
Abstract
The intersection of robotics and architecture supports the search for new spatial, structural and construction models useful to support the innovation in conception and making of spaces towards a more sustainable production, and to refine the “Industry 4.0” paradigm from a humanistic perspective to meet the needs of the socio-ecological transition. One of the major emerging challenges of technological innovation, in fact, is to accelerate the realization of a high quality architecture that is responsive and sensitive toward the environmental and social context within which is designed and implemented. This requires a holistic and transdisciplinary approach during the whole process, from conception to construction. In this regard, the self-production in every-day architecture practice (starting from small scale projects) represents an important field for theoretical and empirical investigations that calls for a smarter use of traditional and non-traditional building materials, and innovative computational ways of dealing with craftsmanship for more sustainable manufacturing methods along the whole factory life-cycle, suggesting a greater insight into the humanistic basis of architecture. This chapter will frame the design-research in contemporary strategies and processes for architecture undertaken at ALO, architecture and design studio based in the south Sardinia (Italy), and will showcase some of the computational design and robotic fabrication research carried out within the daily practice.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- R&D and entrepreneurship
- Digital theory
- Design thinking and human–computer interaction
- Computational and parametric design
- Performance-based architecture and design
- Digital twin
United Nations’Sustainable Development Goals
- 9. Build resilient infrastructure, promote inclusive and sustainable industrialization and foster innovation
- 11. Make cities and human settlements inclusive, safe, resilient and sustainable
- 12. Ensure sustainable consumption and production patterns
1 Introduction
By reconnecting the design process to that of construction through a holistic and material driven approach, sustainability can emerge as a synthesis of different knowledge. Moreover, thanks to the contribution of a new computational thinking and processes to both moments, a more sustanible production can become actualised in a new tectonic and spatial conception of architecture that goes beyond utilitarian, decorative and mannerist paradigms and aims. The divergence from the conventional fragmented practice is becoming increasingly necessary.
However, recent developments show that this innovation tends to be relegated to elitist projects, landmarks, exotic canopies or sculptural pavilions [1]. The sustainable transfer of innovation in design and construction must aim at tailor-made strategies starting with small-scale interventions that, by sheer numbers, will have a greater impact on people's daily lives and the quality of urban development already from the micro-scale, while being oriented towards criteria of scalability and habitability.
At ALO we tackle this problem through a holistic applied research that focuses on investigating a novel conception and making of space by exploring innovative uses of traditional materials, like wood and concrete, and researching non-serial prefabrication as critical for a more sustainable production.
Our work is material-driven and supported by advanced computational design and fabrication strategies that help us to transfer into practice smart design criteria borrowed from nature.
To provide an overview of our design and fabrication research, the chapter is organized as follow: Sect. 1 introduces the research territory discussing then need for a humanistic approach to technology, some pivotal design criteria and key topics such as performative revamping, digital craft and the search for lightness.
The following sections present the structure of the ALO laboratories and provide a sample of three current holistic research strands unfolding through our practice: Innovate use of traditional materials (Sect. 2.1); Collaborative robotics for advanced building components (Sect. 2.2) and Computation in design and making for augmented human experience (Sect. 2.3). Finally, in conclusions, a trajectory for future developments will be introduced and a novel paradigm for collaborative robotics will be proposed.
1.1 The Humanistic Turn of Industry 4.0
By the middle of the first 20 years of the digital turn in architecture [2] the need for closer relationships among the processes of design and making, as well as computation and matter emerged. The exploration of novel possible futures was especially fed by theorists and scholars [3,4,5,6,7,8,9] who provided the ground for a novel culture in architecture more focused on the “how” rather than the “why”.
The renewed approach to architectural design, already passed through several, micro-phases, especially supported by the “democratization” of digital fabrication technologies, which starting from 2000s is bringing designers back in touch with the making. Fablabs [10], Arduino microcontroller or open source communities are only some of the expressions of a new culture bringing machines out from factories and closer to people. The concept of 3D printing, for example, is already mainstream. The vision for a procedural practice in architecture suggests the move from arbitrary top-down choices and empirically reconnects with matter through bottom-up strategies. Matter itself, and subsequently digital fabrication, started being regarded as active agents within the process of architecture itself, becoming generative, genetic and evolutionary.
To a part of the architectural domain already, design and making are conceived as a single non-linear data flow. This new paradigm is pushing architects and engineers to rethink their processes and strategies through computation. We are now bridging the gap that has emerged between the design and construction industries due to the mechanistic and fragmented view of complexity that has prevailed over the past two centuries.
Meanwhile, robotics landed inside architecture schools; and some research-oriented firms (among which ALO) are already prototyping their custom end-effectors to self-produce their own building components directly inside their proprietary laboratories, making research in matter and fabrication an actual instrument for design within their daily practice.
However, a technocratic race towards novelty seems also emerging driven by a fanatical attitude towards technology. Similarly this is also happening within the Industry 4.0 sphere. But technology per se doesn’t suffice to generate content and to impact everyday practice. We need a humanistic theoretical framework within which to understand why emerging technologies may be valuable for the next generation of architectures, and how to develop such a strong thinking to overcome even the possible unavailability or non-immediate accessibility of certain technologies, especially those for digital fabrication.
In “Mechanization takes command” Giedion provides a transversal analysis of the influence of the total phenomenon of mechanization correlating among several symptoms the “decaying sense of materials” not so much to mechanization but to “the manner in which mechanization was employed” [11].
Giedion work is still surprisingly relevant. In this regard, possibly one of the biggest weaknesses of the Industry 4.0 project lies in the way it has been proposed and received by industry, i.e. mainly from a technocratic point of view. In Italy, it often turned into a digital upgrade of obsolete machinery and procedures, as obtaining important tax incentives was not directly linked to the innovation of the products themselves. In 2021, up to 95%Footnote 1 of the cost of new machinery could be converted into a tax credit without, however, the benefit being tied, as a necessary condition, to the innovation of the products themselves. At the same time actions in favour of R&D towards design innovation offered tax credits up to only 10% of the investments.Footnote 2 The diversity of the two incentive policies somehow shows that, the main concern is to boost the market by stimulating the blind acquisition of new machines, of course connected to the Internet, equipped with monitoring sensors and able to share production data. Returning to Giedion, is there a sufficient interest in what is being done (or could be done) with these machines such as robots, especially in the architecture and construction sectors?
This open question highlight one of the major missed opportunity to trigger a tangible effort toward a new approach to industrial production in the pursuit of a sustainable industrialization through: (1) product differentiation, (2) a true collaborative and inclusive ecosystem among humans and machines, (3) the extension of product life through upgradability of components, (4) the overcoming of the constraints of mass production leading to overproduction, and (5) the pursuit of lightness [12]. We should indeed be especially concerned about reducing the weight of simple and complex products, as it is directly related to the amount of raw materials required for their production, transport, use and disposal or recycling.
As for architecture, perhaps the slowest sector to embrace technological innovation, the utilitarian I4.0 mindset may need a major revision if our goal is to become seriously environmentally responsible. Despite the ease of access to advanced fabrication techniques, more and more architectures are appearing that promise disruptive innovations but often turn out to be almost theatrical stage sets, illusory shining architectures heedless of the cost to keep them up.
For these reasons, both Industry 4.0 and computation in architecture shall aim to expand human capabilities by designing collaborative processes in which human and machine efforts are ideally deployed simultaneously (and not sequentially) to make innovative products and spaces that are consistent with the objectives listed above and that otherwise, without the intersection of the contributions of the two parties, could not be produced.
1.2 Tight-Fit and Performative Revamping
Invoking the concept of sustainability is already a cliché, a mandatory requirement, but in the end it is scarcely implemented in ordinary urban development. Deep down, nothing has changed in the way new residential buildings or shopping malls are designed and constructed. Sustainability has mostly turned into a list of qualities to be met and ingredients to be mixed, but at the scale of everyday life in general, interest in ordinary design and construction that does not disrupt established practices still seems to prevail. Just as sweeping the dust under the carpet is not a real solution, building greenish façades wrapping obsolete design concepts in the name of a certain biophilic luxury mood is also not a real answer.
The construction industry in large part, especially in small local communities, is not yet ready to dismiss older building systems, and this prevents the diffusion at daily practice of novel solutions for new buildings. For this reason, for a small research-oriented firm, bringing innovative concepts to the daily buildings practice can be still tricky. However, being equipped with a proprietary laboratory for the digital fabrication of complex building components offers great opportunities to explore an alternative path towards sustainability in architecture focusing on the advanced, high-quality revamping of existing, exhausted architectures.
In this context, small and old historical buildings, which often have complex and irregular spaces, are one of the most suggestive places to take an innovative approach in which technology becomes an instrument for finding new design opportunities that cannot be foreseen in advance, rather a tool for problem solving. In this sense, light-weight, tight-fit and performative interventions can be now carried out with a meticulous control of the liminal space between the old and the new.
Especially the search for light structural and construction models based on redundancy and differentiation becomes critical to preserve older buildings integrity and identity while exploring alternative models for a contemporary living through non-mimetic work.
Lightness, in a strict physical sense, is one of the greatest challenges for the contemporary culture that is widely educated to the idea that heavier is better while the lightest is ephemeral. Saving weight can have an exponential impact on the entire life cycle of a building, from its structural conception down to the furnishing and all the processes relating to its existence, including the industry that orbits around it.
Thomson discusses the concept of form in nature as the expression of the forces acting on a body [13]. Learning from nature, lightness is achieved by shape, by the differentiation of building components, by distributing forces across redundant adaptive systems made of small entities. In 1904 A.G.M. Michell presents a model for the minimization of material in frame-structures showing how their weight could be drastically reduced shifting from continuous elements to networks of multiple small building components [14]. His diagrams resemble the porous, organization pattern of the upper human femur bone tissue, which first exact mathematical analysis was originally published by John C. Kock [15]. In nature, lightness is a survival strategy indeed.
Next to these criteria of differentiation and distribution of forces, the integration of multiple functions into single building components, surpassing the segregation of functions into mono-purpose components, becomes as well critical towards the minimization of weight and matter consumption. Nature provides an infinite number of examples among which the eggshell, which performs as a protective envelope and a porous membrane that regulates the moisture level by allowing only water particles of a certain size to pass through, or sea sponges such as the Venus Basket sponge, whose structure allows the organism to resist the forces of sea currents but also to create low-speed interstitial micro-vortices that promote feeding and reproduction [16].
If we transfer the concepts of structural differentiation, lightness and polyfunctionality of building components to architecture, space becomes a differentiated body, whose components, from skin to furniture via structure, are no longer segregated to perform only single functions. Hereby, the figure of the architect, the engineer and the builder, as currently conceived, blur and embrace a new transdisciplinary approach, supported an active adoption of computational design and advanced manufacturing strategies. Hereby, the design process is no longer linear, but becomes performative as it produces knowledge by transgressing the boundaries of the disciplines through computation.
In this process, we need to be concerned about building a new responsible relationship with local artisans: it is necessary to breathe new life into a sector that suffers as much from the standardization and cost-cutting processes put in place by large retailers (offering increasingly low product quality well hidden behind more accurate finishes) as from the growing shortage of skilled labour. There is perhaps a need to refine the conception of digital craftsmanship, which has emerged over the past decade, recalibrating the concept not so much as an evolved expression of the individual, but as a collaborative virtuous process across disciplines.
1.3 Holistic Research-Driven Practice at ALO
ALO's roots back to 2005 and the firm was founded in 2012 in Cagliari, in the south of Sardinia (Italy). The context of a small island imposes many constraints that risk slowing down innovation processes. Architecture needs time to think and make mistakes, and making architecture the main activity of a small company could force one to accept too many compromises in order to survive. Moreover, in Italy, too many figures overlap and clash within a sector that is actually poorly regulated in terms of hierarchies and competences.
Despite our small company size, we push ourselves to be engaged in a significant production. We manage to keep architecture in a safe place; we feed the studio through complementary design-research and R&D services, and deeply dedicate ourselves to architecture only when there is the change to do something truly significant with open-minded clients.
Research has a pivotal role within our daily work. Every built, unbuilt or architectural competition project is taken as an opportunity to push further our agenda.
In order to make actual our thoughts through everyday studio life, we are developing an in-house laboratory for digital fabrication, and we are already able to strategically combine several techniques from laser cutting, to 3d printing and robotic processing within our projects. Exploring a strategic combination of different digital technologies and defining an ethical and meaningful role for robots in architecture is indeed one of the biggest questions we are addressing.
In this search, the idea that digital fabrication has become a broader transversal concept. It is a holistic synthesis of thought, design and realisation; a transformative entity that triggers new possible futures and fosters our agenda.
The hybrid studio setup, blurring from studio to advanced industry grade workshop, supports a cost-effective research towards the cross-pollination of architecture, engineering and a performative manipulation of traditional materials.
At ALO we took such a challenge, and we work to merge advanced design and fabrication protocols with traditional craftsmanship so that all parties within the process contribute to the achievement of unique final result that are an expression of the intersection of the best of their abilities.
Having embarked on a path of constant innovation and research has helped us to trigger a virtuous activity of high-quality sartorial and performative architectures.
1.4 The Project of Villa Vi. A Study Case on the Innovate Use of Traditional Materials
Villa Vi is a villa located on the coast of Golfo Degli Angeli in Quartu Sant’Elena (Cagliari). It was built in the’60 s and the aim was to transform the building into an experiential, fine guest house. Villa Vi project embodies some of our thoughts about the intersection of contemporary living and hospitality with matter, digital fabrication and the aim of providing an immersive architectural experience for guests. For this purpose, architecture and matter have a pivotal role; the search for innovative applications of traditional materials like wood and concrete was central (Fig. 1a, b).

a, b View of Villa Vi's main garden and building. A computational environmental analysis informed the differential organization of the landscape so to provide a beneficial microclimate for outdoor living during the hot summer season
The entire work was triggered by the original traits of the existing structure of the villa featuring uncommon triangular arches surrounding two porches on the main facades. Their polygonal topology became the generative seed for the entire design which aim was to blur the boundaries between exterior and interior spaces across scales. Beside the full renovation of the façades, interiors spaces and exteriors, including the design of the performative landscape surrounding the villa, we designed and robotically fabricated a collection of bespoke wooden, faceted furniture, POLYHEDR.a, the new concrete main entrance portal POLYHEDR.a/r and several parts and jigs to facilitate an high-precision and fast construction (Fig. 2).

Digital wood: the architectural furniture is made of self-supporting sub-modules. All facets are designed through a computational procedure that generates all geometrical features necessary for the six-axis circular-saw robotic-cut carried out directly at ALO laboratory
1.4.1 Innovation of Traditional Materials Through Computation in Design and Making
POLIHEDR.a are irregular polyhedral pieces of furniture that, by shape, integrate several functional accessories typical of a guest room. A desk, a bookcase, and the luggage rack find their place in a compact but articulated hybrid wall system that wraps around a stand-alone shower space. These are the main elements organizing the layout of Villa Vi guest rooms. From the very beginning, the pieces were intended for self-production. Therefore, we developed a sophisticated parametric system that served both to digitally adapt the topology of the layout of each guest room to the different dimensions of the floor surface and to achieve state-of-the-art finishing qualities as a unique expression of the synthesis of design and fabrication.
From the very beginning, we decided to use birch plywood as building material. This material is characterized by exceptional structural performance and CNC machinability. This was important to achieve well-refined, self-supporting structures even while using panels of reduced thickness. However, processing birch plywood requires special attention. This is because, for example, the colour one perceives can change from honey to chocolate depending on his/her point of observation. In this regard, our goal was to achieve a final monolithic appearance, with continuous grain flowing in one sole direction as well as a homogeneous colour between the faces while moving around the piece.
From this initial brief, we decided to start the design-research looking at the “Quartabuono” joint to assembly all faces without showing the thickness of the panels. This type of joint is used in carpentry to join wooden elements that must form a right angle with the section of the material not visible to give continuity to the grain.
However, when it comes to irregular polyhedral, both concave and convex, with thick faces and more than three faces converging to one vertex, exactly the collision of the thicknesses of the facets at the vertexes would require an empirical trial and error assembly procedure making impossible a precise fabrication of the parts by traditional means. Therefore, due to the complexity of the parts and over all assembly, the design-research aimed to develop e fully digital design and fabrication protocol to avoid any kind of manual intervention and achieve a high quality finishing.
Given the amount of aspects to intersect as a whole, the project required clearly a computational design approach (Fig. 3). A first software module allows to work on a simplified parametric figure, a “skin without thickness”, in order to facilitate the adaptation of each piece to rooms size while minimizing calculation time and the real time verification of the compliance with all manufacturing constraints, among which, for example, the minimum acceptable values for the angles between adjacent faces (set to 20°). Then, once the morphology is set up, a second module independently processes the digital twin by transforming all simple faces into 3D panels with a given thickness, calculating the bisector of the shared faces and eliminating excess material in the joints, the number and position of connecting dowels, part numbering, and all the data needed to drive the six-axis circular saw cutting and multi-tool robotic manufacturing as a whole. The entire system is parametric, so changes can still be applied and reflected in new digital manufacturing layouts.

The diagram illustrates the phases of recursive computation for the generation of the executive 3D digital twin of the guestrooms’ totems
POLYHEDR.a parametrics delivers further sophisticated design features. It recognizes the spatial orientation of each face of the polyhedral figure with respect to a given observation vector and then, getting ready for their digital fabrication, it unfolds all parts flat on a plane and carry out the nesting negotiating among (1) the initial reference vector for grain, (2) the direction of the grain of the raw board to be machined (3) the minimization of residual waste material. As a result, once facets are assembled back in real world, the grain wraps the figure as a continuous flow, enhancing the global monolithic appearance of the furniture still reducing the amount of raw matter necessary for the construction (Fig. 4).

Detail of the grain flowing along the body of the furniture along one consistent direction
In addition to this, in order to facilitate the assembly, every part is numbered according to a specific protocol that provides for each face (1) a unique tag identifying the part itself, and for every edge, (2) the tag of the adjacent part. Artisans taking care of the assembly could then assembly all parts just following the tagging system and a few 3D representations of the final piece.
Starting from this research we derived the POLYHEDR.a/r formwork system to robotically fabricate the scaffoldings system for the production of the concrete structural components of the entrance (Fig. 5).

Digital Concrete: a view of the FRC portal
This reverse version of the parametric system, as the name suggests, builds the thickness of the scaffolding and all production drive data calculating the thickness of the material outside the initial 3D reference geometry of the part.
In addition, POLYHEDR.a/r parametrically generates all components of the inner steel reinforcements as well.
1.5 The RCC Project. A Study Case on Collaborative Robotics for Advanced Building Components
The concept of collaborative robotics is spreading across industrial production; however, it is largely presented from a reductive perspective of problem-solving.
Differently, human–robot collaboration should go beyond the idea of simply replacing human labour in repetitive or heavy tasks in order to become instrumental to deep product innovation.
To tackle such utilitarian approach, in 2018 ALO initiated the research project originally named “Robotic Collaborative Construction” (RCC) focusing on designing products and processes where humans would work in unison with machines summing both best skills to achieve complex productions not otherwise possible.
Our agenda is to effectively transfer the research on robotic fabrication in architecture into daily architecture practice, with a focus on the scalability of the results to small-scale projects with limited budgets too. For this purpose, RCC addresses a further architectural elaboration of some of the criteria enunciated by Pearce (1980) and, specifically, that of “Minimum Inventory/Maximum Diversity” [17] from a holistic and computational perspective to the advantage of a greater flexibility with respect to the possible architectural conception and making of space.
In this sense, RCC explores the idea of a non-standardised digital prefabrication that is efficient in terms of cost, processing energy consumption and the architectural quality of the results in terms of their completeness, structural integrity and refinement.
Imagining such a scenario, perhaps starting from the architectural domain, we could enunciate a new model of industry, the “Industry X”, where “X” is not a letter but a symbol representing the symbiotic interaction between man and robot.
1.5.1 RCC Hardware and Software Design-Research
The project stems from the idea of combining to our advantage, on the one hand, the capability of robots as spatial positioners for building components and, on the other hand, the ability of a skilled worker, such as a welder, to complete complex assembly operations that need human awareness ore solve unexpected faults in real time in a viable manner.
For this purpose we designed a double-curved membrane consisting of steel rings to by assemble without the use of any kind of scaffolding or jigs. The rings had to be welded in place by an operator while the robot was employed to recursively load and position each component, piece by piece, directly according to a dynamically linked 3D parametric model (Fig. 6). Some might argue that welding could also be automated. But in the event that an artificial-intelligence robotic system could be adapted for this application to handle unforeseen complexities in real time by autonomously adjusting processing paths, what would be the cost of such a total automation development in terms of research, necessary infrastructure, and long-term flexibility? Would such total automation be a reasonable option to make the process sustainable even for a small firm or for application to small-scale projects? Even with an access to infinite resources, we believe these questions should be given more consideration.

Details of the 3D double-curved membrane parametrically generated as to preserve the tangency between building components and manufacturing tolerances
For this reason, the RCC project departs from some of the totalitarian and technocratic positions that are emerging in the field that seem to increasingly distance research from viability in everyday practice in the name of novelty itself. On the contrary, RCC aims to enhance the skill, versatility and intuition of human operators towards greater architectural quality, flexibility and agility in a lean digital production.
The overall objective of the basic research was to develop a set of proprietary hardware and software tools to prove the concept, evaluate potential issues to be addressed and possible future research directions and application in daily practice.
On the hardware side, we designed and 3D printed a custom self-centring gripper (Fig. 7) to perform parametrically controlled pick-and-place-and-weld operations driving the robot directly from the design interface of the digital-twin.
The gripper is electrically isolated to allow welding operations while the robot still holds the part in place. In common practice, the part to be welded is fixed on an external positioner (1 or 2 axis) while the robot performs the welding; we inverted the roles, living the welding to a skilled worker and using the freedom of six-axis positioning to facilitate complex assemblies (Fig. 7). Moreover, the gripper has a certain level of autonomous intelligence. Through embedded sensors, it can detect when the part has been picked and then control the force applied to hold it firmly without overloading motors. It has also an embedded LED lighting system to communicate its state with the operator. All building parts and mechanisms have been designed to be 3d in-house printed in the perspective of a sustainable research economy and further developments.
On the software side, we have expanded the control and simulation capabilities of existing methods based on the Kuka PRC plug-in [18], the parametric programming environment for robots that since 2016 has made robot programming easily accessible to designers. We developed a series of customized codes to facilitate simulation control, to trigger specific actions along the process based on factors of time, distance and Boolean operations. We also developed a system to check the state of the end-effector and provide feedback consents during the process. The control engineering of the gripper was realized in-house too connecting the parametric digital-twin to our kuka robot via Arduino micro controller to carry out online simulations and off-line programming too.
Finally, we developed a general parametric digital environment that accurately simulates complex end-effector actions to be verified for both safety and assembly accuracy purposes. In the perspective of future architectural applications, the system has proved suggestive for hypothesizing complex assemblies (even of non-standardized building components) to more accurately fit complex design contexts with clean prefabricated solutions, potentially useful in the case of an intervention in a historic building.
The research work was supported by the “Microincentivi per l'Innovazione” grant program awarded to ALO by Sardegna Ricerche (2019) (Fig. 7).

Digital assembly of the self-centering gripper (left). In-house 3d printed functional end-effector (top-right). Testing the collaborative construction protocol (bottom-right) with the robot positioning building components and the welder fixing parts in place

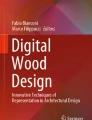
The figure shows the APTICA interfaces with the 3D miniature of the artwork. The dark top surfaces are the touch feelers, sensing surfaces that enable the multimedia contents navigation
1.6 The APTICA Project. A Study Case of Computation in Design and Making for Augmented Human Experience
The need for accessibility of spaces and culture is finally spreading; architecture has first and foremost a responsibility towards people who, for whatever reason, have a disability. The accessibility of museums is one of the critical issues with respect to which this renewed attention is beginning to be prolific and translates into an innovation of methods and processes to facilitate the enjoyment of museum content. In this context, starting from the small scale of museum devices and installations, new digital fabrication technologies and advanced multimedia strategies are gaining ground in the research and development of new methods to engage visitors in inclusive, immersive and rewarding experiences.
Our research work on this subject started in 2019, thanks to the collaboration with CRS4 (Sardinia's Centre for Research, Development and Advanced Studies) that commissioned ALO to design and prototype a functional device for the multimedia and tactile exploration of pictorial works. Our work stemmed from the initial studies developed by researchers at CRS4 on the transformation of pictorial works into scaled 3D representations, equipped with sensors to enable the multimedia content. From here, we developed a new complete and functional interface named APTICA.
Beyond the utilitarian aspects, which were particularly relevant to this project, the brief immediately showed the possibility of opening a new chapter within philosophical, historical and semiological discussions about the frame, an object that has so far assumed the status of a theoretical object as observed by Pinotti [19].
The frame, which appeared in a context that intended art as a reality detached from the one we live in, was a boundary between the representation and real space. Its purpose was intended to intensify the perception of the depth of the field or to project the movement outwards.
The historical evolution of its role went through various phases until its denial. However, the whole debate starts from the assumption of a visual fruition of the artworks; therefore for people with severe visual impairment, the frame in its traditional conception loses its value. This consideration raised a new question: Can we reformulate the role of the frame and envision a new type that encourages alternative cognitive processes and facilitates the tactile exploration of pictorial artworks? Indeed, the challenge of this project was to move from the concept of the frame as a boundary for the eye to that of an intensifier of the senses.
1.6.1 Accessibility by Design
A complex tactile experience requires training and preparation. A strategy is needed to see objects with the hand, and from the perspective of a designer there are specific criteria that must observed in order to achieve effective results [20]. APTICA is ultimately designed to prepare the hands for the tactile experience.
The device is a table-top physical object with part of its body that seems floating over the supporting surface with the aim of isolating it from the surrounding world and stimulating the perception of a suspended object on which to focus one's senses.
The first part that user comes into contact with is the perimeter of the frame: a fragmented body made up of a sequence of blades, all different and oriented like rays towards the centre of the subject. The fragmentation aims to provide an initial intense tactile transition from the surrounding solid objects to the sensorial space.
Then the hands encounter a second element, the skin: a smooth surface surrounding the tactile subject at its centre. The skin is a neutral transition zone to reset the touch. The concave shape of the skin then guides the hands towards its deepest part suggesting a tactile immersion in the sensory space of the 3D tactile miniature. To achieve a smooth and robust surface, the skin is made of glass fibre moulded on a mould made by robotic milling.
Finally, at the centre of the membrane is a platform to accommodate the interchangeable tactile cards that are automatically recognised by the system to enable the respective audio and video descriptions. The tactile surfaces on the top layer of the 3D miniatures feature a sophisticated design that takes advantage of a computational design strategy to fill the area with a single line pattern necessary to build conductive tracks with a minimum amount of electrical connections.
1.6.2 The Computational Design of Single Line Touch Feelers
The subjects of the paintings are simplified and transformed into small-scale three-dimensional figures, each with a different height according to the different degrees of depth in the artwork. The upper part of each figure has been developed as a tactile surface, the touch feeler, which perceives visitor's touch and allows multimedia content stored on the integrated PC to be activated.
Next to Aptica body, the development of the touch feelers was the second major research topic we carried out. We were asked, for technical and usability reasons, to design a new sensor working based on two electrical connections (positive and ground) that would work without bracelets or additional connections. Accordingly, the work focused on finding a computational strategy to generate the conductive traces while minimizing the number of electrical connections and ensuring in-house feasibility of the prototypes.
Various geometrical approaches were explored (Fig. 9), however, in the case of non-compact figures, many failed to produce a single curve occupation. But this was very important to avoid overly complex wiring and an excessive number of electrical connections. Moreover a non-directional pattern would have been beneficial to avoid confusing the tactile perception of the figures. Hence, we searched for a computational strategy to generate an occupation pattern consisting of a single curve capable of filling any kind geometric figure, compact or non-compact.
Various geometrical approaches were explored (Fig. 9), however, in the case of non-compact figures, many failed to produce a single curve occupation. However, this was very important to avoid overly complex wiring and an excessive number of electrical connections. Moreover a non-directional pattern would have been beneficial to avoid confusing the tactile perception of the figures.

The diagrams illustrate the different geometrical and computational approaches tested in order to find a single line filling procedure adaptable to both compact and non compact figures
Finally, hooking back to the studies of D. Hilbert or W.Sierpinski [21] on space-filling curves such as those, we developed a computational protocol that, starting from a given boundary condition (the edge of the figure) and a set of genotypic parameters and constraints, modulates and folds back the edge on itself up to fully occupy the figure with a single complex curve. The single curve folds on itself according to a set of guide parameters that define: (1) the distance of the folds from the boundary of the figure, (2) the distance between the end and start point, (3) the minimum interstitial space between folds, (4) the minimum radius of curvature of the folds. The complex figure generated becomes then a geometrical skeleton for the construction of the conductive traces of the Touch-Feeler (Fig. 10).

Detail of the conductive graphite pattern of the touch feelers prototype
Through this procedure, which combines physical-computing methodologies and parametric-associative design strategies, we obtained a generative system that occupies the space of the figure with a single continuous trace, while still matching production and functional constraints. The graphite based touch feelers were then prototyped in our laboratory by fine-tuning a reliable fabrication protocol combining painting, cutting and laser engraving as to achieve repeatable and precise results.
For this project, various digital fabrication techniques were strategically combined to address both the performative needs and budget economy; from this intersection, we could successfully develop a new type of interface that, by its shape and materiality, offers new opportunities to answer the demand for the accessibility of pictorial artwork. A new design iteration has been already undertaken for the development of a still more stable and durable version of the touch feelers. Nevertheless, APTICA is an expression of a novel design culture where computation, matter and fabrication actively combine to make avant-garde innovation possible inside small scale design studios too.
2 Conclusions
The chapter outlined some of the criteria supporting ALO's design research in the field of contemporary strategies and processes for architecture. The projects sampled are the expression, at different scales, of an effort made in the course of everyday practice towards the formulation and acceptance of new concepts of space, structure and furniture, as well as of making strategies and human experience.
In this framework, digital fabrication and robotics become instrumental towards a novel material culture focusing on the achievement of a performative materiality. The search for new spatial repertoires and construction models according to the criteria illustrated aims to reduce the consumption of resources through a novel logic of differentiation and polyfunctionality. The concept of architectural composition is surpassed by the concept of formation; the design process is no longer linear and becomes performative as well; non-standardized prefabrication provides novel opportunities for a more responsible and higher quality production even for everyday small projects; matter and fabrication themselves become active agents within the conception and making of space and designs for human experience.
To date, dealing with small-scale interventions has certainly facilitated the implementation of some of the key aspects of our research. As also noted by Colarevich [22], certainly the scale factor is significant, especially since the behaviour of materials changes precisely in relation to the size of the parts. But we are aware that the performance of a material is as much an expression of its intrinsic capacity as of its form. We therefore believe that, although the shift to larger scale in general cannot be straightforward, the construction criteria highlighted and derived from a holistic and biomimetic approach to architecture pave the way for a new generation of smart and intrinsically more sustainable and smart architecture. Certainly, the smartness we pursue goes far beyond the widespread idea of smartness, which often focuses on the mere integration of digital technologies that can make architectures almost alive, capable of informing us about their state of operation and their relationship to their surroundings.
Rather, as a primary and unavoidable condition, smartness should be a matter of the materiality itself of architecture, both spatial and constructive. We should look for a type of intelligence which could provide the ability to passively contribute to the microclimatic well-being as much as to the programmatic and energy needs of both the occupants and the surrounding environment. The new architectures will possibly be interactive constituents of an augmented urban and territorial ecosystem.
2.1 Toward the Industry “X”
Like many other digital technologies that were initially confined to factories, robotics is undergoing a phase of democratisation. However, while the potential of robotic applications in production and human life is increasingly arousing enthusiasm, a sense of scepticism is also emerging because these technologies are often seen as a substitute for human labour. While it is true that machines are often used only to maximize production to meet the needs of mass production at the expense of certain labours, the digitization of production, if aimed at mass customization, can foster the specialization of existing figures and the emergence of new figures and markets. In fact, this is already happening.
In this context, we have the opportunity to embark on a virtuous path in which robotics is not a mere substitute for humans, but an instrument to enhance their skills and capabilities. By overcoming mistrust through a humanistic education in technology and developing critical thinking regarding certain fetishist approaches, we could develop a true deontology to elaborate strategies that privilege human–machine interaction and lead to collaborative productions that would not be possible without such interaction. Industry X, would be a new model of production based on a symbiotic and ethical interaction between man and robot; the X would just represent such a powerful convergence.
References
Saiu, V.: The Three Pitfalls of Sustainable City: A Conceptual Framework for Evaluating the Theory-Practice Gap. Sustainability 9, 2311 (2017). https://doi.org/10.3390/su9122311,lastaccessed15/12/2022
Carpo, M.: The Digital Turn in Architecture 1992 - 2012. Wiley (2013)
Alexander, C.: A Pattern Language: Towns, Buildings. Oxford University Press, Construction (1977)
Cache, B.: Earth Moves: The Furnishing of Territories. MIT Press, Cambridge, MA, USA (1995)
Landa, MD.: A Thousand Years of Nonlinear History. Princeton University Press (2021)
Deleuze, G., Guattari, F., Massumi, B.: A thousand plateaus: capitalism and schizophrenia. Minnesota Press, Minneapolis (1987)
Leach, N.: Rethinking Architecture: A Reader in Cultural Theory. Psychology Press (1997).
Saggio, A. The IT Revolution in Architecture. Thoughts on a Paradigm Shift. Lulu.com (2008)
Weinstock M (2004) Morphogenesis and the Mathematics of Emergence. Archit Des 10–17
Gershenfeld, N.A.: Fab : the coming revolution on your desktop–from personal computers to personal fabrication. Basic Books, New York (2005)
Giedion, S.: Mechanization Takes Command: A Contribution to Anonymous History, Illustrated Univ Of Minnesota Press, Minneapolis (2014)
Beukers, A., Hinte, E.: Lightness: The Inevitable Renaissance of Minimum Energy Structures. 010 Publishers (2005)
Thompson, D.W.: On Growth and Form. Cambridge University Press, Cambridge (1992)
Michell, A.G.M.: LVIII. The limits of economy of material in frame-structures. Lond Edinb Dublin Philos Mag J Sci 8, 589–597 (1904). https://doi.org/10.1080/14786440409463229,lastaccessed15/12/2022
Koch, J.C.: The laws of bone architecture. Am J Anat 21, 177–298 (1917). https://doi.org/10.1002/aja.1000210202,lastaccessed15/12/2022
Falcucci, G., Amati, G., Fanelli, P., Krastev, V.K., Polverino, G., Porfiri, M., Succi, S.: Extreme flow simulations reveal skeletal adaptations of deep-sea sponges. Nature 595, 537–541 (2021). https://doi.org/10.1038/s41586-021-03658-1,lastaccessed15/12/2022
Pearce, P.: Structure in Nature is a Strategy for Design. MIT Press (1980)
Stumm, S., Braumann, J., Brell-Cokcan, S.: Human-Machine Interaction for Intuitive Programming of Assembly Tasks in Construction. Procedia CIRP 44, 269–274 (2016). https://doi.org/10.1016/j.procir.2016.02.108,lastaccessed15/12/2022
Ferrari, D., Pinotti, A.: La cornice: storie, teorie, testi. Johan & Levi, Monza (2018)
Levi, F., Rolli, R.: Disegnare per le mani. Manuale di disegno in rilievo. Silvio Zamorani Editore, Torino (1994)
Sagan, H.: Space-Filling Curves. Springer-Verlag, New York (1994)
Kolarevic, B.: Actualising (Overlooked) Material Capacities. Archit. Des. 85, 128–133 (2015). https://doi.org/10.1002/ad.1965,lastaccessed15/12/2022
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Verde, M. (2024). The Humanistic Basis of Digital Self-productions in Every-Day Architecture Practice. In: Barberio, M., Colella, M., Figliola, A., Battisti, A. (eds) Architecture and Design for Industry 4.0. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-36922-3_35
Download citation
DOI: https://doi.org/10.1007/978-3-031-36922-3_35
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-36921-6
Online ISBN: 978-3-031-36922-3
eBook Packages: EngineeringEngineering (R0)