
Abstract
This chapter introduces the TRB 2013 Workshop on Road Vehicle Automation, which was the original source for the papers that are included in this volume. The TRB organization and its functions are explained, providing the context for this workshop and its significance. The reasons for creating the workshop are explained, in the context of the history of road vehicle automation work in the U.S. The structure and organization of the meeting are explained, showing its mixture of plenary talks, breakout discussions, technical demonstrations and ancillary meetings. The chapter concludes with a discussion of future directions and thoughts about the future meetings in this series.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Intelligent Transportation System
- Automate Driving
- Transportation Research Record
- Standing Committee
- Vehicle Automation
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
The Transportation Research Board (TRB) of the National Academies organized the Second Annual Workshop on Road Vehicle Automation, which was hosted by Stanford University on July 15–19, 2013. The workshop website, vehicleautomation.org, evidences the scale of this event. More than 60 people planned over 100 h of programming, much of it interactive, for 335 participants from 15 countries. Interest was so high that registration had to be closed nearly a month before the workshop due to capacity constraints.
Part of this interest was derived from the success of TRB’s First Annual Workshop on Road Vehicle Automation, which was held at the Beckman Center of the National Academies at the University of California, Irvine, on July 24–26, 2012, and part was based on the growing interest in road vehicle automation both within and beyond the transportation profession. The 2012 Irvine workshop was organized to educate the transportation community about the recent progress in road vehicle automation, especially the activities outside the U.S., which were largely unknown to most of the U.S. participants, and to stimulate interest in new research on this subject in the U.S.
Although the U.S. DOT had sponsored a large and active program on road vehicle automation during the 1990s, it was terminated in 1998 and the topic was not given serious consideration by transportation agencies and professionals in the subsequent years. The level of public research activity dwindled to near zero in the U.S., but research on the subject picked up in Europe and Japan in the early 2010s. The Irvine workshop was an opportunity for U.S. stakeholders to learn about that work, as well as the new activities in the U.S. that arose from the DARPA Grand Challenge, DARPA Urban Challenge, and Google’s announcement of their “self-driving cars”. The response to the Irvine workshop by its 125 participants was very favorable, but that workshop did not make as much progress as hoped for on identifying the research that needs to be done to advance automation closer to deployment. This, plus the high level of organizer, presenter, and participant interest in another workshop, motivated the creation of the second workshop in 2013.
The 2013 workshop at Stanford focused on the challenges and opportunities for road vehicle automation. The goals were to enhance understanding of the current state of knowledge and to produce specific research needs statements that could become the seeds of new research projects. The workshop was organized by scores of volunteers representing multiple standing committees of TRB. It was important to have active participation from committees with widely varying backgrounds because of the multidisciplinary character of the topic.
The Center for Internet and Society (CIS) at Stanford Law School and the Center for Automotive Research at Stanford (CARS) hosted the workshop through their Legal Aspects of Automated Driving Program. This multidisciplinary initiative, led by Bryant Walker Smith, explores the legal, policy, and social aspects of increasing vehicle automation.
The 2013 plenary talks were organized more thematically to emphasize a wide range of issues that have to be considered before more advanced road vehicle automation can become a reality. (In contrast, the 2012 plenary presentations were organized along project lines to make people aware of the range of active projects.) These plenary talks were linked to breakout sessions focused on identifying specific research needs in ten distinct thematic topic areas.
These breakout sessions, which formed the “working” part of the workshop, followed a wide range of structures: Some set up as mini-conferences with multiple presenters, others as highly interactive workshop sessions for discussion of research needs, and others as conference/workshop hybrids. On the final morning of the main meeting, representatives of each breakout session presented their recommendations to the full plenary session.
An element that added considerable excitement to the meeting was the availability of vehicle demonstrations. Google and Bosch gave rides on a nearby freeway in their automated research vehicles, Autonomous Stuff demonstrated the capabilities of a variety of sensors that they retrofitted onto a rental car, and Stanford’s automotive researchers hosted an open house to display and discuss their research systems.
At the end of the conference, the attendees expressed overwhelmingly favorable interest in a follow-up meeting the next year, so TRB will continue to organize these annual workshops. The breakout discussions also yielded 46 research needs statements, which are being reviewed by the TRB standing committees for inclusion in TRB’s official database of research needs.
2 TRB Background and Significance
Although TRB has some resemblance to professional societies that organize conferences and publish technical journals of research results, it is quite different in several ways from most professional societies. TRB is one of six major divisions of the National Research Council—a private, nonprofit institution that is the principal operating agency of the National Academies (National Academy of Sciences, National Academy of Engineering, and the Institute of Medicine). Its work cuts across many different professional disciplines and all modes of transportation, which makes it significantly different from societies that are discipline-oriented or modally-focused. It is supported by state transportation departments, federal agencies including the component administrations of the U.S. Department of Transportation, and other organizations and individuals interested in the development of transportation.
TRB was established in 1920 as the National Advisory Board on Highway Research to provide a mechanism for the exchange of information and research results about highway technology. Renamed the Highway Research Board (HRB) in 1925, the organization accomplished its mission through standing committees, publications, and an annual meeting. In the decades that followed, HRB steadily increased in size. Information exchange remained its sole mission until the 1950s, when it began to undertake management of ad hoc research projects. During the 1960s, the Board’s activities became increasingly multimodal in outlook, so in 1974 it became the Transportation Research Board.
Since the early 1980s TRB’s Studies and Special Programs Division has been conducting studies of national transportation policy issues, making formal policy recommendations to government agencies using a carefully managed process designed to produce authoritative and unbiased policy advice. For many years, TRB has also been managing cooperative research programs that are co-sponsored by the U.S. DOT and state departments of transportation, as well as special research programs mandated by the U.S. Congress.
The Technical Activities Division of TRB functions most like a traditional professional society, organizing conferences and publishing peer-reviewed technical papers in its Transportation Research Record series. This Division contains more than 200 standing committees that focus on a wide range of transportation topics, covering not only road vehicle transportation, but also pedestrian and bicycle transportation, aviation, marine, rail, and pipelines. These committees are organized in the following broad topic clusters:
-
Design and construction (pavements, structures, materials, traditional civil engineering)
-
Operations and preservation (traffic management, maintenance, security, and including the committees specifically devoted to intelligent transportation systems and vehicle-highway automation)
-
Planning and environment (including energy, environment, economics, forecasting and societal issues)
-
Policy and organization (including transportation finance, law, education and training, and data management)
-
Safety, system components and users (including human factors and mode-specific committees in transit and non-road-oriented modes).
The standing committees are a critical resource to the transportation community. Their formal responsibilities include organizing meeting sessions, reviewing papers for publication or presentation, and formulating the research needs statements posted on TRB’s website. The principal event for TRB—and for the entire transportation research and policy community—is the Annual Meeting, which attracts more than 12,000 attendees to Washington, DC each January. The 2014 Annual Meeting featured 450 lectern sessions, 195 poster sessions and 135 workshops, and it required committee peer review of some 5,200 papers. The committees select the best of these papers (22 % in 2014) for publication in the Transportation Research Record, the Journal of the Transportation Research Board.
The 2013 Workshop on Road Vehicle Automation was organized as the mid-year meeting of the standing committees on Vehicle-Highway Automation and Intelligent Transportation Systems, with cooperation and co-sponsorship from the committees on:
-
Emerging Technology Law
-
Major Activity Center Circulation Systems
-
Emerging and Innovative Public Transportation and Technologies
-
Vehicle User Characteristics
-
Cyber Security
-
Transportation Energy.
This shows the breadth of the topics that were covered and of the expertise that was assembled for the meeting.
The TRB Committee on Intelligent Transportation Systems, currently chaired by Jane Lappin, is concerned with ITS systems-level issues. Such issues include conceptual system planning and design, integration of information and communications technologies throughout the transportation network, facilitation of intermodal integration, and evaluation of the overall impacts of ITS on the developers, operators, and users of all parts of the ground transportation system. Activities focus on the broad planning, policy, economic, social, technological, and institutional aspects of the development and implementation of ITS. The Committee also facilitates coordination of ITS-related issues with other standing committees of TRB. It was established in 1992, as a spin-off from the Committee on New Transportation Systems and Technologies, when it was becoming evident that ITS would be an important new development in transportation.
The TRB Committee on Vehicle-Highway Automation, currently chaired by Steven Shladover, is concerned with the development, application, and operation of driver assistance and automated control to the vehicle and highway system. The scope includes all forms and levels of control ranging from driver assistance systems operating on existing streets and highways to full vehicle control systems operating on freeway type and/or dedicated lane facilities. It further includes systems that support specialized highway related functions including maintenance, fleet operations, and similar applications. The emphasis is on control systems that will enhance user safety, system efficiency, and operational performance while providing for increased convenience and trip quality to the highway user. The objectives of the committee are to provide a focus and forum within the TRB for vehicle-highway automation and to promote a better understanding within the transportation profession of these systems including their research, deployment, and operation. It was established in 1997 as a spin-off from the Committee on ITS, as the Committee on Automated Highway Systems, when the U.S. DOT was sponsoring the National Automated Highway Systems Consortium program and automated highways were expected to become the major new thrust in road transportation. When the Automated Highway System program was terminated, the Committee was re-named and its scope was adjusted to reflect more modest ambitions.
The TRB Joint Subcommittee on Challenges and Opportunities for Road Vehicle Automation (CORVA), currently chaired by Robert Denaro, was established as a subcommittee of the Committees on ITS and Vehicle-Highway Automation to provide a venue to bring together all the TRB standing committees having interests related to road vehicle automation so that they can participate in organizing meetings and other activities. The mission of CORVA is to identify, stimulate and disseminate research essential to the successful development and deployment of automated cars, trucks and transit vehicles operating on the road network and its associated infrastructure. CORVA is a forum for information exchange and definition of research needs across planning, policy, economic, social, technological, and institutional issues related to road vehicle automation. Through its meetings, conferences and workshops, CORVA attempts to maximize inclusion of the diverse organizational interest in road vehicle automation, creating dynamic interaction among government, academic and industrial leaders in the development of vehicle automation technology and products.
The TRB Emerging Technology Law Committee, currently chaired by Bryant Walker Smith, addresses both the legal implications of new transportation technologies and the practical implications of new legal technologies. It is highlighted here because it focuses at present on vehicle automation and connectivity, because its members were the principal organizers of three breakout sessions in the first two workshops, and because its chair invited TRB to Stanford.
3 Need for this Workshop in the Context of the History of Road Vehicle Automation Research
The 2013 Workshop on Road Vehicle Automation was important and timely for several reasons:
-
Professionals in transportation and related fields have become increasingly interested in understanding road vehicle automation and what it means for them as managers, designers, facility operators, regulators, policymakers, lawyers, and planners, to name just a few. There have not been any sources of authoritative information to address these needs, and the large majority of the information that has been circulated in public is from sources that are less directly involved in the operating realities of the transportation world. This has led to a high level of uncertainty and anxiety about what automation portends for the future of the road transportation system.
-
The information available from the general interest media, the trade press and the Internet has tended toward unrealistically optimistic views about the technical maturity of automation, the timing for its introduction, and its impacts. By its nature, the published work from these sources is not subjected to rigorous peer review processes, and is therefore largely unfiltered for accuracy and technical correctness. There was a need for discussion about what is achievable technically and economically, and on what timeline.
-
There had not yet been a forum to bring together the diverse stakeholders who are interested in and likely to be affected by automation so that they can interact with and learn from each other. This requires people with expertise in vehicle, infrastructure, and information technology as well as legal, policy, human factors, business, and institutional issues. It also requires people who bring the different perspectives of private industry, government at all levels, academics, and consultants, representing both U.S. and international experiences.
-
The state of the art is changing rapidly as more companies and research institutions get involved, so there is a need for frequent updates about what people have been learning. The first TRB workshop in 2012 provided an overview of the progress in the decade that immediately preceded it, but more updates were needed on the activities of the intervening year. As more people get involved in the topic, there is also a need to get them up the learning curve since many of them did not participate in the 2012 meeting.
-
In the popular and trade press and throughout the Internet there has been a blurring of the distinction between full automation of vehicles in all road environments, and the partial automation that is emerging today with driver-monitored parking, traffic jam assist and adaptive cruise control systems. Experts agree that much more research and technology development work will be needed before the public can gain the benefits of fully automated driving. There has been a need for serious, in-depth discussion about the unknowns and the work that remains to be done to resolve them, so that both public and private sector organizations can invest their resources efficiently to address the important challenges that remain.
People who are getting involved with road vehicle automation for the first time now are not aware of the long history of prior efforts in this direction. There is a tendency for many to believe that road vehicle automation began with the DARPA Challenges of the mid-2000s, or maybe by the Google “self-driving” car activities that were inspired by the DARPA activities. In fact, these recent activities are only the most recent chapters in a story that began almost 75 years ago. That said, it is clear that both the DARPA Challenges and the aggressive promotion by Google have ignited a surge in research and development activity and may well have accelerated introduction of automation features on current automobiles.
The concept of road vehicle automation dates back to the late 1930s and the visionary ideas of Norman Bel Geddes, the industrial designer who inspired and developed the 1939 General Motors “Futurama” exhibit at the New York World’s Fair. At that time, automated highways were predicted to become reality in 25 years.
Serious technical work on automation of road vehicles began in the late 1940s at the RCA Sarnoff Laboratory and continued through the 1950s in partnership between RCA and GM. By the early 1960s GM had developed several generations of concept cars and research prototypes that were able to drive automatically (when the technology had to be implemented using analog vacuum tube circuitry). GM showed a more ambitious vision for highway automation in the “Futurama II” exhibit at the 1964–1965 New York World’s Fair, again predicting that it would be achieved in the next 25 years.
An extensive program of research led by Prof. Robert Fenton at the Ohio State University advanced the road vehicle automation technology further between 1965 and 1980, producing more advanced research prototypes. These were predicted to be on the road by 1990.
There was a hiatus in research on road vehicle automation for most of the 1980s until the University of California and Caltrans began extensive research on this subject in the PATH Program in the late 1980s. That work led to the creation of the federally-funded National Automated Highway Systems Consortium (NAHSC) program (1994–1998), which produced a large demonstration of a variety of road vehicle automation concepts in San Diego in August 1997. That Demo ’97 received extensive international media coverage and provided fully-automated vehicle demonstration rides to thousands of invited visitors, who were very favorably impressed by what they experienced.
However, the NAHSC program was terminated after the demonstration (the only milestone that was Congressionally mandated) and before it could develop the prototype system it was originally intended to develop. The prototype and a specification for a deployable system were scheduled to be completed in 2002, and those would have been the basis for a field operational test in the subsequent years. The U.S. government did not want to wait that long for the fruits of that effort to ripen, but wanted to focus on technologies that it thought would be less challenging and could be brought to market more quickly [1].
Throughout this history, the deployment of automated driving systems has always been over the horizon, just out of sight and reach. There have been manifold reasons for that, but it is important to understand this history in order to make accurate predictions about deployment timelines in the future. This longer perspective is also useful to bring to bear when thinking about the problems that still need to be solved before the multiple levels of road vehicle automation can be implemented widely. In short, thoughtful examination of the similarities and the differences between this past and the present is essential to a grounded discussion of the future of road vehicle automation.
Many organizations and individuals have become interested in the general topic of road vehicle automation in recent years, but without a clear view of what specific actions they could take to accelerate progress. This is where the identification of research needs becomes an important contribution of the workshop, particularly since such needs have not been widely considered or documented publicly for the past 15 years, since the final recommendations of the NAHSC for future work were presented. Bringing together experts with a wide range of experience and knowledge in the relevant subject matter enabled the development of a broad collection of research needs based on knowledge of what has already been done (to avoid duplication of prior work) and of the most important problems that have not yet been solved. These research needs are useful to a wide range of stakeholder interests:
-
Public agencies that need to allocate their research resources to the subjects where they can have the most favorable impact
-
Private companies looking for opportunities to develop new products that solve important problems to create good business opportunities
-
Consultants seeking to understand where new contract opportunities are likely to arise
-
Academic researchers seeking topics for graduate student theses or unsolicited proposals to funding agencies.
4 Workshop Organization and Structure
The workshop program was developed between January and June 2013, starting with the initial meeting of the TRB Joint Subcommittee on Challenges and Opportunities for Road Vehicle Automation, at the end of the TRB 2013 Annual Meeting. That meeting, a brainstorming session with about one hundred participants, was aimed at identifying the most important topics for breakout sessions on research needs. At the end of that meeting, breakout topics were chosen and volunteers signed up to work on the development and management of those breakout sessions. A chair was selected for each breakout, and those chairs worked with their subcommittees of volunteers to develop the breakout session programs, relying on conference calls and e-mail distribution lists.
The overall meeting planning was coordinated by an executive committee consisting of the authors of this article. These workshop co-chairs conducted frequent conference calls and e-mail exchanges and met approximately monthly with the broader planning committee, including the breakout session leaders and other volunteers in charge of vehicle demonstrations, the workshop’s website, communications, and fundraising. Meanwhile, TRB and Stanford staff, in cooperation with the co-chairs, worked through numerous logistical issues related to the meeting’s complexity and novelty.
The co-chairs not affiliated with Stanford selected the plenary speakers. This was difficult because the organizers wanted to include twice as many speakers as the schedule would accommodate and because multiple additional well-qualified people requested invitations to speak. The criteria for selecting speakers were multiple—they had to be thought leaders in the subject matter who were also effective at holding the attention of a large audience. As a group, the plenary speakers also needed to represent a balanced mix of the relevant stakeholder interests, nationalities, and types of organizations. Finally, topics were selected to match up with at least one of the breakout sessions so that there would be a logical linkage between the plenaries and breakouts. The plenary talks that were finally included in the program were:
-
Bernard Soriano (California DMV): Autonomous Vehicles in California
-
Bryant Walker Smith (Stanford University): Proximity-Driven Liability
-
Steve Underwood (University of Michigan, Dearborn): Disruptive Innovation on the Path to Sustainable Mobility: Creating a Roadmap for Road Transportation in the United States
-
Clifford Nass (Stanford University): Psychology of Automated Vehicles
-
R. David Edelman (White House Office of Science and Technology Policy)
-
Joe Peters [Federal Highway Administration (FHWA)]: Accelerating Road-Vehicle Automation
-
Paul Rau [National Highway Traffic Safety Administration (NHTSA)]: Safety Through Automation Program
-
Maxime Flament (ERTICO, representing the European Commission): Automated Driving from the European Perspective
-
Yasuhiro Okumura (Japan’s Ministry of Land, Infrastructure, Transport and Tourism): Automated Driving Activities in Japan
-
Jan Becker (Bosch): Toward Fully Automated Driving
-
Arne Bartels (Volkswagen): High Automated Driving Functions
-
Dirk Rossberger (BMW): Please Take Over
-
Joakim Svensson [Volvo Group (trucks)]: Current Status and Future Opportunities
-
Adriano Alessandrini [University of Rome La Sapienza (CityMobil2)]: Automated Road Transport Systems in European Cities
-
Ron Medford (Google): Why Self-Driving.
Ten parallel breakout sessions were held for discussion of research needs in their respective topic areas. Some of these included extensive presentations by subject matter experts to set the scene for the rest of the participants, while others moved directly into discussion of their research needs. The breakout groups ranged from a minimum of about ten to a maximum of about 75 participants, depending on the level of interest and workshop attendance in their topic area. These breakout topics were:
-
Automated commercial vehicle operations
-
Cybersecurity and resiliency
-
Data ownership, access, protection, and discovery
-
Energy and environment
-
Human factors and human-machine interaction
-
Infrastructure and operations
-
Liability, risk, and insurance
-
Shared mobility and transit
-
Testing, certification, and licensing
-
V2X communication and architecture.
These topics included a rich combination of mode-specific themes such as commercial vehicles and transit with cross-cutting themes on both technical and non-technical topics.
Additional topics were explored in 20 posters presented at the workshop and posted to the website. These posters were solicited less than 2 months before the workshop and were selected based on peer reviews of 200-word abstracts.
Because the TRB workshop brought together a large number of people from throughout the world who are interested in road vehicle automation, this made it an attractive opportunity for scheduling ancillary meetings related to automation:
-
The SAE International On-Road Automated Vehicle Standards (ORAVS) committee held an open meeting to present and discuss the work that its members had been doing during the preceding 18 months. This included an extended discussion of the definitions and classifications that they have defined to help facilitate clearer communication about vehicle automation concepts. The accompanying figure [2] summarizes SAE’s levels of automation as discussed at this open meeting and subsequently published in SAE Information Report J3016.
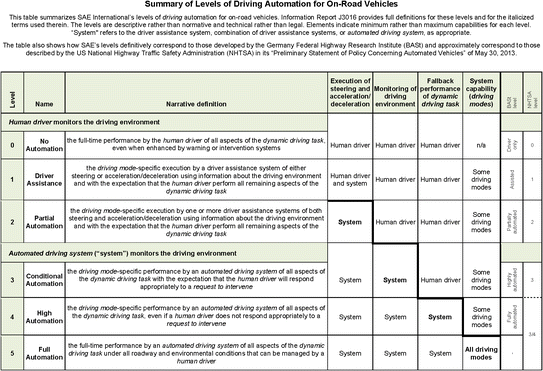
-
The U.S. Department of Transportation held a Public Stakeholder Engagement Meeting to present its current thinking about the definition of its research plans related to road vehicle automation. This led to a lively exchange of questions and answers with the audience.
-
The state of California organized a half-day meeting to discuss California-specific topics in road vehicle automation, specifically the industrial competitiveness issues associated with the cluster of automotive research laboratories in Silicon Valley, the implications of automation for the state’s road infrastructure and public agencies, and the development of regulations to govern the testing and public operation of automated vehicles by its Department of Motor Vehicles.
-
Two public transportation-oriented TRB committees, Major Activity Center Circulation Systems and Emerging and Innovative Public Transportation and Technologies, organized a “Strategy Day” to discuss the implications of automation for public transportation, energy, emissions and land use.
-
The U.S. DOT hosted a day-long meeting of the trilateral Automation in Road Transportation Working Group, comprising representatives of the European Commission, Japan Ministry of Land, Infrastructure, Transportation, and Tourism, and U.S.DOT, which built from the content of the workshop to continue its consideration of automation research issues of shared significance.

5 Future Directions
The research needs statements developed by the 2013 breakout groups are being refined for ratification by the TRB standing committees for subsequent inclusion in TRB’s online database of research needs statements. This database is publicly accessible at rns.trb.org.
The response of the 2013 workshop participants to the post-conference survey showed a high level of interest in participating in a similar meeting in 2014. The participants liked the mixture of high-level plenary presentations, detailed breakout discussions on focused topics, and live demonstrations of technology, so those elements will be retained. There was also strong support for returning to the San Francisco Bay Area, since it is a world high-technology capital and center for development of vehicle automation systems.
For this 2014 workshop, TRB plans to partner with the Association of Unmanned Vehicle Systems International (AUVSI). AUVSI has conducted its own Detroit-based “Driverless Car Summit” in 2012 and 2013. The organizers of both conferences felt that there was significant synergy in combining forces to offer a single venue for all interested communities in 2014. In common with TRB’s 2013 workshop, the 2014 Road Vehicle Automation Symposium will feature informational and inspirational plenary speeches as well as breakout sessions to examine research needs and other important focused topics.
Breakout session topics and content under consideration for the 2014 workshop will be developed with the leadership of TRB committees, with new participation from committees in planning, operations, and human factors. The sessions will build on the current research needs statements, where applicable, and develop new statements or document the proceedings of the session with papers and session summaries. With the expectation that automation will continue to grow in significance, TRB is planning for a fourth workshop in 2015, location and theme still to be determined. It should be noted that participation in the TRB Joint Subcommittee on Road Vehicle Automation is open to the broad transportation community, enabling those with interest in automation, and willingness to volunteer their time, to become actively involved in planning and producing the workshop.
Road vehicle automation has emerged with new levels of interest in the past several years, fueled by a “perfect storm” of interest from the public consumer segment, increased research and development by research institutions as well as automotive manufacturers, and support by government at all levels, including NHTSA, due to the potential for greatly enhanced safety, efficiency and mobility. TRB has a responsibility to guide and support this activity to assure that the requisite research is conducted and information disseminated to maximize the benefits for all.
References
U.S. General Accounting Office (1997) DOT’s automated highway system program. Report GAO/RCED-97-177R, 9 June 1997
Smith BW (2013) SAE levels of driving automation. http://cyberlaw.stanford.edu/loda (18 Dec 2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Shladover, S.E., Lappin, J., Denaro, R.P., Smith, B.W. (2014). Introduction: The Transportation Research Board’s 2013 Workshop on Road Vehicle Automation. In: Meyer, G., Beiker, S. (eds) Road Vehicle Automation. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-319-05990-7_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-05990-7_1
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-05989-1
Online ISBN: 978-3-319-05990-7
eBook Packages: EngineeringEngineering (R0)