
Abstract
Passive Radio Frequency Identification (RFID) network with several reader placed densely and close to each other are susceptible to reader collision problem. In this paper, a novel and efficient RFID reader’s anti-collision protocol is proposed based on Neighbor Friendly Reader Anti-collision (NFRA) mechanism by revising its contention procedure to provide higher throughput in dense reader network. The behavior of the algorithm is evaluated through a set of simulation experiments which demonstrates that the algorithm is 15 % efficient than NFRA. It also has higher fairness as compared to NFRA and other state-of-the-art proposals.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
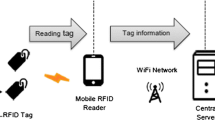
The Radio Frequency Identification (RFID) [1] part of the Automatic Identification and Data Capture (AIDC) group has revolutionized many applications including the industrial environment monitoring. In such time critical environments, reliable and energy efficient monitoring is often required. The RFID tagging and sensing technology is becoming popular in a variety of fields, such as health care [2] warehouse inventories [3], object tracking [4] sports [5], food traceability [6] chain management [7] etc. An RFID network consists of RFID tags/sensor, readers, air interface, and backend servers. The reader communicates with the tags by means of radio signals, in a finite space, known as the interrogation zone. A passive tags have no battery, and they acquire the necessary power from the electromagnetic field of the reader. The basic idea of functioning is backscatter. These tags are cost effective and durable than active battery operated tags, but have a shorter interrogation range and limited processing capabilities. A Dense Reader Environments (DRE) consists of several interrogators closely placed in an area to be monitored using passive tags/sensors. In DRE scenarios, readers collect tags information from time to time by using a reader-to-tag identification protocol like ETSI EN 302 208, ISO/IEC 18000 and EPCglobal Class-1 Gen-2 [8]. EPCglobal is the most widely accepted standard for RFID network in which the information collected by the reader is sent to a central server (CS) by mean of a wired or wireless link using Low Level Reader Protocol (LLRP), whereas for reader to tag communication slotted ALOHA is used. However EPCglobal is not designed to deal explicitly with reader to reader collision problem that is a major issue in DRE which negates the network performance.
The collisions in DRE affect the throughput and efficiency of the system. Three types of collisions can happen in a DRE. Tag to tag collision (TTC) occurs when multiple tags respond simultaneously to same reader. Reader to Tag collision (RTC) occurs when two or more readers try to read the same tag because of an overlap in their read ranges. Reader-to-Reader Collision (RRC) happens when the signal generated by one reader interferes with the reception system of other readers [9]. Figure 22.1 shows a RRC scenario; reader 1 (R1) attempts to read data from tag 1 (T1) and reader 2 (R2) is trying to read data from tags tag 2 (T2) using the same channel. The weak response signal of T1 is degraded because of the strong interference signal of R2.

Reader to reader interference
Numerous approaches have been proposed in the literature to minimize RFID network collisions [9]; however the solutions to this problem are limited. This research work proposes a new anti-collision algorithm for DRE and its operational performance is illustrated using a set of simulation iterations.
The rest of the paper is organized as follows: in Sect. 22.2, related work in the field of DRE anti-collision is discussed. The approaches are classified as distributed and centralized. This section also gives a detailed overview of Neighbor Friendly Reader Anti-collision (NFRA) approach. In Sect. 22.3, the proposed algorithm is described. Section 22.4 evaluates the results of proposed algorithm under different scenarios. Section 22.5 presents a conclusion of this work.
2 Related Work for DRE Anti-collision Management
Implementation of reader to reader anti-collision mechanisms is very important in DRE. Two broad classifications of RRC algorithm are centralized algorithms and distributed algorithms. In distributed schemes every reader communicates directly with its neighbors and do not rely on a centralized device for network resources allocation. The most common distributed technique for RRC, based on carrier sense multiple access (CSMA) or listen before talk (LBT) is Pulse [10]. In Pulse random back off time is introduced, to avoid simultaneous transmission by more than one reader. Pulse protocol has less overhead but when compared with Time division Multiple Access (TDMA) based approaches it lacks in efficiency and throughput. An extension of Pulse protocol is [11] in which Slot Occupied Probability (SOP) is used for reducing the number of collisions. The algorithm effectively mitigates reader collisions in dense reader mode. Distributed tag access with Collision avoidance (DiCa) is another distributed algorithm based on listen before talk and focusing both on RTC and RRC reduction [12]. It is an energy saving system, however readers’ energy consumption has a minor impact on operational cost, and high performance and low complexity are more desirable features in RFID reader networks. Reader Anti-Collision Algorithm for Multichannel Mobile RFID Networks (RAC-Multi) [13] has separate data and control channels for communication. Adjacent channel interference is avoided by introducing even and odd numbered data channels. Distributed Color Scheme (DCS) protocol uses a single frequency for all the readers, with same frame sizes. Time is divided in predetermined identification cycles, which are subdivided into time-slots named as colors [14]. Probabilistic DCS (PDCS) [15] is the extension of this work intended for increasing the low performance of DCS. In PDCS a probability is considered for choosing new colors for collided readers. It reduces the number of collisions and also the number of readers that change color with time. Colorwave [14] is proposed with the aim of improving the low performance of DCS. In this approach each identification cycle has a variable number of colors and the number of colors per cycle increases when RRC are extremely high. Colorwave performs better than ALOHA algorithms in less dense networks and slightly worse in highly loaded networks. Expowave [16] is also a novel approach that outperforms Colorwave and DCS.
In centralized RRC mechanism, server is the acting agent for all communications. All readers are connected to a server that stores both the communications and the readers information. Among the most notable, and high performance centralized RRC avoidance algorithms is Neighbor Friendly Reader Anti-collision (NFRA) [17]. An extension of NFRA with emphasis on high fairness and less RRC is proposed in [18], but the protocol is not compatible with EPCglobal Class-1 Gen-2, and its implementation in real world requires the use of extra wireless network at 433 MHz. Hierarchical Qlearning algorithm (HiQ) is intended for finding dynamic solutions to the reader collision problem by mapping collision patterns among readers [19]. The main shortcoming of this approach is that readers have to manage a huge amount of data, also the final result depends on the quality of the neural network training. Resource allocation based on genetic algorithm (RA-GA) [20] is also a FDMA-TDMA technique based on a HiQ algorithm. It uses the SNR constraint of each reader to appropriately assign spectral and temporal resources. However, there is no description given about how it satisfies the requirements of standards and regulations. Distributed adaptive power control (DAPC) [21] is a novel solution which used a back off algorithm to improve coverage. Distributed color no cooperative selection (DCNS) is a high throughput solutions for static RFID networks [22]. It uses the killer configuration and dynamic priority management for improving the performance of RFID readers as compare to other state of the art reader to reader anti-collision protocols. Distributed color no cooperative selection (DCNS) protocol is based on Colorwave [23], with additive killer configuration. It reduces the unused time slots to increase throughput of the network. It does not require any prior deployment knowledge, and it is appropriate for low cost RFID readers. It has reduced channel control overhead compare to Colorware by employing a new color update mechanism. DCNS provides 16 percent higher throughput than NFRA. Geometric distribution reader anti-collision (GDRA) [24] is a new centralized scheduler which exploits the Sift geometric probability distribution function to minimize reader collision problems.
The results presented in literature shows that centralized algorithms are more efficient in term of throughput as compared to distributed techniques. The work proposed in this paper is based on NFRA [17] in which a polling server is designated to divides the time into identification rounds. Every round begins by an arrangement command AC (random numbers from 1 to maximum number, MN) broadcasted to all the readers. The readers that receive the AC, generate its own random number. The server then issues an ordering command (OC); the readers then compare their random numbers with the value in the OC. If both values are same, the readers broadcasts their beacons signals to determine whether a collision occurs or not. If a readers does not detect any collisions, it send overriding frame (OF) to the neighboring readers. The OF prevents the neighboring readers from receiving the next OC from the server. The neighboring readers which do not identify the next OC due to the OF or which detect a collision of beacons do not actively operate. Communications between a Reader and Tags (CRT) is performed by successful readers only. The throughput of NFRA is affected by the random selection of MN. In many situations a collision detected at the beginning of the round could no longer be valid at the end. Next section describes the details of proposed algorithm based on modified NFRA contention phase.
3 Proposed NFRA-C Algorithm
This Section illustrates the proposed RRC avoidance algorithm. This anti-collision algorithm extends NFRA, using counters, in dense reader networks. Each reader maintains the history of his successful communication with tags in the form of counters. The counter is incremented one time for each successful communication. Counters are exchanged along with beacons to detect the presence of other readers within the range. Algorithm 1 describes the pseudo code of the proposed mechanism. Whenever a collision of beacons is detected, counter of both colliding readers are compared and the reader with a lower value of counter is permitted to participate in that particular round.
Consider the scenario shown in Fig. 22.2. After a collision is detected between reader 1 and 2, counters are compared and the reader with lower value of counter participates in that round, unlike NFRA which does not permit any reader to communicate with tags until a new AC is received. Each identification round begins by the server broadcasting AC to all the readers. Upon receiving the AC readers generate a random number between 1-MN, and wait for OC from server. As soon as the OC is received each reader compares the OC with its random number and if the generated random number is equal to OC number reader broadcasts beacons to its neighbors confirming its intension to participate in that round. If a single collision of beacon is detected at a reader then counters are compared. If the value of counter broadcasted by the reader is less than the received value; the reader broadcasts an OF to its neighbors and conduct identification of tags during CRT time. Else if multiple collisions at a reader are detected than that reader has to wait until next AC from the server is received.

NFRA network scenario

The proposed algorithm is evaluated using a number of simulation scenarios. The first measurable parameter investigated in the algorithm is system efficiency which depends on the successful queries performed by the readers. It is determined as (22.1)
Until, total number of queries = total number of readers
Throughput measurement is defined as the number of successful reader transmissions per second. The throughput is evaluated by using Eq. (22.2)
The Jain’s fairness index [25] is used to rate the fairness of n readers. It evaluates the fairness of throughput distribution among the readers. The fairness index ranges from 0 (min fair) to 1 (max fair). It is given in Eq. (22.3)
where x i is the throughput of the ith reader, and n is the quantity of readers.
4 Results and Performance Evaluation
The proposed algorithm is analyzed and compared with the state-of-the-art anti-collision protocols using various performance evaluation scenarios. OMNET++ is used to evaluate the performance of 100 readers, placed in a grid of 500 × 500 m. Efficiency of proposed algorithm is demonstrated in Fig. 22.3, with different values of MN, i.e. 16, 32 and 64. The performance with MN = 32 is highest. With MN = 64, delay becomes huge hence a lower efficiency is achieved. The performance of MN = 64 got better when number of readers were increased from 100.

Efficiency of NFRA-C with MN = 16, 32, 64
NFRA-C shows higher percentage efficiency than NFRA and other state of the art anti-collision protocols as shown in Fig. 22.4. For 100 readers it has a 15 % increased efficiency as compare to NFRA, 21 % increased efficiency as compare to PULSE and 43 % increased efficiency as compare to Colorware. The collision rate for different RRC mechanism are compared in Fig. 22.5.

Efficiency comparison of NFRA-C with MN = 16

Collision Rate comparison of NFRA-C
NFRA-C achieved a maximum fairness value for number of readers >75, also providing a significant increase in throughput among readers. In Pulse the performance of readers is dramatically reduced by two neighbors that take turns with each other at querying tags. In Colorwave, each reader varies the number of colors used in each round; hence there is a significant difference of the frequency used by the readers to query tags, resulting in a severe impact on fairness. The fairness of NFRA is affected by the random number and no history maintenance of successful rounds as shown in Fig. 22.6.

Fairness comparison of NFRA-C
5 Conclusion
NFRA-C is a novel reader to reader anti-collision approach that provides high throughput and fairness in dense RFID reader environment. Among the existing protocols, NFRA achieves higher network throughput however, its performance is dependent on number of neighbors and probability of collision. The proposed NFRA-C ensures high throughput and better fairness by introducing counters in the contention process. Readers that have not participated in tags identification process for a long time gets a higher priority. NFRA-C has been compared with NFRA, Colorware, PULSE and Expoware by analyzing collisions, efficiency, and fairness. The analysis shows that counters maintained by each reader helps in increasing the performance and fairness of the network, and providing a throughput better than state of the art DRE anti-collision approaches. The fairness reaches to a value of 1(maximum) for number of readers >75 showing that all readers receive almost same allocation and the efficiency is 15% increased as compare to NFRA.
References
López, T.S.: RFID and sensor integration standards: State and future prospects. Comput. Stand. Interfaces 33(3), 207–213 (2011)
Chena, Y.Y., Tsaib, M.L.: An RFID solution for enhancing inpatient medication safety with real-time verifiable grouping-proof. Int. J. Med. Inform. 83(1), 70–81 (2014)
Vitaz, J., Buerkle, A., Sallin, M., Sarabandi, K.: Enhanced detection of on-metal retro-reflective tags in cluttered environments using a polarimetric technique. IEEE Trans. Antennas Propag. 60(8), 3727–3735 (2012)
Geng, L., Bugallo, M., Athalye, A., Djuric, P.: Indoor tracking with RFID systems. IEEE J. Sel. Top. Signal Process. 8(1), 96–105 (2014)
Bialkowski, A., Lucey, P., Carr, P., Denman, S. Matthews, I., Sridharan, S.: Recognising team activities from noisy data. In: IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW) (2013)
Exposito, I., Gay-Fernandez, J.A., Cuinas, I.: A complete traceability system for a wine supply chain using radio-frequency identification and wireless sensor networks [wireless corner]. IEEE Antennas Propag. Mag. 55(2), 255–267 (2013)
Chena, J.C., Chengb, C.-H., Huangb, P.B.: Supply chain management with lean production and RFID application: a case study. Expert Syst. Appl. 40(9), 3389–3397 (2013)
EPC Radio-Frequency Identity Protocols Class-1 Generation-2 UHF RFID Protocol for Communications at 860 MHz–960 MHz, Jan 2005
Nawaz, F., Jeoti, V., Awang, A., Drieberg, M.: Reader to reader anticollision protocols in dense and passive RFID environment. In: 11 IEEE Malaysian International Conference on Communication, Kuala Lumpur, Malaysia, Nov 2013
Birari, S.M., Iyer, S.: Mitigating the reader collision problem in RFID networks with mobile readers. In: Proceedings of the 13th IEEE International Conference on Networks, Nov 2005
Song, I., Hong, S., Chang, K.: An improved reader anti-collision algorithm based on pulse protocol with slot occupied probability in dense reader mode. In: IEEE 69th Vehicular Technology Conference, VTC Spring 2009, April 2009
Kwang-il, H., Kyung-tae, K., Doo-seop, E.: Distributed tag access with collision avoidance among mobile RFID readers. In: International Conference on Computational Science and Engineering, Vancouver, Canada (2009)
Shin, K., Song, Q.: RAC-multi: reader anti-collision algorithm for multichannel mobile RFID networks. Sensors 10, 84–96 (2009)
Waldrop, J., Engels, D.W., Sarma, S.E.: Colorwave: an anticollision algorithm for the reader collision problem. In: IEEE International Conference on Communications (2002)
Gandino, F., Ferrero, R., Montrucchio, B., Rebaudengo, M.: Probabilistic DCS: an RFID reader to reader anti-collision protocol. J. Netw. Comput. Appl. 34(3), 821–832 (2011)
Konstantinou, N.: Expowave: an RFID anti-collision algorithm for dense and lively environments. IEEE Trans. Commun. 60(2), 352–356 (2012)
Eom J.; Yim S.; Lee T.: An efficient reader anti-collision algorithm in dense RFID networks with mobile RFID readers. IEEE Trans. Ind. Electron. 56(7), 2326–2336 (2009)
Ferrero, R., Gandino, F., Motrucchio, B., Rebaudengo, M.: Fair anti-collision protocol in dense RFID networks. In: Third International EURASIP Conference on RFID Technology, Spain (2010)
Ho, J., Engels, D.W., Sarma, S.E.: HiQ: a hierarchical Qlearning algorithm to solve the reader collision problem. In: International Symposium on Application and the Internet Workshops (2006)
Seo, H., Lee, C.: A new GA-based resource allocation scheme for a reader-to-reader interference problem in RFID systems. In: IEEE ICC, Cape Town, South Africa (2010)
Cha, K., Jagannathan, S.: Adaptive power control protocol with hardware implementation for wireless sensor and RFID reader networks. IEEE Syst. J. 1(2), 145,159 (2007)
GandinGandino, F., Ferrero, R., Montrucchio, B., Rebaudengo, M.: DCNS: an adaptable high throughput RFID reader-to-reader anticollision protocol. IEEE Trans. Parallel Distrib. Syst. 24(5), 893–905 (2013)
Waldrop, J., Engels, D., Sarma, S.: Colorwave: an anticollision algorithm for the reader collision problem. In: IEEE International Conference on Communications (2002)
Bueno-Delgado, M.V., Ferrero, R., Gandino, F., Pavon-Marino, P.: A geometric distribution reader anti-collision protocol for RFID dense reader environments. IEEE Trans. Autom. Sci. Eng. 10(2), 296–306 (2013)
Jain, R., Chiu, D., Hawe, W.: A quantitative measure of fairness and discrimination for resource allocation in shared computer systems. Technical Report DEC-TR-301, Digital Equipment Corporation, Maynard, Mass, USA (1984)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Nawaz, F., Jeoti, V. (2015). A Novel Anti-collision Protocol for Optimization of Remote Sensing in Dense Reader Network. In: Sulaiman, H., Othman, M., Othman, M., Rahim, Y., Pee, N. (eds) Advanced Computer and Communication Engineering Technology. Lecture Notes in Electrical Engineering, vol 315. Springer, Cham. https://doi.org/10.1007/978-3-319-07674-4_22
Download citation
DOI: https://doi.org/10.1007/978-3-319-07674-4_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-07673-7
Online ISBN: 978-3-319-07674-4
eBook Packages: EngineeringEngineering (R0)