
Abstract
Barbour’s formulation of Mach’s principle requires a theory of gravity to implement local relativity of clocks, local relativity of rods and spatial covariance. It turns out that relativity of clocks and rods are mutually exclusive. General Relativity implements local relativity of clocks and spatial covariance, but not local relativity of rods. It is the purpose of this contribution to show how Shape Dynamics, a theory that is locally equivalent to General Relativity, implements local relativity of rods and spatial covariance and how a BRST formulation, which I call Doubly General Relativity, implements all of Barbour’s principles.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
A reflection on Mach’s principle lead Barbour to postulate that rods and spatial frames of reference should be locally determined by a procedure that he calls “best matching,” while clocks should be locally determined by what he calls “objective change”. (For more, see [1].) More concretely, Barbour’s principles postulate local time reparametrization invariance, local spatial conformal invariance and spatial covariance. The best matching algorithm for spatial covariance and local spatial conformal invariance turns out to be equivalent to the imposition of linear diffeomorphism and conformal constraints
where we use a compact Cauchy surface \(\varSigma \) without boundary with Riemannian metric \(g_{ab}\) and metric momentum density \(\pi ^{ab}\) with trace \(\pi \). The vector field \(\xi \) and the scalar field \(\rho \) are Lagrange multipliers. A more involved procedure, which I will not explain here, leads to the implementation of local time reparametrization invariance through quadratic Hamilton constraints
where \(F_{abcd}(x)\) and \(V(x)\) are constructed from \(g_{ab}(x)\) and its derivatives at \(x\) and \(N\) denotes a Lagrange multiplier. There is no reason for \(\hat{S}\) to have homogeneous conformal weight, so a system containing the constraints \(\hat{S}(N)\) and \(C(\rho )\) will not be first class except for very special choices of \(F_{abcd},V\). This means that time reparametrization symmetry and spatial conformal symmetry generically exclude one another. An interesting situation occurs when we choose the \(F_{abcd},V\) to reproduce the Hamilton constraints of General Relativity
where the constraint system \(S(N),Q(\rho )\) is completely second class, while the constraint system \(S(N),H(\xi )\) is first class as is the constraint system \(Q(\rho ),H(\xi )\). We will shortly see that this is the reason, why a Shape Dynamics and Doubly General Relativity can be constructed [2].
2 Symmetry Trading
Gauge theories describe a physical system using redundant degrees of freedom. The physical degrees of freedom are identified with orbits of the action of the gauge group. This redundant description is very useful in field theory, because it is often the only local description of a given system. The canonical description of gauge theories (see e.g. [3]) is provided by a regular irreducible set of first class constraints \(\{\chi _\alpha \}_{\alpha \in \fancyscript{A}}\), whose elements \(\chi _\alpha \) are smooth functions on a phase space \(\varGamma \) with Poisson bracket \(\{.,.\}\). First class means that the constraint surface \(\fancyscript{C}=\{x\in \varGamma :\chi _\alpha (x)=0,\,\forall \alpha \in \fancyscript{A}\}\) is foliated into gauge orbits, whose infinitesimal generators are the Hamilton vector fields \(v_\alpha :f\mapsto \{\chi _\alpha ,f\}\). For simplicity we will assume that the system is generally covariant, so it has vanishing on-shell Hamiltonian. Observables \([O]\) of the system are equivalence classes of smooth gauge-invariant functions \(O\) on \(\varGamma \), where two functions are equivalent if they coincide on \(\fancyscript{C}\) and where gauge invariance means that \(O\) is constant along gauge orbits. This means that an observable is completely determined by determining its dependence on a reduced phase space \(\varGamma _{red}\), which contains one and only one point out of each gauge orbit. There is no unique choice of \(\varGamma _{red}\) and the simplest description is through a regular irreducible set of gauge fixing conditions \(\{\sigma ^\alpha \}_{\alpha \in \fancyscript{A}}\), such that a proper reduced phase is defined through \(\varGamma _{red}=\{x\in \varGamma :\chi _\alpha (x)=0=\sigma ^\alpha (x),\,\forall \alpha \in \fancyscript{A}\}\). The observable algebra can then be identified with the Dirac algebra on reduced phase space, where the Dirac bracket takes the form
where \(M\) denotes the inverse of the linear operator \(\{\chi ,\sigma \}\).
The condition that \(\varGamma _{red}\) contains one and only one point out of each gauge orbit poses important restrictions on the gauge fixing conditions, but the set of gauge fixing conditions is not required to be first class. A very interesting situation arises when the set of gauge fixing condition is itself first class: In this case one can switch the role of gauge fixing conditions and constraints and describe the same observable algebra, and thus the same physical system, with the gauge theory \(A=(\varGamma ,\{.,.\},\{\chi _\alpha \}_{\alpha \in \fancyscript{A}})\) or with the gauge theory \(B=(\varGamma ,\{.,.\},\{\sigma ^\alpha \}_{\alpha \in \fancyscript{A}})\). The manifest equivalence of the two theories is established by gauge fixing theory \(A\) with the gauge fixing set \(\{\sigma ^\alpha \}_{\alpha \in \fancyscript{A}}\) and gauge theory \(B\) with the gauge fixing set \(\{\chi _\alpha \}_{\alpha \in \fancyscript{A}}\). One thus trades one gauge symmetry for another.

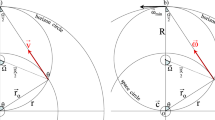
Construction of equivalent gauge theories from a linking theory
A very useful tool for the construction of equivalent gauge theories is a linking theory, see [4] and Fig. 1. Let us start with a phase space extension and denote the configuration variables of the extension by \(\phi _\alpha \) and their canonically conjugate momenta by \(\pi ^\beta \) and local Darboux coordinates on the original phase space \(\varGamma \) by \((q_i,p^j)\). A linking theory on extended phase space is a set of regular irreducible first class constraints that can be split into three subsets: The set \(\{\chi ^1_\alpha \}_{\alpha \in \fancyscript{A}}\) can be weaklyFootnote 1 solved for \(\phi _\alpha \), the set \(\{\chi ^\alpha _2\}_{\alpha \in \fancyscript{A}}\) can be weakly solved for \(\pi ^\alpha \) and the set \(\{\chi ^3_\mu \}_{\mu \in \fancyscript{M}}\) is weakly independent of the phase space extension. In this case, we can simplify the discussion by noticing that the three constraint sets are equivalent to the sets
There are two sets of natural gauge fixing conditions \(\{\phi _\alpha \}_{\alpha \in \fancyscript{A}}\) and \(\{\pi ^\alpha \}_{\alpha \in \fancyscript{A}}\). Imposing \(\phi _\alpha =0\) gauge fixes the constraints \(\pi ^\alpha -\pi ^o_\alpha (q,p)\) and leads to the phase space reduction \((\phi _\alpha ,\pi ^\beta ) \rightarrow (0,\pi ^o_\beta (q,p))\), so the reduced phase space is \(\varGamma \). Moreover, the Dirac bracket associated with this phase space reduction coincides with the Poisson bracket on \(\varGamma \). The result of the phase space reduction is the gauge theory \(B=(\varGamma ,\{.,.\},\{\pi ^o_\alpha \}_{\alpha \in \fancyscript{A}}\cup \{\tilde{\chi }^3_\mu \}_{\mu \in \fancyscript{M}})\).
Similarly, imposing \(\pi ^\alpha =0\) yields a phase space reduction \((\phi _\alpha ,\pi ^\beta )\rightarrow (\phi _o^\alpha (q,p),0)\) and the resulting gauge theory is \(A=(\varGamma ,\{.,.\},\{\phi ^o_\alpha \}_{\alpha \in \fancyscript{A}}\cup \{\tilde{\chi }^3_\mu \}_{\mu \in \fancyscript{M}})\). The gauge theories \(A\) and \(B\) describe obviously the same physical system. It turns out that we would have obtained the same result even if had we not solved the first two subsets of constraints for the phase space extension.
3 Shape Dynamics
Let us now extend the phase space of General Relativity by a conformal factor \(\phi \) and its conjugate momentum density \(\pi _\phi \). The linking theory between General Relativity on a compact manifold \(\varSigma \) without boundary and Shape Dynamics can be obtained by canonical best matching General Relativity in the ADM formulation with respect to conformal transformations that do not change the total spatial volume. This yields the following set of constraints
where \(\hat{\phi }:=\phi -\frac{1}{6} \ln \langle e^{6\phi }\rangle \), \(\sigma ^a_b=\pi ^{ac}g_{cb}-\frac{1}{3} \pi \delta ^a_b\) and where triangle brackets denote the mean w.r.t. \(\sqrt{|g|}\) and where the term \(a\) vanishes when \(\pi =\langle \pi \rangle \sqrt{|g|}\). Imposing the gauge fixing condition \(\phi =0\) results in a phase space reduction \((\phi ,\pi _\phi )\rightarrow (0,4(\pi -\langle \pi \rangle ))\) and reduces the system back to the ADM formulation of General Relativity. Imposing the gauge fixing condition \(\pi _\phi =0\) gauge fixes all \(TS(N)\), except for one. The simplest way to see this is to observe that \(TS=0\) is equivalent to imposing that \(\phi \) solves the Lichnerowicz-York equation
for \(\varOmega =e^\phi \), but with the reducibility condition that the conformal factor is volume preserving \(\int _\varSigma d^3x \sqrt{|g|}\left( 1-e^{6\phi }\right) =0\). The left-over constraint is thus equivalent to the constraint
where \(\phi _o[g,p;x)\) denotes the positive solution to the Lichnerowicz-York equation, which is known to uniquely exist on physical phase space [5]. The phase space reduction thus yields the constraint system
This is not exactly Shape Dynamics, because the total conformal transformations generated by \(\hat{C}(\rho )\) preserve the total spatial volume. One can however obtain a true theory of Shape Dynamics by observing that the only nonlinear constraint \(H_{SD}\) has the form of a reparametrization constraint \(p_t-H(t)\approx 0\) of parametrized dynamics. Thus, after identifying the total volume \(V\) with the momentum conjugate to York time \(\tau =\frac{3}{2}\langle \pi \rangle \) and deparametrizing the theory one obtains the physical Hamiltonian
The \(\pi (x)\) is constrained to \(\langle \pi \rangle \sqrt{|g|(x)}\) and the conformal factor of the metric is pure gauge, except for the total volume. The physical phase space is thus coordinatized by the conformal metric \(\rho _{ab}=|g|^{-1/3}g_{ab}\) and \(\sigma ^a_b\) and \(V,\langle \pi \rangle \). The only physical phase space coordinate that is affected differently by volume preserving conformal transformations as opposed to unrestricted conformal transformations is \(V\). But after reinterpreting \(\frac{3}{2} \langle \pi \rangle ,V\) as time and its momentum there is no difference on the physical phase space volume preserving and unrestricted conformal transformations. The Shape Dynamics Hamiltonian \(H_{phys}\) comes with the constraints
The dictionary between Shape Dynamics and General Relativity is established as follows: Given a solution \(\rho _{ab}(\tau ),\sigma ^a_b(\tau )\) to the Shape Dynamics equations of motion, one finds that this is also a solution to the equations of motion of General Relativity in constant mean curvature (CMC) gauge.
4 Doubly General Relativity
An important difficulty of Shape Dynamics is that the physical Hamiltonian is non-local. One can improve this by working with the BRST formalism. One obtains the BRST formalism by adjoining to each of the regular irreducible first class constraints \(\chi _\alpha \) a ghost \(\eta ^\alpha \) and canonically conjugate ghost momentum \(P_\alpha \) with opposite statistics. A result from cohomological perturbation theory then shows that the first class property of the constraints allows one to construct a nilpotent ghost number one BRST generator \(\varOmega =\eta ^\alpha \chi _\alpha +\fancyscript{O}(\eta ^2)\), which provides a resolution of the observable algebra. This means that \(\{\varOmega ,.\}\) is a differential, whose cohomology at ghost number zero is precisely the classical observable algebra.
The prerequisite for symmetry doubling to work was that there were two first class surfaces that gauge fixed one another. One can thus construct two nilpotent BRST generators: A ghost number \(+1\) generator \(\varOmega \) form the first set of first class constraints and a ghost number \(-1\) generator \(\varPsi \) from the second set of first class constraints. For generally covariant theories, i.e. theories with vanishing on-shell Hamiltonian, one finds that the BRST-gauge fixed Hamiltonian can be written as \(H_{BRST}=\{\varOmega ,\varPsi \}\). The Jacobi identity and nilpotency of the generators then implies that \(H_{BRST}\) is annihilated by two BRST transformations: the ones generated by \(\varOmega \) and the ones generated by \(\varPsi \). One can thus not only relate the observables of the two theories with one another (\(\varOmega \) provides a resolution for the first and \(\varPsi \) for the second), but one sees that the BRST gauge-fixed actions of the two theories can be chosen to coincide.
It goes beyond the scope of this contribution to discuss a detailed application of this construction for the duality between General Relativity and Shape Dynamics (for details see [6]), so I will only illustrate what the two BRST charges can be chosen to be:
where the higher orders in ghosts are chosen such that the two generators are nilpotent. It is evident that the construction will lead to a canonical action that is left invariant invariant by ADM- and Shape Dynamics BRST transformations, hence the name Doubly General Relativity. I conclude this short description with the warning that the ghost-number zero term of this Hamiltonian is not the CMC gauge-fixing of ADM.
5 Interpretation
Although local relativity of clocks and local relativity of rods seem to be incompatible as gauge symmetries, they are reconcilable. This reconciliation can be seen in the canonical formalism, where it appears that gravitational dynamics is equivalently described either by the ADM system or by the Shape Dynamics system. This means that both theories have the same solutions and make the same predictions for all observables. It can also be seen in the BRST formalism, where not only the predictions for observables coincide, but where it turns out that the gauge fixed gravity action has two BRST invariances, one corresponding to the on-shell spacetime symmetries of the ADM description of gravity, the other corresponding to the conformal symmetries of the Shape Dynamics description of gravity.
I want to conclude with considering the ideas behind the construction of Shape Dynamics. The construction of Shape Dynamics requires two steps: symmetry trading and the identification of a parametrized dynamical system. There is a lot of literature on the second step (e.g. Kuchař’s perennials), but the idea behind symmetry trading seems to have avoided extensive discussion, although the idea itself is obvious.
Gauge theories are formulated with redundant degrees of freedom and gauge invariance, to have a localFootnote 2 (and thus comprehensible) field theory. This is a special instance of the more general fact that a comprehensible description of the real world often requires auxiliary concepts, which are not really part of reality. Which auxiliary concept is chosen is not unique; in general there is an infinite number of internally consistent descriptions. But although all descriptions are required to accurately describe the real world and be internally consistent, it can happen that two descriptions are mutually exclusive because the auxiliary concepts are incompatible. We see this in the duality between General Relativity and Shape Dynamics: General Relativity teaches that gravity is spacetime geometry and not a conformal theory, while Shape Dynamics teaches that gravity is a conformal theory without spacetime.
This can be very disturbing and leads to the question: “How can we discriminate better from worse descriptions?” I can only think of one criterion, provided two descriptions are accurate and internally consistent. The criterion is: Which description has more explanatory power? However, this may be the wrong question. I think one should rather embrace the fact there are many possibly equally good consistent but mutually exclusive descriptions of the real world and one should use whichever is most adapted to answer a particular problem. For example, a question regarding spacetime has most likely a simple answer in a covariant description, while a question regarding the observable algebra has most likely a simple answer in the Shape Dynamics description.
Notes
- 1.
“Weakly” means on the constraint surface.
- 2.
Note that the Shape Dynamics Hamiltonian, although nonlocal, can be described locally through the linking theory.
References
Barbour, J.: Shape dynamics: an introduction. In: Finster, F., Müller, O., Nardmann, M., Tolksdorf, J., Zeidler, E. (eds.) Quantum Field Theory and Gravity: Conceptual and Mathematical Advances in the Search for a Unified Framework, pp. 257–298. Basel, Birkhäuser (2012)
Gomes, H., Gryb, S., Koslowski, T.: Einstein gravity as a 3D conformally invariant theory. Class. Quantum Grav. 28, 045005 (2011). doi:10.1088/0264-9381/28/4/045005
Henneaux, M., Teitelboim, C.: Quantization of Gauge Systems. Princeton University Press, Princeton, NJ (1992)
Gomes, H., Koslowski, T.: The link between general relativity and shape dynamics. Class. Quantum Grav. 29, 075009 (2012). doi:10.1088/0264-9381/29/7/075009
Ó Murchadha, N., York, J.: Existence and uniqueness of solutions of the Hamiltonian constraint of general relativity on compact manifolds. J. Math. Phys. 14, 1551 (1973). doi:10.1063/1.1666225
Gomes, H., Koslowski, T.: Symmetry Doubling: Doubly General Relativity. ArXiv e-prints arXiv:1206.4823 [gr-qc] (2012)
Acknowledgments
Research at the Perimeter Institute is supported in part by the Government of Canada through NSERC and by the Province of Ontario through MEDT.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
Koslowski, T.A. (2014). Shape Dynamics. In: Bičák, J., Ledvinka, T. (eds) Relativity and Gravitation. Springer Proceedings in Physics, vol 157. Springer, Cham. https://doi.org/10.1007/978-3-319-06761-2_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-06761-2_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-06760-5
Online ISBN: 978-3-319-06761-2
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)