
Abstract
According to the NPHCE (National Program for Health Care of the Elderly), by 2025, 12% of India’s population will be elderly, and the majority of them will favor independent living. Among them 8–10% needs the highest level of care. Therefore, the use of machine learning in AALS (Ambient Assisted Living Systems) areas like fall detection has the potential to significantly affect society. Falling is one of the most frequent accidents that can cause elderly individuals to sustain severe injuries or even die. Therefore, early fall detection is essential to minimizing the negative consequences of falls. The early detection and reporting of human falls may result in lifesaving. There have been numerous suggested fall monitoring systems. However, a large number of them identify a daily life activity as a fall. This paper describes the most current advances in machine learning (ML)-based fall detection and prevention systems. Recent works, ML algorithm, datasets, and age groups are thoroughly studied. Additionally, it offers a detailed analysis of current fall detection system trends as well as potential future directions by addressing the existing issues. This summary can aid in understanding existing systems and suggest new methodologies.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Thanks to recent improvements in medicine and health care, the average lifespan of a person is now over 80 years. Therefore, it is anticipated that a greater proportion of people will require additional care. For instance, according to studies by the NPHCE, by 2025, 12% of India’s population will be elderly, with 8–10% needing the highest level of care. Globally, the number of old persons living alone has been increasing [1]. The World Health Organization (WHO) estimates that every year, 28% to 35% of people over 65 experience a fall. The percentage rises even more for those over 70, reaching 32–42% [2]. To lessen the effects of falls, experts in the medical and technological fields have been working for more than 20 years to improve treatment after falls and reduce response time. One of the deadliest events that may happen to an aged person is a fall. The best choice is to employ a nurse or caretaker to keep a close eye on the elderly person’s daily activities (activities of daily living, or ADL). Elderly people or their families will pay a high price for the caregiver option, and it will also be challenging for caretakers to constantly monitor and assist the elderly. A dependable, inexpensive, and intelligent fall detection system should also be considered to aid the elderly, particularly those who live alone or cannot afford to pay a substantial amount of money [3].
1.1 Fall Risk Factors
A fall occurs whenever someone struggles to maintain their balance and stands up straight. A young person has the stamina to right themselves when they lose their footing but when an elderly person does the same, it is much harder for him to do so because he is physically much weaker at that age. The fall could be caused by a variety of factors. Risk factors for falls refer to all potential contributing factors to falls [4]. In reality, the occurrence of falls is the result of a complex interplay between various factors. It is important to comprehend the potential risk factors behind elderly fall risks. With a deeper understanding of these risk factors, a more effective fall prevention system can be designed. Many factors in biology, behavior, demography, and the environment can cause falls (Fig. 1) displays a list of risk elements that have been discovered by research. A patient or elderly person falling might have many factors. The most frequent causes of falls include physiological problems and falls from the bed [2]. Behavior-related risk factors are connected to people’s thoughts, feelings, and routine daily activities. Through strategic intervention, these factors can be under the person’s control. For instance, if a person falls because they abuse drugs or alcohol excessively, this routine or behaviour is modifiable through strategic intervention. Environmental risk factors originate from a person’s immediate surroundings. Cracked pathways, uneven surfaces, and inadequate lighting are some of the primary environmental risk factors. A person’s physical condition, gender, and age are all biological risk factors. Several biological risk factors consist of chronic and acute diseases, diabetes, cardio-vascular ailments, eye impairments, balance issues, and high or low blood pressure. Age and gender are biological variables that cannot be changed, but diseases can be lessened or controlled with the right medical care, and physical health can also be enhanced [4].

Control Flow Model of Fall Risk Factors
1.2 Types of Falls Fall
Up until the 1990s, categorizing fall was a significant problem. The largest obstacle was a lack of agreement among researchers. The majority of the classification at that time was based on the causes of falls. Depending on the position preceding a fall, there were three (other categories of falls also shown in (Fig. 2) main categories of falls:
-
1.
Fall from Bed
-
At the time of the fall, the person is lying in bed either sleeping or not.
-
From bed height to floor height, the body height decreases. The body typically experiences what feels like a free fall motion at that time.
-
The body is in a position on the floor that is close to the bed.
-
The entire procedure occurs in a series of smaller activities over the course of 1–3 s.
-
-
2.
Fall from Sitting
-
At the start of the fall, the person is sitting on a chair or another piece of furniture approximately at the same height.
-
The head descends in a free fall fashion until its height is reduced to the floor.
-
The body is lying close to the chair in this position.
-
The falling process is divided into 1–3 s sub-actions.
-
-
3.
Fall from Walking or Standing.
-
When the fall begins, the person is either standing or walking.
-
The head lowers itself to the floor while lying on it from a level that is equal to the person’s height. It might move slightly while lying.
-
Typically, the fall is unidirectional.
-

Other Categories of Falls
1.3 Method for Fall Detection and Prevention
Researchers have created a variety of technologies to recognize and stop elderly people from falling. Different things have been done to deal with the problem of older people falling. These techniques combine machine learning, IoT devices, image software, etc. Fall prediction is the process of continuously monitoring an older person with wearable or non-wearable devices to determine whether they are likely to fall and how likely it is. However, the focus of fall prediction is on identifying risk factors of fall. It requires very precise and rapid prediction mechanisms. A precise prediction will greatly aid in protecting elderly people from the consequences of falls, even though it is not simple to achieve. Finding out that a senior has fallen is the first step in the fall detection process, after which an alarm signal is sent to alert medical personnel to the situation. Several situations, such as getting up from a chair, standing, bending down to pick something up, etc., could create the impression that you fell. The system must be able to distinguish between actual falls and normal daily activity and immediately alert the designated individuals or locations after making this determination. After a fall, assistance should be sent to elderly individuals as soon as possible to reduce any negative effects [1,2,3].
1.4 Detection of Fall
There are three basic kinds of fall detection techniques: wearable devices, camera-based devices, and ambiance devices.

Fall Detection Devices
In (Fig. 3), the classification of fall detection approaches is shown. In the wearable device strategy, individuals who are at risk of falling must wear some wearable devices or clothing. These devices gather data based on the movement or posture of the body, and a processing algorithm determines whether a fall has occurred or not. However, wearable technology appears to some users to be very intrusive and a burden. They do not bother to wear a device constantly. A problem with the device’s placement is also present. Some activities, like sleeping and moving around, could move the device from its initial position, resulting in less precise results [2]. Some of these problems appear to be resolved by the camera-based strategy. The cameras are positioned in specific areas to enable passive, continuous monitoring of the elderly. Contrary to sensors, the camera allows for the evaluation and analysis of multiple features. When cameras were more expensive, these types of systems were initially less desirable. These devices can also record the data they collect for later analysis and use as a resource. Installing some sensors near the related people, such as on a wall, bed, floor, etc., is part of the ambience device approach. These sensors gather data, which is then used as input by an algorithm to determine whether or not there has been a fall. As a result, the caretakers are informed about the occurrence. Because no sensor needs to be worn, that person is unconcerned about any kind of overhead.
1.5 Fall Prevention
It is impossible to completely guarantee and achieve the goal of preventing falls in elderly people. It can be utilized as a task to ensure that the targeted individual is in a low-risk area. It is carried out by regularly checking on the status of recognized fall risk factors and conducting continuous monitoring. If the obtained values for those parameters fall within the acceptable range, the targeted individuals may be thought of as being in the safe zone. The following are some of the exercises that can be done to prevent falls:
-
Check to see if they appear to be having trouble getting up from a chair or walking in general, or if they are holding onto walls or anything else while doing so.
-
Discuss their medication.
-
Talk about their present state of health.
-
Maintain regular eye and eyewear examinations.
2 Background
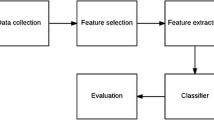
Due to the weakening of body parts that comes with age, falls are common among people of all ages, not just the elderly, who can suffer from unexpected falls. Falls can cause fractures, concussions, and even death in the worst-case scenario. Because of this, falls have recently been the subject of in-depth research, and several automation techniques are being investigated to detect and analyze them. Utilizing the most recent methods for the automated detection of falls is becoming more and more necessary and uses machine learning approaches [5]. The system can learn based on the dataset thanks to machine learning (ML). Throughout the data collection procedure, sensors offer information associated with different fall parameters. Classify or categorize fall activities based on application criteria, the data is processed using ML algorithms. The most popular machine learning (ML) algorithms for preventing and detecting falls are K-Nearest Neighbour (KNN), Artificial Neural Network (ANN), Support Vector Machine (SVM), Convolution Neural Network (CNN) Random Forest (RF), Naive Bayes (NB), Recurrent Neural Network (RNN) etc.
3 Literature Survey
3.1 Related Works
Aactivity of human recognition has become a popular area of study as a result of the widespread use of technologies for human-computer interaction, behavior detection, and other related tasks. Regarding the detection of human falls using a variety of methods, a sizable number of reviews have been conducted.
3.1.1 Cell Phone-Based Approaches
It is simple to determine how likely it is that someone will fall with the aid of a smartphone and a accelerometer. In reality, using an accelerometer to track a person walking as an object is less expensive. In addition to the recommended effort, the authors defined gait symmetry and stability under acceleration data circumstances. The stability and symmetry of an Individual’s gait might be examined using the suggested evaluation models. The suggested methodologies might accurately detect falls.
Shipkovenski et al. [3] proposed an elderly fall detection system. The primary objective of that system is to quickly summon medical help for a fallen senior citizen. The system detects falls during routine daily activities to keep track of human body movements. The proposed system makes use of a three-axis accelerometer, which is a feature of some smartwatches and contemporary smartphones. An accurate acceleration sensor is typically used in portable fall detection devices. A GPS module is present in the majority of smartphones, and it can be added to portable devices. In the absence of a GPS module (Fig. 4) on the smartwatch or portable device, it is possible to connect to the smartphone’s GPS module. The mobile phone serves as both a tracking device and an Internet gateway in such a situation. Their system uses sensor nodes, which can be either wireless controllers with acceleration sensors or smartwatches. Mobile phones with integrated sensors and positioning modules can detect falls. The mobile phone serves as both an independent sensor node and a gateway with GPS. Two sensor nodes can be placed in two different algorithm operation cases at different locations, and 2 fall detection strategies can be combined while comparing the accelerometer data from the two sensors to achieve high reliability.

Fall Sensing Using Smartphone
The proposed fall algorithm uses the data from each sensor node’s accelerometer, and if someone falls, a database receives the fellers location information. Wi-Fi or Bluetooth are used to wirelessly connect the smartwatch to the smartphone. Separately, the smartphone is similarly connected to external controller with sensor. By relaying data through a single smart device, it functions as both an independent sensor node and a gateway. Falls are detected by using the sensors (external ISM6DS3, GY-521 on a Huawei smartphone, or bma on a nokia smartphone) and use the proper algorithm to post-process the input variables. When an occurrence has to be reported, the mobile device transmits the database its GPS coordinates. It is also optional to phone or text a caregiver for the elderly to inform him of the event’s location. It analyzes the input data from an accelerometer using a powerful algorithm and notifies caregivers automatically of the location of the fall. The proposed system’s accuracy in detecting falls can reach 100%, according to test results performed by seven volunteers 5 men and 2 women among the ages of 20 and 24, as well as two seniors, 65 and 72, were used in the experimental testing. The volunteers periodically mimicked spontaneous falls while wearing the devices on their wrists, chests, and thighs. The majority of the ADL data was gathered during the experiment by the more youthful volunteers, who attempted to emulate the motions of the adults and executed various falls and ADLs, with the elderly volunteers recording a much smaller portion of the ADLs.
Vallabh et al. [6] this study used the MobiFall dataset to identify and differentiate between fall activities and daily living activities. The dataset was collected using a phone that was kept in the user’s pants pocket. The dataset includes standing, jogging, walking upstairs, walking down stairs, jumping, and sitting in a chair. The model was trained and validated on a sizable database. The use of feature selection techniques helped to reduce dimensionality. A fall detection classification system requires feature extraction because the chosen features will affect how accurate the system is. Data from a window interval is typically used for feature extraction. A set of values can be created in the window and then used to extract a special feature. The SMV explains alterations in human movement and the detection of potential falls. The window interval is then created using the threeaxis maximum peak as a reference point. Numerous studies indicate that the window size can range from one to seven and a half seconds, but for it to be uniquely identified, it must have at least one cycle of a single activity. In related research, the window interval of 4 s, with 2 s coming before and 2 s coming after the maximum SMV peak, was found to be the best. This enables the gathering of fall data from the impact’s beginning and end. Two features were derived from the SMV data and the remaining 36 features were derived from the frequency domain (six features x three axes of the accelerometer) and time domain (six features × three axes of the accelerometer). The window interval saw the features being extracted. Applying the formula based on unity, all features were normalized within the 0–1 interval. All data can be treated equally, thanks to normalization, which also lessens bias and variance. Before establishing a window interval, each activity record calculates the time index of the largest SMV peak. The implementation of five different classification algorithms (KNN, LSM, Naive Bayes, SVM, Naive Bayes and ANN) was assessed for sensitivity, accuracy and specificity. Overall accuracy for the KNN algorithm was 87.5%, with sensitivity at 90.70% and specificity at 83.78%.
Despite the fact that research into the use of smartphones as fall-detection devices is still ongoing, there are some restrictions like
-
It is questionable whether the quality of cell phones’ internal sensors is sufficient to accurately detect falls. Smartphone accelerometer sensors can measure up to 2 g of dynamic range, but a fall detection device needs to measure dynamic ranges of 4 to 6 g (1 g = 9.8 m/s2) [1, 3].
-
When smartphones are used frequently, their short battery life (only a few hours) is a major concern. According to previous research, using three sensors simultaneously causes the battery consumption to increase by more than twofold. Although using the power-saver mode seems like a real solution, performance would be significantly decreased [2].
-
Smartphones were not developed and designed to detect falls. Accuracy is compromised when used in real-time due to various compatibility and operational issues [2].
-
Mobility sensor placement has a big effect on how to fall detectors operate.
-
For smartphone-based fall detection systems to function accurately, they must be mounted or placed in an unusual location, usually on the wrist or chest [1, 6].
3.1.2 Ambience Devices Based Strategies
While using an ambience device, a variety of sensors are positioned throughout a person’s residence, such as on the wall, the floor, the bed, etc., to track their movements. These sensors gather data, and an algorithm uses that data to figure out if there has been a fall or not. If those sensors identify a fall, the monitoring service alerts the caregiver.
Hussain et al. [4] in contrast to the most recent and cutting-edge methods, the proposed algorithm (Fig. 5) detects falls with high sensitivity, specificity, and precision. The proposed methodology employs a dataset accessible to the public for training and evaluation of the algorithm that will be used to determine whether an activity is falling or not. The proposed methodology starts with gathering the data that will be used in later steps after pre-processing. Collecting data from people in real time, especially from elderly people who are performing tasks, is a very difficult task. Numerous researchers have gathered information on fall activities and everyday activities. Various datasets are available, but the majority of them only include young participants performing activities. The system that detects elderly falls to be effective, the elderly’s falls and daily activities must be included in the dataset. As a result, they chose the SisFall dataset, which includes participants of all ages.

Proposed Methodology
The SisFall dataset consists of more than four thousand files, of which more than seventeen hundred files contain fifteen different types of falls and two thousand seven files contain nineteen different ADL types performed by twenty young, adults ages nineteen to thirty and by 15 adults ages sixty to 75. Mounted at the participant’s waist, a wearable device with 3 sensors for motion 1 gyroscope and 2 accelerometers is used to record all activities at a 200 Hz rate of sampling. The next step after data acquisition is pre-processing, which involves removing unwanted noise from a signal in order to improve the performance of machine learning classification algorithms. The frequency of a fourth-order low-pass infinite impulse response (IIR) cutoff point butter worth filter of 5 Hz was used for this methodology because it is simple and computationally affordable compared to other filters. Each characteristic is then extracted from the data of three sensors two accelerometers and one gyroscope along the three axes. For a single sensor, the size of a feature is [one (number of samples) × one (number of features) × three (number of axes)]. Each sensor’s size is therefore [one (number of samples) × six (number of features) × three (number of axes)] for all six features and all three axes. For a single sample, = [one × eighteen]. As a result, they produce a final feature vector with dimensions [one × fifty-four] for all three sensors along with one sample on all three axes. Four machine learning classifiers are trained and tested using the extracted features. SVM is the classifier that performs with the highest accuracy, at 99.98%, outperforming cutting-edge techniques. The proposed algorithm can be successfully applied to a fall detection system operating in real time.
Ayush Chandak, Nitin Chaturvedi, and Dhiraj [5]. Two methods for fall detection were presented (Fig. 6). In this paper, one is contact-based, and another is non-contact-based. For contact-based fall detection systems, use the UP-fall dataset. In this instance, the triaxial accelerometer’s data was used to predict both falls and non-falls. Two three-axial accelerometer sensors were placed on the right wrist and pocket of the patient to resemble a watch and a mobile phone, respectively. The accelerometers are placed in close proximity to the person. Making it very institutional for automated detection to predict falls using them. For this, 1D CNN-based techniques and machine learning architectures were used. First, to capture the fall and non-fall parts accurately, The accelerometers’ 3-axial data was condensed to 3 s.

Presented Method
To standardize the data, the mean was subtracted from the data points, and then the standard deviation was used to divide the data points by the difference. The normalized data was then extracted, and 1.5 s of continuous fixed arrays were added one by one in third-dimension order. Using the collected flow stacks, the classifier (ML models and oneD CNN) was used to forecast the arrival of fall. The dataset was split into two parts: 30% for testing and 70% for training, and In terms of every performance metric, the RF method outperformed every other machine learning technique. According to the results, the sequential data provided by the accelerometers can be significantly enhanced by ML techniques. They also tried the 1D CNN approach to boost the performance. Data streams are passed through 1D CNN after being transformed into 1D arrays and trained on numerous 1-dimensional layers. 500 training epochs were completed using a respectable gradient optimizer with a 10.4% learning rate. The accuracy achieved was 98.07%. In the noncontact-based fall detection method, predicting the fall and non-fall events used RGB camera recordings taken from the subject’s frontal and lateral sides. Additionally, optical flow images were created using RGB images. Since optical flow images only record the motion between consecutive frames, they are useful for removing background noise. The camera recordings from the UP-Fall dataset were utilized as the data input. Videos were recorded at 18 frames per second from the subject’s front and lateral sides. It involved 17 participants completing 11 tasks over the course of three trials. The images’ resolution was decreased from 640 to 480 to 224, 240 to minimize computational costs. In addition, the recordings were condensed to 50 frames per recording because this is the minimum amount of time needed to distinguish between a fall and a non-fall event. The data set was further divided 80:20 into training and testing sets for VGG-16, DenseNet, and Xception architectures. The batch normalization method was used with ReLU as the e-learning rate was set at 10–6. 500 epochs were used to train the network. As can be seen, DenseNet performed better than other architectures, with accuracy rates of 99.85% for frontal camera recordings and 98.41% for lateral camera recordings.
Koichi Toda and Norihiko Shinomiya [7]. The main goal of the system shown in (Fig. 7) is to get rid of the need for the user to wear extra gadgets. Indoor footwear is tagged with passive sensor tags as a fall detection technique. The advantage of using battery-free sensors is that elderly individuals can engage in activities without restrictions or concern for damaging the sensors. Passive RFID tags necessitate no maintenance, so the suggested footwear can be worn continuously. To identify the activities, Using machine learning techniques, The system under consideration assessed RSSI values and sensor codes acquired from passive sensor tags. The inability of the footwear-based system to track upper-body activity is one of its drawbacks. As a result, not all types of daily activities are taken into account in this study. The suggested system keeps an eye on routine daily tasks (walking, standing, and falling). The proposed system makes use of passive RFID sensor tags made of RFMicron’s Magnus S chip, which measures pressure in addition to RSSI.

Suggested System
These tags are used in the strategy to measure changes in during activity, the RSSI and pressure values by attaching them to indoor footwear. To characterize activities, feature extraction is crucial. When the classification system is trained on raw sensor data, it often has difficulty distinguishing between activities. In this study, a one-second sliding window method, which is equivalent to 10 samples, is used to recover several attributes from the RSSI values and Sensor Code of every tag. Features are taken from the raw data and used to classify the activities using machine learning. The experiment demonstrates how passive sensor tags with pressure features can perform better for classifying daily life activities. Two volunteers served as the subjects and naturally engaged in each activity. Subjects A and B engaged in the three activities of standing, walking, and falling for 600 and 300 s, respectively. Subjects A and B performed each activity 40 times and 20 times, respectively, with each trial lasting 5 s and varying the location and orientation. Additionally, according to their research, the proposed method for the random forest algorithm can generate F-measure scores of ninety % and ninety-four %, respectively.
Bhattacharjee, Pratik, and Suparna Biswas [8]. This research implements a fall and posture detection system using low-cost sensors and machine learning, which can assist those in need both indoors and outdoors. This sophisticated system can distinguish between falls that result in recovery and those that do not within a predetermined timeframe. If a fall occurs and no one recovers, a message is sent to a relative or caregiver with the location, time, and date of the fall. This function ensures real time support to prevent potentially critical delays. Additionally, a person’s last known posture before a fall is also reported to determine his propensity to fall from a particular posture. This could help medical professionals take the necessary precautions to avoid falling in the future. The proposed SWA system includes a fall detection module that performs both fall detection and on-the-spot audible warning generation as a separate module. It uses the moving average filter to normalize the unprocessed live 3 axis accelerometer data. Min and max threshold values are used to detect the fall. Utilizing a method dependent on SVM to confirm the fall and analyzing the duration and threshold values, the module can ignore falls and fall like cases (such as fastsitting, stumbling, sudden increases in walkingspeed, etc.). The module only issues a warning if the subject is unable to recover on his or her own. In addition, the Posture Identification Module (PIM) combines live data from the MPU6050’s three-axis accelerometer and three-axis gyroscope by using a supplementary filter. The data is then evaluated using RF ML algorithms to assess the subject’s posture and compared to 20,000 training data points for each action. Based on mixed-age volunteer data from Indian men and women between the ages of 10 and 15, 20, 30, 35, 50, and 60, who each performed four activities—walking, standing, sitting, and lying—the training set was created. Considering the SVM, KNN, Decision Tree and Random Forest were used as four different classifiers to test the module, and It was determined that RF performed the best, with a 99% total accuracy rate. The posture is updated once every 20 s. These data points were used to train the module KNN (with K = 3) and Random Forest (with K = 3) generated the greatest recognition outcomes for the 10 unidentified individuals who are also local users As output, the identified posture is sent. The live fall detection system in this instance catches the final posture maintained before falling. No alarm message is provided in the case of a fall and subsequent recovery. However, if a person falls and is unable to get up, a message of alert is sent to a family member or caregiver, asking them to come to the distressed person’s aid right away. Now, MPU data and its accurate analysis are what determine how accurate the entire system will be. If the sensor data leads to an incorrect identification, a false alarm may be triggered and prompting people to rush to the subject’s location. A false alarm may be activated, causing people rush to the location of the subject.
Palmerini, et al. [9]. Developed and evaluated fall detection algorithms with characteristics derived from a multiphase fall model and a ML strategy by analyzing acceleration signals obtained from 143 actual falls by 40 subjects from the FARSEEING repository, which uses an inertial sensor. There was always at least a triaxial accelerometer in the inertial sensor. The sensor position was the subject’s lower back, and the average fall risk for these subjects was calculated using the FRAT-up tool. They used 27.5-s windows with a one-second step, which provides a set of 26.5-s CFW (candidate fall windows) for additional analysis. One second is added to the CFW for the overlapping window. In this extra second, a peak search is conducted to make sure that there are always enough samples for CFW, thus introducing a new overlapping window technique is introduced. To assess the effectiveness of the classifiers, they used subject-based cross-validation. Five-fold cross-validation was chosen by them. To prevent dependencies that could reduce the generalizability of the findings, we avoided using dependent variables, subject-based cross-validation was used to limit the data (including the adl & fall) from a single subject to a single specific fold (among the five). This assures that while training with four of the five folds and testing with the fifth fold, the results will be the same, Data from participants in the testing fold are contained solely in the testing fold, therefore minimizing any overfitting. To account for individual differences in the number of falls and ADLs, the cross-validation was also stratified. Within each cross-validation fold, stratification was performed to ensure an even distribution of individuals with low/high falls and low/high ADLs. Based on the number of their ADLs compared to the median of the group, the subjects with ADLs were categorized as low or high, and the data for a subject (ADLs and, if available, falls) were arranged in a single fold and proportions of the two groups in each fold were balanced. Based on the number of falls, the remaining participants (fall without ADL) were separated into two groups (low/high number of falls) and stratify them into five subgroups, ensuring that the proportions of the two groups in each subgroup are equal and that each subject belongs to a single subgroup. They used a variety of classifiers to combine the data from all features. They used the fitting Matlab function for NB. The logistic regression Matlab functions are glmval and glmfit, and the standardized features for KNN are the fits knn Matlab function and its three closest neighbors. They chose 20 trees for random forests and using the TreeBagger function and the regression method, the area under the curve was calculated (AUC). A sensitivity higher than 80%, the vector support machine calculated a false alarm rate of 0.56 per hour and features from the multiphase fall model.
Badgujar, Sejal, and Anju S. Pillai [10] this research offers an elderly-wearable sensor-based fall detection system. The suggested technique leverages methods for ML to identify falls from a list of common activities. Due to pre-trained gait patterns, ml techniques are found to be superior to the threshold method because they produce fewer false alarms. The system identifies falls by classifying various actions as falls or non-falls and notifies a family member or other caregiver in the case of an urgent situation. To compute the features of the SisFall dataset, they use SVM and DT machine learning algorithms. SVM is an algorithm applicable to both regression and classification problems. To provide good separation, SVM identifies the hyperplane that is furthest from the closest training data point of any class. It may be possible to locate a hyperplane using a kernel function to determine the classification of a non-linear dataset. On each side of the plane, several sorts of data points are spread. The decision tree represents data as a tree, include nodes and edges. Trees consist mostly of the root node, internal nodes, and leaf nodes; however, actual datasets contain additional characteristics. The decision tree is a strategy for classifying data with a limited number of classifications. Once the training data for the tree has been prepared, decision rules are drawn and classification decisions are made using those rules. The popularity of decision tree classification models is due to how simple they are to interpret and how straightforwardly the outcomes can be comprehended. Decision makers can interpret the problem’s solution thanks to the DT algorithm, which simplifies complex decision-making processes. Based on computed features, ml algorithms such as SVM and DT are used to identify falls. Sensitivity, specificity, accuracy, and confusion matrix are some of the criteria used to evaluate the models. The system uses the DT algorithm to achieve an accuracy of up to 96%. Compared to SVM, the DT is more accurate because it can precisely define and classify each attribute for each class. Additionally, SVM has a longer prediction time than a decision tree, which makes the system slower.
Syed, et al. [11] in this study, a fall detection and activity monitoring system that takes into account human motion was developed. The suggested plan adheres to a standard framework for deep learning solutions. First, windowed segments are extracted from the inertial sensor data from the IMU sensors used in the SisFall dataset. Next, data augmentation is conducted for minority classes, followed by feature extraction and classification. After the necessary data augmentation, raw sensor measurements must be appropriately processed prior to the IMU sensor data utilized for Fall and ADL detection. In this study, data pre-processing was divided into two steps: first, From the IMU recordings, uniform-sized windows are extracted, and then the data is improved. The extracted windows of the classes under consideration for noise augmentation were supplemented with white noise of Gaussian. With a standard deviation of 0.01, the noise was generated. The inclusion of noise simulates measurement noise that may be present while recording in IMU-based fall detection systems. A random number drawn at random from a uniform distribution between 0.8 and 1.2 multiplied the original extracted window for scale-based augmentation. This enables the inclusion of amplitude fluctuations across the same kind of activity or fall. The proposed CNN needs to be trained appropriately before it can be used for feature extraction. Added a totally connected layer with SoftMax output at the very end to act as the network’s temporary intermediate output determining step. The SisFall dataset’s windowed data was divided into three groups for training, validation, and testing. Using stochastic gradient descent with a learning rate of 0.01 and a batch size of 20, the network was tuned. The average recall score across all classes, also known as the UAR, was the additional chosen metric. Recall is considered because the system should accurately categorize as many positive samples for each class as possible. Early pausing was used in the design of the final network. After conducting data augmentation on the minority classes, the CNN network received data from the training set. During training, the validation set was used to monitor the performance of the network and select the top-performing instance. After training was complete, In lieu of the final fully linked classification layer, an XGB classification step was implemented. The CNN network layers were loaded using the weights of the CNN model with the highest performance, and the input samples were again passed through them to train the XGB stage. Using the XGB’s input as the output of the CNN stage. Six types of falls were created as a result: Hard and soft in terms of impact, and forward, backward, and lateral in terms of direction. These include Lateral Hard Fall (LHF), Lateral Soft Fall (LSF) Forward Hard Fall (FHF), Forward Soft Fall (FSF), Backward Soft Fall (BSF), and Lateral Hard Fall (LHF) to more clearly demonstrate the falls’ labeling procedure. According to the experiments, the gradient boosted CNN outperformed other methods of a similar nature, achieving an unweighted average recall of 88%.
Miawarni et al. [12] this paper uses SVM to define an FDS work. They used the eHomeSeniors dataset, which uses Omron D6T-8L-06 and Melexis MLX90640 sensors. Unlike other types of sensors like accelerometers, both sensors are affordable, they do not need to go through a laborious calibration process. Omron D6T-8L-06 can gauge an object’s surface temperature. This sensor, which has an 8-channel sensor array, produces thermal images with a resolution of 1 × 8 pixels. This sensor is used to identify humans in the eHomeSeniors dataset. MEMS Thermal sensors are superior to traditional pyroelectric sensors in some ways. Based on the premise of detecting fluctuations in the human body’s infrared light intensity, pyroelectric sensors can detect human movement. Nevertheless, if there is no movement, the signal for detecting will be lost. The Melexis MLX90640, which employs an infrared thermal sensor which is more sophisticated sensor than the OmronD6T-8L-06. This sensor is a 768-channel FIR (far infrared) sensor array that generates thermal pictures at 32 × 24 pixels and 16 frames per second (frames per second). This sensor can detect objects with temperatures ranging from −40 to 300 °C. Using SVM, they develop unique deep learning algorithm technique and apply them to this dataset (16,261 instances and 33 fall simulation attributes) in an effort to improve the sensor resolution’s ability to distinguish human actions. To get the best results in capturing falling incidents, this dataset included more than 15 categories of falls. Additionally, they changed the gamma value without the need for normalization or standardization from the default value of 0.01 to 0.9. Additionally, Training and test data are separated 50:50, 60:40, 70:30, 80:20, and 90:10 respectively. Using a 90:10 data split, they were able to get 84.62% accuracy and 50.32 s of learning runtime.
3.1.3 Ambience Devices and Cell Phone-Based Approaches
Ramachandran, et al. [1] suggested a fall detection system that considers a subject’s biological and physiological profile in addition to various wearable sensor node parameter readings. They conducted tests to see how detection accuracy varied when subjects were assigned to risk categories or not. They made use of the UMA ADL FALL Dataset, which includes information on almost 2 lakh incidents of falls and near-falls. To collect the data, about 17 people wear smartphones equipped with accelerometers, gyroscopes, and magnetometers on their wrists and chests. After data preprocessing, vector acceleration magnitude and angular velocity were employed as input characteristics. During the first phase, they tested the effectiveness of several algorithms for identifying and categorizing falls in forward, backward, and lateral directions and during typical activities such as bending, walking, jogging, sitting, and laying down. The likelihood of each component was used to get a normalized, weighted score for each topic. In the second stage, a risk category parameter was added to the sensor data previously collected. Based on their prior fall histories, The subjects were split into three groups: high-risk, medium-risk, and low-risk. These organizations gathered the fall data necessary to train the machine learning systems. The performance indicators were compared after the dataset was used to retrain several ML algorithms, this time with the inclusion of a parameter for risk category. They ran Naïve Bayes, kNN, ANN, and SVM classifiers. The kNN algorithm gives accuracy of 82.2%. For the second phase, It was discovered that including the risk category parameter into the feature set increased fall detection accuracy by 84.1%.
Chelli, Ali, and Matthias Pätzold [13] in this study, they develop a framework for machine learning that can identify daily activities and detect falls. Two public databases provided triaxial angular velocity and acceleration information. Six different types of activities are included in the first database: walking upstairs, walking, sitting, walking downstairs, lying and standing. This experiment involved Thirty participants in total. The participants’ waists were fitted with a smartphone that was used to record their acceleration and angular velocity information. The gathered data were sampled at a rate of fifty Hz. These organizations gathered the fall data necessary to train the machine learning systems. Each data buffer includes the participant’s tri axial acceleration and tri axial angular velocity as well as a label for the corresponding real-world activity based on ground truth. They got acceleration and angular velocity data for fall events from a public database in addition to the ADL data set; hence, the classification system includes acceleration and angular velocity signals in their raw form as inputs. In order to solve this issue, a collection of characteristics must be derived from the acceleration and angular velocity data, since the activity identification accuracy in this situation is relatively poor. For various activities, these features ought to fall into different value ranges. During the training phase, a considerable quantity of labelled data is presented to the classification algorithm. The value range for each feature for each activity must be learned by the classification algorithm. Using a updated acceleration and angular velocity data, the characteristics are extracted, which are then stored in a feature vector and sent to the classification method. The trained classification algorithm classifies this feature vector into one of seven activity types. The collected characteristics significantly influence the accuracy of this categorization. They extract time and frequency domain information from acceleration and angular velocity data and feed these features to four distinct classification methods, i.e., the ANN, KNN, QSVM, and EBT. According to their findings, the overall accuracy of the ANN, KNN, EBT and QSVM algorithms was 87.8%, 81.2%, 94.1%, and 93.2%, respectively. For the QSVM and EBT algorithms, respectively, without any false alarms, the fall detection accuracy reaches 97.2% and 99.1%. They improve the classification accuracy in a subsequent step by extracting features from the acceleration and angular velocity data’s autocorrelation function and power spectral density. They were able to achieve overall accuracy of 91.8%, 85.8%, 97.7% and 96.1% for the ANN, KNN, EBT, and QSVM algorithms, respectively, by utilizing the proposed features. The QSVM and EBT algorithms’ fall detection accuracy is 100% with no false alarms, which is the highest possible performance.
Wisesa, I. Wayan Wiprayoga, and Genggam Mahardika [14] made an algorithm that uses sensor data from an accelerometer and gyroscope built into a wearable device to tell the difference between a fall and other ADL. To analyses the sequence of time series data from sensors, they make use of LSTM as part of a RNN. The algorithm for AFDS was created using the UMA Fall Dataset. 746 samples of data from a variety of test subjects are included in the UMA Fall Dataset. Five different types of wireless sensor nodes were implanted in the subject’s body during the experiment, one of which contained a smartphone and 4 sensor tags. Smartphone contains the sensors, which are also fastened to the wrist, ankle, waist and chest (for all 4 sensor tags). Utilizing the Bluetooth communication protocol, all 5-sensor nodes transmit triaxial accelerometer, triaxial gyroscope, and magnetometer data. Currently being tested are two different types of movement scenarios: ADL (Activity Daily Life) and falling. There are 12 sub-scenarios for the ADL scenario, including applauding, making a call, raising hands, sitting, opening a door, and standing up from a walking, chair, hopping, bending, when supine on a bed, jogging, going upstairs and going downstairs. There are three distinct types of falls: lateral, forward, and backward. From their respective official Internet pages, the dataset is freely downloadable. The data is stored in CSV files. Each CSV file, which can be recognized by its filename, contains a sample from a single subject, completing a single scenario. Each CSV file comprises (triaxial) accelerometer, gyroscope, and magnetometer data from the subject’s body parts for all five recorded subject motions. Their experiment is divided into two scenarios. The first scenario uses their LSTM model to categorize the data from each tri-axial sensor accelerometer and gyroscope. This hypothetical situation aims to shed light on the characteristics of each sensor’s data so that falls can be predicted. To comprehend the influence of merging all sensor data on categorization performance, in the second scenario, they made an effort to combine all sensor data so that it could be classified by the LSTM model. Utilizing data from X-axis accelerometers, their test shows that they were successful in classifying the UMA Fall Dataset.
3.2 Comparative Study
Researchers found that using a cell phone’s inbuilt sensors, like a three-dimensional accelerometer and gyroscope, can be used as a straightforward system for predicting falls. Ramachandran et al. [1] suggested a cell phone-based fall detection system with risk categories based on an individual’s health profile. For risk categorization, they chose 23 biological parameters that were most important and used their odds ratios to figure out how likely it was that a sample dataset would fall into each category. They discovered that ordinal logistic regression had higher fall detection accuracy. They assessed how well other algorithms performed with a risk category as an input feature vs without it. Found that KNN provides the most accurate results and that incorporating the risk category improves accuracy. Similarly, Hipkovenski et al. [3] as a prototype for a system to detect falls, they employed sensor nodes with a triaxial accelerometer, Bluetooth, GPS and Wi-Fi from a smartphone. Seven young people conducted the test using 10 pieces of hardware and a mobile software program that displays good accuracy. Compared to previous accelerometer-based algorithms used in other studies, this technique is superior, the proposed algorithm produces better results. Just like the 2 papers by Chelli, Ali, and Matthias Pätzold [13] and Vallabh et al. [6] used the publicly available dataset to study, with the aid of cell phone-based approaches to identify and make a distinction between fall and daily living activity. In this work [6], five different classification algorithms Naive Bayes, KNN, ANN, SVM, and LSM were implemented. They got highest accuracy of 87.5% using the K-Nearest Neighbors algorithm, with a sensitivity of 90.70% and a specificity of 83.78%. In the paper [1], they identify and differentiate fall from daily life activity using mobile phone-based techniques using risk categorization. Nonetheless, the subject’s health profile that is utilized as input for risk classification might be expanded. However, in the paper [6] they only utilized five categorization strategies. Use of accelerometers and gyroscope sensors, solitary or in pairs, has been favored by researchers. In addition, a number of other sensors are installed close by the related individuals, such as on a floor, wall, bed, etc. These sensors collect data, and the algorithm uses that data as input to determine whether or not there has been a fall. This is called The Ambience Device Approach. In other studies, the desired sensors are connected externally. Hussain et al. [4] compare the most recent methods and sensor-based strategies. They made use of a collection of computationally effective features that were taken from a publicly accessible dataset. SVM is the classifier that performs with the highest accuracy, at 99.98%, outperforming state-of-the-art methods DT, LR, and KNN. Similarly, Koichi Toda and Norihiko Shinomiya [7] created a method that employs passive RFID sensor tags on footwear for fall detection. The advantage is that, due to the use of battery-less sensors and pressure features, for the dependent and independent persons, the created method can achieve an F-measure of 98% and 94%, respectively, using RF. In this paper, Ayush Chandak, Nitin Chaturvedi, and Dhiraj [5] primarily employed two methods: contact-based and non-contact-based. For contact-based sensors, 1D-CNN and machine learning algorithms were investigated. The proposed 1D-CNN outperformed the ML Contact methods, which provided an accuracy of 98.07%, for contact-based sensors. On the other hand, non-contact-based sensors use 16 layers of VGG-16, providing faster computation with good accuracy. To further improve the accuracy, DenseNet is proposed, and that gives 99.85% accuracy. Bhattacharjee, Pratik, and Suparna Biswas [8] designed and implemented a smart walking system using sensors in the 6050-microprocessor unit (MPU) combined with the low-cost ESP8266 microcontroller unit (MCU) and Wi-Fi connectivity. The system was randomly tested on 10 volunteers and achieved up to 98% detection accuracy. Data was utilized to train and test the suggested approach, which was built using KNN, SVM, RF, and DT classifiers, where RF was found to outperform the others with 98% accuracy. As a result of sensors’ success and quick expansion, the IOT, and ML, etc., data was used to train and test the proposed algorithm. Palmerini et al. [9] analyzed acceleration signals obtained from an inertial sensor to detect the fall. SVM, along with features from the multiphase fall model, emerged as the most effective technique, achieving a sensitivity of over 80%, a false alarm rate of 0.56 per hour, and a 99.3% accuracy rate the method with the best fall detection performance requires less than one millisecond of total calculation time (0.7 ms). Even though two skilled assessors used visual inspection to identify falls, the fall reports did not always match the signal patterns precisely. Hence, it is probable that some falls were misidentified. Similarly, Badgujar, Sejal, and Anju S. Pillai [10] proposed a fall detection system based on ML. On the basis of computed characteristics, falls are detected using ML algorithms such as SVM and DT. Using a decision tree method, the system attains an accuracy of up to 96%. Then again, Syed et al. [11] proposed CNN and XGB fall detection system. An XGB is used for classification in the final stage after the CNN has been trained. From a sensor modalities standpoint, more sensor modalities might possibly enhance performance for the lowest identified classes but still, it achieves 88% accuracy in other hand SVM is used as a Deep Learning model in the fall detection system developed by Miawarni, Herti, et al. [12]. Their gamma-tuned SVM achieves an accuracy of 84.6% as a result. By utilizing an infrared heat sensor, with an AUC-ROC of 95.9%, its SVM exhibited its ability to handle multiclass classification. Also, the training and testing phases of their experiment had relatively brief runtimes, with 308.75 and 50.32. The optimal data split is also 90:10, both before and after changing the gamma to 0.9. Some researchers discovered that smartphones and ambient devices can work together fairly well, so they developed a novel approach for fall detection that uses smartphones as a master monitoring device and ambient device sensors as slave sensors. In the same way that Chelli, Ali, and Matthias Pätzold [13] and Ramachandran, Anita, et al. [1] used both smartphones and imu sensors, [13] in their paper, they developed a framework for machine learning that can identify daily activities and falls. Using acceleration and angular velocity information, they evaluated the effectiveness of four algorithms in detecting various human activities, including walking, climbing and descending stairs, sitting, lying and standing. Using data for angular velocity and acceleration, they evaluated the effectiveness of four algorithms in detecting various human activities, including walking, climbing and descending stairs, sitting, standing, and lying down. This shows that the ANN, KNN, EBT and QSVM algorithms achieved an overall accuracy of 87.8%, 81.2%, 94.1%, and 93.2% respectively. Just like that, Wisesa, I. Wayan Wiprayoga, and Genggam Mahardika [14] using data from the accelerometer and gyroscope sensors, a smartphone for monitoring and controlling the sensors through Bluetooth, and an algorithm for differentiating falls from other ADL.The Python-based keras framework is a high-level framework for deep learning, is being used to implement the LSTM networks. They designed simple RNN networks for the experiment with 1 layer of LSTM cells and hundred hidden neurons. Since their AFDS issue is regarded as a sequence classification problem, they imposed a fixed-length sequence input on the recommended LSTM. Based on the dataset’s maximum number of sequences, 306 features are chosen as the input for the LSTM cell. Sequence data less than 306 used zero padding at the beginning of the sequence. The best accuracy for training was 86.63%, and the best accuracy for validation was 69.10% (Table 1).
4 Observations and Findings
After a comprehensive literature study about fall detection and prediction, many findings have been made. After a thorough study, some limitations are found in existing models that can be used as future research domains; this is the research gap. Those loopholes are listed as follows:
-
Camera-based methods are expensive and require a huge amount of data to store and process. This is a very complicated method of working and requires a more powerful GPU and CPU.
-
Along with the benefits, camera-based systems have certain drawbacks, like privacy concerns and the inability to follow beyond the camera’s field of view.
-
Smartphones are not designed to work with wearable fall detection equipment. While smartphone accelerometer sensors can measure dynamic ranges of up to 2g, a fall detection device needs to measure dynamic ranges of four to six g (one g = 9.8 m/s2).
-
Since smartphones only have a limited amount of battery life, using their sensors, such as the accelerometer and gyroscope, draws more power.
-
Battery consumption is a drawback of using mobile devices, but software optimization will also extend battery life.
-
In this study, it was found that in a mobile-based approach, many algorithms are used, but KNN and SVM give the highest accuracy. Similarly, in the ambience-based approach, CNN and RNN have the highest accuracy.
-
It’s possible that not all falls require the assistance of emergency personnel. Similar problems can be resolved if they take proactive measures.
-
For a medical professional, it might be hard to understand technical terms like power consumption, battery backup, response time, sensor installation, etc.
-
A hybrid strategy that uses affordable wearable and ambient devices would be a good way to deal with the annoying factor.
5 Future Scope
Even though researchers have been studying the causes of elderly falls and ways to predict them for decades, some questions still haven’t been answered. Concerns from a number of governments and reputable organizations, including the WHO, Researchers have become interested in this area because of the rise in fall incidents and their consequences. As technology advances, there are more and more smartphones and wearables available at a low price. As technology develops, more and more smartphones and wearables are becoming affordable. These days, using a smartphone to detect falls is incredibly affordable and accessible due to the fact that everyone has one. Therefore, use its built-in sensors like an accelerometer, gyroscope, magnetometer, and GPS for fall detection. However, there is one significant issue: smart phones are not intended to be used as fall-detection devices. Therefore, those sensors need to be calibrated. Cameras are frequently used for fall detection because it is an excellent strategy and provides high accuracy. However, the camera approach requires a lot of expensive resources and poses some privacy risks. Additionally, not all areas are visible to the camera. Therefore, use of the ambience device approach, which provides the highest accuracy while also being trustworthy and cost-effective, is recommended. A hybrid strategy with two-layer architecture might be developed in the future. The ambient devices in the middle layer and the smartwatch or smartphone on the edge have more potent machine learning algorithms that can detect real-time falls. Additionally, it can determine whether a person is indoors or outdoors and use that information to determine the fall data. While a person is inside rather than outdoors, information from IMU sensors is obtained to determine whether a fall has occurred. If the person is outside, data is collected from their smartphone. If a fall occurs, call for help and also contact emergency services.
References
Ramachandran, A., Adarsh, R., Pahwa, P., Anupama, K.R.: Machine learning-based techniques for fall detection in geriatric healthcare systems. In: 2018 9th International Conference on Information Technology in Medicine and Education (ITME), pp. 232–237. IEEE (2018)
Tanwar, R., Nandal, N., Zamani, M., Manaf, A.A.: Pathway of trends and technologies in fall detection: a systematic review. In: Healthcare, vol. 10, no. 1, p. 172. Multidisciplinary Digital Publishing Institute (2022)
Shipkovenski, G., Byalmarkova, P., Kalushkov, T., Valcheva, D., Petkov, E., Koleva, Z.: Accelerometer based fall detection and location tracking system of elderly. In: 2022 International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), pp. 923–928. IEEE (2022)
Hussain, F., et al.: An efficient machine learning-based elderly fall detection algorithm. arXiv preprint arXiv:1911.11976 (2019)
Chandak, A., Chaturvedi, N.: Machine-learning-based human fall detection using contact-and noncontact-based sensors. Computat. Intell. Neurosci. (2022)
Vallabh, P., Malekian, R., Ye, N., Bogatinoska, D.C.: Fall detection using machine learning algorithms. In: 2016 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), pp. 1–9. IEEE (2016)
Toda, K., Shinomiya, N.: Machine learning-based fall detection system for the elderly using passive RFID sensor tags. In: 2019 13th International Conference on Sensing Technology (ICST), pp. 1–6. IEEE (2019)
Bhattacharjee, P., Biswas, S.: Smart walking assistant (SWA) for elderly care using an intelligent realtime hybrid model. Evol. Syst. 13(2), 265–279 (2022)
Palmerini, L., Klenk, J., Becker, C., Chiari, L.: Accelerometer-based fall detection using machine learning: training and testing on real-world falls. Sensors 20(22), 6479 (2020)
Badgujar, S., Pillai, A.S.: Fall detection for elderly people using machine learning. In: 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), pp. 1–4. IEEE (2020)
Tajammul, M., Shaw, R.N., Ghosh, A., Parveen, R.: Error detection algorithm for cloud outsourced big data. In: Bansal, J.C., Fung, L.C.C., Simic, M., Ghosh, A. (eds.) Advances in Applications of Data-Driven Computing. AISC, vol. 1319, pp. 105–116. Springer, Singapore (2021). https://doi.org/10.1007/978-981-33-6919-1_8
Miawarni, H., Sardjono, T.A., Setijadi, E., Gumelar, A.B., Purnomo, M.H.: Enhancing classification of elderly fall detection system using tuned RBF-SVM. In: 2022 IEEE International Conference on Imaging Systems and Techniques (IST), pp. 1–5. IEEE (2022)
Rajawat, A.S., et al.: Depression detection for elderly people using AI robotic systems leveraging the Nelder–Mead Method. In: Artificial Intelligence for Future Generation Robotics, pp. 55–70. Elsevier (2021). ISBN: 9780323854986. https://doi.org/10.1016/B978-0-323-85498-6.00006-X
Wisesa, I.W.W., Mahardika, G.: Fall detection algorithm based on accelerometer and gyroscope sensor data using Recurrent Neural Networks. IOP Conf. Ser. Earth Environ. Sci. 258(1), 012035 (2019). IOP Publishing
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Modak, R. et al. (2023). An Analysis of Current Advancements: Elderly Fall Detection Systems Using Machine Learning Techniques. In: Shaw, R.N., Paprzycki, M., Ghosh, A. (eds) Advanced Communication and Intelligent Systems. ICACIS 2023. Communications in Computer and Information Science, vol 1921. Springer, Cham. https://doi.org/10.1007/978-3-031-45124-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-031-45124-9_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-45123-2
Online ISBN: 978-3-031-45124-9
eBook Packages: Computer ScienceComputer Science (R0)