LMI’s conditions are obtained by defining a Lyapunov functional by augmenting the state vector, so by making a change of basis on the system it is possible to design appropriate deadbeat controllers when delays are present in the states.
In this section the derivation of a state feedback controller is shown to proved that is possible to obtain a feasible gain matrix by solving the required LMI’s instead of the optimal control approach found in literature [2] so establishing the required Lyapunov function it is possible to obtain the LMI’s that are implemented to find the controller gain matrix by solving an optimization problem. The deadbeat controller synthesis is obtained by a Lyapunov approach that is more effective than the solution of a optimal control problem and the main advantage of this approach, is that the controller synthesis can be obtained by a \(H_{\infty }\) approach [15, 23] where a robust controller design can be done by selecting an appropriate gain that improves the disturbance rejection properties and unmodelled dynamics of the system. The derivation of the state feedback deadbeat controller for multivariable discrete time systems with constant time delays, consist in implementing a change of basis of the original system in order to obtain \((n-p)\) eigenvalues of the system at the origin where p are the finite transmission zeros of the system and n is the state dimension.
3.1 Deadbeat Control Design for Multivariable Discrete Time System with Constant Time Delay
The deadbeat controller design for multivariable control systems with constant time delays in the state consist in finding a stable state feedback matrix gain, this gain is found by implementing the required LMI’s that results from establishing a Lyapunov functional to analyze and design a stable controller according to the Lyapunov stability theorem. The first step in the design of deadbeat controller for system with constant time delays is to established the minimum time steps in which the system is stabilized, this objective is reached by implementing a change of basis in order to obtain \((n-p)\) eigenvalues at the origin where n is the state dimension and p is the number of stable transmission zeros of the system. Then the linear matrix inequalities LMI’s are found by implementing a Lyapunov functional.
In order to design the deadbeat controller for multivariable discrete time systems, the following discrete time model with state delays must be considered:
where \(x(k) \in \Re^{n}\) is the state vector, d is a nonnegative integer that represent the delays, \(u(k) \in \Re^{m}\) is the input vector and \(y(k) \in \Re^{l}\) is the measured output.
Definition 1
In order to design a stable state feedback deadbeat controller, system (1) must be controllable and observable.
Define the following state feedback control law that is implemented for the deadbeat control of multivariable discrete time systems.
This control law is selected in order to obtain the deadbeat controller of the system, that is, stabilizing the system in a minimum number of time steps. This requirement is met by analyzing the steady state solution of the system where the initial condition of the system is transferred to the final value in a minimum number of time steps. The solution of the system is obtained recursively to obtain the deadbeat response of the system:
where \(x(0)\) is the initial condition of the system. Then the control law is defined to stabilizes the system by deadbeat, in order to drive the system to the desired final value.
where μ is the minimum number of steps to reach the final value infinite time. This objective is achieved by selecting the appropriate value of μ in order that the \(n-p\) eigenvalues of A be located at the origin and the rest are pick in order to coincide with the system’s zeros [20], where n is the state dimension and p is the number of stable transmission zeros of the system.
In order to design the deadbeat controller it is necessary to apply a change of basis for the original systems, considering the following similarity transformation matrix:
In order to design the deadbeat controller it is necessary to select \(n-p\) linear independent vectors for the basis where n is the state dimension and p is the number of finite transmission zeros of the system. The following similarity transformation is implemented in order to make a change os basis:
Then the resulting closed loop system implementing the state feedback control law is:
and then for model reduction the following equivalent matrices are defined:
Transforming [7] in:
Selecting \(C_{p}\) such as the system has transmission zeros at infinity.
In order to obtain the gain matrix \(K_{{ \star }}\) the following theorem must be considered in order to find this matrix by a LMI approach finding the required matrices to assured the closed loop system stability.
Theorem 1
The closed loop stability of system [9] is assured if there exist positive definite matrices \(Q > 0\) and \(P > 0\) found by solving the following linear matrix inequality in order to solve for the gain matrix \(K_{{ \star }}\)
where \(\Phi\) is defined later.
Proof
Consider the following Lyapunov-Krasovskii functional [2, 12, 13]:
Considering that \(\Delta V(k) = V(k + 1) - V(k)\), the first derivative of the Lyapunov functional is:
where \(\Phi = A_{p} - B_{p} K_{*}\)Then defining an augmented state vector as shown in (13):
Then the following representation of \(\Delta V(x(k))\) is:
So by solving the following LMI the resulting matrices P, Q and \(K_{{ \star }}\) are found [2]:
After defining the conditions in order to find a stable deadbeat controller gain matrix, a deadbeat controller can be designed in order to meet all the system performance requirements according to the deadbeat specifications. In order to clarify the theoretical background of this section an illustrative example is done to analyze the performance of a numerical example.
3.2 Example 1
Consider the following multivariable discrete time system with constant time delays in the states.
where d = 1 s and sampling period T s = 10 s. Then the following matrices are found by solving the respective LMI expressed in (10) at different minimum time steps. For \(\mu = 2\) the following transformation matrix is implemented:
obtaining
For \(\mu = 1\) the following transformation matrix is implemented:
Obtaining:
For \(\mu = 0\) The following transformation matrix is implemented:
Obtaining:
In Fig. 1 the systems response of the variable \(x_{1}\) is depicted, for the three minimum time steps, \(\mu = 0,1,2\), given for the design of deadbeat controller where as can be noticed the desired system response is reach with a minimum time according to the selection of the transformation matrix and the parameter \(\mu\). So the system objective are reached by a proper selection of the system poles and transmission zeros keeping the stability properties of the system.

System response for the variable x 1
In Fig. 2 the system response of the variable \(x_{2}\) is depicted, showing that this system variable reaches the desired final value after a minimum number of time steps according to the parameter setting \(\mu\). The system variable \(x_{2}\) follows a similar trajectory as the variable \(x_{1}\), so the system is stabilizes as required by the deadbeat controller design. The variables \(x_{1}\) and \(x_{2}\) are required to follow a specified trajectory in a minimum time when a step reference signal change the setpoint to one in t = 0 s. As it is corroborated later the system variables reach the desired value from an specified initial conditions \([0,0]^{T}\) to the desired final values as specified in (4).

System response for the variable x 2
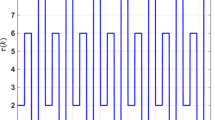
In Fig. 3 the system error signal for the variable \(x_{1}\) is shown where as it is corroborated the signal error is kept into the desired range due to the stabilization of the system variables. The gain matrix \(K_{\infty }\) found by solving the required LMI, minimize the errors between the reference signal and the output signal as long as possible because of the poles are placed in the required position to minimize the error due to a proper selection of the gain matrix.

System error for the variable x 1
In Fig. 4 the system error variable for \(x_{2}\) is shown and as it is corroborated the error signal is kept into a small margin as expected, according to the design procedure. The selection of an appropriate gain matrix \(K_{{ \star }}\) drive the system variables to the desired final value so the error margin is as small as possible because of the appropriate pole placement and transmission zeros allocation.

System error for the variable x 2
In this section the development and design of deadbeat controllers for multivariable discrete time systems with constant time delays is explained. It is proved that this kind of systems can be stabilized by a state feedback control law according to the stability properties of the system, established by a proper selection of a Lyapunov-Krasovskii functional in order to obtain the stability conditions of the system and establishing the linear matrix inequalities to find positive definite matrices that meet the stability conditions.
The deadbeat controller explained in this section is developed by designing an appropriate state feedback control law which drive the system states to the steady state values in a minimum number of time steps. This objective is accomplished by solving the resulting LMI obtained by a Lyapunov approach, as it is explained in the works of [15, 23] this deadbeat controller design can be done by solving a \(H_{\infty }\) control problem to improve the closed loop system robustness and makes the system more reliable when external disturbances and unmodelled dynamics are present in the model.
The development of a deadbeat controller for multivariable discrete time systems with constant time delays is done as a preamble for the main topic of this chapter, related to the state feedback controller design of deadbeat controllers for multivariable discrete time systems with time varying delays. The theoretical background for constant time delay systems shown in this section are the basis for the design of deadbeat controller when time varying delays are present in the models. That is the main reason to begin with this topic to show the fundamentals of deadbeat control for time delay systems. Finally, the application of the theoretical background explained in this section is illustrated by a numerical example to analyze the system performance with different time steps parameters.
4 Deadbeat Control for Multivariable Systems with Time Varying Delays in the States
In this section the development and design of deadbeat controllers for multivariable systems with time varying delays in the state is shown. Time varying delays are common in many kinds of systems produced by communication delays and other kind of sources, this effect is the main origin of many unwanted effects such as performance deterioration and instability, therefore, time delay systems has increased the interest on this kind of problems in the control system community. Two kinds of stability conditions have been reported in literature, the delay dependent condition (the condition containing delay information) and delay independent condition (the condition without containing delay information) [25], so this conditions must be considered in order to design an appropriate deadbeat controller for multivariable discrete time system with state delay. Many of the works found in literature about discrete time multivariable systems with state delays, propose a solution for this kind of problems by designing an appropriate Lyapunov-Krasovskii functional in order to assure the stability of the systems even when delays are present in the state of the system [12, 17, 25]. The Lyapunov-Krasovskii functional is selected in order to assure the robust stability of the system of discrete time systems with time varying delays, so this approach is suitable for the state feedback design of deadbeat controllers. Then after designing the right Lyapunov-Krasovskii function, this kind of problems can be solved by a convex optimization problem represented as linear matrix inequalities LMI’s in order to obtain the right selection of the controller parameters.
As explained in the previous section, the deadbeat controller design for multivariable discrete time systems is usually solved as an optimal control problem where a cost functional is minimized, implementing a cheap control functional (with no input function), and then finding the required matrices by solving the respective Riccati equation. Even when this approach yields acceptable results, the solution of the stability conditions for this kind of problems is more efficient when the solutions are found by a convex optimization problem defined by the linear matrix inequalities LMI’s when time varying delays are found in the states of discrete time systems. The design and development of deadbeat controllers for multivariable discrete time systems with time varying delays is done by following a similar approach as constant time delay systems, as explained in the previous section; first, a change of basis is necessary to place the required poles at the origin and cancel the transmission zeros, selecting the suitable system matrices, in order to obtain a deadbeat controller characteristics. Then, the discrete time model with time varying state delays is considered by designing an appropriate Lyapunov-Krasovskii functional to establish the stability conditions of the model when the system has time delays in its states. Finally, the required matrices are found by solving a convex optimization problem given by the linear matrix inequalities LMI’s. In the following subsection the derivation of the deadbeat controller for multivariable discrete time systems with time varying delays in the states is done in order to solve this control system problem. A numerical simulation example is shown in order to illustrate the results obtained in this section.
4.1 Deadbeat Control Design for Multivariable Discrete Time System with Time Varying Delays in the States
The design of deadbeat controllers for multivariable discrete time systems with time varying delays follows a similar procedure as in the constant time delay systems case. In order to design a suitable controller is necessary to make a change of basis on the original system, in order to place \((n-p)\) poles at the origin where n is the state dimension and p is the number of finite transmission zeros of the system. This requirement is met by selecting a appropriate basis which includes \((n-p)\) linear independent vectors to form a basis on \(\Re^{n}\). Then by selecting an appropriate Lyapunov-Krasovskii functional in order to establish the stability conditions of the system the gain matrix can be found to be implemented in a state feedback form in order to stabilizes the system in a minimum number of time steps.
In order to design the deadbeat controller for multivariable discrete time systems with time varying state delays, the following system must be considered:
where \(x(k) \in \Re^{n}\) is the state vector, \(\tau (k)\) is a nonnegative time varying integer that represent the delay, \(u(k) \in \Re^{m}\) is the input vector and \(y(k) \in \Re^{l}\) is the measured output.
The following condition is met by the time varying delay
where \(\tau_{1}\) is the lower bound represented by a positive integer and \(\tau_{2}\) is the upper bound represented by a positive integer.
Define the following state feedback control law that is implemented for the deadbeat control of multivariable discrete time systems.
In order to obtain a deadbeat controller it is necessary to make a change of basis by the following transformation matrix
where \((n - p)\) linearly independent vectors must be selected in order to make a basis for the original system. Where n is the state dimension and p is the number of finite transmission zeros of the system. Then the original system is transform into:
Then the closed loop system is given by:
and then for model reduction the following equivalent matrices are defined:
Transforming (28) in:
Selecting \(C_{p}\) as long as the system includes transmission zeros at infinity.
In order to stabilizes the system by deadbeat control the following theorem must be implemented to find the appropriate matrices for the deadbeat state feedback controller for discrete time systems.
Theorem 2
The closed loop stability of system [9] is assured if there exist positive definite matrices \(Q > 0\) and \(P > 0\) found by solving the following linear matrix inequality in order to solve for the gain matrix \(K_{{ \star }}\) that stabilizes the system in a minimum number of time steps \(k\)
where \(\Phi\) is defined later.
Proof
Consider the following Lyapunov-Krasovskii functional [8, 12, 17, 25]:
where
Considering that \(\Delta V_{i} (k) = V_{i} (k + 1) - V_{i} (k)\) the derivative of each term of the Lyapunov-Krasovskii functional yield [25]:
where \(\Phi = A_{p} - B_{p} K_{*}\)
In order to resolve for \(\Delta V_{3} (x^{\prime}(k))\) the following change of variable must be applied:
Obtaining the following result due to:
Then computing \(\Delta V_{2} (x^{\prime}(k)) + \Delta V_{3} (x^{\prime}(k))\) and due to \(\tau (k) \le \tau_{2}\)
and due to \(\tau_{1} \ge 0\)
Therefore the following upper bound is valid for:
Then defining a vector:
and a matrix \(\phi\), then the following limit for \(V(x^{\prime}(k))\) the following inequality is obtained:
so the following linear matrix inequality is obtained in order to assure the system stability [12]:
where k is the minimum time step of the system and P and Q are matrices that assure the stability of the system, these matrices are necessary to find the gain \(K_{*}\). With these derivations the proof is complete.
With this linear matrix inequality the required matrices are found in order to meet the stability conditions and then the deadbeat controller designed by state feedback can be implemented in order to stabilize multivariable discrete time systems in a minimum number of time steps.
It is important to notice that the minimum number of time steps is given by the variable k so in order to stabilizes the system in minimum time this variable along with the appropriate number selection of linear independent vectors for the transformation matrix, place the required number of poles at the origin and cancel the finite transmission zeros of the system. As can be noticed, the deadbeat controller design is similar to the constant delay counterpart, but as explained in the previous section, an important fact that must be considered is the appropriate selection of a Lyapunov-Krasovskii functional, because with this functional the stability conditions and the linear matrix inequality to find the gain matrix that stabilizes the system by a state feedback control law.
In the next subsection, an illustrative numerical simulation is done in order evince the performance and advantage of this control strategy and to obtain some conclusions about this section.
4.2 Example 2
Consider the following multivariable discrete time system with constant time delays in the states.
with \(k = 5\), \(\tau_{1} = 14\), \(\tau_{2} = 48\), sampling period T s = 10 s and the transformation matrix \(T\)
The following matrices are obtained:
with \(k = 25\), \(\tau_{1} = 5\), \(\tau_{2} = 29\) and the transformation matrix T
The following matrices are obtained:
with \(k = 10\), \(\tau_{1} = 1\), \(\tau_{2} = 79\) and the transformation matrix T
The following matrices are obtained:
The simulation results are shown below:
In Fig. 5 the system response of the variable \(x_{1}\) is shown, where as it is expected, the system trajectory for the three cases is driven from the initial value to the final value following a step function trajectory. As it is corroborated later the trajectory path is follow efficiently while the error is minimized.

System response of the variable x 1
In Fig. 6 the system response of the variable \(x_{2}\) is shown, where as it is expected, the system trajectory for the three cases is driven from the initial value to the final value following a step function trajectory. The tracking error is minimized in order to make the variable trajectory to follow the reference path. It can be noticed that the final value is reach in a greater number of time steps than the minimum value required in order to obtain a deadbeat response.

System response of the variable x 2
In Fig. 7 the error signal for the variable \(x_{1}\) is shown, where as it is corroborated the error signal is kept in a small margin in order to make this variable to follow the reference efficiently.

System error of the variable x 1
In Fig. 8 the error signal for the variable \(x_{2}\) is shown, where as it is corroborated the error signal is kept in a small margin in order to make this variable to follow the reference efficiently. The error signal depicted in Fig. 8 shows how the deadbeat controller improves the system performance while minimizing the tracking error, this is an important characteristics that must be considered in order to make the system, variables to reach the desired values in a minimum number of time steps reducing the steady state error in the case of multivariable discrete time systems with time varying delays when different values of the system parameters.

System error of the variable x 2
In this section the development and design of deadbeat controllers for multivariable discrete time systems with time varying delays is proposed. In order to design an efficient deadbeat controller for this kind of system, it is important to recognize the system properties in term of the system poles and transmission zeros of the model. A change of basis is required in order to place a specified number of closed loop poles at the origin and cancelling the transmission zeros of the original system.
After a change of basis, considering that dealing with time varying delays is not an easy task, the specification of an appropriate Lyapunov-Krasovskii functional establishes the stability conditions of the system taking in count the time varying characteristics of the time delay model. By the specification of the Lyapunov-Krasovskii functional the resulting linear matrix inequalities LMI’s are implemented in order to obtain the required matrices that establish the stability conditions in order to obtain a feasible controller gain for the deadbeat controller represented by a state feedback control law.
In this section an illustrative numerical example is done in order to show the system response of a multivariable discrete time system with time varying delays in the states stabilized by a deadbeat controller. It is proved that the state variables reach the desired value when a step reference signal is applied to the input of the system. The error signal of the system is kept into a small margin as expected by the deadbeat control system specifications, improving the system performance. In the following section, a similar problem is solved but in this case the design of deadbeat controllers for multivariable discrete time systems with time varying delays in the inputs is considered.
5 Deadbeat Control for Multivariable Systems with Time Varying Delays in the Inputs
In this section the development and design of deadbeat controllers for multivariable discrete time systems with time varying delays in the input is explained in order to find a suitable state feedback control that meets the stability condition along by driving the system states to the desired final value in a minimum number of time steps. Similar as the stabilization of discrete time systems with time varying delays on the state, time varying delays in the input are produced by signal transmission lags and other effects yielded by the implemented hardware, this phenomena is a sources of many unwanted effects such as system performance deterioration and even instability. The time varying delay characteristics when this phenomena is found in the state of the system, are very similar when time varying delays are found in the input, so the deadbeat controller synthesis for multivariable discrete time system in the states is very similar to the case explained in the previous section. In order to design suitable deadbeat controllers for multivariable discrete time systems with time varying delays in the inputs, it is necessary to make a change of basis of the original system, in order to place a \((n-p)\) number of poles at the origin, where n is the state dimension and p is the number of finite transmission zeros of the original system. Then by making an appropriate selection of the transformation matrix, in which \((n-p)\) linear independent vectors must be selected, the original closed loop system is transformed to another coordinate system, and then the deadbeat controller synthesis can be done by finding the required state feedback control gain. Similar as the controller synthesis of discrete systems with time varying delays in the states, instead of solving this problem by an optimal control problem minimizing a cost functional or cheap control (no cost on the input), the approach evinced in this section is based on the proper selection of a Lyapunov-Krasovskii functional in order to establish the necessary stability conditions of the system, in order to find an stable state feedback gain that drives the system to the desired final in a minimum number of time steps to meet the conditions of the deadbeat controller. After selecting an appropriate Lyapunov-Krasovskii functional, a suitable gain matrix can be found by solving a convex optimization problem established by the required linear matrix inequalities.
In the first part of this section, the derivation of deadbeat controllers for multivariable discrete time system with time varying delays in the inputs is developed in order to find a state feedback control gain to obtain a deadbeat response in which the states are driven to the desired final value in a minimum number of time steps, this requirement is met by selecting an appropriate transformation matrix to make a change of basis and the selection of an appropriate Lyapunov-Krasovskii functional. In the second part of this section, a numerical simulation example is done in order to show the deadbeat response of the system states with the required gain matrix found by solving a set of linear matrix inequalities LMI.
5.1 Deadbeat Control Design for Multivariable Discrete Time System with Time Varying Delays in the Inputs
The derivation of a deadbeat controller for multivariable discrete time systems with time varying delays in the inputs, follows a similar procedure as explained in Sect. 4, where a change of basis of the original model must be done, in order to make a change of coordinates; this objective is achieved by selecting an appropriate transformation matrix in order to place \((n-p)\) poles at the origin and cancelling the finite transmission zeros of the closed loop system. Then selecting an appropriate Lyapunov-Krasovskii functional in order to established the required stability conditions of the system and find the appropriate gain matrix that stabilizes the system by solving the resulting linear matrix inequalities.
Consider the following discrete time system with time varying delays in the inputs:
where \(x(k) \in \Re^{n}\) is the state vector, \(\tau (k)\) is a nonnegative time varying integer that represent the delay, \(u(k) \in \Re^{m}\) is the input vector and \(y(k) \in \Re^{l}\) is the measured output.
The following condition is met by the time varying delay
where \(\tau_{1}\) is the lower bound represented by a positive integer and \(\tau_{2}\) is the upper bound represented by a positive integer. Define the following state feedback control law that is implemented for the deadbeat control of multivariable discrete time systems.
In order to obtain a deadbeat controller it is necessary to make a change of basis by the following transformation matrix
The first step in order to design a deadbeat controller it is necessary to find the minimum number of time steps to stabilizes the system from the initial condition.
where k is the minimum number of time steps. Then the following change of basis is done in order to place the required poles and transmission zeros by state feedback.
and then for model reduction the following equivalent matrices are defined:
Choosing \(C_{p}\) to cancelled the finite transmission zeros of the system. In order to stabilizes the system by deadbeat control the following theorem must be implemented to find the appropriate matrices for the deadbeat state feedback controller for discrete time systems.
Theorem 3
The closed loop stability of system [9] is assured if there exist positive definite matrices \(Q > 0\) and \(P > 0\) found by solving the following linear matrix inequality in order to solve for the gain matrix \(K_{{ \star }}\) that stabilizes the system in a minimum number of time steps k
Proof
Consider the following Lyapunov-Krasovskii functional [8, 12, 17, 25]:
where
Due to \(\Delta V_{i} (k) = V_{i} (k + 1) - V_{i} (k)\), the derivative of each term of the Lyapunov-Krasovskii functional yield [25]:
In order to resolve for \(\Delta V_{3} (x^{\prime}(k))\) the following change of variable must be applied:
Obtaining the following result due to:
Then computing \(\Delta V_{2} (x^{\prime}(k)) + \Delta V_{3} (x^{\prime}(k))\) and due to \(\tau (k) \le \tau_{2}\)
and due to \(\tau_{1} \ge 0\)
Therefore the following upper bound is valid for:
Then defining a vector:
and a matrix \(\phi\), then the following limit for \(V(x^{\prime}(k))\) the following inequality is obtained:
so the following linear matrix inequality is obtained in order to assure the system stability [12]:
where k is the minimum time step of the system and P and Q are matrices that assure the stability of the system, these matrices are necessary to find the gain matrix \(K_{*}\). With these derivations the proof is complete.
With this theorem, the stability of the multivariable discrete time system is assured and the corresponding matrices for the deadbeat controller by state feedback can be found in order to stabilizes the system in a minimum number of time steps. Even when dealing with time varying delays in the inputs is not an easy task it is confirmed that a feasible matrix gain can be found in order to place the required number of closed loop poles at the origin cancelling the finite transmission zeros of the original system.
In the following section an illustrative numerical example is shown in order to visualize the theoretical background explained in this section and analyze the performance of a numerical model when a deadbeat controller is designed for a multivariable discrete time system with time varying delays in the inputs.
5.2 Example 3
Consider the following multivariable discrete time system with constant time delays in the inputs.
with \(k = 5\), \(\tau_{1} = 14\), \(\tau_{2} = 58\), sampling period T s = 10 s and the transformation matrix T
The following matrices are obtained:
with \(k = 50\), \(\tau_{1} = 5\), \(\tau_{2} = 29\) and the transformation matrix T
The following matrices are obtained:
with \(k = 10\), \(\tau_{1} = 1\), \(\tau_{2} = 79\) and the transformation matrix T
The following matrices are obtained:
The simulation results are shown below:
In Fig. 9 the system response of the variable \(x_{1}\) is shown where as it can be noticed the system response in the three cases depicted in this figure shows how this variable reach the desired final value in a minimum number of time steps. This system variable behaviour is obtained due to an appropriate selection of the gain matrix implemented by a state feedback controller in order to stabilizes the system in a minimum number of time steps according to the deadbeat controller design. As it is corroborated later, the deadbeat controller is designed in order to minimize the system error by an appropriate poles and transmission zeros of the system.

System response of the variable x 1
In Fig. 10 the system response of the variable \(x_{2}\) is shown in order to observe the system performance of this variable in the three cases as explained before. As it can be noticed, the system response depicted in this figure shows how this system variable is stabilized in a minimum number of time steps by the selection and implementation of an appropriate gain matrix in a state feedback form which meet the deadbeat response requirements. This objective is reached by selecting a suitable controller gain matrix in order to place the poles and the transmission zeros of the system in the right position.

System response of the variable x 2
In Fig. 11 the error signal of the variable \(x_{1}\) is shown. As can be noticed the tracking error of this variable is kept in a small margin as expected due to an appropriate selection of the gain matrix, obtained by solving the linear matrix inequalities LMI in the three cases. An appropriate selection and placement of the poles and transmission zeros of the closed loop system makes the error signal of this variable as small a possible when a step reference function is applied in the system inputs.

Error signal of the variable x 1
In Fig. 12 the error signal of the variable \(x_{2}\) is shown and as can be noticed a small tracking error margin is obtained by an appropriate selection of the gain matrix derived from the solution of the linear matrix inequality in the three cases. The deadbeat response of the system is obtained due to an appropriate selection of the transformation matrix in order to make a change of basis and later a suitable gain matrix is obtained by solving the required linear matrix inequalities.

Error signal of the variable x 2
In this section the development of a deadbeat controller for multivariable discrete time system with time varying delays in its inputs is shown in order to design a controller which drives the system from its initial values to the desired final value in a minimum number of time steps. This objective is accomplished by selecting an appropriate transformation matrix in order to make a change of basis or a change of coordinates from the original model to solve this problem by a state feedback controller. Even when dealing with time varying delays in the inputs of the system are difficult to analyze, it is possible to stabilizes this kind of systems by selecting an appropriate Lyapunov-Krasovskii functional in order to analyze the closed loop stability of the system and establish the stability conditions that are represented by linear matrix inequalities LMI’s in order to obtain the gain matrix that guarantees the stability of the system by maintaining the required deadbeat response. In this section, it is proved that understanding the deadbeat controller for multivariable time system with time delays in the states is very important in order to consider the time varying delays in the system input case, because a similar approach can be implemented in both cases when delays are found by different sources such as signal transmission lags, damaged hardware, etc.
With the derivation and design of the proposed techniques showed in this chapter the discussion and analysis of the three control strategies shown in this chapter. Later, the conclusions of this work are evinced to expose the advantages, disadvantages and characteristics of the proposed control strategies shown in this paper.
6 Discussion
In this chapter the derivation of deadbeat controllers for multivariable discrete time systems with time varying delays is exposed. It is proven that a system with deadbeat response can be obtained by selecting a state feedback gain matrix that meets the stability requirements in order to stabilizes the system in a minimum number of time steps. From the results obtained in Sect. 3, where a deadbeat controller for multivariable discrete time systems with constant time delays is obtained, it is proved that by selecting an appropriate Lyapunov-Krasovskii functional, the stability conditions of the system are established in order to meet the system performance requirements, even when this is a basic form in which delays are found in physical systems, the main objective for the analysis of discrete time systems with constant time delays is to develop a feasible control strategy that is used later in the design of deadbeat controllers for discrete time systems with time varying delays, considering the complexity of this kind of models when this phenomena is found in the systems. As it is verified, when constant time delays are found in the system, the unwanted effects yielded by time delays, such as performance deterioration or even instability, are cancelled by placing the right number of poles at the origin while cancelling the finite transmission zeros, for this purpose, a change of basis is necessary in order to find later the required state feedback gain matrices that places the poles and transmission zeros of the model in the right position. The simulation results obtained in this section, evince the deadbeat system response and, as can be checked, the system is stabilized in a minimum number of time steps as established by the appropriate selection of poles and transmission zeros avoiding the unwanted effects yielded by time delays, that in this case, are found in the system states. The main idea of the analysis and design of deadbeat controllers for discrete time systems with constant state delays, is to introduce the basic concepts about how to deal with discrete time systems with time delays, in order to overcome this kind of problems later in the time varying delay case. For the design of deadbeat controllers for multivariable discrete time systems with time varying delays in the states, a similar approach when constant time delays are found in the states is followed, considering the complexity of time varying delays, a required Lyapunov-Krasovskii functional is proposed in order to obtain the stability conditions for this kind of systems to implement a state feedback controller with deadbeat response properties stabilizing the system in a minimum number of time steps. As in the constant time delays in the states case, the first step, a change of basis or a change of coordinates is necessary in order to cancel the finite transmission zeros of the system obtaining the closed loop system state feedback gain matrix that is found by a convex optimization problem, established by solving the linear matrix inequalities LMI’s in order to meet all the system stability requirements of the model. In Sect. 4 an illustrative numerical example is shown in order to evaluate the system performance when a deadbeat controller is implemented in a multivariable discrete time system with time varying delays in the states. It is found that the deadbeat system response is accomplished by solving the required linear matrix inequalities finding the state feedback gain matrix that meets the stability conditions. It can be verified that the deadbeat system response is obtained when three different minimum time steps requirements are established in order to compare the system performance in the three cases and to analyze the tracking errors of the model when different time varying delays characteristics in the model are implemented. In Sect. 5, the design of deadbeat controllers for multivariable discrete time systems with time varying delays in the inputs is evinced where a similar approach as the two cases explained before is implemented in order to find a suitable controller that meets the stability requirements while keeping a deadbeat response. The design procedure explained in this section consist in making a change of basis of the original system, similar as the deadbeat approach when time varying delays are found in the states, in order to place the required poles at the origin and cancelling the finite transmission zeros. Then a Lyapunov-Krasovskii functional is proposed in order to establish the stability conditions when time varying delays are found in the inputs. Then this problem is solved by establishing the linear matrix inequalities LMI’s which provide the necessary conditions to obtain the state feedback gain matrix that yields a deadbeat response on the system. Similar as the previous cases, an illustrative numerical example is shown to test the proposed control algorithm when time varying delays are found in the inputs. The results of this simulation show that the deadbeat controller stabilize the system in a minimum number of time steps, as required by the deadbeat controller design, when time varying delays are found in the inputs of the system. The tracking error of the system is minimized by obtaining an appropriate state feedback gain matrix solving the linear matrix inequalities LMI’s that establishing the stability conditions of the system. As a concluding remark of the three control strategies proposed in this chapter, it can be verified that effective deadbeat controllers can be designed in order to reach the desired final value given by the reference signal and with any initial condition in a minimum number of time steps, these results are achieved by an appropriate selection of the closed loop poles and transmission zeros which define the conditions in which a deadbeat response of the system can be obtained when time delays are found in the system avoiding or cancelling the unwanted effects yield by this phenomena.
7 Conclusions
In this chapter the derivation of deadbeat controllers for multivariable discrete time systems with time varying delays in the states and the inputs is proposed. In the first part of this chapter the derivation of deadbeat controller for multivariable discrete time systems with constant time delays in the state is analyzed. The deadbeat controller proposed is based in a change of coordinates of the original model in order to place a required number of poles at the origin while cancelling the finite transmission zeros, then considering this change of basis a Lyapunov-Krasovskii functional is proposed in order to establish the stability conditions of the model. The deadbeat controller is obtained by a state feedback control law in order to stabilize the system in a minimum number of time steps while minimizing the tracking error of the system when a step function is used as the reference signal of the closed loop system. In order to find the required state feedback matrix gain, it is necessary to solve the required linear matrix inequalities that guarantees the stability of the system. This linear matrix inequalities LMI’s are designed to obtain the required matrices that assures the stability of the system including the state feedback gain matrix that stabilizes the closed loop system in a minimum number of time steps.
Based on the derivation and design of deadbeat controllers for multivariable discrete time systems with constant time delays in the states, a time varying delay version is implemented for the design of deadbeat controllers for multivariable discrete time systems with time varying delays in the states. It is proved that in the constant delays and time varying delay cases it is possible to find stable deadbeat controllers by selecting an appropriate transformation matrix in order to make a change of basis for the original system in order to place the required number of closed loop poles at the origin and cancelling the finite transmission zeros. Then by designing an appropriate Lyapunov-Krasovskii functional, similar as the constant time delay case, the stability conditions are established in order to derive the necessary linear matrix inequalities LMI’s implemented to find the controller gain that stabilizes the system in a minimum number of time steps. Similar as the constant time delay case, a state feedback control law is implemented to place the required poles and transmission zeros in the required position in the complex plane to obtain stable deadbeat controllers that drive the states to the desired final value independently of the initial conditions imposed on the model.
In the third case, the deadbeat controller design for multivariable discrete time systems with time varying delays in the inputs is considered, and following a similar approach as the previous two cases, a change of basis is necessary to place the poles and transmission zeros in the right position in the complex plane by implementing a state feedback control law in order to drive the states of the system to the desired final value independently of the initial conditions of the model. A Lyapunov-Krasovskii functional is implemented to establish the necessary stability conditions of the closed loop system and derive the required linear matrix inequalities LMI’s to find the resulting matrices that prove the stability of the system. By solving a convex stabilization problem, the required state feedback matrix is found in order to stabilize the system and obtaining a deadbeat response. This objective is achieved by solving the required linear matrix inequalities in order to drive the system states in a minimum number of time steps, as required by the deadbeat controller design. In order to test the system performance for the three cases explained in this article, a series of numerical simulation examples were performed to exposed the system performance when time delays are found in the system. It was proved that the stabilization of multivariable discrete time systems with time delays by deadbeat controllers is a feasible and efficient control approach when this phenomena are found in this kind of systems. It is proved that many of the unwanted effects yield by time delays, such as performance deterioration and instability, are cancelled by selecting the appropriate deadbeat controller, minimizing the tracking errors of the system while a step input function is used as a reference signal of the model.
References
de Souza, C.E., Coutinho, D.: Robust stability and control of uncertain linear discrete-time periodic systems with time-delay. Automatica 50(2), 431–441 (2014)
Debeljkovic, D., Dimitrijevic, N., Popov, D., Stojanovic, S.: On Non-Lyapunov stability of linear discrete time delay systems: LMIs approach. In: Proceedings of the 10th World Congress on Intelligent Control and Automation, IEEE, Beijing, China, 6–8, July 2012
Eldem, V., Selbuz, H.: On the general solution of the state deadbeat control problem. IEEE Trans. Autom. Control 39(5), 1002–1006 (1994)
Emami-Naeini, A.: Deadbeat control of linear multivariable generalized state-space systems. In: Proceedings of the 29th Conference on Decision and Control Honolulu, IEEE, Hawaii, (1990)
Emami-Naeini, A.: Deadbeat control of linear multivariable generalized state-space systems. IEEE Trans. Autom. Control 37(5), 648–652 (1992)
Genesio, R., Tesi, A.: The output stabilization of SISO bilinear systems. IEEE Trans. Autom. Control 33(10), 950–952 (1988)
Halpern, M.E., Evans, R.J., Hill, R.D.: Optimal pole placement design for SISO discrete-time systems. IEEE Trans. Autom. Control 41(9), 1322–1326 (1996)
He, Y., Wu, M., Liu, G.-P., She, J.-H.: Output feedback stabilization for a discrete-time system with a time-varying delay. IEEE Tras. Autom. Control 53(10), 2372–2377 (2008)
Jordan, D., Korn, J.: Deadbeat algorithms for multivariable process control. IEEE Trans. Autom. Control 25(3), 486–491 (1980)
Kaczorek, T.: Deadbeat control of linear discrete-time systems by periodic output-feedback. IEEE Trans. Autom. Control 31(12), 1153–1156 (1986)
Katoh, H., Funahashi, Y.: Continuous-time deadbeat control for sampled-data systems. IEEE Trans. Autom. Control 41(10), 1478–1481 (1996)
Leite, V. J. S. and Miranda, M. F., 2008. Stabilization of discrete time-varying delay systems: a convex parameter dependent approach. In: 2008 American Control Conference Westin Seattle Hotel, IEEE, Seattle, Washington, USA, 11–13, June 2008
Leite, V.J. S., Tarbouriech, S., Peres, P.L. D.: A convex approach for robust state feedback control of discrete-time systems with state delay. In: Proceeding of the 2004 American Control Conference Boston, IEEE, Massachusetts, 30 June, 2 July, 2004
Lewis, F.L.: A general riccati equation solution to the deadbeat control problem. IEEE Trans. Autom. Control 27(1), 186–188 (1982)
Man, S., Zhenpu, G., Peng, L.: Delay-dependent robust H infinity control for discrete systems with time-delay and polytopic uncertainty. In: Proceedings of the 29th Chinese Control Conference, IEEE, Beijing, China, 29–31 July, 2010
Marrari, M.R., Emani-Naeini, A., Franklin, G.F.: Output deadbeat control of discrete-time multivariable systems. IEEE Trans. Autom. Control 34(6), 644–648 (1989)
Miranda, M.F., Leite, V.J.S., Caldeira, A.F.: Robust stabilization of polytopic discrete-time systems with time-varying delay in the states. In: 49th IEEE Conference on Decision and Control, IEEE, Hilton Atlanta Hotel, Atlanta, GA, USA, 15–17 Dec, 2010
Olgac, N., Sipahi, R.: An exact method for the stability analysis of time-delayed linear time-invariant (LTI) systems. IEEE Trans. Autom. Control 47(5), 793–797 (2002)
Sirisena, H.R.: Ripple-free deadbeat control of SISO discrete systems. IEEE Trans. Autom. Control 30(2), 168–170 (1985)
Spurgeon, S.K., Pugh, A.C.: On output deadbeat control of discrete-time multivariable systems. IEEE Trans. Autom. Control 36(7), 894–896 (1991)
Urikura, S., Nagata, A.: Ripple-free deadbeat control for sampled-data systems. IEEE Trans. Autom. Control 32(6), 474–482 (1987)
Wang, Y., Yan, X., Zuo, Z., Zhao, H.: Robust stability and stabilization of discrete time-delay system with time-varying delay and non-linear perturbations. In: 2008 IEEE International Symposium on Intelligent Control Part of 2008 IEEE Multi-conference on Systems and Control, IEEE, San Antonio, Texas, USA, 3–5 Sept, 2008
Xiaofu, J., Jinfeng, G.: Delay-dependent robust H infinity control for uncertain discrete singular linear time-delay systems. In: Proceedings of the 30th Chinese Control Conference, IEEE, Yantai, China, 22–24 July, 2011
Yoneyama, J.: Robust stability and stabilization for uncertain discrete-time fuzzy systems with time-varying delay. In: Proceedings of the 7th Asian Control Conference, IEEE, Hong Kong, China, 27–29 Aug, 2009
Yu, M., Wang, L., Chu, T.: Robust stabilization of discrete-time systems with time-varying delays. In: 2005 American Control Conference, IEEE, Portland, OR, USA, 8–10 June, 2005
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Azar, A.T., Serrano, F.E. (2015). Deadbeat Control for Multivariable Discrete Time Systems with Time Varying Delays. In: Azar, A., Vaidyanathan, S. (eds) Chaos Modeling and Control Systems Design. Studies in Computational Intelligence, vol 581. Springer, Cham. https://doi.org/10.1007/978-3-319-13132-0_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-13132-0_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-13131-3
Online ISBN: 978-3-319-13132-0
eBook Packages: EngineeringEngineering (R0)