
Abstract
We consider weak solutions to nonlinear hyperbolic systems of conservation laws arising in compressible fluid dynamics and we describe recent work on the design of structure-preserving numerical methods. We focus on preserving, on one hand, the late-time asymptotics of solutions and, on the other hand, the geometrical effects that arise in certain applications involving curved space. First, we study here nonlinear hyperbolic systems with stiff relaxation in the late time regime. By performing a singular analysis based on a Chapman–Enskog expansion, we derive an effective system of parabolic type and we introduce a broad class of finite volume schemes which are consistent and accurate even for asymptotically late times. Second, for nonlinear hyperbolic conservation laws posed on a curved manifold, we formulate geometrically consistent finite volume schemes and, by generalizing the Cockburn–Coquel–LeFloch theorem, we establish the strong convergence of the approximate solutions toward entropy solutions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
1.1 Objective
We present some recent developments on shock capturing methods for nonlinear hyperbolic systems of balance laws, whose prototype is the Euler system of compressible fluid flows, and especially discuss structure-preserving techniques. The problems under consideration arise with complex fluids in realistic applications when friction terms, geometrical terms, viscosity and capillarity effects, etc., need to be taken into account in order to achieve a proper description of the physical phenomena. For these problems, it is necessary to design numerical methods that are not only consistent with the given partial differential equations, but remain accurate and robust in certain asymptotic regimes of physical interest. That is, certain structural properties of these hyperbolic problems (conservation or balance law, equilibrium state, monotonicity properties, etc.) are essential in many applications, and one seeks that the numerical solutions preserve these properties, which is often a very challenging task.
To be able to design structure-preserving methods, a theoretical analysis of the hyperbolic problems under consideration must be performed first by investigating certain singular limits as well as certain classes of solutions of physical relevance. The mathematical analysis allows one to exhibit the key properties of solutions and derive effective equations that describe the limiting behavior of solutions, etc. This step requires a deep understanding of the initial value problem, as is for instance the case of small-scale dissipation sensitive, viscosity-capillarity driven shock waves which, as it turns out, do not satisfy standard entropy criteria; see LeFloch [45] for a review. Such a study is in many physical applications involving hyperbolic systems in nonconservative form, in order to avoid the appearance of spurious solutions with wrong speed; see Hou and LeFloch [38].
The design of structure-preserving schemes forces us to go beyond the basic property of consistency with the conservative form of the equations, and requires to revisit the standard strategies, based on finite volumes, finite differences, Runge–Kutta techniques, etc. By mimicking the theoretical analysis at the discrete numerical level, we can arrive at structure-preserving schemes, which preserve the relevant structure of the systems and the asymptotic behavior of solutions.
The techniques developed for model problems provide us with the proper tools to tackle the full problems of physical interest. A variety of nonlinear hyperbolic problems arising in the applications do involve small scales or enjoy important structural or asymptotic properties. By going beyond the consistency with the conservation form of the equations, one can now develop a variety of numerical methods that preserve these properties at the discrete level. By avoid physically wrong solutions, one can understand first the physical phenomena in simplified situations, and next contribute to validate the “full” physical models.
We will only review here two techniques which allows one to preserve late-asymptotics and geometrical terms and, for further reading on this broad topic, we refer to the textbooks [12, 45, 56], as well as the lecture notes [44, 47, 49]. Another challenging application arises in continuum physics in the regime of (small) viscosity and capillarity, which may still drive the propagation of certain (nonclassical undercompressive) shock waves. This is relevant in material science for the modeling of smart (martensite) materials, as well as in fluid dynamics for the modeling of multiphase flows (for instance in the context of nuclear plants) and for the coupling of physical models across interfaces.
1.2 Preserving Late-Time Asymptotics with Stiff Relaxation
In Sect. 2, this strategy is developed for a class of hyperbolic systems with stiff relaxation in the regime of late times. Such systems arise in the modeling of a complex multi-fluid flow when two (or more) scales drive the behavior of the flow. Many examples from continuum physics fall into the proposed framework, for instance the Euler equations with (possibly nonlinear) friction. In performing a singular analysis of these hyperbolic systems, we keep in mind the analogy with the passage from Boltzmann equation (microscopic description) to the Navier–Stokes equations (macroscopic description). Our aim here is, first, to derive via a formal Chapman–Enskog expansion an effective system of parabolic type and, second, to design a scheme which provides consistent and accurate discretizations for all times, including asymptotically late times.
Indeed, we propose and analyze a class of asymptotic-preserving finite volume methods, which are consistent with, both, the given nonlinear hyperbolic system and the effective parabolic system. It thus preserves the late-time asymptotic regime and, importantly, requires only a classical CFL (Courant, Friedrichs, Lewy) condition of hyperbolic type, rather than a more restrictive, parabolic-type stability condition. This section is based on the joint work [9, 11].
1.3 Geometry-Preserving Finite Volume Methods
The second topic of interest here is provided by the class of hyperbolic conservation laws posed on a curved space. Such equations are relevant in geophysical applications, for which the prototype is given by shallow water equations on the sphere with topography. Computations of large-scale atmospheric flows and oceanic motions (involving the Coriolis force, Rosby waves, etc.) requires robust numerical methods. Another motivation is provided conservation laws on moving surfaces describing combustion phenomena. We should astrophysical applications, involving fluids or plasmas, and the study of the propagation of linear waves (wave operator, Dirac equations, etc.) on curved backgrounds of general relativity (such as Schwarschild or, more generally, Kerr spacetime). These applications provide important examples where the partial differential equations of interest are naturally posed on a curved manifold.
Scalar conservation laws yield a drastically simplified, yet very challenging, mathematical model for understanding nonlinear aspects of shock wave propagation on manifolds. In Sect. 3, based on the work [52], we introduce the geometry-preserving finite volume method for hyperbolic balance laws formulated on surfaces or, more generally, manifolds. First, we present some theoretical tools to handle the interplay between the nonlinear waves propagating on solutions and the underlying geometry of the problem. A generalization of the standard Kruzkov theory is obtained on a manifold, by formulating the hyperbolic equation under consideration from a field of differential forms. The proposed finite volume method is geometry-consistent and relies on a coordinate-independent formulation. The actual implementation of this finite volume scheme on the sphere is realized in [3, 5].
2 Late-Time Asymptotics with Stiff Relaxation
2.1 A Class of Nonlinear Hyperbolic Systems of Balance Laws
Consider the following system of partial differential equations
in which \(t\,>\,0,\,x\,\in \,\mathbb{R}\) denote the time and space variables and the flux \(F:\varOmega \rightarrow \mathbb{R}^{N}\) is defined on the convex and open subset Ω. The first-order part of (1) is assumed to be hyperbolic in the sense that the matrix-valued map A(U): = D U F(U) admits real eigenvalues and a full basis of eigenvectors.
In order to analyze the singular limit ε → 0 of late-time and stiff relaxation, we distinguish between two distinct regimes. In the hyperbolic-to-hyperbolic regime, one replaces ε ∂ t U by ∂ t U and establishes that solutions to
are driven by an effective system of hyperbolic type. Such a study was pioneered by Chen, Levermore, and Liu [21]. On the other hand, in the hyperbolic-to-parabolic regime which is under consideration in the present work, we obtain effective equations of parabolic type. In the earlier papers [31, 58], Marcati et al. established rigorous convergence theorems for several classes of models. Our objective here is to introduce a general framework to design numerical methods for such problems.
We make the following assumptions.
Condition 1.
There exists an n × N matrix Q with (maximal) rank n < N such that
hence, QU ∈ QΩ = : ω satisfies
Condition 2.
There exists a map \(\mathcal{E}:\omega \, \subset \,\mathbb{R}^{N}\,\rightarrow \,\varOmega\) describing the equilibria u ∈ ω, with
We introduce the equilibrium submanifold \(\mathcal{M}:=\big\{ U = \mathcal{E}(u)\big\}\).
Condition 3.
It is assumed that
Observe that the term \(\partial _{x}\big(\mathit{QF}(\mathcal{E}(u))\big)\) must vanish identically, so that \(\mathit{QF}(\mathcal{E}(u))\) must be a constant, which we normalize to be 0.
Condition 4.
For all u ∈ ω, we impose
hence, the N × N matrix B := DR U has “maximal” kernel on the equilibrium manifold.
2.2 Models Arising in Compressible Fluid Dynamics
2.2.1 Stiff Friction
We begin with the Euler system for compressible fluids with friction:
The density ρ ≥ 0 and the velocity v are the main unknowns, while the pressure \(p\,:\,\mathbb{R}^{+} \rightarrow \mathbb{R}^{+}\) is a prescribed function satisfying the hyperbolicity condition p′(ρ) > 0 (for ρ > 0). The first-order homogeneous system is strictly hyperbolic and (7) fits into our late-time/stiff relaxation framework in Sect. 2.1 if we set
and Q = (1 0). The local equilibria u = ρ are found to be scalar-valued with \(\mathcal{E}(u) = \left (\rho,\,0\right )^{T}\) and we immediately check that \(\mathit{QF}(\mathcal{E}(u)) = 0\).
2.2.2 Stiff Radiative Transfer
The following model arises in the theory of radiative transfer:
The radiative energy e > 0 and the radiative flux f are the main unknowns, restricted so that | f∕e | ≤ 1, while τ > 0 is the temperature. The so-called Eddington factor \(\chi: [-1,1] \rightarrow \mathbb{R}^{+}\) is, typically, taken to be \(\chi (\xi ) = \frac{3+4\xi ^{2}} {5+2\sqrt{4-3\xi ^{2}}}.\) Again, this system fits within our general framework.
2.2.3 Coupling Stiff Friction and Stiff Radiative Transfert
By combining the previous two examples together, one can consider to the following coupled Euler/M1 model
Here, κ and σ are positive constants and, in the applications, a typical choice for the pressure is p(ρ) = C p ρ η with C p ≪ 1 and η > 1. Now, we should set
and the local equilibria read
so that, once again, \(\mathit{QF}(\mathcal{E}(u)) = 0\).
2.3 An Expansion Near Equilibria
Our singular analysis proceeds with a Chapman–Engskog expansion around a local equilibria u = u(t, x) ∈ ω. We set
and requires that \(\epsilon \,\partial _{t}U^{\epsilon } + \partial _{x}F(U^{\epsilon }) = -R(U^{\epsilon })/\epsilon.\) We thus obtain QU 1 = QU 2 = … = 0 and then
In turn, we deduce that
The zero-order terms imply that \(U_{1} \in \mathbb{R}^{N}\) satisfies the algebraic system
which we can solve in U 1. At this juncture, we rely on the condition QU 1 = 0 and the following lemma.
Lemma 1 (Technical Lemma).
If C is an N × N matrix satisfying \(\dim \ker C = n\) and \(\ker C \cap \text{Im }C =\big\{ 0\big\}\) , and if Q is an n × N matrix of rank n, then for all \(J \in \mathbb{R}^{N}\) , there exists a unique solution \(V \in \mathbb{R}^{N}\) to C V = J and QV = 0 QJ = 0.
Proposition 1 (First-Order Corrector Problem).
The first-order term U 1 is characterized by \(B(\mathcal{E}(u))\,U_{1} = -\partial _{x}\big(F(\mathcal{E}(u))\big)\) and QU 1 = 0.
Considering next the first-order terms, we arrive at
and, after multiplication by Q and using \(Q\mathcal{E}(u) = u\),
On the other hand, by differentiating QR(U) = 0, we get Q D U 2 R. (U 1, U 1) ≡ 0 and Q B U 2 ≡ 0. This leads us to the following conclusion.
Theorem 1 (Late Time/Stiff Relaxation Effective Equations).
The effective system reads
for some n × n matrix \(\mathcal{M}(u)\) and with U 1 being the unique solution to
2.4 Mathematical Entropy Pair for Stiff Balance Laws
We now assuming now that a mathematical entropy \(\varPhi:\varOmega \rightarrow \mathbb{R}\) exists and satisfies the following two additional conditions:
Condition 5.
There exists an entropy-flux \(\varPsi:\varOmega \rightarrow \mathbb{R}\) such that D U Φ A = D U Ψ in Ω. So, all smooth solutions satisfy
and, consequently, the matrix D U 2 Φ A is symmetric in Ω. Moreover, the map Φ is convex, i.e. the N × N matrix D U 2 Φ is positive definite on \(\mathcal{M}\).
Condition 6.
The entropy is compatible withe the relaxation in the sense that
Next, we return to the effective equations \(\partial _{t}u = \partial _{x}\mathcal{D}\) sand \(\mathcal{D}:= -\mathit{QA}(\mathcal{E}(u))\,U_{1}\) and, multiplying it by the Hessian of the entropy, we see that \(U_{1} \in \mathbb{R}^{N}\) is characterized by
with \(\mathcal{L}(u) = D_{U}^{2}\varPhi (\mathcal{E}(u))B(\mathcal{E}(u))\).
Denoting by \(\mathcal{L}(u)^{-1}\) the generalized inverse with constraint and setting \(S(u):= \mathit{QA}(\mathcal{E}(u))\), we obtain
Finally, one can check that, with \(v:= \partial _{x}\left (D_{u}\varPhi (\mathcal{E})\right )^{T}\),
Theorem 2 (Entropy Structure of the Effective System).
When a mathematical entropy is available, the effective equations take the form
with
where, for all b satisfying Qb = 0, the unique solution to \(\mathcal{L}(u)V = b\) , QV = 0 is denoted by \(\mathcal{L}(u)^{-1}b\) (generalized inverse).
This result can be formulated in the so-called entropy variable \(\big(D_{u}\varPhi (\mathcal{E}(u))\big)^{T}\). Furthermore, a dissipation property follows from our assumptions and, specifically, from the entropy and equilibrium properties (see \(R(\mathcal{E}(u)) = 0\)), we obtain
Thus, the matrix \(D_{U}^{2}\Big(D_{U}\varPhi R\Big)\vert _{U=\mathcal{E}(u)}\) is non-negative definite. It follows that
so that \(D_{U}^{2}\varPhi \,B\vert _{U=\mathcal{E}(u)} \geq 0\) in ω.
For the equilibrium entropy \(\varPhi (\mathcal{E}(u))\), the associated (entropy) flux \(u\mapsto \varPsi (\mathcal{E}(u))\) is constant on the equilibrium manifold ω. For the map \(\varPsi (\mathcal{E})\), we have
Observe that \(\big(D_{U}\varPhi \big)(\mathcal{E}) = D_{u}\big(\varPhi (\mathcal{E})\big)Q\), so that
Since \(\mathit{QF}(\mathcal{E}) = 0\), then \(D_{u}\mathit{QF}(\mathcal{E}) = 0\) and the proof is completed.
Therefore, \(D_{u}\big(\varPsi (\mathcal{E}(u))\big) = 0\) for all u ∈ ω. From the expansion \(U^{\epsilon } = \mathcal{E}(u) +\epsilon U_{1}+\ldots\), where U 1 is given by the first-order corrector problem, we deduce
and then \(\partial _{x}\varPsi (U^{\epsilon }) =\epsilon \, \partial _{x}D_{U}\varPsi (\mathcal{E}(u))\,U_{1} + \mathcal{O}(\epsilon ^{2})\). Similarly, for the relaxation source, we have
We thus get
At this juncture, recall that \(X\,\,\big(D_{U}^{2}\varPhi \big)(\mathcal{E})B(\mathcal{E})\,X \geq 0\) for \(X \in \mathbb{R}^{N}\).
Proposition 2 (Monotonicity of the Entropy).
The entropy is non-increasing, i.e.
and
2.5 Effective Models
2.5.1 Effective Model for Stiff Friction
We now analyze the diffusive regime for the Euler equations with friction. According to the general theory, the equilibria satisfy \(\partial _{t}\rho = -\partial _{x}\Big(\mathit{QA}(\mathcal{E}(u))\,U_{1}\Big)\) with
Here, U 1 is the unique solution to \(B(\mathcal{E}(u))U_{1} = -\partial _{x}\big(F(\mathcal{E}(u))\big)\) and QU 1 = 0 with
The effective diffusion equation for the Euler equations with friction thus read:
which is a nonlinear parabolic equation (away from vacuum) since p′(ρ) > 0. Near the vacuum, this equation is often degenerate since p′(ρ) typically vanishes at ρ = 0. For instance for polytropic gases p(ρ) = κ ρ γ with κ > 0 and γ ∈ (1, γ) we get
Defining the internal energy e(ρ) > 0 by e′(ρ) = p(ρ)∕ρ 2 we see that, for all smooth solutions to (7),
so that \(\varPhi (U) =\rho \frac{v^{2}} {2} +\rho e(\rho )\) is a convex entropy and is compatible with the relaxation. All the conditions of the general framework are therefore satisfied.
2.5.2 Effective Model for Stiff Radiative Transfer
This system is compatible with our late-time/stiff relaxation framework with now
The equilibria read u = τ +τ 4 and
and we have \(\mathit{QF}(\mathcal{E}(u)) = 0\).
We determine the diffusive regime for the M1 model from
where U 1 is the solution to
Therefore, we have \(U_{1} = \left (\begin{array}{c} 0 \\ \frac{4} {3}\tau ^{3}\partial _{ x}\tau \\ 0 \end{array} \right )\) and the effective diffusion equation reads
which admits an entropy.
2.5.3 Effective Model for Stiff Friction and Stiff Radiative Transfert
Here, we have
and the effective diffusion system for the coupled Euler/M1 model reads
The second equation is a heat equation, and its solution appears as a source-term in the first one.
2.5.4 Effective Model for Stiff Nonlinear Friction
Our framework encompass handle certain nonlinear diffusion regime under the scaling
The parameter q ≥ 1 introduces a new scale and is necessary when the relaxation is nonlinear. We assume that
for some matrix M(ε). In that regime, the effective equations are now nonlinear parabolic.
Our final example requires this more general theory and reads
where h is the fluid height and v the fluid velocity v. The pressure reads p(h) = g h 2∕2 while g > 0 is the gravity constant. The friction \(\kappa: \mathbb{R}^{+} \rightarrow \mathbb{R}^{+}\) is a positive function, and for instance one can take \(\kappa (h) = \frac{\kappa _{0}} {h}\) with κ 0 > 0.
The nonlinear version of the late-time/stiff relaxation framework applies by introducing
The equilibria u = h are associated with
The relaxation is nonlinear and
with
in turn, we obtain a nonlinear effective equation for the Euler equations with nonlinear friction, i.e.
which is a parabolic and fully nonlinear.
Introducing the internal energy e(h): = gh∕2, we see that all smooth solutions to (15) satisfy the entropy inequality
The entropy \(\varPhi (U):= h\frac{v^{2}} {2} + g\frac{h^{2}} {2}\) satisfies the compatibility properties for the nonlinear late-time/stiff relaxation theory, with
where \(\bar{U}_{1} = (0\ \beta )\,\). We obtain \(R(\mathcal{E}(u) + M(0)\bar{U}_{1}) = c(u)\bar{U}_{1}\) with
2.6 A Class of Asymptotic-Preserving Finite Volume Method
2.6.1 The General Strategy
We now will design a class of finite volume schemes which are consistent with the asymptotic regime ε → 0 and allow us to recover the effective diffusion equation (independently of the mesh-size) for the limiting solutions. Hence, we develop here a rather general framework adapted to the hyperbolic-to-parabolic relaxation regime.
- Step 1.:
-
We rely on a arbitrary finite volume scheme for the homogeneous system
$$\displaystyle{\partial _{t}U + \partial _{x}F(U) = 0,}$$as described below.
- Step 2.:
-
Next, we modify this scheme and include a matrix-valued free parameter in order to consistently approximate the non-homogeneous system (for any γ > 0)
$$\displaystyle{\partial _{t}U + \partial _{x}F(U) = -\gamma \,R(U).}$$ - Step 3.:
-
By performing an asymptotic analysis of this scheme after replacing the discretization parameter Δ t by ε Δ t, and γ by 1∕ε, we then determine the free parameters and ensure the desired asymptotic-preserving property.
For definiteness, the so-called HLL discretization of the homogeneous system (Harten, Lax, and van Leer [36]) are now discussed. We present the solver based on a single intermediate state and on a uniform mesh with cells of length Δ x, that is,
for all i = …, −1, 0, 1, …. The time discretization is based on some Δ t restricted by the CFL condition [28] with t m+1 = t m +Δ t.
Given any initial data (lying in Ω):
we design approximations that are piecewise constant at each t m, that is,
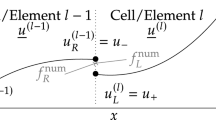
At each cell interface we use the approximate Riemann solver
where b > 0 is (sufficiently) large. The “numerical cone” (and numerical diffusion) is determined by some b > 0 and, for simplicity in the presentation, we assume a single constant b. More generally, one can introduce distinct speeds b i+1∕2 − < b i+1∕2 + at each interface.
We introduce the intermediate state
and, under the CFL condition \(b\frac{\varDelta t} {\varDelta x} \leq 1/2\), the underlying Riemann solutions are non-interacting. Our global approximations
are defined as follows.
At the time t m+1, we set
and, recalling \(\tilde{U}_{i+1/2}^{\star } = \frac{1} {2}(U_{i}^{m} + U_{ i+1}^{m}) - \frac{1} {2b}(F(U_{i+1}^{m}) - F(U_{ i}^{m})),\) and integrating out the expression given by the Riemann solutions, we arrive at the scheme adapted to our homogeneous system
where
More generally one can include here two speeds b i+1∕2 − < b i+1∕2 +.
This scheme enjoys an invariant domain property, as follows. The intermediate states \(\tilde{U}_{i+1/2}^{\star }\) can be written in the form of a convex combination
provided b is large enough. An alternative decomposition is
where \(\overline{A}\) is an “average” of D U F. By induction, we conclude that \(\tilde{U}_{i}^{m}\) in Ω for all m, i.
2.6.2 Handling the Stiff Relaxation
Consider the modified Riemann solver:
with, at the interface,
We have introduced an arbitrary N × N-matrix and an N-vector by
The term \(\underline{\sigma }\) is a parameter matrix and we require that all inverse matrices are well-defined and, importantly, the correct asymptotic regime arises at the discrete level (see below).
At each x i+1∕2, we use the Riemann solver \(U_{\mathcal{R}}(\frac{x-x_{i+1/2}} {t-t^{m}};U_{i}^{m},U_{i+1}^{m})\) and superimpose non-interacting Riemann solutions
The approximation at the time t m+1 reads \(U_{i}^{m+1} =\int _{ x_{i-1/2}}^{x_{i+1/2} }U_{\varDelta x}^{m}(x,t^{m} +\varDelta t)\,\mathit{dx}\). By integration of the Riemann solutions, we arrive at the following discrete form of the balance law
The source can rewritten as
and
Our finite volume scheme for late-time/stiff-relaxation problems finally read
Theorem 3 (A Class of Finite Volume Schemes for Relation Problems).
When
and the matrix-valued map \(\underline{\sigma }\) is smooth, the finite volume scheme above is consistent with the hyperbolic system with relaxation and satisfies the following invariant domain property: provided all states
belong to Ω, then all of the states U i m belong to Ω.
2.7 Effective Equation for the Discrete Asymptotics
We replace Δ t by Δ t∕ε and γ by 1∕ε and consider the expression
in which
We expand near an equilibrium state \(U_{i}^{m} = \mathcal{E}(u_{i}^{m}) +\epsilon (U_{1})_{i}^{m} + \mathcal{O}(\epsilon ^{2})\) and find
The first-order terms yield us
Assuming here the existence of an n × n matrix \(\mathcal{M}_{i+1/2}\) satisfying
and multiplying the equation above by Q, we get
where
The asymptotic system for the scheme thus reads
Recall that for some matrix \(\mathcal{M}(u)\), the effective equation reads \(\partial _{t}u\,=\,\partial _{x}\left (\mathcal{M}(u)\partial _{x}u\right )\).
Theorem 4 (Discrete Late-Time Asymptotic-Preserving Property).
Assume that the matrix-valued coefficients satisfy the following conditions:
-
The matrices \(I +\underline{\sigma } _{i+1/2}\) and \(\Big(1 + \frac{\varDelta x} {2\epsilon b}\Big)I +\underline{\sigma } _{i+1/2}\) are invertible for all ε ∈ [0,1].
-
There exists a matrix \(\mathcal{M}_{i+1/2}\) satisfying the commutation condition
$$\displaystyle{Q(I +\underline{\sigma } _{i+1/2})^{-1} = \frac{1} {b^{2}}\mathcal{M}_{i+1/2}Q.}$$ -
The discrete formulation of \(\mathcal{M}(u)\) at each interface x i+1∕2 satisfies
$$\displaystyle{\mathcal{M}_{i+1/2} = \mathcal{M}(u) + \mathcal{O}(\varDelta x).}$$
Then the effective system associated with the proposed finite volume scheme coincides with the effective system determined in the late-time/stiff relaxation framework.
Finally, wee refer to [9] for various numerical experiments demonstrating the relevance of the proposed scheme and its efficiency in order to compute late-time behaviors of solutions. Asymptotic solutions may have large gradients but are in fact regular. Note that our CFL stability condition is based on the homogeneous hyperbolic system and therefore imposes a restriction on Δ t∕Δ x only. In our test, for simplicity, the initial data were taken in the image of Q, while the reference solutions (needed for the purpose of comparison) were computed separately by solving the associated parabolic equations, of course under a (much more restrictive) restriction on Δ t∕(Δ x)2.
The proposed theoretical framework for late-time/stiff relaxation problems thus led us to the development of a good strategy to design asymptotic-preserving schemes involving matrix-valued parameter. The convergence analysis (ε → 0) and the numerical analysis (Δ x → 0) for the problems under consideration are important and challenging open problems. It would be very interesting to apply our technique to plasma mixtures in a multi-dimensional setting.
Furthermore, high-order accurate Runge–Kutta methods have been recently developed for these stiff relaxation problems by Boscarino and Russo [10] and by Boscarino, LeFloch, and Russo [11].
3 Geometry-Preserving Finite Volume Methods
3.1 Objective and Background Material
On a smooth (n + 1)-dimensional manifold M referred to as a spacetime, we consider the class of nonlinear conservation laws
For all \(\overline{u} \in \mathbb{R}\), \(\omega =\omega (\overline{u})\) is a smooth field of n-forms, referred to as the flux field of the conservation law under consideration.
Two examples are of particular interest. When \(M = \mathbb{R}_{+} \times N\) and the n-manifold N is endowed with a Riemannian metric h, (21) reads
where div h denotes the divergence operator for the metric h. The flux field is then considered as a flux vector field \(b = b(\overline{u})\) on the n-manifold N and is independent of the time variable.
More generally, when M is endowed with a Lorentzian metric g, (21) reads
in which the flux \(a = a(\overline{u})\) is now a vector field on M. In this Riemannian or Lorentzian settings, the theory of weak solutions on manifolds was initiated by Ben-Artzi and LeFloch [4] and developed in [1, 2, 46, 51].
In the present paper, we discuss the novel approach in which the conservation law is written in the form (21), that is, the flux \(\omega =\omega (\overline{u})\) is defined as a field of differential forms of degree n. No geometric structure is assumed on M and the sole flux field structure is assumed. The Eq. (21) is a “conservation law” for the unknown quantity u, as follows from Stokes theorem for sufficiently smooth solutions u: the total flux
vanishes for every smooth open subset \(\mathcal{U}\). By relying on (21) rather than the equivalent expressions in the special cases of Riemannian or Lorentzian manifolds, we develop a theory of entropy solutions which is technically and conceptually simpler and provides a generalization of earlier works. From a numerical perspective, relying o (21) leads us to a geometry-consistent class of finite volume schemes, as we will now present it. So, our main objective i this presentation will be a generalization of the formulation and convergence of the finite volume method for general conservation law (21). In turn, this will also establish the existence of a contracting semi-group of entropy solutions.
We will proceed as follows:
-
First we will formulate the initial and boundary problem for (21) by taking into account the nonlinearity and hyperbolicity of the equation. We need to impose that the manifold satisfies a global hyperbolicity condition, which provides a global time-orientation and allow us to distinguish between “future” and “past” directions in the time-evolution and we suppose that the manifold is foliated by compact slices.
-
Second, we introduce a geometry-consistent version of the finite volume method which provides a natural discretization of the conservation law (21), which solely uses the n-volume form structure associated with the flux field ω.
-
Third, we derive stability estimates, especially certain discrete versions of the entropy inequalities. We obtain a uniform control of the entropy dissipation measure, which, however, is not sufficient by itself to establish the compactness of the sequence of solutions. Yet, these stability estimates imply that the sequence of approximate solutions generated by the finite volume scheme converges to an entropy measure-valued solution in the sense of DiPerna.
-
Fourth, to conclude we rely on DiPerna’s uniqueness theorem [30] and establish the existence of entropy solutions to the corresponding initial value problem.
In the course of our analysis, we will derive the following contraction property: for any entropy solutions u, v and any hypersurfaces H, H′ such that H′ lies in the future of H, one has
Here, for all reals \(\overline{u},\overline{v}\), the n-form field \(\boldsymbol{\varOmega }(\overline{u},\overline{v})\) is determined from the flux field \(\omega (\overline{u})\) and is a generalization (to the spacetime setting) of the notion (introduced in [42]) of Kruzkov entropy \(\vert \overline{u} -\overline{v}\vert \).
DiPerna’s measure-valued solutions were first used to establish the convergence of schemes by Szepessy [64], Coquel and LeFloch [25–27], and Cockburn, Coquel, and LeFloch [22, 23]. Further hyperbolic models including a coupling with elliptic equations and many applications were investigated by Kröner [40], and Eymard, Gallouet, and Herbin [34]. For higher-order schemes, see Kröner, Noelle, and Rokyta [41]. See also Westdickenberg and Noelle [66].
3.2 Entropy Solutions to Conservation Laws Posed on a Spacetime
We assume that M is an oriented, compact, differentiable (n + 1)-manifold with boundary. Given an (n + 1)-form α, its modulus is defined as the (n + 1)-form \(\vert \alpha \vert:= \vert \overline{\alpha }\vert \,\mathit{dx}^{0} \wedge \cdots \wedge \mathit{dx}^{n}\), where \(\alpha = \overline{\alpha }\,\mathit{dx}^{1} \wedge \cdots \wedge \mathit{dx}^{n}\) is written in an oriented frame determined in coordinates x = (x α) = (x 0, …, x n). If H is a hypersurface, we denote by i = i H : H → M the canonical injection map, and by i ∗ = i H ∗ is the pull-back operator acting on differential forms defined on M.
We introduce the following notion:
-
A flux field ω on the (n + 1)-manifold M is a parametrized family \(\omega (\overline{u}) \in \varLambda ^{n}(M)\) of smooth fields of differential forms of degree n, that depends smoothly upon the real parameter \(\overline{u}\).
-
The conservation law associated with a flux field ω and with unknown \(u: M \rightarrow \mathbb{R}\) is
$$\displaystyle{ d\big(\omega (u)\big) = 0, }$$(24)where d is the exterior derivative operator and, therefore, \(d\big(\omega (u)\big)\) is a field of differential forms of degree (n + 1).
-
A flux field ω is said to grow at most linearly if for every 1-form ρ on M
$$\displaystyle{ \sup _{\overline{u}\in \mathbb{R}}\int _{M}\left \vert \rho \wedge \partial _{u}\omega (\overline{u})\right \vert < +\infty. }$$(25)
In local coordinates x = (x α) we write (for all \(\overline{u} \in \mathbb{R}\)) \(\omega (\overline{u}) =\omega ^{\alpha }(\overline{u})\,(\widehat{dx})_{\alpha }\) and \((\widehat{dx})_{\alpha }:= \mathit{dx}\,^{0} \wedge \ldots \wedge \mathit{dx}\,^{\alpha -1} \wedge \mathit{dx}\,^{\alpha +1} \wedge \ldots \wedge \mathit{dx}\,^{n}\). Here, the coefficients \(\omega ^{\alpha } =\omega ^{\alpha }(\overline{u})\) are smooth. The operator d acts on differential forms and that, given a p-form ρ and a p′-form ρ′, one has d(dρ) = 0 and \(d(\rho \wedge \rho ^{\prime}) = d\rho \wedge \rho ^{\prime} + (-1)^{p}\rho \wedge d\rho ^{\prime}\). The Eq. (24) makes sense for unknowns that are Lipschitz continuous. However, solutions to nonlinear hyperbolic equations need not be continuous and we need to recast (24) in a weak form.
Given a smooth solution u of (24) we apply Stokes theorem on any open subset \(\mathcal{U}\) (compactly included in M and with smooth boundary \(\partial \mathcal{U}\)) and find
Similarly, given any smooth function \(\psi: M \rightarrow \mathbb{R}\) we write \(d(\psi \,\omega (u)) = d\psi \wedge \omega (u) +\psi \, d(\omega (u))\), where dψ is a 1-form field. Provided u satisfies (24), we deduce that
and, by Stokes theorem,
A suitable orientation of the boundary ∂ M is required for this formula to hold.
Definition 1 (Weak Solutions on a Spacetime).
Given a flux field (with at most linear growth) ω, a function u ∈ L 1(M) is a weak solution to (24) on the spacetime M if \(\int _{M}d\psi \wedge \omega (u) = 0\) for every \(\psi: M \rightarrow \mathbb{R}\) that is compactly supported in the interior \(\mathring{M}\).
Observe that the function u is integrable and \(\omega (\overline{u})\) has at most linear growth in \(\overline{u}\), so that the (n + 1)-form \(d\psi \wedge \omega (u)\) is integrable on the compact manifold M.
Definition 2.
A (smooth) field of n-forms \(\varOmega =\varOmega (\overline{u})\) is a (convex) entropy flux field for (24) if there exists a (convex) function \(U: \mathbb{R} \rightarrow \mathbb{R}\) such that
It is admissible if, moreover, \(\sup \vert \partial _{u}U\vert < \infty \).
If we choose the function \(U(\overline{u},\overline{v}):= \vert \overline{u} -\overline{v}\vert \), where \(\overline{v}\) is a real parameter, the entropy flux field reads
This is a generalization to spacetimes of the so-called Kruzkov’s entropy pairs.
Next, given any smooth solution u to (24), we multiply (24) by ∂ u U(u) and obtain the conservation law
For discontinuous solutions, we impose the entropy inequalities
in the sense of distributions for all admissible entropy pair (U, Ω). This is justified, for instance, via the vanishing viscosity method, i.e. by searching for weak solutions realizable as limits of smooth solutions to a parabolic regularization.
It remains to prescribe initial and boundary conditions. We emphasize that, without further assumption on the flux field (to be imposed shortly below), points along the boundary ∂ M can not be distinguished and it is natural to prescribe the trace of the solution along the whole of the boundary ∂ M. This is possible provided the boundary data, \(u_{B}: \partial M \rightarrow \mathbb{R}\), is assumed by the solution in a suitably weak sense. Following Dubois and LeFloch [32], we use the notation
for all convex entropy pair (U, Ω), where for all reals \(\overline{u}\)
Definition 3 (Entropy Solutions on a Spacetime with Boundary).
Let \(\omega =\omega (\overline{u})\) be a flux field (with at most linear growth) and let \(u_{B} \in L^{1}(\partial M)\) be a boundary function. A function u ∈ L 1(M) is an entropy solution to the boundary value problem (24) and (30) if there exists a bounded and measurable field of n-forms γ ∈ L 1 Λ n(∂ M) such that, for every admissible convex entropy pair (U, Ω) and every smooth function \(\psi: M \rightarrow \mathbb{R}_{+}\),
This definition makes sense since each of the terms \(d\psi \wedge \varOmega (u)\), (dΩ)(u), (dω)(u) belong to L 1(M). Following DiPerna [30], we can also consider solutions that are no longer functions but Young measures, i.e, weakly measurable maps \(\nu: M \rightarrow \text{Prob}(\mathbb{R})\) taking values within is the set of probability measures \(\text{Prob}(\mathbb{R})\).
Definition 4.
Let \(\omega =\omega (\overline{u})\) be a flux field with at most linear growth and let \(u_{B} \in L^{\infty }(\partial M)\) be a boundary function. A compactly supported Young measure \(\nu: M \rightarrow \text{Prob}(\mathbb{R})\) is an entropy measure-valued solution to the boundary value problem (24), (30) if there exists a bounded and measurable field of n-forms \(\gamma \in L^{\infty }\varLambda ^{n}(\partial M)\) such that, for all convex entropy pair (U, Ω) and all smooth functions ψ ≥ 0,
3.3 Global Hyperbolicity and Geometric Compatibility
The manifold M is now assumed to be foliated by hypersurfaces, say
where each slice has the topology of a (smooth) n-manifold N with boundary. Topologically we have M ≃ [0, T] × N, and
We impose a non-degeneracy condition on the averaged flux on the hypersurfaces.
Definition 5.
Let M be a manifold endowed with a foliation (31)–(32) and let \(\omega =\omega (\overline{u})\) be a flux field. Then, the conservation law (24) on M satisfies the global hyperbolicity condition if there exist constants \(0 <\underline{ c} < \overline{c}\) such that, for every non-empty hypersurface \(e \subset H_{t}\), the integral \(\int _{e}i^{{\ast}}\partial _{u}\omega (0)\) is positive and the function \(\varphi _{e}: \mathbb{R} \rightarrow \mathbb{R}\),

satisfies
The function \(\varphi _{e}\) represents the averaged flux along e. From now, we assume that the conditions above are satisfied and we refer to H 0 as an initial hypersurface and we prescribe an initial data \(u_{0}: H_{0} \rightarrow \mathbb{R}\) on this hypersurface. We impose a boundary data u B on the submanifold B. We sometimes refer to H t as spacelike hypersurfaces.
Under the global hyperbolicity condition (31)–(33), the initial and boundary value problem takes the following form. The boundary condition (30) decomposes into an initial data
and a boundary condition
Correspondingly, the condition in Definition 3 reads
Definition 6.
A flux field ω is geometry-compatible if it is closed for each value of the parameter,
This condition ensures that constants are trivial solutions, a property shared by many models of fluid dynamics (such as the shallow water model). When (36) holds, it follows from Definition 2 that every entropy flux field Ω satisfies \((d\varOmega )(\overline{u}) = 0\) (for all \(\overline{u} \in \mathbb{R}\)) and the entropy inequalities (29) for a solution \(u: M \rightarrow \mathbb{R}\) take the simpler form
3.4 The Spacetime Finite Volume Method
We now assume that M = [0, T] × N is foliated by slices with compact topology N, and the initial data u 0 is bounded. We assume that the global hyperbolicity condition holds and the flux field ω is geometry-compatible. Let \(\mathcal{T}^{h} =\bigcup _{K\in \mathcal{T}^{h}}K\) be a triangulation of M, that is, a collection of cells (or elements), determined as the images of polyhedra of \(\mathbb{R}^{n+1}\), satisfying:
-
The boundary ∂ K of an element K is a piecewise smooth, n-manifold, \(\partial K =\bigcup _{e\subset \partial K}e\) and contains exactly two spacelike faces e K + and e K − and “vertical” elements
$$\displaystyle{e^{0} \in \partial ^{0}K:= \partial K\setminus \big\{e_{ K}^{+},e_{ K}^{-}\big\}.}$$ -
The intersection \(K \cap K^{\prime}\) of two distinct elements \(K,K^{\prime} \in \mathcal{T}^{h}\) is either a common face of K, K′ or else a submanifold with dimension at most (n − 1).
-
The triangulation is compatible with the foliation in the sense that there exist times t 0 = 0 < t 1 < … < t N = T such that all spacelike faces are submanifolds of \(H_{n}:= H_{t_{n}}\) for some n = 0, …, N, and determine a triangulation of the slices. We denote by \(\mathcal{T}_{0}^{h}\) the set of all K which admit one face belonging to the initial hypersurface H 0.
We define the measure | e | of a hypersurface e ⊂ M by
This quantity is positive if e is sufficiently “close” to one of the hypersurfaces along which we have the hyperbolicity condition (33). Provided | e | > 0 which is the case if e is included in one of the slices of the foliation, we associate to e the function \(\varphi _{e}: \mathbb{R} \rightarrow \mathbb{R}\). The following hyperbolicity condition holds along the triangulation since the spacelike elements are included in the spacelike slices:
Next, we introduce the finite volume method by averaging (24) over each element \(K \in \mathcal{T}^{h}\). Applying Stokes theorem with a smooth solution u to (24), we get
Decomposing the boundary ∂ K into its parts e K +, e K −, and ∂ 0 K, we obtain
Given the averaged values u K − along e K − and \(u_{K_{ e^{0}}}^{-}\) along \(e^{0} \in \partial ^{0}K,\) we need an approximation u K + of the solution u along e K +. The second term in (40) can be approximated by
and the last term by \(\int _{e^{0}}i^{{\ast}}\omega (u) \approx q_{K,e^{0}}(u_{K}^{-},u_{K_{ e^{0}}}^{-})\), where the total discrete flux \(q_{K,e^{0}}: \mathbb{R}^{2} \rightarrow \mathbb{R}\) (i.e., a scalar-valued function) must be prescribed.
Finally, the proposed version of the finite volume method for the conservation law (24) takes the form
or, equivalently,
We assume that the functions \(q_{K,e^{0}}\) satisfy the following properties for all \(\overline{u},\overline{v} \in \mathbb{R}:\)
-
Consistency:
$$\displaystyle{ q_{K,e^{0}}(\overline{u},\overline{u}) =\int _{e^{0}}i^{{\ast}}\omega (\overline{u}). }$$(43) -
Conservation:
$$\displaystyle{ q_{K,e^{0}}(\overline{v},\overline{u}) = -q_{K_{ e^{0}},e^{0}}(\overline{u},\overline{v}). }$$(44) -
Monotonicity:
$$\displaystyle{ \partial _{\overline{u}}q_{K,e^{0}}(\overline{u},\overline{v}) \geq 0,\qquad \partial _{\overline{v}}q_{K,e^{0}}(\overline{u},\overline{v}) \leq 0. }$$(45)
We need to specify the discretization of the initial data and define constant initial values u K, 0 = u K − (for \(K \in \mathcal{T}_{0}^{h}\)) associated with H 0, by setting
We also define a piecewise constant function \(u^{h}: M \rightarrow \mathbb{R}\) by, for every element \(K \in \mathcal{T}^{h}\),
We introduce \(N_{K}:= \#\partial ^{0}K\), the total number of “vertical” neighbors of an element \(K \in \mathcal{T}^{h}\), supposed to be uniformly bounded. We fix a finite family of local charts covering the manifold M, and assume that the parameter h coincides with the largest diameter of faces e K ± of elements \(K \in \mathcal{T}^{h}\), where the diameter is computed with the Euclidian metric in chosen local coordinates.
We also impose the Courant–Friedrich–Levy condition (for all \(K \in \mathcal{T}^{h}\))
in which the supremum and infimum in u are taken over the range of the initial data. Finally, we assume that the family of triangulations satisfy
where \(\tau _{\max }:=\max _{i}(t_{i+1} - t_{i})\) and \(\tau _{\min }:=\min _{i}(t_{i+1} - t_{i})\). For instance, these conditions are satisfied if \(\tau _{\max }\), τ min, and h vanish at the same order.
Our main objective in this presentation is establishing the convergence of the proposed finite volume schemes towards an entropy solution. Our analysis of the finite volume method will rely on a decomposition of (42) into (essentially) one-dimensional schemes, a technique that goes back to Tadmor [65], Coquel and LeFloch [25], and Cockburn, Coquel, and LeFloch [24].
By applying Stokes theorem to (36) with some \(\overline{u} \in \mathbb{R}\), we obtain
Choosing \(\overline{u} = u_{K}^{-}\), we deduce
which can be combined with (42):
We introduce the intermediate values \(\tilde{u}_{K,e^{0}}^{+}\):
and thus arrive at the convex decomposition
Given any entropy pair (U, Ω) and hypersurface e ⊂ M satisfying | e | > 0 we introduce the averaged entropy flux along e:

Lemma 2.
For every convex entropy flux Ω one has
In fact, the function \(\varphi _{e_{K}^{+}}^{\varOmega } \circ (\varphi _{ e_{K}^{+}}^{\omega })^{-1}\) is convex.
Proof.
It suffices to show the inequality for the entropy flux, and then average this inequality over e. We need to check
namely
with
In the right-hand side, the former term vanishes identically (see (51)) and the latter term is non-negative, since U(u) is convex and ∂ u ω is positive. □
3.5 Discrete Entropy Estimates
From the decomposition (52), we derive the discrete entropy inequalities of interest.
Lemma 3 (Entropy Inequalities for the Faces).
For all convex entropy pair (U,Ω) and all \(K \in \mathcal{T}^{h}\) and \(e^{0} \in \partial ^{0}K\) , there exists numerical entropy flux functions \(Q_{K,e^{0}}: \mathbb{R}^{2} \rightarrow \mathbb{R}\) satisfying (for all \(u,v \in \mathbb{R}\)):
-
\(Q_{K,e^{0}}\) is consistent with the entropy flux Ω:
$$\displaystyle{ Q_{K,e^{0}}(u,u) =\int _{e^{0}}i^{{\ast}}\varOmega (u). }$$(55) -
Conservation property:
$$\displaystyle{ Q_{K,e^{0}}(u,v) = -Q_{K_{ e^{0}},e^{0}}(v,u). }$$(56) -
Discrete entropy inequality:
$$\displaystyle{ \begin{array}{ll} \varphi _{e_{K}^{+}}^{\varOmega } & (\tilde{u}_{ K,e^{0}}^{+}) -\varphi _{ e_{K}^{+}}^{\varOmega }(u_{ K}^{-}) + \frac{N_{K}} {\vert e_{K}^{+}\vert }\Big(Q_{K,e^{0}}(u_{K}^{-},u_{K_{ e^{0}}}^{-}) - Q_{K,e^{0}}(u_{K}^{-},u_{K}^{-})\Big) \leq 0.\end{array} }$$(57)
Proof.
- Step 1. :
-
For \(u,v \in \mathbb{R}\) and \(e^{0} \in \partial ^{0}K\), let us set
$$\displaystyle{H_{K,e^{0}}(u,v):=\varphi _{e_{K}^{+}}(u) - \frac{N_{K}} {\vert e_{K}^{+}\vert }\Big(q_{K,e^{0}}(u,v) - q_{K,e^{0}}(u,u)\Big)}$$and note that \(H_{K,e^{0}}(u,u) =\varphi _{e_{K}^{+}}(u)\). We now check that \(H_{K,e^{0}}\) satisfies
$$\displaystyle{ \frac{\partial } {\partial u}H_{K,e^{0}}(u,v) \geq 0,\qquad \frac{\partial } {\partial v}H_{K,e^{0}}(u,v) \geq 0. }$$(58)The second property is immediate by the monotonicity (45). For the first one, we recall the CFL condition (48) and the monotonicity (45). From the definition of \(H_{K,e^{0}}(u,v)\), we have
$$\displaystyle{H_{K,e^{0}}(u,u_{K_{ e^{0}}}) =\big (1 -\sum _{e^{0}\in \partial ^{0}K}\alpha _{K,e^{0}}\big)\varphi _{e_{K}^{+}}(u) +\sum _{e^{0}\in \partial ^{0}K}\alpha _{K,e^{0}}\varphi _{e_{K}^{+}}(u_{K_{ e^{0}}}),}$$and
$$\displaystyle{\alpha _{K,e^{0}}:= \frac{1} {\vert e_{K}^{+}\vert }\frac{q_{K,e^{0}}(u,u_{K_{ e^{0}}}) - q_{K,e^{0}}(u,u)} {\varphi _{e_{K}^{+}}(u) -\varphi _{e_{K}^{+}}(u_{K_{ e^{0}}})}.}$$This gives a convex combination of \(\varphi _{e_{K}^{+}}(u)\) and \(\varphi _{e_{K}^{+}}(u_{K_{ e^{0}}})\). By (45) we have \(\sum _{e^{0}\in \partial ^{0}K}\alpha _{K,e^{0}} \geq 0\) and, with (48),
$$\displaystyle{\sum _{e^{0}\in \partial ^{0}K}\alpha _{K,e^{0}} \leq \sum _{e^{0}\in \partial ^{0}K} \frac{1} {\vert e_{K}^{+}\vert }\Big\vert \frac{q_{K,e^{0}}(u,u_{K_{ e^{0}}}) - q_{K,e^{0}}(u,u)} {\varphi _{e_{K}^{+}}(u) -\varphi _{e_{K}^{+}}(u_{K_{ e^{0}}})} \Big\vert \leq 1.}$$ - Step 2. :
-
We will establish the entropy inequalities for Kruzkov’s entropies \(\boldsymbol{\varOmega }\). Introduce the discrete version of Kruzkov’s entropy flux
$$\displaystyle{\mathbf{Q}(u,v,c):= q_{K,e^{0}}(u \vee c,v \vee c) - q_{K,e^{0}}(u \wedge c,v \wedge c),}$$where \(a \vee b =\max (a,b)\) and \(a \wedge b =\min (a,b)\). Note that \(Q_{K,e^{0}}(u,v)\) satisfies the first two properties of the lemma with the entropy flux replaced by the Kruzkov’s family \(\varOmega = \boldsymbol{\varOmega }\) in (28).
First, we observe:
where

Second, we prove that for u = u K −, \(v = u_{K_{ e^{0}}}^{-}\) and for any \(c \in \mathbb{R}\)
Indeed, we have
where \(H_{K,e^{0}}\) is monotone in both variables. Since \(\varphi _{e_{K}^{+}}\) is monotone, we have
Combining this with (59) (with u = u K −, \(v = u_{K_{ e^{0}}}^{-}\)), we obtain the inequality
which implies a similar inequality for all convex entropy flux fields. □
We now combine Lemma 2 with Lemma 3.
Lemma 4 (Entropy Inequalities for the Elements).
For each \(K \in \mathcal{T}^{h}\) , one has
If V is convex, then a modulus of convexity for V is a positive real β < infV ″ (where the infimum is taken over the range of the data and solutions). In view of the proof of Lemma 2, \(\varphi _{e}^{\varOmega } \circ (\varphi _{e}^{\omega })^{-1}\) is convex for every spacelike hypersurface e and every convex function U. (Note that the discrete entropy flux terms do not appear in (62) below.)
Lemma 5 (Entropy Balance Inequality Between Two Hypersurfaces).
For \(K\,\in \,\mathcal{T}^{h}\) , denote by \(\beta _{e_{K}^{+}}\) a modulus of convexity for \(\varphi _{e_{K}^{+}}^{\varOmega } \circ \big (\varphi _{ e_{K}^{+}}^{\omega }\big)^{-1}\) and set \(\beta \,=\,\min _{K\in \mathcal{T}^{h}}\beta _{e_{K}^{+}}\) . Then, for i ≤ j one has
where \(\mathcal{T}_{t_{i}}^{h}\) is the subset of all K satisfying \(e_{K}^{-}\in H_{t_{i}}\) , and one sets \(\mathcal{T}_{[t_{i},t_{j})}^{h}:=\bigcup _{i\leq k<j}\mathcal{T}_{t_{k}}^{h}\) .
Proof.
Multiplying (57) by | e K + | ∕N K and summing in \(K \in \mathcal{T}^{h}\), e 0 ∈ ∂ 0 K yield
The conservation property (56) gives
and so
If V is convex and if \(v =\sum _{j}\alpha _{j}v_{j}\) is a convex combination of v j , then
where β = inf V ″, the infimum being taken over all v j . We apply this with \(v =\varphi _{e_{K}^{+}}(u_{K}^{+})\) and \(V =\varphi _{ e_{K}^{+}}^{\varOmega } \circ (\varphi _{ e_{K}^{+}}^{\omega })^{-1}\), which is convex.
In view of (52) and by multiplying the above inequality by | e K + | and summing in \(K \in \mathcal{T}^{h}\), we obtain
Combining the result with (64), we conclude that
Finally, using
we obtain the desired inequality, after further summation over all of K within two arbitrary hypersurfaces. □
We apply Lemma 5 and obtain an important uniform estimate.
Lemma 6 (Global Entropy Dissipation Estimate).
The entropy dissipation is globally bounded, as follows:
for some constant C > 0 depending upon the flux field and the sup-norm of the initial data. Here, Ω is the n-form entropy flux field associated with U(u) = u 2 ∕2.
Proof.
We apply (62) with the choice U(u) = u 2
After summing up in the “vertical” direction and keeping the contribution of all \(K \in \mathcal{T}_{0}^{h}\) on H 0, we deduce that
For some constant C > 0, we have \(\sum _{K\in \mathcal{T}_{0}^{h}}\vert e_{K}^{-}\vert \varphi _{e_{K}^{-}}^{\varOmega }(u_{ K,0}) \leq C\,\int _{H_{0}}i^{{\ast}}\varOmega (u_{ 0})\). These are essentially L 2 norm of the initial data, and this inequality is checked by fixing a reference volume form on H 0 and using the discretization (46) of the initial data u 0. □
3.6 Global Form of the Discrete Entropy Inequalities
One additional notation now is needed in order to handle “vertical face” of the triangulation: we fix a reference field of non-degenerate n-forms \(\tilde{\omega }\) on M (to measure the “area” of the faces e 0 ∈ ∂ K 0). This is used in the convergence proof only, but not in the formulation of the finite volume schemes. For every \(K \in \mathcal{T}^{h}\) we define
and the non-degeneracy condition is equivalent to \(\vert e^{0}\vert _{\tilde{\omega }} > 0\). Given a smooth function ψ defined on M and given a face e 0 ∈ ∂ 0 K of some element, we introduce
Lemma 7 (Global Form of the Discrete Entropy Inequalities).
Let Ω be a convex entropy flux field and let ψ ≥ 0 be a smooth function supported away from the hypersurface t = T. Then, the finite volume scheme satisfies the entropy inequality
with
Proof.
From the discrete entropy inequalities (57), we get
Thanks (56), we have \(\sum _{\begin{array}{c}K\in \mathcal{T}^{h} \\ e^{0}\in \partial ^{0}K\end{array}}\psi _{e^{0}}Q_{K,e^{0}}(u_{K}^{-},u_{K_{ e^{0}}}^{-}) = 0\) and, from (55),
Next, we observe
where, we recalled (53) and the convex combination (52). From
the inequality (69) reads
The first term in (70) reads
We sum up with respect to K the identities
and we combine them with (70). We arrive at the desired conclusion by observing that
□
3.7 Convergence and Well-Posedness Results
This is the final step of our analysis.
Theorem 5 (Convergence Theory).
Under the assumptions in Sect. 3.4 , the family of approximate solutions u h generated by the finite volume scheme converges (as h → 0) to an entropy solution to the initial value problem (24), (34).
This theorem generalizes to spacetimes the technique originally introduced by Cockburn, Coquel and LeFloch [22, 23] for the (flat) Euclidean setting and extended to Riemannian manifolds by Amorim et al. [1] and to Lorentzian manifolds by Amorim et al. [2].
Corollary 1 (Well-Posedness Theory on a Spacetime).
Fix M = [0,T] × N a (n + 1)-dimensional spacetime foliated by n-dimensional hypersurfaces H t (t ∈ [0,T]) with compact topology N (cf. (24) ). Consider also a geometry-compatible flux field ω on M satisfying the global hyperbolicity condition (33) . Given any initial data u 0 on H 0 , the initial value problem (24), (34) admits a unique entropy solution u ∈ L ∞ (M) which has well-defined L 1 traces on spacelike hypersurface of M. These solutions determines a (Lipschitz continuous) contracting semi-group:
for any two hypersurfaces H,H′ such that H′ lies in the future of H, and the initial condition is assumed in the sense
The following conclusion was originally established by DiPerna [30] for conservation laws posed on the Euclidian space.
Theorem 6.
Fix ω a geometry-compatible flux field on M satisfying the global hyperbolicity condition (33) . Then, any entropy measure-valued solution ν to the initial value problem (24), (34) reduces to a Dirac mass and, more precisely,
where u ∈ L ∞ (M) is the entropy solution to the problem.
We now give a proof of Theorem 5. By definition, a Young measure ν represents all weak-∗ limits of composite functions a(u h) for all continuous functions a (as h → 0):
Lemma 8 (Entropy Inequalities for Young Measures).
Given any Young measure ν associated with the approximations u h . and for all convex entropy flux field Ω and smooth functions ψ ≥ 0 supported away from the hypersurface t = T, one has
Thanks to (75), for all convex entropy pairs (U, Ω) we have \(d\langle \nu,\varOmega (\cdot )\rangle \leq 0\) on M. On the initial hypersurface H 0 the Young measure ν coincides with the Dirac mass \(\delta _{u_{0}}\). By Theorem 6 there exists a unique function u ∈ L ∞(M) such that the measure ν coincides with the Dirac mass δ u . This implies that u h converge strongly to u, and this concludes our proof of convergence.
Proof.
We pass to the limit in (68), by using the property (74) of the Young measure. Observe that the left-hand side of (68) converges to the left-hand side of (75). Indeed, since ω is geometry-compatible, the first term
converges to \(\int _{M}\langle \nu,d\psi \wedge \varOmega (\cdot )\rangle\). On the other hand, one has
in which u 0 h is the initial discretization of the data u 0 converges strongly to u 0 since the maximal diameter h tends to zero.
The terms on the right-hand side of (68) also vanish in the limit h → 0. We begin with the first term A h(ψ). Taking the modulus, applying Cauchy–Schwarz inequality, and using (66), we obtain
hence
Here, Ω is associated with the quadratic entropy and we used that \(\vert \psi _{\partial ^{0}K} -\psi \vert \leq C\,(\tau _{\max } + h)\). Our conditions (49) imply that the upper bound for A h(ψ) tends to zero with h.
Next, we rely on the regularity of ψ and Ω and we estimate the second term in the right-hand side of (68). By setting \(C_{e^{0}}:= \frac{\int _{e^{0}}i^{{\ast}}\varOmega (u_{ K}^{-})} {\int _{e^{0}}i^{{\ast}}\tilde{\omega }}\), we obtain
hence \(\vert B^{h}(\psi )\vert \leq C\,\frac{(\tau _{\max }+h)^{2}} {h}\). This implies the upper bound for B h(ψ) tends to zero with h.
Finally, we treat the last term in the right-hand side of (68)
using the modulus defined earlier. In view of (54), we obtain
and it is now clear that C h(ψ) satisfies the same estimate as the one we derived for A h(ψ). □
References
Amorim, P., Ben-Artzi, M., LeFloch, P.G.: Hyperbolic conservation laws on manifolds: total variation estimates and the finite volume method. Methods Appl. Anal. 12, 291–324 (2005)
Amorim, P., LeFloch, P.G., Okutmustur, B.: Finite volume schemes on Lorentzian manifolds. Commun. Math. Sci. 6, 1059–1086 (2008)
Beljadid, A., LeFloch, P.G., Mohamadian, M.: A geometry-preserving finite volume method for conservation laws in curved geometries (2003, preprint HAL-00922214)
Ben-Artzi, M., LeFloch, P.G.: The well-posedness theory for geometry compatible hyperbolic conservation laws on manifolds. Ann. Inst. H. Poincaré Nonlinear Anal. 24, 989–1008 (2007)
Ben-Artzi, M., Falcovitz, J., LeFloch, P.G.: Hyperbolic conservation laws on the sphere: a geometry-compatible finite volume scheme. J. Comput. Phys. 228, 5650–5668 (2009)
Berthon, C., Turpault, R.: Asymptotic preserving HLL schemes. Numer. Meth. Partial Differ. Equ. 27, 1396–1422 (2011)
Berthon, C., Charrier, P., Dubroca, B.: An HLLC scheme to solve the M1 model of radiative transfer in two space dimensions. J. Sci. Comput. 31, 347–389 (2007)
Berthon, C., Coquel, F., LeFloch, P.G.: Why many theories of shock waves are necessary: kinetic relations for nonconservative systems. Proc. R. Soc. Edinb. 137, 1–37 (2012)
Berthon, C., LeFloch, P.G., Turpault, R.: Late-time/stiff-relaxation asymptotic-preserving approximations of hyperbolic equations. Math. Comput. 82, 831–860 (2013)
Boscarino, S., Russo, G.: On a class of uniformly accurate IMEX Runge-Kutta schemes and application to hyperbolic systems with relaxation. SIAM J. Sci. Comput. 31, 1926–1945 (2009)
Boscarino, S., LeFloch, P.G., Russo, G.: Highorder asymptotic preserving methods for fully nonlinear relaxation problems. SIAM J. Sci. Comput. (2014). See also ArXiv:1210.4761
Bouchut, F.: Nonlinear Stability of Finite Volume Methods for Hyperbolic Conservation Laws and Well-Balanced Schemes for Sources. Birkhäuser, Zurich (2004)
Bouchut, F., Ounaissa, H., Perthame, B.: Upwinding of the source term at interfaces for Euler equations with high friction. J. Comput. Math. Appl. 53, 361–375 (2007)
Boutin, B., Coquel, F., LeFloch, P.G.: Coupling techniques for nonlinear hyperbolic equations. I: self-similar diffusion for thin interfaces. Proc. R. Soc. Edinb. 141A, 921–956 (2011)
Boutin, B., Coquel, F., LeFloch, P.G.: Coupling techniques for nonlinear hyperbolic equations. III: the well–balanced approximation of thick interfaces. SIAM J. Numer. Anal. 51, 1108–1133 (2013)
Boutin, B., Coquel, F., LeFloch, P.G.: Coupling techniques for nonlinear hyperbolic equations. IV: multicomponent coupling and multidimensional wellbalanced schemes. Math. Comput. (2014). See ArXiv: 1206.0248
Buet, C., Cordier, S.: An asymptotic preserving scheme for hydrodynamics radiative transfer models: numerics for radiative transfer. Numer. Math. 108, 199–221 (2007)
Buet, C., Després, B.: Asymptotic preserving and positive schemes for radiation hydrodynamics. J. Comput. Phys. 215, 717–740 (2006)
Castro, M.J., LeFloch, P.G., Munoz-Ruiz, M.L., Pares, C.: Why many theories of shock waves are necessary: convergence error in formally path-consistent schemes. J. Comput. Phys. 227, 8107–8129 (2008)
Chalons, C., LeFloch, P.G.: Computing undercompressive waves with the random choice scheme: nonclassical shock waves. Interfaces Free Boundaries 5, 129–158 (2003)
Chen, G.Q., Levermore, C.D., Liu, T.P.: Hyperbolic conservation laws with stiff relaxation terms and entropy. Comm. Pure Appl. Math. 47, 787–830 (1995)
Cockburn, B., Coquel, F., LeFloch, P.G.: An error estimate for high-order accurate finite volume methods for scalar conservation laws. Preprint 91-20, AHCRC Institute, Minneapolis, 1991
Cockburn, B., Coquel, F., LeFloch, P.G.: Error estimates for finite volume methods for multidimensional conservation laws. Math. Comput. 63, 77–103 (1994)
Cockburn, B., Coquel, F., LeFloch, P.G.: Convergence of finite volume methods for multi-dimensional conservation laws. SIAM J. Numer. Anal. 32, 687–705 (1995)
Coquel, F., LeFloch, P.G.: Convergence of finite difference schemes for conservation laws in several space dimensions. C. R. Acad. Sci. Paris Ser. I 310, 455–460 (1990)
Coquel, F., LeFloch, P.G.: Convergence of finite difference schemes for conservation laws in several space dimensions: the corrected antidiffusive flux approach. Math. Comp. 57, 169–210 (1991)
Coquel, F., LeFloch, P.G.: Convergence of finite difference schemes for conservation laws in several space dimensions: a general theory. SIAM J. Numer. Anal. 30, 675–700 (1993)
Courant, R., Friedrichs, K., Lewy, H.: Über die partiellen Differenzengleichungen der mathematischen Physik. Math. Ann. 100, 32–74 (1928)
Dal Maso, G., LeFloch, P.G., Murat, F.: Definition and weak stability of nonconservative products. J. Math. Pures Appl. 74, 483–548 (1995)
DiPerna, R.J.: Measure-valued solutions to conservation laws. Arch. Ration. Mech. Anal. 88, 223–270 (1985)
Donatelli, D., Marcati, P.: Convergence of singular limits for multi-D semilinear hyperbolic systems to parabolic systems. Trans. Am. Math. Soc. 356, 2093–2121 (2004)
Dubois, F., LeFloch, P.G.: Boundary conditions for nonlinear hyperbolic systems of conservation laws. J. Differ. Equ. 31, 93–122 (1988)
Ernest, J., LeFloch, P.G., Mishra, S.: Schemes with well-controlled dissipation (WCD). I. SIAM J. Numer. Anal. (2014)
Eymard, R., Gallouët, T., Herbin, R.: The finite volume method. In: Handbook of Numerical Analysis, vol. VII, pp. 713–1020. North-Holland, Amsterdam (2000)
Greenberg, J.M., Leroux, A.Y.: A well-balanced scheme for the numerical processing of source terms in hyperbolic equations. SIAM J. Numer. Anal. 33, 1–16 (1996)
Harten, A., Lax, P.D., van Leer, B.: On upstream differencing and Godunov-type schemes for hyperbolic conservation laws. SIAM Rev. 25, 35–61 (1983)
Hayes, B.T., LeFloch, P.G.: Nonclassical shocks and kinetic relations: finite difference schemes. SIAM J. Numer. Anal. 35, 2169–2194 (1998)
Hou, T.Y., LeFloch, P.G.: Why nonconservative schemes converge to wrong solutions: error analysis. Math. Comput. 62, 497–530 (1994)
Jin, S., Xin, Z.: The relaxation scheme for systems of conservation laws in arbitrary space dimension. Commun. Pure Appl. Math. 45, 235–276 (1995)
Kröner, D.: Finite volume schemes in multidimensions. In: Numerical Analysis 1997 (Dundee). Pitman Research Notes in Mathematics Series, vol. 380, pp. 179–192. Longman, Harlow (1998)
Kröner, D., Noelle, S., Rokyta, M.: Convergence of higher-order upwind finite volume schemes on unstructured grids for scalar conservation laws with several space dimensions. Numer. Math. 71, 527–560 (1995)
Kruzkov, S.: First-order quasilinear equations with several space variables. Math. USSR Sb. 10, 217–243 (1970)
Lax, P.D.: Hyperbolic systems of conservation laws and the mathematical theory of shock waves. In: Regional Conference Series in Applied Mathematics, vol. 11. SIAM, Philadelphia (1973)
LeFloch, P.G.: An introduction to nonclassical shocks of systems of conservation laws. In: Kroner, D., Ohlberger, M., Rohde, C. (eds.) International School on Hyperbolic Problems, Freiburg, Germany, Oct. 1997. Lecture Notes on Computer Engineering, vol. 5, pp. 28–72. Springer, Berlin (1999)
LeFloch, P.G.: Hyperbolic systems of conservation laws: the theory of classical and nonclassical shock waves. In: Lectures in Mathematics. ETH Zürich/Birkhäuser, Basel (2002)
LeFloch, P.G.: Hyperbolic conservation laws and spacetimes with limited regularity. In: Benzoni, S., Serre, D. (eds.) Proceedings of 11th International Conference on Hyperbolic Problems: Theory, Numerics, and Applications, pp. 679–686. ENS Lyon, 17–21 July 2006. Springer, Berlin (See arXiv:0711.0403)
LeFloch, P.G.: Kinetic relations for undercompressive shock waves: physical, mathematical, and numerical issues. Contemp. Math. 526, 237–272 (2010)
LeFloch, P.G., Makhlof, H.: A geometry-preserving finite volume method for compressible fluids on Schwarzschild spacetime. Commun. Comput. Phys. (2014). See also ArXiv:1212.6622
LeFloch, P.G., Mishra, S.: Numerical methods with controled dissipation for small-scale dependent shocks. Acta Numer. (2014). See Preprint ArXiv 1312.1280
LeFloch, P.G., Mohamadian, M.: Why many shock wave theories are necessary: fourth-order models, kinetic functions, and equivalent equations. J. Comput. Phys. 227, 4162–4189 (2008)
LeFloch, P.G., Okutmustur, B.: Hyperbolic conservation laws on manifolds with limited regularity. C. R. Math. Acad. Sci. Paris 346, 539–543 (2008)
LeFloch, P.G., Okutmustur, B.: Hyperbolic conservation laws on spacetimes: a finite volume scheme based on differential forms. Far East J. Math. Sci. 31, 49–83 (2008)
LeFloch, P.G., Rohde, C.: High-order schemes, entropy inequalities, and nonclassical shocks. SIAM J. Numer. Anal. 37, 2023–2060 (2000)
LeFloch, P.G., Makhlof, H., Okutmustur, B.: Relativistic Burgers equations on curved spacetimes: derivation and finite volume approximation. SIAM J. Numer. Anal. (2012, preprint). ArXiv:1206.3018
LeVeque, R.J.: Balancing source terms and flux gradients in high-resolution Godunov methods: the quasi-steady wave-propagation algorithm. J. Comput. Phys. 146, 346–365 (1998)
LeVeque, R.J.: Finite volume methods for hyperbolic problems. In: Cambridge Texts in Applied Mathematics. Cambridge University Press, Cambridge (2002)
Marcati, P.: Approximate solutions to conservation laws via convective parabolic equations. Commun. Partial Differ. Equ. 13, 321–344 (1988)
Marcati, P., Milani, A.: The one-dimensional Darcy’s law as the limit of a compressible Euler flow. J. Differ. Equ. 84, 129–146 (1990)
Marcati, P., Rubino, B.: Hyperbolic to parabolic relaxation theory for quasilinear first order systems. J. Differ. Equ. 162, 359–399 (2000)
Nessyahu, H., Tadmor, E.: Non-oscillatory central differencing for hyperbolic conservation laws. J. Comput. Phys. 87, 408–463 (1990)
Russo, G.: Central schemes for conservation laws with application to shallow water equations. In: Rionero, S., Romano, G. (eds.) Trends Applied Mathematics and Mechanics, STAMM 2002, pp. 225–246. Springer, Italia SRL (2005)
Russo, G.: High-order shock-capturing schemes for balance laws. In: Numerical Solutions of Partial Differential Equations. Advanced Courses in Mathematics, CRM Barcelona, pp. 59–147. Birkhäuser, Basel (2009)
Russo, G., Khe, A.: High-order well-balanced schemes for systems of balance laws. In: Hyperbolic Problems: Theory, Numerics and Applications. Proceedings of Symposia in Applied Mathematics, Part 2, vol. 67, pp. 919–928. American Mathematical Society, Providence (2009)
Szepessy, S.: Convergence of a shock-capturing streamline diffusion finite element method for a scalar conservation law in two space dimensions. Math. Comput. 53, 527–545 (1989)
Tadmor, E.: Approximate solutions of nonlinear conservation laws. In: Advanced Numerical Approximation of Nonlinear Hyperbolic Equations (Cetraro, 1997). Lecture Notes in Mathematics, vol. 1697, pp. 1–149. Springer, Berlin (1998)
Westdickenberg, M., Noelle, S.: A new convergence proof for finite volume schemes using the kinetic formulation of conservation laws. SIAM J. Numer. Anal. 37, 742–757 (2000)
Acknowledgements
The author was partially supported by the Agence Nationale de la Recherche (ANR) through the grant ANR SIMI-1-003-01, and by the Centre National de la Recherche Scientifique (CNRS). These notes were written at the occasion of a short course given by the authors at the University of Malaga for the XIV Spanish-French School Jacques-Louis Lions. The author is particularly grateful to C. Vázquez-Cendón and C. Parés for their invitation, warm welcome, and efficient organization during his stay in Malaga.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
LeFloch, P.G. (2014). Structure-Preserving Shock-Capturing Methods: Late-Time Asymptotics, Curved Geometry, Small-Scale Dissipation, and Nonconservative Products. In: Parés, C., Vázquez, C., Coquel, F. (eds) Advances in Numerical Simulation in Physics and Engineering. SEMA SIMAI Springer Series, vol 3. Springer, Cham. https://doi.org/10.1007/978-3-319-02839-2_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-02839-2_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-02838-5
Online ISBN: 978-3-319-02839-2
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)