
Abstract
In this article, we study the non-linear partial differential equation given by \(u_t+Pu^k u_x+Qu_{xxx}+Su=f(t)\), where P, Q, S denote non-linear coefficient, dispersion coefficient, and damping coefficient, respectively; f(t) denotes external hyperbolic forcing term, \(f_0 cosh(\omega t)\). The parameter ‘k’ denotes the non-linear exponent. For \(k= n\), where \(n \in N\), the equation represents the Generalized Damped Forced KdV (GDFKdV) equation, and for \(k= n/2\), it can be referred to as the Generalized Modified Damped Forced KdV (GMDFKdV) equation. Initially, analytical solution of the Generalized KdV (GKdV) equation and the Generalized modified KdV (GMKdV) equation are derived employing sine-cosine method. Further, we obtain the solitary wave analytical solutions to the GDFKdV and GMDFKdV equations by using the direct assumption technique. We construct the generalized forms of the solutions, which involve two new parameters, ‘a’ and ‘b’. In the first instance, the solutions to GDFKdV, and GMDFKdV may look very similar. However, in this article, it has been shown that the nature of solitons and their topological structures emerging from these two equations are very different. Using the method of dynamical systems, we analyse the bifurcation and nature of the solutions. Finally, the pseudo-spectral method, which we employed to approximate the solutions, is proven to be ineffective concerning time and the increasing value of exponent power n. Our theoretical results are supported by our numerical experiments.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nonlinear evolution equations (NLEEs) can be used to represent a wide range of complicated physical processes and have applications in many areas of research, including physics, chemistry, biology, astronomy, and others [1, 3, 8, 10, 15, 20]. Several researchers have suggested different approaches to find its analytical solutions, e.g., the Hirota bilinear method [22], the generalized exponential rational function technique [6], the local fractional natural homotopy analysis method [4], the semi analytical method [19], the simple equation method [9], the Exp (–\(\phi (\xi )\)) expansion method [11, 12], the sine-cosine method [21] to name a few. Finding approximate analytical solutions to NLEEs may present some difficulties if a highly nonlinear term appears in these equations. For example, the scenario may become more complicated if damping or forcing terms are present [13, 17].
Recently, enormous interest began to investigate the NLEEs under a localized disturbance in the dynamic system [14, 16]. Actually, some excellent observations in the astronomical space plasma environment motivated the researchers for examining the NLEES under the influence of external forces [2, 18]. Again, damping is a common phenomenon that exists in all real physical systems. Thus, the non-autonomous system containing damping and forcing terms is much more realistic than its autonomous counterpart.
In this paper, we take into account a highly nonlinear evolution equation and use the direct assumption method to generate approximate analytical solutions that contain both damping and forcing terms, and we study the bifurcation analysis while considering the forcing and the damping terms equal to zero. For this generalized setting, it exhibits different-different topological structures for a range of values of the parameters which are supported by the numerical technique, the Pseudo-spectral method [5]. The spectral approach can be used to approximately correlate the numerical results to the analytical results. Accuracy is provided using spectral approaches with an exponential convergence rate. With this approach, the partial differential equation can be represented as a linear combination of basis functions, with the coefficient chosen so that the resulting linear combination closely approximates the solution. This approach has a number of constraints, including boundary conditions. To support our theoretical findings in this study, we are using the fundamental Pseudo-spectral approach.
We consider the non-linear evolution equation
where f(t) stands for the external hyperbolic forcing term and P, Q, and S stand for the non-linear coefficients, dispersion coefficient, and damping coefficient, respectively. The non-linear exponent is denoted by the parameter k, for which if \(k = n\), it represents the GDFKdV equation and if \(k = n/2\), it is the GMDFKdV equation, where \(n \in N\). equal to zero.
In this paper, Sect. 2 represents the analytical solutions for \(k = n\), and \(k = n/2\) which are obtained by the sine-cosine method for the simplified case i.e. \(u_t+Pu^k u_x+Qu_{xxx}= 0\). It appears that there is no significant difference in the solution profile except for varied values of P. However, when this equation is transformed into a dynamical system, it becomes clear that the solutions of GKdV and GMKdV behave very differently near their equilibrium points for the same value of the parameters, which is investigated by the standard tools of the bifurcation analysis in Sect. 3. By using the direct assumption technique, an approximative analytical solution for a generalized situation Eq. (1.1) is obtained. It can be seen that the parameters have a dramatically different effect on the solutions of GDFKdV and GMDFKdV, which are displayed using contour plots and three-dimensional surface graphs. This is the subject matter of Sect. 4. In Sect. 5, we extend the study by introducing two new parameters, a and b in the solution of Eq. (1.1), which is referred to as the generalized solution of the GDFKdV and the GMDFKdV here. It is observed that for the different values of these parameters, one can obtain multiple types of solitons which may depict Gaussian-type pulses, multiple humps, and twisted curved sheet-like topological structures. These results are supported by the Pseudo-spectral method, described in Sect. 6. The conclusion of this study is summarized in Sect. 7.
2 Approximate Analytical Solutions of GKdV and GMKdV Equations
Consider the case of a general non-linear partial differential equation with an unknown \(u=u(x,t)\) as,
Now introducing a new stretching variable \(\zeta \) by combining the real variables x and t such that,
Eq. (2.1) is converted into an ordinary differential equation (ODE) with the help of the above transformation,
where \((')\) signifies a derivative with respect to \(\zeta \) and \(\mathcal {M}\) is a polynomial in terms of V and its derivatives.
The sine-cosine approach suggests that the solutions could take the following form of
or in the form
where \(\lambda _0\), \(\gamma \) and \(\zeta \) are included parameters to be determined. Substituting Eq.(2.4) or Eq.(2.5) into Eq.(2.3), and solving the system of equations to obtain all possible values of the parameters \(\lambda _0\), \(\gamma \), and \(\zeta \). Put the values into Eq.(2.4) or Eq.(2.5), will present a new solutions of Eq.(2.3).
We employ sine-cosine method to find the analytical solutions of GKdV and GMKdV equation. Here, a suitable transform is chosen to reduced the partial differential equation into an ordinary differential equation (ODE). We consider a generalized form of KdV equation given by
Using the wave transformation \(u(x,t)=V(\zeta ),\,\zeta =w_{0}(x-ct)\), and taking integration, we find
According to the sine-cosine method the solutions of Eq. (2.7) can be expressed in the form
By substituting Eq.(2.8) into Eq.(2.7) gives the system of algebraic equations
Solving this system, we have
From Eq. (2.10),the analytical solution of Eq.(2.6) is obtained and given by
Now, we have two cases: for (a) \(k=n\), and \(k=n/2\); they correspond to GKdV and GMKdV equations, respectively. Their solutions are as follows
-
Case 1 \(k=n\) (GKdV equation), the solution is
$$\begin{aligned} u(x,t)=\left[ \frac{c(n+1)(n+2)}{2P} sech^{2}\left( \frac{n}{2} \sqrt{ \frac{c}{Q}}(x-ct)\right) \right] ^{\frac{1}{n}}. \end{aligned}$$(2.12) -
Case 2 \(k=n/2\) (mGKdV equation), the solution is
$$\begin{aligned} u(x,t)=\left[ c\frac{(n+2)(n+4)}{8P}sech^{2}\left( \frac{n}{4}\sqrt{\frac{c}{Q}}(x-ct) \right) \right] ^{\frac{2}{n}}. \end{aligned}$$(2.13)
These solutions are plotted in Fig. 1 for the parameters \(P = 0.5, Q = 2.5, t = 0.5, c = 0.5\). For Fig. 1 (a), (e), n is varied and rest of the figures \(n=3\) is kept fixed and P, and Q are varied. From the comparison of these figures, it seems there is no significant difference in the analytical behaviour of the solitons obtained for both GKdV and GMKdV except for the parameter P. In the next section, we employ certain tools such as eigenvalues and phase portraits from bifurcation analysis to investigate the impact of the parameters on the solution profiles.

The solutions of GKdV and Modified KdV are compared. The parameters used are: \(P = 0.5, Q = 2.5, t = 0.5, c = 0.5\), and \(n=3\) is fixed except for the figure where n is varied.
3 Bifurcation Analysis of GKdV Equation and GMKdV Equation
By following the [7], the dynamical system corresponding to Eq.(2.7) is as follows
The determinant of Jacobian matrix is \( |J| = -\frac{1}{Qw_{0}^2} \left( c - P u^k \right) \), we have two equilibrium points for this system: (0, 0) and \(\left( \left( \frac{\left( k+1\right) c}{P}\right) ^{1/k}, 0 \right) \), \(n \in N\). The corresponding eigenvalues are
In the dynamical system given by Eq. (3.1), we have a exponent k, different values of \(k = n~\text {or}~ n/2\) will produce different sets of equilibrium points. In this study, we are considering \(n =[1, 3, 5]\).

Behaviour of Dynamical system (3.1) for GKdV and GMKdV equation. For odd values of \(n =[1,3,5]\) and other parameter are \(c=1\); \(P = 0.4\); \( Q=0.35\); \(w_0=1\).
Let us consider two cases:
-
For \(k =n\), the dynamical system corresponds to GKdV equation. The phase portraits corresponding to \(n = [1,3,5]\) are shown in Fig. 2 a, b, c for fixed value of the parameters \(P =0.4\), \(Q= 0.35\), \(c_0=1\), and \(w_0 =1\). For \(n=1\), the system will have two equilibrium points (0, 0) and \(\left( \frac{2c}{P}, 0 \right) \). There is a center in the vicinity of point \(\left( \frac{2c}{P}, 0 \right) \), and trajectories show periodic behaviour around this center. These trajectories move away from each other when they move further towards (0, 0) which implies that the system becomes unstable in the neighborhood of (0, 0) and enters into unbounded open orbits. For fixed values of the parameters, the system will always remain unstable in this orbit. Similar conclusions can be drawn for \(n =3, 5\).
-
For \(k = \frac{n}{2}\), the dynamical system will correspond to the GMKdV equation. For \(n = [1, 3, 5] \), we will have a fractional exponent. The phase portraits are shown in Fig. 2 d, e, f corresponding to these values of n, considering the same values of the parameters used to plot phase portraits Fig. 2 a, b, c. This system will have one saddle point at (0, 0) and one centre point at \(\left( \left( \frac{(\frac{n}{2}+1)c}{P} \right) ^{2/n}, 0 \right) \). In the neighborhood of the center point, these trajectories show periodic behaviour. Proceeding further, the system becomes unstable near the saddle point, and trajectories stop moving forward at this unstable point. For the higher value of n i.e., \(n = [3, 5]\), these trajectories are showing compressive behaviour and moving towards an unstable point.
For GKdV and GMKdV, the equilibrium point, corresponding eigenvalues, and expected topological properties are summarized in Table 1 and Table 2. Complex equilibrium points are omitted here as they may not be very useful for practical purposes.
4 Approximate Analytical Solutions of GDFKDV and GMDFKDV Equations
In this section, we shall derive approximate analytical solutions of GDFKDV and GMDFKDV equations by using direct assumption technique. Recall, a generalized form of equation as
where S is damping coefficient, and f(t) denotes the forcing term. We take the solution for the above equation as
We know that \(I= \int ^{\infty }_{-\infty }u^2 dx\) is conserved. Thus, we have
Differentiating the Eq. (4.3) with respect to t and taking Eq. (4.1) and Eq. (4.3) together with differential value as,
(Since \(\int _{-\infty }^{\infty }u^{k}uu_{x}dx=0\) and \(\int _{-\infty }^{\infty }uu_{xxx}dx=0 \) both holds true.)
By simplifying the Eq. (4.4), we obtain following differential equation for c(t) as
For the forcing term \(f(t) = f_{0}\cosh (\omega t)\), the solution is
where
and the constant
-
Case1. \(k = n\), Solitary Wave Solution of GDFKDV For the forcing term \(f(t) = f_{0}\cosh (\omega t)\), the solution is
$$\begin{aligned} u=\left[ \frac{c(t)(n+1)(n+2)}{2P}sech^{2}\left( \frac{n}{2}\sqrt{\frac{c(t)}{Q}} (x-c(t)t)\right) \right] ^{\frac{1}{n}}, \end{aligned}$$(4.7)where
$$\begin{aligned} c(t)^{\frac{1}{n}}= \frac{2\beta \left( \frac{1}{n},\frac{1}{n}\right) f_0}{2^{\frac{2}{n}}\beta \left( \frac{2}{n},\frac{2}{n}\right) \root n \of {\frac{(n+1)(n+2)}{2P}}} \left[ \frac{8Scosh(\omega t)-2\omega (4-n)sinh(\omega t)}{16S^2-\omega ^2 (4-n)^2}\right] +c_{1}e^{-\frac{4S}{(4-n)}t}, \end{aligned}$$and the constant
$$\begin{aligned} c_{1}= c^{1/n}_{0}-\frac{2\beta \left( \frac{1}{n},\frac{1}{n}\right) f_0}{2^{\frac{2}{n}}\beta \left( \frac{2}{n},\frac{2}{n}\right) \root n \of {\frac{(n+1)(n+2)}{2P}}} \frac{8S}{16S^2-\omega ^{2}(4-n)^2}. \end{aligned}$$ -
Case2. \(k = n/2\), Solitary Wave Solution of GMDFKDV For the forcing term \(f(t) = f_{0}\cosh (\omega t)\), the solution is
$$\begin{aligned} u=\left[ \frac{c(t)(n+2)(n+4)}{8P}sech^{2}\left( \frac{n}{4}\sqrt{\frac{c(t)}{Q}}(x-c(t)t) \right) \right] ^{\frac{2}{n}}, \end{aligned}$$(4.8)where
$$\begin{aligned} c(t)^{\frac{2}{n}}\,{=}\, \frac{4f\beta \left( \frac{2}{n},\frac{2}{n}\right) }{2^{\frac{4}{n}}\beta \left( \frac{4}{n},\frac{4}{n}\right) \left( \root n \of {\frac{(n+2)(n+4)}{8P}}\right) ^2} \left[ \frac{16Scosh(\omega t)-2\omega (8-n)sinh(\omega t)}{64S^2-\omega ^2 (8-n)^2}\right] +c_{1}e^{-\frac{8S}{(8-n)}t}, \end{aligned}$$and the constant
$$\begin{aligned} c_{1}=c^{2/n}_{0}-\frac{4f \beta \left( \frac{2}{n},\frac{2}{n}\right) }{2^{\frac{4}{n}}\beta \left( \frac{4}{n},\frac{4}{n}\right) \left( \root n \of {\frac{(n+2)(n+4)}{8P}}\right) ^2 } \frac{16S}{64S^2-\omega ^{2}(8-n)^2}. \end{aligned}$$

The solutions of GDFKdV and GMDFKdV are compared for different values of damping parameter \(S = [0.1,0.2,0.5,0.8]\). Other parameters used are: \(c_0 = 0.5, P = 0.5, Q = 2.5, \omega = 0.5, n = 3, f = 0.01\).
The impact of the damping coefficient on the solutions of GDFKdV and GMDFKdV is shown in Fig. 3. The damping coefficient is considered for these discrete values \(S = [0.1,0.2,0.5,0.8]\), and the rest of the parameters are kept fixed as \(c_0 = 0.5, P = 0.5, Q = 2.5, \omega = 0.5, n = 3, f = 0.01\). It is very clear from the plots that the profiles corresponding to GDFKdV and GMDFKdV are very different. For GDFKdV, with an increase in damping coefficient, the soliton, which has a Gaussian-pulse type structure, tends to flatten down from the backside. The impact is clearly visible in the contour plots also. A similar impact can also be observed for GMDFKdV. The impact of frequency coefficient \(\omega \) on the solution profiles of GDFKdV and GMDFKdV is shown in Fig. 4. The values of \(\omega \) are \(\omega = [0.05, 2.0, 2.5, 3.0]\), and rest of the parameters are \(c_0 = 0.5, P = 0.5, Q = 2.5, f = 0.02, n = 3, S = 0.01\). For both GDFKdV and GMDFKdV, it can be seen that with an increase in frequency coefficient, the soliton acquires curvature, which is visible in surface plots and corresponding contour plots.

The solutions of the GDFKdV and GMDFKdV are compared for different values of frequency coefficient \(\omega = [0.05, 2.0, 2.5, 3.0]\). Other parameters used are: \(c_0 = 0.5, P = 0.5, Q = 2.5, f = 0.02, n = 3, S = 0.01\).
5 Generalized Solutions of GDFKDV and GMDFKDV Equations
For our generalized problem
we consider the solution in more generalized form given as follows
For the hyperbolic forcing term of the form, \(f(t)= f \cosh (\omega t)\), the generalized solution is as follows:
-
Case1. \(k = n\), Solitary Wave Solution of GDFKDV
$$\begin{aligned} u=c^a(t)\left[ \frac{(n+1)(n+2)}{2P}sech^{2}\left( \left( \frac{n}{2}\sqrt{\frac{1}{Q}} (x-c(t)t)\right) c^b(t)\right) \right] ^{\frac{1}{n}}. \end{aligned}$$(5.3a)where
$$\begin{aligned} c^a(t)= \frac{a\beta \left( \frac{1}{n},\frac{1}{n}\right) f}{2^{\frac{2}{n}}\beta \left( \frac{2}{n},\frac{2}{n}\right) \root n \of {\frac{(n+1)(n+2)}{2P}}}\left[ \frac{4aS cosh(\omega t)-2\omega (2a-b)sinh(\omega t)}{4a^2S^2-\omega ^{2}(2a-b)^2}\right] +c_{1}e^{-\frac{2aS}{(2a-b)}t}, \end{aligned}$$(5.3b)and the constant
$$\begin{aligned} c_{1}= c^{a}_{0}-\frac{a\beta \left( \frac{1}{n},\frac{1}{n}\right) f}{2^{\frac{2}{n}}\beta \left( \frac{2}{n},\frac{2}{n}\right) \root n \of {\frac{(n+1)(n+2)}{2P}}} \frac{4aS}{4a^2S^2-\omega ^{2}(2a-b)^2}. \end{aligned}$$(5.3c) -
Case2. \(k = n/2\), Solitary Wave Solution of GMDFKDV
$$\begin{aligned} u=c^a(t)\left[ \frac{(n+2)(n+4)}{8P}sech^{2}\left( \left( \frac{n}{4}\sqrt{\frac{1}{Q}} (x-c(t)t)\right) c^b(t)\right) \right] ^{\frac{2}{n}}. \end{aligned}$$(5.4)where
$$\begin{aligned} c^a(t)= \frac{a\beta \left( \frac{2}{n},\frac{2}{n}\right) f}{2^{\frac{4}{n}}\beta \left( \frac{4}{n},\frac{4}{n}\right) \left( \root n \of {\frac{(n+2)(n+4)}{8P}}\right) ^2} \left[ \frac{4aS cosh(\omega t)-2\omega (2a-b)sinh(\omega t)}{4a^2S^2-\omega ^{2}(2a-b)^2}\right] +c_{1}e^{-\frac{2aS}{(2a-b)}t}, \end{aligned}$$and the constant
$$\begin{aligned} c_{1}= c^{a}_{0}-\frac{a\beta \left( \frac{2}{n},\frac{2}{n}\right) f}{2^{\frac{4}{n}}\beta \left( \frac{4}{n},\frac{4}{n}\right) \left( \root n \of {\frac{(n+2)(n+4)}{8P}}\right) ^2} \frac{4aS}{4a^2S^2-\omega ^{2}(2a-b)^2}. \end{aligned}$$
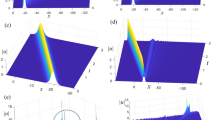
Various topological structures within the framework of solitons corresponding to various combinations of a, and b are shown in Fig. 5 and Fig. 6. The value of other parameters are kept fixed as \(c_0 = 0.5, P = 0.5, Q = 2.5, f = 0.01, \omega = 0.5, S = 0.05, n = 3\) to generate these plots.

Analytical solution of the Generalized KdV Equation for different combinations of a and b. Other parameters are: \(c_0 = 0.5, P = 0.5, Q = 2.5, f = 0.01, \omega = 0.5, S = 0.05, n = 3\).

Analytical solution of the Generalized Modified KdV Equation for different combinations of a and b. Other parameters are: \(c_0 = 0.5, P = 0.5, Q = 2.5, f = 0.01, \omega = 0.5, S = 0.05, n = 3\).
6 Analysis of GKdV and GMKdV Equation with the Help of Pseudo-spectral Method
Consider a Generalized nonlinear evolution equation
To apply Fourier transformation and employ inverse Fourier transformation, let us consider: \(x = Xb\), and \(u(x,t) = v(x/b, t) = v(X, t)\), where \(b = L_1/L\) Then, the GKdV equation becomes
Let the Fourier function is
Taking Fourier transformation on Eq. (6.2), we get
Taking inverse FFT on Eq. (6.4) and using the RK4 method for the Eq. (6.1) is given by
where \( a = -dt f(u), b = -dt f(u + 0.5 a), c = -dt f(u + 0.5 b), d = -dt f(u + c)\).

Pseudo-spectral method with \(k = n\) i.e. the GKdV equation, and \( k = n/2\) i.e. the GMKdV equation where \(n = [1, 2, 3]\) on the Eq. (6.1).

Comparison of the exact solution, the initial solution, and the computational solution with respect to the time t, and the range of the parameters P and Q of Eq. (6.1) at fixed time \(t = 0.01\). Parameters values are \(t = [0.01, 0.05, 0.09]\), \(P = [0.1, 0.5, 0.9]\), and \(Q = [0.1, 0.5, 1.5]\).
In this Sect. 6, with the help of the Pseudo-spectral method, we are comparing the results between the exact solution, the initial solution, and the computational solution concerning the time and various included parameters P, Q, and k. For \(k =n\), and \( k = n/2\), the Eq. (6.1) represents the GKdV and GMKdV equations respectively. In Fig. 7 for \(n = [1, 2, 3]\), \(P = 0.5\), \(Q = 0.25\), \(c = 0.5\), and \(t = 0.01\), we have seen that solitons of both the equations shows the oscillating behaviour with respect to the computational scheme and for higher value of n this scheme will break, Fig. 7 a, b, and c represents for GKdV and d, e, and f represents for GMKdV equations. The effect of time t and included rest parameters P, and Q are also shown in Fig. 8. The soliton will move smoothly with regard to time up until it reaches \(t = 0.05\), as shown by Fig. 8 a, b, and c. At this time, oscillations occur in the soliton with respect to the computational scheme and breaks down but in case of P, this scheme will move smoothly and the amplitude of the soliton will decrease while increasing the value of the nonlinear coefficient \(P = [0.1, 0.5, 0.9]\), shown in Fig. 8 d, e, and f. Figure 8 g, h, and i represent the behaviour of soliton with respect to the dispersion parameter Q and we observed that for \(Q = [0.1, 0.5, 1.5]\), \(P = 0.5\), \(c = 0.5\), \(n =1\), and \( t =0.01\), the width of the soliton will increase, but at \(Q = 1.5\) there exists a small oscillation in the soliton and for this value this scheme will fail. Hence overall, we have observed that with respect to time, k, and dispersion parameters this scheme will fail.
Remark 1
We have observed that this pseudo-spectral scheme will fail with time. To improve the accuracy, we need to move to a better scheme, which may be the modified exponential time differencing method (mETDRK4). This can be the further research work with this problem.
7 Conclusions and Future Work
In this article, to investigate the autonomous GKDV and GMKDV system, the sine cosine method is employed; further, the analytical solution of the non-autonomous part of the said system is derived using the direct assumption technique. Finally, the reliability of the solutions is achieved by numerical investigation. In this connection, it is important to mention that the analytical techniques mentioned here, are not able to find more complex solutions such as rouge wave, breather, etc. Finding such solutions using Hirota’s bi-linear techniques, Darboux transformation remains for a future project. The main outcomes of our investigation can be stated below:
-
We have compared the soliton behaviours of the generalized KDV and generalized Modified KDV equations.
-
In the absence of forcing and damping terms, there is no significant difference between the behaviours except for the non-linear parameter.
-
Visible effects are shown in the behaviour of dynamical systems of GKdV and GMKdV equations. For \(k = n\), the system will always remain unstable and move in an unbounded open orbit. Again, for \(k = \frac{n}{2}\), the system becomes unstable, but the trajectories do not move into open orbit and exhibit compressive behaviour.
-
In the case of GDFKdV and GDFMKdV equations, the Effect of forcing parameters and damping parameters is shown with the help of surface and contour plots. The graphs for the damping parameter make it evident that as the damping coefficient increases, the soliton tends to flatten out from the back. Similarly for the case of forcing term parameter, the soliton acquires the curvature.
-
A visible effect in the behaviour of generalized solutions of both equations is shown with the help of two newly introduced parameters, a, and b. This may represent topological structures such as multiple humps, twisted curved sheets, and pulses of the Gaussian type.
-
With the help of the pseudo-spectral approach, we provide additional support for all of these findings.
-
We have observed that this pseudo-spectral scheme will fail with time and increasing value of exponent parameter n. To improve the accuracy, we need to move to a better scheme, which may be the modified exponential time differencing method (mETDRK4) [5]. This can be the subject of further research work on this problem.
References
Ablowitz, M.J., Clarkson, P.A.: Solitons, Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Aslanov, V.S., Yudintsev, V.V.: Dynamics, analytical solutions and choice of parameters for towed space debris with flexible appendages. Adv. Space Res. 55, 660–667 (2015)
Debnath, L., Basu, K.: Nonlinear water waves and nonlinear evolution equations with applications. Encycl. Complex. Syst. Sci. 1–59 (2014)
Dubey, V.P., Singh, J., Alshehri, A.M., Dubey, S., Kumar, D.: Analysis of local fractional coupled Helmholtz and coupled Burgers’ equations in fractal media. AIMS Math. 7(5), 8080–111 (2022)
Fabien, M.S.: Spectral methods for partial differential equations that model shallow water wave phenomena. Ph.D. Dissertation (2014)
Ghanbari, B., Kumar, D., Singh, J.: Exact solutions of local fractional longitudinal wave equation in a magneto-electro-elastic circular rod in fractal media. Indian J. Phys. 96(3), 787–94 (2022)
Guckenheimer, J., Holmes, P.: Nonlinear oscillations, dynamical systems and bifurcations of vector fields. J. Appl. Mech. 51(4), 947 (1984)
Hirota, R.: Exact Solution of the Korteweg-de Vries Equation for Multiple Collisions of Solitons. Phys. Rev. Lett. 27(18), 1192–1194 (1971). https://doi.org/10.1103/physrevlett.27.1192
Jawad, A.J.M., Petković, M.D., Biswas, A.: Modified simple equation method for nonlinear evolution equations. Appl. Math. Comput. 217(2), 869–877 (2010)
Kudryashov, N.A.: Exact solutions of the generalized Kuramoto-Sivashinsky equation. Phys. Lett. A 147(5–6), 287–291 (1990). https://doi.org/10.1016/0375-9601(90)90449-x
Pankaj, R.D., Kumar, A., Singh, B., Meena, M.L.: Exp (-\(\phi (\xi )\)) expansion method for soliton solution of nonlinear Schrödinger system. J. Interdisc. Math. 25(1), 89–97 (2022)
Pankaj, R.D., Lal, C., Kumar, A.: New expansion scheme to solitary wave solutions for a model of wave-wave interactions in plasma. Sci. Technol. Asia 49–59 (2021)
Raut, S., Roy, S., Kairi, R.R., Chatterjee, P.: Approximate analytical solutions of generalized zakharov-kuznetsov and generalized modified zakharov-kuznetsov equations. Int. J. Appl. Comput. Math. 7(4), 1–25 (2021)
Raut, S., Roy, A., Mondal, K.K., et al.: Non-stationary solitary wave solution for damped forced kadomtsev-petviashvili equation in a magnetized dusty plasma with q-nonextensive velocity distributed electron. Int. J. Appl. Comput. Math. 7, 223 (2021). https://doi.org/10.1007/s40819-021-01168-2
Rogers, C., Shadwick, W.R.: Bätransformations and Their Application Mathematics in Science and Engineering, vol. 161. Academic Press, New York (1982)
Roy, S., Raut, S., Kairi, R.R., et al.: Integrability and the multi-soliton interactions of non-autonomous Zakharov-Kuznetsov equation. Eur. Phys. J. Plus 137, 579 (2022). https://doi.org/10.1140/epjp/s13360-022-02763-y
Roy, S., Raut, S., Kairi, R.R., et al.: Bilinear Bäcklund, lax pairs, breather waves, lump waves and soliton interaction of (2+1)-dimensional non-autonomous Kadomtsev-Petviashvili equation. Nonlinear Dyn. 111, 5721–5741 (2022). https://doi.org/10.1007/s11071-022-08126-7
Sen, A., Tiwari, S., Mishra, S., Kaw, P.: Nonlinear wave excitations by orbiting charged space debris objects. Adv. Space Res. 56(3), 429 (2015)
Singh, J., Gupta, A., Baleanu, D.: On the analysis of an analytical approach for fractional Caudrey-Dodd-Gibbon equations. Alex. Eng. J. 61(7), 5073–82 (2022)
Wazwaz, A.M.: The tanh-coth method for solitons and kink solutions for nonlinear parabolic equations. Appl. Math. Comput. 188(2), 1467–1475 (2007). https://doi.org/10.1016/j.amc.2006.11.013
Wazwaz, A.M.: A sine-cosine method for handling nonlinear wave equations. Math. Comput. Model. 40, 499–508 (2004)
Zuo, J.M., Zhang, Y.M.: The Hirota bilinear method for the coupled Burgers equation and the high-order Boussinesq-Burgers equation. Chin. Phys. B 20(1), 010205 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Tomar, S., Chadha, N.M., Raut, S. (2023). Generalized Solitary Wave Approximate Analytical and Numerical Solutions for Generalized Damped Forced KdV and Generalized Damped Forced MKdV Equations. In: Singh, J., Anastassiou, G.A., Baleanu, D., Kumar, D. (eds) Advances in Mathematical Modelling, Applied Analysis and Computation . ICMMAAC 2022. Lecture Notes in Networks and Systems, vol 666. Springer, Cham. https://doi.org/10.1007/978-3-031-29959-9_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-29959-9_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-29958-2
Online ISBN: 978-3-031-29959-9
eBook Packages: EngineeringEngineering (R0)