
Abstract
As a broadly used power system analytical simulation platform in the world, PSS/E has considerable advantage in the research of model simulations. However, the wind turbine generator (WTG) model in PSS/E ignores the variation of wind speed and cannot be used to study the impact of wind power volatility on power system. Based on the principle analysis for the PSS/E 2nd-generation generic wind turbine model, a variable wind speed WTG model is established by using the PSS/E user-defined function in this chapter. The effectiveness and correctness of these models are validated and proved in study cases. The research in this chapter enriches the transient model library in PSS/E and is benefit to the study of the wind generation influence on the operation and stability of the power system.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
As a rapidly developing clean energy, the installed capacity of wind turbines in the world is increasing year by year. However, due to the inherent volatility and randomness of wind power generation, the power electronics of grid-connected equipment and other new features, it will have a significant impact on the power quality and operation scheduling of the grid, which to some extent limits the overall consumption level of new energy in the grid [1]. To study the impact of large-scale wind power injection on power system operation and stability, a scientific and accurate wind turbine model needs to be established.
PSS/E is a commercial power system analysis tool developed by Siemens, which can accurately perform electromechanical transient simulation analysis of power system, and PSS/E contains accurate electromechanical transient models of wind turbine generator (WTG) [2], so it is often used as a simulation tool in the analysis of large-scale power system with wind power access. However, since the aerodynamic model of the generic wind turbine models in PSS/E is a linearized model [3], ignoring the change of wind speed, they are only applicable to cases where the wind speed remains constant for ~5–30 s after a disturbance occurs on the grid side [4]. Therefore, the generic wind turbine models cannot meet the requirements of studying the stochastic and intermittent wind power [5].
This chapter will describe the PSS/E 2nd-generation generic WTG, and use the PSS/E user-defined function [6] to establish a variable wind speed aerodynamic model and the corresponding pitch controller model for this variable wind speed WTG, and then verify the effectiveness of the user-defined variable wind speed WTG in this chapter through an example.
2 PSS/E Generic Wind Turbine Generator Model
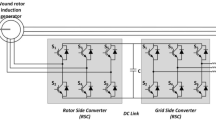
According to different structures, the International Electrotechnical Commission (IEC) classifies WTG into four categories [7]: Conventional Induction Generator (Type1 WTG), Variable Rotor-Resistance Induction Generator (Type2 WTG), Doubly-Fed Asynchronous Generator (Type3 WTG), and Full-Converter Unit (Type4 WTG). Four types of equivalent simplified WTG models are developed by model researchers, that is, the 2nd-generation generic WTG model, which ignores the simulation of fast dynamic characteristics, such as the stator and rotor transient processes of the generator and the converter DC capacitance voltage.
The model library of PSS/E contains the 2nd-generation generic WTG model, which is shown in Fig. 1. The model has seven parts [8]: the generator/converter model (REGCAU1), the electrical controls model (REECAU1), the drive-chain model (WTDTAU1), the pitch-controller model (WTPTAU1), a simple linear model of the turbine aero-dynamics (WTARAU1), the torque control model (WTTQAU1), and the wind power plant controller model (REPCAU1).

Overall block diagram of PSS/E 2nd-generation generic DFIG model
As is shown in Fig. 1, the initial values of Pe, Qe, and Vt are calculated from power flow; Qe∗ is sent from REPCAU1 to REECAU1, and Pe0∗ is calculated and processed by WTTQAU1 and sent to REECAU1; WTPTAU1 calculates β based on ωr, and passes it to WTARAU1 to obtain Pm; WTDTAU1 calculates ωr and ωt based on Pe and Pm; Iqcmd and Ipcmd are derived from REECAU1 based on Pe∗, Qe, Qe∗, and Vt through the current limiting logic and reactive/active power control within the model; REGCAU1 further processes Iqcmd and Ipcmd, and finally obtains Ip and Iq injected into the grid.
2.1 Mechanism of the Generic Turbine Aero-Dynamics Model
Figure 2 shows the structure of the generic turbine aero-dynamic model (WTARAU1), which is a simple linear wind turbine aerodynamic model [4]. The main function of this model is to output Pm and can be described as:

Block diagram of the simple turbine aero-dynamics model
The wind speed is assumed to be constant during the transient simulation in the generic turbine aero-dynamics model and a one-dimensional linear relationship is used to describe the mechanical power versus pitch angle, bypassing the need for the curve of Cp(λ, β).
The value of Pm∗ is calculated from the initialization of power flow in PSS/E and is equal to the actual active power output of WTG if β0 is 0. Although Pm∗ can be considered as the aerodynamic power captured by the turbine blades, the model does not directly reflect the relationship of the wind speed and aerodynamic power. Therefore, in order to meet the needs of variable wind speed study in PSS/E, a user-defined variable wind speed turbine aero-dynamics model is established in this chapter.
2.2 Mechanism of the Generic Pitch Controller Model
The structure of the generic pitch controller model (WTPTAU1) is shown in Fig. 3 and can be described as:

Block diagram of the pitch controller model
An output lag for blade response and two PI controllers are consisted in this model. The inputs of the PI controllers are speed deviation and power deviation.
The input variable ωr∗ is derived from WTTQAU1, obtained by looking up the MPPT (Maximum Power Point Tracking) curve according to the current value of Pe. For variable wind speed turbine aero-dynamics model, the deviation with ωr is the rated value of generator rotor angle speed ωr_max. Therefore, a pitch controller model is established in this paper to suit the needs of the simulation of variable wind speed WTG model.
3 PSS/E User-Defined Variable Wind Speed WTG Model
3.1 The User-Defined Modeling Function of PSS/E
When performing dynamic simulation in PSS/E, each model has some parameters and variables, such as gain coefficient, time constants, state variables, input and output variables. There are four general purpose storage arrays: CON (contains constants), STATE (contains state variables), VAR (contains algebraic variables), and ICON (contains integer variables). In addition, PSS/E sets up special arrays to contain some input and output variables. For user-defined WTG models, the common ones are ETERM (terminal voltage), WTRBSP (wind turbine rotor speed deviation), WPITCH (pitch angle), PELEC (active power), PMECH (mechanical power), etc.
The PSS/E UDM is independent of the PSS/E main program. It is only associated with the main program through the interface variables of the internal storage array and the FORTRAN code describing the UDM.
A complete program of UDM should be divided into eight subroutines, and the functions of each subroutine are shown in Table 1.
MODE 1–4 are essential in the program of UDM. The difficulty of UDM mainly lies in MODE 1 and MODE 2 subroutine writing, how to properly select state variables and correctly initialize and derive them is the key to user-defined modeling [6]. In addition, users can realize the calls of PSS/E power flow results and intermediate variables between different transient models by using the application program interface (API) provided by PSS/E in user-defined modeling [9].
3.2 User-Defined Modeling of a Variable Wind Speed Turbine Aero-Dynamics
Figure 4 shows the structure of the user-defined turbine aero-dynamics model, which is established on the basis of aerodynamic physical relations.

Block diagram of the variable wind speed turbine aero-dynamics model
Paero is the mechanical power generated by a single wind turbine, which depends on the efficiency of the wind-blade interaction in the energy conversion process, that is, Cp(λ, β), which can be expressed as:
Since the speed variable in PSS/E is in per unit and the famous value is needed to calculate Cp(λ, β), it is necessary to convert the unit of ωt at first, which can be described as:
Paero is the famous value of the aerodynamic power of a single turbine and Pm is the value of wind farm mechanical power in per unit for PSS/E transient simulation calculation, which can be described as:
3.3 User-Defined Modeling of a Pitch Controller
Through the analysis of the generic pitch controller model in Sect. 2.2, a pitch controller model for the variable wind speed turbine aero-dynamics model is established, which is shown in Fig. 5.

Block diagram of the user-defined pitch controller model
The difference between the generic and user-defined pitch controller model is that the UDM ignores the PI controller of power deviation and keeps the PI controller of speed deviation by referring to the strategy of pitch controller model in variable wind speed turbine model [10, 11]. The user-defined pitch controller model can be described as:
β is set to 0° to maximize the wind turbine power coefficient when the wind speed is lower than the rated value, so that the air kinetic energy can be captured to the maximum extent, and ωr is changed accordingly when the wind speed changes; when the wind speed raises to above the rated value, β is adjusted to reduce the output power of the wind turbine Pm, to make the output power of WTG Pe be rated power.
In summary, Fig. 6 shows the overall block diagram of the variable wind speed WTG model with a user-defined variable wind speed turbine aero-dynamics and the corresponding pitch controller model which can be used to research wind power volatility.

Block diagram of the user-defined variable wind speed WTG model
4 Study Cases of the User-Defined Variable Wind Speed WTG Model
A single machine infinite bus system for power flow and dynamic simulation is established based on [12], which is shown in Fig. 7, to simulate the step change in wind speed for the UDM. It is assumed that the wind farm has a rated active power of 100 MW, consisting of 67 wind turbines, each with a rated power of 1.5 MW. A step increase of wind speed occurs at 0.5 s and the result is shown in Fig. 8.

A single machine infinite bus system

The dynamic characteristic of user-defined variable wind speed WTG
It can be seen from Fig. 8, as the wind speed rose, Pm and Pe increased accordingly. When Pe increased above the rated value, ωt and β increased to reduce Pm by decreasing Cp(λ, β). Vt did not return to its initial state as the user-defined WTG reached a new stable operating point after a few seconds, but the deviation from the initial value is small. In addition, ωt restored to the rated value at the new stable operating point. Due to the inability of the pitch controller to respond instantly when the wind speed rises, the mechanical power has overshoot.
5 Conclusions
This chapter introduces the 2nd-generation generic WTG model of PSS/E and focuses on the analysis of generic turbine aero-dynamics and pitch controller model, followed by the establishment of a user-defined variable wind speed turbine aero-dynamics and the corresponding pitch controller model in PSS/E. The UDM is tested in a single machine infinite bus system through a step change of wind speed, and the results show that the user-defined variable wind speed WTG model can perform properly in response to wind speed changes and restore stability after a period of time, which is consistent with the actual situation.
The PSS/E transient model library is further enriched through the research of this chapter. Moreover, the establishment of the user-defined variable wind speed WTG model makes it possible to research the stochastic and intermittent wind power generation in the dynamic analysis of large-scale renewable energy grid-connected power generation.
Abbreviations
- β:
-
Wind turbine blade pitch angle
- β0:
-
Initial value of pitch angle
- βcmd:
-
Command value of pitch angle
- Cp(λ, β):
-
Wind turbine power coefficient
- Vt:
-
Terminal voltage of the wind turbine generator
- Ip,Iq:
-
Active and reactive current
- Ipcmd,Iqcmd:
-
Command value of active and reactive current
- Ka:
-
Coefficients for the gain controller
- Kpw,Kiw,Kpc,Kic :
-
Coefficients for the proportional-integral controller
- Tp:
-
Blade response time constant
- ωr,ωt:
-
Turbine shaft and generator rotor angle speed
- ωr _ max:
-
Generator rotor angle speed rated value
- ωr∗:
-
Reference value of generator rotor angle speed
- Pe,Qe:
-
Active and reactive power
- Pe∗,Qe∗:
-
Reference value of active and reactive power
- Pord:
-
Command value of active power
- Pe0∗:
-
Initial value of Pord
- Pm:
-
Mechanical power
- Pm∗:
-
Reference value of mechanical power
- Paero:
-
Aerodynamic power
- ρ:
-
Air density
- R:
-
Wind turbine blade radius
- Vw:
-
Wind speed
- λ:
-
Wind turbine tip-speed ratio
- GenSpeSynrad:
-
Synchronous speed
- GenboxRatio:
-
Gearbox ratio
- N:
-
Number of wind turbines in wind farm
- MBASE:
-
Wind farm capacity
References
Zhigang, Z., Kang, C.: Challenges and prospects for constructing the new-type power system towards a carbon neutrality future. Proc. CSEE. 42(8), 2806–2819 (2022)
Hiskens, I.A.: Dynamics of type-3 wind turbine generator models. IEEE Trans. Power Syst. 27(1), 465–474 (2011)
Siemens, P.T.I.: PSS/E Model Library of PSS/E-33.4, Schenectady, NY, USA (2013)
Price, W.W., Sanchez-Gasca, J.J.: Simplified wind turbine generator aerodynamic models for transient stability studies. In: 2006 IEEE PES Power Systems Conference and Exposition, pp. 986–992. IEEE, Atlanta (2006)
Zhang, L., et al.: Review on Generic Model for Wind Power Generation. Autom. Electric Power Syst. 40(12), 207–215 (2016)
Zhang, D., et al.: User-defined modeling in PSS/E and its applicability in simulations. Power Syst. Protect. Control. 44(5), 82–87 (2016)
IEC 61400-27 Working Group: Wind Turbines-Part 27-1: Electrical simulation models for wind power generation–Wind turbines. Final Draft International Standard (2014)
Pourbeik, P.: Technical update-generic models and model validation for wind turbine generators and photovoltaic generation. Palo Alto, USA (2013)
Wang, Y., et al.: Dynamic process simulation system based on power flow API of PSS/E. Power Syst. Protect. Control. 42(15), 136–141 (2014)
De, P.G.M., Sumper, A., Gomis-Bellmunt, O.: Modeling and control of a pitch-controlled variable-speed wind turbine driven by a DFIG with frequency control support in PSS/E. In: 2012 IEEE Power Electronics and Machines in Wind Applications, pp. 1–8. IEEE, Denver, Colorado, USA (2012)
Pan, X., et al.: Discussion on model structure of DFIG-based wind turbines. Autom. Electric Power Syst. 39(5), 7–14 (2015)
Seyedi, M.: Evaluation of the DFIG wind turbine built-in model in PSS/E. Chalmers University of Technology, Göteborg (2009)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Yu, Q., Guo, S., Gao, Q. (2024). User-Defined Pitch Controller and Variable Wind Speed Turbine Aero-Dynamics Model in PSS/E. In: Chen, L. (eds) Advances in Clean Energy Systems and Technologies. Green Energy and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-49787-2_8
Download citation
DOI: https://doi.org/10.1007/978-3-031-49787-2_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-49786-5
Online ISBN: 978-3-031-49787-2
eBook Packages: EnergyEnergy (R0)