
Abstract
We consider the unsteady problem of elastic diffusion deformations of a rectangular orthotropic plate considering the diffusion fluxes relaxation. External perturbations lay in the plate plane and allow us to use a two-dimensional elastic diffusion model for continuum as a mathematical model. The solution is convolutions of Green’s functions with functions defining the boundary perturbations. Green’s functions finding method is based on the Laplace transform and double trigonometric Fourier series. We are using residues and tables of operational calculus for transition to the originals of Green’s functions. The interaction effects of mechanical and diffusion fields for a three-component material are calculated using the example of a rectangular plate under tensile forces. We have also investigated the influence of relaxation processes on mass transfer kinetics. Calculation results are in analytical and graphical forms.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
9.1 Introduction
Issues related to the strength study include static/dynamic materials tests and consideration of different physical fields interaction. This is due to various modern structures and different conditions of their operation. It is often necessary to consider the interaction between mechanical, diffusion, temperature and other fields in applied calculations.
Experimental study of the interaction between mechanical and diffusion fields began in the 20s of the twentieth century. Many scientific theories have been formed that allow describing the coupled mechanical, diffusion and other fields in a solid medium. Among the most recent works are [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16]. Various aspects of mechanodiffusion processes modelling are considered here: beginning with initial–boundary problem formulation and ending with a description of methods for solving these problems. Here are stationary [4, 11, 12] and unsteady problems [1,2,3, 5,6,7,8, 13,14,16].
The main complexity is the Laplace inverse transform when solving mechanodiffusion problems analytically. It is often used in solving initial–boundary problems. The Durbin method [2, 3, 7, 8, 14] or similar algorithms based on the fact that the Mellin integral is expressed through the inverse Fourier transform are used here. Special quadrature formulas [1, 5, 15] allow to calculate the integral. These methods have proven themselves in calculating the originals in a certain class of functions. However, these algorithms are not suitable for Green’s functions because they belong to the generalized function class, and it is difficult to use numerical integration methods in this case.
Numerical algorithms based on finite difference methods [6, 13] and the finite element methods [16] are an alternative to analytical methods. In addition, numerical methods are the only way to solve the boundary value problem in some cases. A disadvantage of numerical methods is that solution comes to a discrete set of values, which is difficult to analyse and investigate later. A rather complicated mathematical problem is the question of algorithm stability and convergence.
This article proposes an analytical method for solving the unsteady mechanodiffusion problem for a rectangular plate. The method implies the Laplace transform and Fourier series expansion in eigenfunctions of the elastic diffusion operator. This approach has been tested for one-dimensional problems of elastic diffusion and thermoelastic diffusion [17, 18].
9.2 Problem Formulation
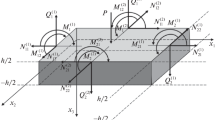
We considered a multicomponent rectangular plate under the action of unsteady longitudinal forces. The resulting mass transfer and diffusion flux relaxations are taken into account inside the plate.
The mathematical model describing two-dimensional elastic diffusion processes for a homogeneous orthotropic medium in the rectangular Cartesian coordinate system [19, 20]:
Here, all quantities are dimensionless. Their relation to their dimensional counterparts (when written the same way, they are indicated with a dash) is defined as follows:
where t is a time parametr; \(x_{i}^{*} \) is a rectangular Cartesian coordinate; \(u_{i}^{*} \) is a displacement vector component; L is the diagonal size of the plate having dimensions \(l_{1}^{*} \times l_{2}^{*} \); \(\eta _{q} \) is the concentration increment of “q”th component in \(N+1\)-component medium; \(n_{0}^{\left( q\right) } \) is the initial concentration of “q”th component; \(C_{ijkl} \) is the component of elastic constants tensor; \(\rho \) is a mass density; \(\alpha _{ij}^{\left( q\right) } \) is a coefficient characterizing the volume change of the medium due to diffusion; \(D_{ij}^{\left( q\right) } \) is a diffusion coefficient; R is the universal gas constant; \(T_{0} \) is an average temperature; \(m^{\left( q\right) } \) is a molar mass of “q”th component, \(f_{klm}^{*} \) is an external perturbation; \(\tau ^{\left( q\right) } \) is the relaxation time of the diffusion flux.
We assume the initial conditions are zero.
9.3 Integral Representation of the Solution
The solution to the problem is sought in the integral form as follows:
where \(G_{mkl} \) are Green’s functions, which satisfy the following initial–boundary value problem (initial conditions are zero):
9.4 Algorithm for Green’s Functions
To find the Green’s functions, we apply the Laplace transform to (9.5) and (9.6) and then represent the unknown functions as a double Fourier series. Let’s multiply the first equation in (9.5) by \(\cos \mu _{m} x_{1} \sin \lambda _{n} x_{2} \), the second by \(\sin \mu _{m} x_{1} \cos \lambda _{n} x_{2} \), and the rest by \(\sin \lambda _{n} x_{1} \sin \mu _{n} x_{2} \) (\(\mu _{m} =\pi m/l_{1} \), \(\lambda _{n} =\pi n/l_{2} \)). Then we integrate into the rectangle \(\left[ 0,l_{1} \right] \times \left[ 0,l_{2} \right] \) and obtain the following system of linear algebraic equations:
Below are the systems of equations for the zero harmonics:
The solution of the systems (9.7) and (9.10) has the following form:
where
The transition to the original domain is done by residues and tables of operational calculus as follows [21]:
9.5 Calculation Example
Let us take a three-component material (\(N=2\), independent components, zinc and copper, diffusing into aluminium) with the following characteristics [22]:
Assume that the plate is under the action of tensile forces applied to the boundaries \(x_{1} =0\) and \(x_{1} =l_{1} \):
where \(H\left( \tau \right) \) is the Heaviside function.
All other load parameters in the boundary conditions (9.2) are assumed to be zero. Calculating the convolutions (9.4), we obtain
The calculation results are shown in the Figs. 9.1, 9.2, 9.3, 9.4, 9.5, 9.6, 9.7 and 9.8. Figures 9.1, 9.2, 9.3 and 9.4 show dependences of longitudinal displacements \(u_{i}\) on time and coordinates. Calculations show that diffusion processes at the initial stages of deformation do not affect the displacement field. At initial times, the elastic and elastic diffusion displacements coincide.

Displacement \(u_{1} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{2} ={l_{2}/ 2} \)

Displacement \(u_{1} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{1} ={l_{1}/ 4} \)

Displacement \(u_{2} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{2} ={l_{2}/ 4} \)

Displacements \(u_{2} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{1} ={l_{1}/ 2} \)
Figures 9.5 and 9.6 show the zinc and copper concentration increments, respectively, caused by longitudinal deformations.

Zinc concentration increment \(\eta _{1} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{1} ={l_{1}/ 2} \)

Copper concentration increment \(\eta _{2} \left( x_{1} ,x_{2} ,\tau \right) \) at \(x_{1} ={l_{1}/ 2} \)
The influence of relaxation effects on the mass transfer kinetics is shown in Figs. 9.7 and 9.8. Here, different lines show zinc concentration increments for models with a finite and infinite speed of diffusion fluxes. The relaxation effects manifest themselves at some finite interval of time and then disappear. Thus, in Fig. 9.8, corresponding to the time \(\tau =10^{9} \), both curves already coincide.

Zinc concentration increment \(\eta _{1} \left( x_{1} ,x_{2} ,\tau \right) \). The solid line corresponds to the time \(\tau ^{\left( q\right) } =200\) s, the dotted line to \(\tau ^{\left( q\right) } =0\)

Zinc concentration increment \(\eta _{1} \left( x_{1} ,x_{2} ,\tau \right) \). The solid line corresponds to the time \(\tau ^{\left( q\right) } =200\) s, the dotted line to \(\tau ^{\left( q\right) } =0\)
9.6 Conclusions
We propose a mathematical model describing the effects of the interaction between mechanical and diffusion fields during a rectangular orthotropic plate deformation. The algorithm is developed for finding Green’s functions based on Laplace transform and decomposition into trigonometric Fourier series. It allows us to reduce the general problem of Laplace transform inversion to the problem of rational function inversion. Originals of Green’s functions are found using residues and tables of operational calculus. As a result, it is possible to obtain the solution in analytical form, which provides ample opportunities for various kinds of numerical experiments.
The effect of interaction between the mechanical and diffusion fields is demonstrated by the example of a rectangular plate under the action of tensile forces. Unsteady loads initiate the process of mass transfer. At the same time, the relaxation diffusion processes reduce with time. The kinetics of mass transfer at significant times can be described by classical mechanodiffusion with the infinite speed of diffusion fluxes. All results are presented in analytical and graphical forms.
References
Abbas AI (2015) Eigenvalue approach on fractional order theory of thermoelastic diffusion problem for an infinite elastic medium with a spherical cavity. Appl Math Model 39(20):6196–6206
Afram AY, Khader SE (2014) 2D problem for a half-space under the theory of fractional thermoelastic diffusion. Am J Sci Ind Res 6(3):47–57
Aouadi M (2005) Variable electrical and thermal conductivity in the theory of generalized thermoelastic diffusion. Z Angew Math Phys 57(2):350–366
Bachher M, Sarkar N (2016) Fractional order magneto-thermoelasticity in a rotating media with one relaxation time. Math Model Eng 2(1):57–68
Bhattacharya D, Kanoria M (2014) The influence of two temperature generalized thermoelastic diffusion inside a spherical shell. Int J Eng Tech Res (IJETR) 2(5):151–159
Deswal S, Kalkal KK, Sheoran SS (2016) Axi-symmetric generalized thermoelastic diffusion problem with two-temperature and initial stress under fractional order heat conduction. Phys B 496:57–68
Elhagary MA (2013) A two-dimensional generalized thermoelastic diffusion problem for a half-space subjected to harmonically varying heating. Acta Mech 224:3057–3069
El-Sayed AM (2016) A two-dimensional generalized thermoelastic diffusion problem for a half-space. Math Mech Solids 21(9):1045–1060
Freidin A, Morozov N, Petrenko S, Vilchevskaya E (2016) Chemical reactions in spherically symmetric problems of mechanochemistry. Acta Mech 227(1):43–56
Indeitsev DA, Semenov BN, Sterlin MD (2014) The phenomenon of localization of diffusion process in a dynamically deformed solid. Dokl Phys 11:299–319
Kumar R, Ahuja S, Garg SK (2014) Latin Am J Solids Struct Mater Phys Mech 11:299–319
Kumar R, Chawla V (2012) A study of Green’s functions for two-dimensional problem in orthotropic magnetothermoelastic media with mass diffusion. Mater Phys Mech 15:78–95
Parfenova ES, Knyazeva AG (2021) The influence of chemical reaction parameters on the interaction of thermal, diffusion and mechanical waves in the condition of surface treatment by particles beam. Comput Contin Mech 14(1):77–90
Sherief HH, El-Maghraby NM (2009) A thick plate problem in the theory of generalized thermoelastic diffusion. Int J Thermophys 30:2044–2057
Tripathi JJ, Kedar GD, Deshmukh KC (2015) Two-dimensional generalized thermoelastic diffusion in a half-space under axisymmetric distributions. Acta Mech 226:3263–3274
Zhang J, Li Y (2014) A two-dimensional generalized electromagnetothermoelastic diffusion problem for a rotating half-space. Math Probl Eng 2014(964218): 12
Davydov SA, Zemskov AV, Tarlakovskii DV (2015) An elastic half-space under the action of one-dimensional time-dependent diffusion perturbations. Lobachevskii J Math 36(4):503–509
Davydov SA, Zemskov AV (2022) Thermoelastic diffusion phase-lag model for a layer with internal heat and mass sources. Int J Heat Mass Transf 183(C):122213
Zemskov AV, Tarlakovskii DV (2019) Bulk Green’s functions in two-dimensional coupled unsteady problems of elastic diffusion for orthotropic continuum. Lobachevskii J Math 40(3):375–383
Igumnov LA, Tarlakovskii DV, Zemskov AV (2017) A two-dimensional nonstationary problem of elastic diffusion for an orthotropic one-component layer. Lobachevskii J Math 38(5):808–817
Ditkin VA, Prudnikov AP (1965) Handbook on operational calculus. Vysshaya Shkola, Moscow [In Russian]
Grigoriev IS, Meylikhov IZ (eds) (1991) Fizicheskiye velichiny: Spravochnik. Energoatomizdat, Moscow [In Russian]
Acknowledgements
This work was supported by the Russian Science Foundation (project No 20-19-00217).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Davydov, S.A., Vestyak, A.V., Zemskov, A.V. (2023). Unsteady Longitudinal Mechanodiffusion Vibrations of a Rectangular Plate with Inner Diffusion Flux Relaxation. In: Altenbach, H., Eremeyev, V.A., Igumnov, L.A., Bragov, A. (eds) Deformation and Destruction of Materials and Structures Under Quasi-static and Impulse Loading. Advanced Structured Materials, vol 186. Springer, Cham. https://doi.org/10.1007/978-3-031-22093-7_9
Download citation
DOI: https://doi.org/10.1007/978-3-031-22093-7_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-22092-0
Online ISBN: 978-3-031-22093-7
eBook Packages: EngineeringEngineering (R0)