
Abstract
Vehicle vibration is a problem that is currently in need of research attention to improve the quality of automobile exploitation. The suspension system directly affects vibration as well as safety and performance. It helps control and suppresses the vibration of the road acting on the chassis, helping the vehicle to move stably and the passengers on the vehicle to feel smooth. The design to optimize the suspension, more specifically the damping is being interested in and developed, one of the ideas is to add shock absorbers using magnetorheological fluid, which can change the viscosity by electricity. This study will simulate the traditional suspension system and the suspension system with the addition of using magnetorheological fluid dampers (MR dampers) when the vehicle moves into different profiles on the road. MR dampers are activated and supplement the damping force for a certain period to quickly reduce the amplitude of the vibration, test with different values of the force from the MR damper to evaluate and select the most reasonable value. The results show that the body vibration amplitude is improved, the ability to suppress vibration increases, the shake angle of the vehicle body decrease, respond the smoothness, and increase the convenience of the car.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In the process of economic development and serving social life, the demand for transportation of passengers and goods is increasing daily. With its advantages, car transportation is better than other means of transport. Many modern cars were born to meet the needs and purposes of human use. Research aimed at improving the quality of automobiles is needed. Research on oscillation and its effect on transport service quality, durability of automobile parts and structures is increasingly interesting.
When a car moves on the road and encounters bumps on the road, the car will experience a loss of smoothness. This force tends to cause the coordinates of the center of gravity of the suspended mass to change, causing the vehicle to become unstable, causing discomfort to people in the vehicle. Therefore, limiting this phenomenon in the vehicle is necessary. The solution is to increase the value of the damping force, one of the methods of adding a damping element [1].
The problem of longitudinal instability of the vehicle has been studied by domestic and foreign scientists as well as many solutions, one of the solutions given is the use of additional dampers [2]. However, previous studies have often focused on passive damping. To increase the value of resistance against the force from the road surface feedback to the vehicle, it is necessary to increase the stiffness of the suspension. Today, vehicles are often equipped with dampers to minimize the reaction from the road surface to the vehicle. The stiffness and size of the shock absorbers are proportional to the mass of the vehicle, larger vehicles require larger diameter and stiffer shock absorbers. Therefore, it will greatly affect the smoothness of the car when moving on the road.
Given the above problems, instead of using conventional mechanical dampers, some midsize and high-end vehicles have been equipped with electrically or hydraulically controlled dampers. Active damping has the advantage of reducing body movement when entering bumpy areas, thereby increasing the smoothness of the vehicle when in motion.
This paper focuses on simulating the working efficiency of dampers to propose a design option for active dampers equipped with MRF to provide additional force value against pavement reaction when entering uneven roads.
2 Building a Simulation Model of the Suspension System with MR Damper
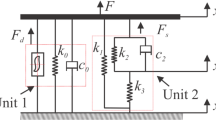
Research, orientation to build diagrams studied in the document [3, 4]. From the literature [5], 1/2 and 1/4 suspension models are built, we have constructed and formulated a mathematical differential equation for the whole vehicle vibration. For example, we have a left-front suspension diagram (Fig. 1).

Overall spatial model to survey the vibrations of passenger cars
The damping force of the left wheel:
The elastic force of the left wheel:
Call Z1T the point on the left of the front axle connected to the body through the left front suspension.
The damping force of the left front suspension:
The elastic force of left front suspension:
From this we can get the equilibrium equations.
The force balance equation of the vehicle body in the Z direction:
The equation of moment balance in the X direction:
The Y-direction moment balance equation:
3 Vehicle Vibration Simulation
Based on the differential equations describing the vibration of the whole vehicle to simulate the vibration of the full body vehicle. Then proceed to solve the vibration equation.
Vehicle parameters
The parameters are referenced from the passenger car line with the following specific parameters:
-
Load of the whole vehicle at no load: M = 4000 (kg)
-
Moment of inertia along X axis: Jx = 10,000 (kg m2)
-
Moment of inertia along Y axis: Jy = 5760 (kg m2)
-
Tire hardness: KL1 = 200,000 (N/m); KL2 = 240,000 (N/m)
-
Tire damping coefficient: CL = 2000 (Ns/m)
-
Front damping drag coefficient: Ct = 10,000 (Ns/m)
-
Rear damping drag coefficient: Cs = 10,000 (Ns/m)
-
Front suspension stiffness: Kt = 100,000 (N/m)
-
Rear suspension stiffness: Ks = 120,000 (N/m)
-
Distance from center of gravity to front axle: a = 2.1 (m)
-
Distance from center of gravity to rear axle: b = 1.9 (m)
-
Vehicle speed: v = 60 km/h.
Road surface agitation function
4 Simulation Results
The simulation is performed with a suspended mass of 4000 kg when moving on an amplitude of the road of 5 cm and 10 cm.
-
(a)
Simulation and comparison of the results of the center of gravity amplitude of the vehicle with and without the use of MR dampers.
Survey with h = 5 cm and h = 10 cm (Fig. 2).

The graph of the maximum value of the body vehicle vibration amplitude with MR damper force
-
For h = 5 cm with the value F MR = 7000 N, the maximum amplitude of fluctuation reaches the minimum value of 1.142 × 10–2 (m).
-
For h = 10 cm with the value of F MR = 14,000 N, the maximum amplitude of fluctuation reaches the minimum value of 2.011 × 10–2 (m) (Fig. 3).
Fig. 3 
Graph comparing the vehicle’s center of gravity with F MR = 7000 N, h = 5 cm (left) and h = 10 cm (right)

The vibration of the vehicle’s center of gravity has been reduced:
-
72.5% from 4.449 × 10−2 to 1.224 × 10–2 m for pavement amplitude h = 5 cm
-
41.166% from 8.728 × 10−2 to 5.135 × 10–2 m with pavement amplitude h = 10 cm.
With the addition of an MR damper, the body vehicle displacement is less, which proves that there is an optimum in terms of comfort when adding an MR damper.
-
(b)
Simulation comparison of acceleration results between vehicles with and without magnetic damper MR (Fig. 4).
Fig. 4 
Vehicle acceleration graph with pavement amplitudes 5 cm and 10 cm

The vibration acceleration has decreased:
-
18.71% from 4.013 m/s2 to 3.262 m/s2 for pavement amplitude h = 5 cm
-
21.94% from 8.001 m/s2 to 6.245 m/s2 with pavement amplitude h = 10 cm.
Due to the change in body vehicle vibration amplitude, the acceleration also changes, this change is appropriate when adding an MR damper. Although there has been a change in amplitude, there is not much change in vibration quenching time, This is a limitation as well as can become the next research direction to be able to further optimize the results.
5 Conclusion
With simulation results, it has been shown that the damper using magnetorheological fluid (MR damper) affects the displacement of the body’s center of gravity. When an additional force of 7000 N is applied, the MR damper works more effectively reduced by 41.166% compared to when no MR force is added. Theoretically, the more force applied to the damper, the lower the body displacement decreases, which makes the vehicle move more smoothly, but in practice, the design of the MR damper must ensure the main geometric dimensions of the components. Details in the suspension such as volumetric length and width, orifice diameters, as well as the thicknesses of the main components, so that the production of larger force values is possible but in practice is affected by the size, so in this research, the survey team with MR force is 7000 N. With the obtained simulation results, it can be seen that after adding the MR damper with force F = 7000 N, the vehicle has moved more smoothly when the vibration amplitude is reduced in both cases of the test road, despite the time vibration quenching time does not change much, this may be the next research direction to improve the efficiency of the design.
References
Jang J, Dong M (2018) Research on vibration of automobile suspension design
Oh J-S, Choi S-B (2019) Suspension system featuring magnetorheological dampers with multiple orifice holes
[Online]. Available: http://www.timtailieu.vn/tai-lieu/luan-van-tot-nghiep-tim-hieu-simulink-trong-matlab-2812/
Mohammadzadeh A, Haidar S (2006) Analysis and design of vehicle suspension system using MATLAB and Simulink. Grand Valley State University, p 11.213.1
Trai NK, Hoan NT, Huong PH, Chuong NV (2010) Automobile structure
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Ngoc, N.A., Quan, L.H., Quan, V.H., Tien, N.M., Anh, N.N. (2023). Research on the Vibration of Passenger Car Using Magnetorheological Fluid Damper. In: Long, B.T., et al. Proceedings of the 3rd Annual International Conference on Material, Machines and Methods for Sustainable Development (MMMS2022). MMMS 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-31824-5_45
Download citation
DOI: https://doi.org/10.1007/978-3-031-31824-5_45
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-31823-8
Online ISBN: 978-3-031-31824-5
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)