
Abstract
In this study, braking torque characteristics of a disc-shaped Magnetorheological brake (MRB) structure are determined on the test platform. The primary purpose of this study is to determine the relationship between the generated braking torque depending on the current supplied to the coil on the MRB device. The process of determining the brake torque characteristics on the test platform consists of three steps. In the first step, the study deals with the magnetorheological fluid (MRF) characteristics and the MRB structure. In the second step, a brake test platform is built to measure the torque generated on the MRB. In the third step, the measurement procedure on the platform is introduced, and experiment results are analyzed. These results show that the relationship between the generated braking torque depends on the input amperage. The study’s results confirm the effectiveness of magnetorheological fluid in highly appropriate scientific and technical fields.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In scientific research, the research on the test platform is one of the commonly used methods. The results of the measurements on the test platform can be used as input parameters for simulation problems or to evaluate the model’s reliability or the system’s efficiency and performance. Also, for these purposes, in the world, there have been many experimental studies on the MR brake system in order to determine the braking torque characteristics when changing the current, speed, or changing brake system structure.
Research by Mousavi et al. [1] with a new configuration of the MR hybrid brake consisting of a T-shaped drum with an arc surface. The author has experimentally determined the braking torque when changing the amperage, through which the maximum braking torque is 38.5 Nm when the maximum current in each coil is 1.2 A. Another study by Sukhwani and Hirani [2] determined the torque characteristics of the MRB when changing the current from 0 to 1.2 A and the number of revolutions of the motor from 200 to 1200 rpm. Another synthetic study was carried out with the analysis on the test bench of the moments generated with different structures of MR brakes such as drum, multilayer magnetic, and disc type [3] and showed some Braking torque characteristics with current and structure. Research by Dr. Ngoc Nguyen Anh [4] has proposed a new type of MR brake with the features of modeling, structure optimization, testing, and prototype analysis. The main contribution of this work is the optimal design of the new configuration of the MR brake to improve the braking torque. However, for magnetic brakes, to evaluate the application effectiveness for specific objects, the output braking torque characteristics need to consider the structure’s mass and volume. Therefore, with the specific MRB structure chosen by the authors, the goal is to use the experimental method on the brake test platform with high stability and accuracy to determine the characteristics of the braking torque generated on the MRB when changing the input current value is necessary.
The structure of the paper is that after the overview, the second part introduces the basic operating principle of the brake using MR fluid. The third part presents the structure and operating principle of the brake test platform, including the method, equipment, and measurement parameters. The final part presents the results and comments.
2 Theory
2.1 Magneto-Rheological Fluid
Magnetorheological Fluid is an oil containing ferromagnetic particles. It is an innovative material that can quickly change phase state (liquid-semi-solid) and whose reversible properties are controlled by an applied electric current. When applying a current to the coil, a magnetic field will appear, and that magnetic field directly affects the properties of the oil. Usually, soft ferromagnetic or paramagnetic particles (0.03–10 µm) are dispersed in the oil layer. Without a magnetic field, ferromagnetic particles are distributed mainly in the liquid. However, under the action of the applied magnetic field, the ferromagnetic particles acquire a dipole moment by the external magnetic field and form chains. In addition, the yield stress of the magnetic oil can be adjusted continuously and rapidly as it responds to the applied magnetic field strength [5]. The properties of MR fluids used in brake equipment are often expressed as Bingham models with varying yield strength (τy), depending on the magnetic field (H), [4, 6].
2.2 Working Principle of MR Brake
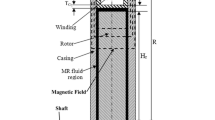
To apply MRF technology to the automotive auxiliary brake system, the structure of the MRB consists of a fixed part and a rotating part (Fig. 1). The fixing includes the mounting parts on the brake support, including details such as the outer stop plate, the outer stop plate, the outer stop disc, and the bolts, nuts, and screws on the fixing assembly. On the fixed assembly, two conductive coils are placed between the inner stop and the outer stop, each winding 1000 turns, with a wire diameter of 0.5 mm. Fixing elements are bolted together by standard bolts. The rotating cluster has the main detail as the rotating disc. In addition, to ensure smooth movement between the rotating part and the fixed part, in the design, there are two more assemblies of ball bearings and an oil seal. Outside there is a stop disc to prevent the oil seal from slipping out of the installation position. The space between the rotating disc and the two inner plates is filled with magnetic oil.

MRB construction. 1—Bolt; 2—Outer stopper cover; 3—Coil; 4—Inner stopper; 5—Rotary disc; 6—Magneto-Rheological Fluid; 7—Bearing assembly and oil seal
With the above structure, the torque transmitted from the active part (the motor through the gearbox) will make the passive part (the rotating disc) rotate at a certain speed. In the state where no current is supplied to the coil arranged in the cavity of the MRB, there exists a resistance between the MRF layer itself and the rotating disc part. When applying current to the coil, the magnetic field generated by the coil will act on the oil areas in different positions on the brake disc, changing the shear stress of the oil. Doing so will change the state of the MRF and create some of the MR oil’s frictional resistance when the oil layer’s structure hardens. From there, generate the motor’s shaft braking torque. An engine cover is arranged to hang on the pedestal through the bracket. The braking torque will act, tending to rotate the motor’s housing. Therefore, to determine this torque, a lever is arranged with one end attached to the motor housing, the other end resting on the spring of the rheostat torque sensor.
3 Determination of MR Brake Characteristics on the Test Platform
The MR brake test stand should meet the following objectives and requirements:
-
Determination of brake torque-current characteristics; Braking torque -revolution speed in different modes.
-
Ensure that there is no strong vibration or fluctuation during the measurement, affecting the measurement results;
-
Compact manufacturing, easy to transport and install;
When applying current, the shear stress of the changing magnetic oil will create resistance to the rotor shaft of the electric motor, creating a torque that tends to rotate the motor housing, through the lever mechanism will exert a force on the electric motor. A brake force sensor will convert to a voltage signal, send this signal to the processor, and display the measured brake torque value on the screen.
3.1 Structure of Brake Test Rig
The test pedestal consists of 40 × 40 shaped aluminum frame bars supporting the entire load and 20 × 20 aluminum frames as the outer cover. We divide the test platform into two main parts:
-
The lower part of the test platform is located in the control system: control circuit, transformer, driver, and laptop, and the circuit are separated from the inverter by POM plastic.
-
The upper part of the test platform includes mechanical mechanisms: hybrid servo motor, gearbox, coupling, magnetic brake, and accompanying mounting plates (Fig. 2).
Fig. 2 
Model of MR brake test rig. 1—Mechanical part; 2—Front door; 3—Control Circuit location; 4—Transformer location; 5—Laptop location; 6—Test rig frame part

The 110J12190EC-1000 stepper motor provides a maximum torque of 20 Nm at 1000 rpm. Included with the 110J12190EC-1000 stepper motor is a 3HSS2208H driver. The 3HSS2208H stepper servo drive system integrates perfect motor control and is suitable for three-phase stepper motors. Compared with traditional stepper drive, this hybrid servo motor driver can avoid the problem of the stepper motor losing a step and effectively limit the motor’s temperature rise, reducing the motor’s vibration and greatly enhancing the performance of high-speed motors. A lever is captured from the engine. It will cause a load on the sensor when the MRB is engaged. In addition, bearings and couplings are used in the mechanical system to provide a smooth movement from the engine to the MRB.
3.2 Measurement Process
The investigation of the braking torque characteristics of the MRB on the pedestal is carried out in two modes:
-
Mode 1: Investigate the relationship between braking torque and amperage (brake). In this study, fixed motor speed investigated the change of MRB brake torque generated when changing current.
-
Mode 2: Investigate the relationship between braking torque and engine speed. In this mode, fix the current value, and investigate the change of MRB brake torque generated when changing motor speed (Table 1).
Table 1 Two test modes on the test rig
4 Results and Comments
Figure 3 shows the result of amperage-dependent braking torque in three measurements when keeping the engine speed at 1000 rpm. The amperage varies from 0 to 900 mA, 100 mA steps. The results show that the braking torque increases with increasing current, and the braking torque characteristic is almost linear. When the current increases from 0 A to 900 mA, the measured braking torque value on the platform increases from 0 to the maximum value of 29.42 Nm respectively.

Braking torques are measured when changing the current in 100 mA increments
Figure 4 shows the braking torque in three measurements depending on engine speed. In this study, the current was kept constant at 500 mA, and variable motor speed from 0 to 2000 rpm, step 250 rpm. The results show that when fixing the supply current to the MRB brake device and changing the number of engine revolutions, the value of the braking torque produced is almost unchanged. Reach a steady value of about 18 Nm at 250 rpm. The results confirm that the braking torque of the MRB is mainly influenced by the value of the amperage supplied to the coil.

Braking torques are measured when changing the motor speed
5 Conclusion
The research results of this paper are the basis for intensive application studies on brake systems using magnetic oil technology in the field of science and technology in general, as well as the automobile industry in particular. Braking torque characteristics can be used as input for the research and development of automobile brake assist systems. In addition, the research results can also be used as a basis for the problems of optimizing the MRB structure to increase the braking torque or determine the safe working area of the MRB.
References
Mousavi SH, Sayyaadi H (2018) Optimization and testing of a new prototype hybrid MR brake with arc form surface as a prosthetic knee. IEEE, pp 1204–1214
Sukhwani VK, Hirani H (2007) Design, development, and performance evaluation of high-speed magnetorheological brakes. https://doi.org/10.1243/14644207JMDA120
Avraam T (2009) MR-fluid brake design and its application to a portable muscular rehabilitation device. Active Structures Laboratory Department of Mechanical Engineering and Robotics
Ngoc NA (2016) Development and analysis of new multipole magnetorheological brake. College of Mechanical and Electrical Engineering, College of Mechanical and Electrical Engineering
Kciuk M, Turczyn R (2006) Properties and application of magnetorheological fluids, vol 18, issue 1–2, September–October 2006
Edminister A (1993) Schaum’s outline of theory and problems of electromagnetics, 2nd ed. McGraw-Hill
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Quang, TH., Minh, HT., Anh, NN., Thanh, TT. (2023). Determination of Magnetorheological Brake Characteristics by Experiment on the Test Rig. In: Long, B.T., et al. Proceedings of the 3rd Annual International Conference on Material, Machines and Methods for Sustainable Development (MMMS2022). MMMS 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-31824-5_47
Download citation
DOI: https://doi.org/10.1007/978-3-031-31824-5_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-31823-8
Online ISBN: 978-3-031-31824-5
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)