
Abstract
This paper aims to present the ongoing research effort on hybrid-propulsion unmanned aerial vehicles (UAVs) carried out at the University of Victoria Centre for Aerospace Research (UVIC-CFAR). The study involves the development and updating of an optimization framework capable of evaluating vertical takeoff and landing (VTOL) and conventional takeoff and landing (CTOL) unmanned aerial vehicle (UAV) hybrid propulsion performances, with a recent focus on more unconventional configurations mounting fuel cells onboard. A preliminary sizing and mass analysis for the hybrid propulsion system of a UAV with VTOL capabilities was accomplished. A similar analysis was also performed for a CTOL configuration powered by hybrid fuel cell schemes. Finally, a hybrid test bench used to validate the models and test the components is presented. The paper concludes with the general statement that for small UAVs, a hybrid power plant can lead to improvements in endurance, fuel consumption, and efficiency along the mission.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
2.1 Introduction
In recent years, the development of UAVs combined with Hybrid-Electric Propulsion Systems (HEPS) has emerged as a promising area of research for greening aviation. The use of HEPS is particularly relevant to VTOL aircraft with distributed propulsion, leading to a variety of operating modes, more versatility and redundancy.
Together with the well-known series and parallel HEPS, which are classically composed of conventional engines, electric motors and batteries, novel intriguing opportunities towards a completely electric-powered aircraft can come from the usage of fuel cells. The high specific energy of hydrogen makes it an attractive option for long-range more-electric aircraft, as proven by the several UAVs and manned aircraft flown purely under fuel cell power (Baroutaji et al. 2019).
The modelling of HEPS for UAV has proven to be a helpful tool for studying powertrain performance (Xie et al. 2021). In the past years, many researchers tried to build tools capable of simulating multiple aircraft architectures and propulsion systems along different mission profiles to size and optimize new or existing configurations, with a special focus on the extra degrees of freedom coming from HEPS concepts. In the wake of that, a simulation platform capable of evaluating aircraft performance independently from the propulsion system was created by Matlock et al. (2018) in the MathWorks MATLAB environment. Recently new features and models have been implemented. The main novelty of the tool is the capability to simulate, besides the classic takeoff, cruise, and landing segments for fixed-wing (FW) aircraft, also mission phases typical of VTOL architectures, performing hover and transition segments. These configurations are usually characterized by distributed propulsion systems and thus the framework has been extended from the single propeller concept to allow the control and simulation of more power outputs and their respective powertrains at the same time. Finally, the model for the internal combustion engine has been updated to ease its scalability and a mathematical model of the fuel cell has been created.
2.2 Methodology
The design framework aims to evaluate the performance of hybrid electric propulsion systems with application to UAVs. It allows to run comparison analysis against conventional electric and gasoline propulsion systems sharing a common mission profile, as well as to optimize an existing system by sweeping mission parameters, internal components and testing different control logics that, especially for small hybrid UAVs implementing this new combined type of propulsion, are strongly linked to the overall efficiency of the power-train and must be incorporated in the optimization study to achieve the best working synergy between the components. In fact, the strength of the tool lies in its modularity, since each component is modelled separately and single parts can easily be exchanged to meet the top-level requirements in the most effective way.
The framework is based on an iterative backward-looking system architecture. The aircraft aerodynamic model parameters are defined and allow to determine the thrust required at the propellers and then, according to the propulsion type selected, the single models are activated to match the requirements, giving as output the component status in terms of throttle, power and consumption for that time step. Each powertrain component is modelled with numerical and surrogate modelling techniques, therefore, the models can be simply adapted and updated to quickly evaluate the performance of different propulsion systems, independently from the aircraft dynamics. The accuracy of these models has been increased based on experimental data recorded during test bench demonstrations and flight test campaigns.
The battery modelling is based on the Simulink model developed by MathWorks for the charging and discharging characteristics of Li-Po batteries (Tremblay and Dessaint 2009). The model allows to select the size of the battery in terms of number of cells, operating voltage and capacity. As common practice, the brushless and brushed DC motors are modelled with a simple equivalent circuit, as explained by Lundström et al. (2010). Blade element and momentum theory combined with propeller databases have been used to predict lift, drag and the propeller coefficients, which are then used to compute thrust, torque and power at the shaft (MacNeill and Verstraete 2017). The internal combustion modelling is based on both manufacture and experimental engine maps. Engine maps including fuel consumption, power output, RPM and torque were collected for a range of two-stroke combustion engines. This database was used as reference for the Willans line formulation (Rizzoni et al. 1999), which has been recently applied also in the aviation field to build elastic scaling of the models, allowing the selection of the optimal component by sweeping the engine displacement and piston stroke.
The mathematical model for Proton-Exchange Membrane Fuel Cells (PEMFC) receives the aircraft power request, its initial temperature, the type of cooling performed, the pressures of the fuel and the oxidizer streams. Moreover, the fuel cell configuration is defined by its five most relevant parameters such as the number of stacks, the number of cells in each stack, the stack weight, volume, and heat capacity. Temperature-invariant parameters responsible for reaction kinetics, as well as structural limitations such as fuel utilization rate, are considered constant. Fuel is assumed to be hydrogen and oxidizer is assumed to be ambient air. Other components, such as clutch, Electronic Speed Controller (ESC), and generator for the case of the hybrid configurations have been modelled with efficiency coefficients taken from the literature or manufacture data.
2.2.1 Test Bench Setup
To validate the theoretical models and scaling efforts, an experimental test bench has been created. This test bench allows for component and system level characterization of several different hybrid architectures. With its modular design, new components of various sizes or fuel sources can easily be implemented to evaluate performance as illustrated in Fig. 2.1. Current efforts towards the conversion to a series configuration and the integration of a BZ-130 fuel cell in the test bench, as shown in Fig. 2.2 are ongoing.

Parallel hybrid-electric test bench

BZ-130 fuel cell stand
2.3 Simulation Results
The proposed investigation aims to evaluate and compare the performance of a series and parallel HEPS designed for a VTOL UAV configuration (Fig. 2.3) and other two fuel cell/battery and fuel cell/gasoline hybrid schemes developed for a conventional FW UAV, shown in Fig. 2.5, against conventional battery-electric and gasoline aircraft systems.
2.3.1 Thrust-Vectoring Configuration
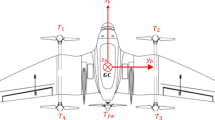
The Eusphyra model is a VTOL tilt-rotor canard-wing architecture designed to perform Magnetic Anomaly Detection (MAD) along the Canadian coast (Fig. 2.3). The tilting rear rotor mechanism was selected to reduce the power installed on board, to optimize the usage of the components and thus reduce the overall weight. The main driving parameter is the maximum takeoff mass (MTOM) set to 25 kg, due to current Canadian legislation on non-recreational UAV system operations. A baseline mission was built according to defined requirements, including a vertical takeoff, forward transition, dash until the area of interest, cruise over that region, dash back, transition and landing.

Eusphyra VTOL CAD model
The endurance analysis (Fig. 2.4) shows the intersection point at which one configuration becomes more desirable compared to another. The electric configuration results infeasible after only 30 min of cruise time, since the mass of the battery linearly reaches values that are not acceptable for the defined MTOM. The parallel and series have roughly the same dry mass, due to the balance between extra components and connections complexity, while the gasoline is slightly lighter. However, since the ICE has been selected for maximum power request for the VTOL segment, it is oversized for cruise and thus far away from its optimal operating point (OOP). This leads to higher fuel consumption, causing a rapid increase of the overall weight and making it an unsuitable solution for a longer cruise phase. On the other hand, the hybrid configurations lead to savings in terms of fuel burnt due to the downsizing of the engine and the possibility to operate it in its OOP for cruise, and hence, they become a more and more advantageous solution with time.

Propulsion mass sweep for VTOL
2.3.2 Conventional Configuration
The hybridization process for the QT-1 FW model has previously been studied by Matlock (2016), but without considering the implementation of fuel cell technologies on board (Fig. 2.5).

QT-1 FW CAD model
The new design includes a fuel cell/battery hybrid architecture, which uses a fuel cell electrically coupled with a battery in parallel to drive an electric motor for propulsion, and a fuel cell/gasoline hybrid architecture, which mechanically couples an electric motor powered by a fuel cell to an internal combustion engine. For the fuel cell/gasoline hybrid, the internal combustion engine is the main power source and therefore hydrocarbon fuel is prioritized; instead, the other fuel cell/battery aircraft prioritizes hydrogen over the batteries. A generic mission designed to maximize the UAV’s loiter time was used to compare the propulsion systems.
The propulsion systems were evaluated in a takeoff mass (TOM) range of 25–33 kg (Fig. 2.6). The fuel cell/gasoline hybrid concept can be seen to suffer from the structural weight added by the fuel cell; configurations with TOM below 27 kg were impossible to implement within the propulsion system constraints. However, fuel cell and gasoline-powered aircraft were noted to be evenly matched throughout the explored range, with gasoline aircraft having higher endurance below TOM of approximately 30 kg, and fuel cell-powered aircraft having higher endurance above this weight.

Takeoff mass sweep for fixed-wing aircraft
2.4 Concluding Remarks
Two architectures were hybridized, a VTOL and a FW configurations. For the first case, it was shown that significant savings of energy and cost are achievable for both series and parallel. In fact, especially for aircraft that require high excess power for short periods, like during the vertical takeoff, HEPS are a viable solution. Generally, the parallel configuration is preferred to the series due to its higher efficiency and lower weight thanks to the absence of the generator. However, in this case, considerations regarding the complexity, efficiency, weight of the tilting mechanism, ease of control, and rapid-response during vertical operations led to the architecture in series to be chosen for the propulsive system, since it is simpler and is easier to implement in small aircraft even at a cost of a slightly higher mass. In fact, for distributed propulsion configurations, this initial downside can be compensated by integration and aerodynamic benefits. For the second case, it was shown that for higher MTOM, the fuel cell technology is a solid possibility that warrants further research to reduce or completely eliminate the dependence on fossil fuels and thus reach a greener aviation.
UVIC CFAR has long term plans to continue to research and develop HEP technologies for use in a variety of UAV applications. Future studies must aim to optimize the configurations by developing more information on modelling and increasing the confidence in the design by testing them, and finally to assess the risks and benefits coming from the integration of these systems on board.
References
A. Baroutaji, T. Wilberforce, M. Ramadan, A.G. Olabi, Comprehensive investigation on hydrogen and fuel cell technology in the aviation and aerospace sectors. Renew. Sust. Energ. Rev. 106(February), 31–40 (2019). https://doi.org/10.1016/j.rser.2019.02.022
D. Lundström, K. Amadori, P. Krus. Validation of models for small scale electric propulsion systems. 48th AIAA aerospace sciences meeting including the new horizons forum and aerospace exposition, 1–18 January (2010). https://doi.org/10.2514/6.2010-483
R. MacNeill, D. Verstraete, Blade element momentum theory extended to model low Reynolds number propeller performance. Aeronaut. J. 121(1240), 835–857 (2017). https://doi.org/10.1017/aer.2017.32
J. Matlock. Evaluation of hybrid-electric propulsion systems for unmanned aerial vehicles. Master’s thesis, University of Victoria (2016)
J. Matlock, P. Sharikov, S. Warwick, J. Richards, A. Suleman. Evaluation of energy efficient propulsion technologies for unmanned aerial vehicles. May (2018). https://doi.org/10.25071/10315/35397
G. Rizzoni, L. Guzzella, B.M. Baumann, Unified modeling of hybrid electric vehicle drivetrains. IEEE/ASME Trans. Mechatron. 4(3), 246–257 (1999). https://doi.org/10.1109/3516.789683
O. Tremblay, L. A. Dessaint. Experimental validation of a battery dynamic model for EV applications. 24th international battery, hybrid and fuel cell electric vehicle symposium and exhibition 2009, EVS 24, 2, 930–939 (2009). https://doi.org/10.3390/wevj3020289
Y. Xie, A. Savvarisal, A. Tsourdos, D. Zhang, J. Gu, Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 34(4), 432–450 (2021). https://doi.org/10.1016/j.cja.2020.07.017
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Obertino, D., Sharikov, P., Matlock, J., Suleman, A. (2023). Design Considerations for Hybrid-Electric Propulsion Systems for FW-VTOL Aircraft. In: Karakoc, T.H., Usanmaz, Ö., Rajamani, R., Oktal, H., Dalkiran, A., Ercan, A.H. (eds) Advances in Electric Aviation. ISEAS 2021. Sustainable Aviation. Springer, Cham. https://doi.org/10.1007/978-3-031-32639-4_2
Download citation
DOI: https://doi.org/10.1007/978-3-031-32639-4_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-32638-7
Online ISBN: 978-3-031-32639-4
eBook Packages: EnergyEnergy (R0)