
Abstract
The paper presents a preliminary design activity and virtual prototyping of an innovative boat equipped with hydrofoils and hybrid propulsion, with the aim of extending the foil technology from the field of competition boats to recreational day-cruiser yachts and creating a craft with minimal environmental impact. Hydrofoils allow boats to rise from the water, greatly reducing resistance and increasing performance. The current work dealt with the preliminary design of a daysailer with foil technology and hybrid propulsion that allow to combine green and comfortable navigation both under sail and motor and that, when required, can sail in a more performing way by exploiting the foil technology and the thrust of the wind. After having deepened the theory and physics of sailing on foils, a MATLAB code was created to integrate the stability equations that characterize hydrofoil sailboats: connecting the acting forces and allowing to define the dimensions of the geometries, the code was fundamental in speeding up the iterative preliminary design process. The next step was to model the geometry of the hull and the appendages in the CAD environment and, subsequently, the wing movement mechanism so that it could both manage the incidence of the wings and retract the foils when the boat is moored. The hull, profiles, and wings were subsequently placed in a CFD and VPP virtual environment for testing their resistance. Future developments will include a detailed design and the physical prototyping of a first boat for water testing.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In the last decade, in the world of boating and racing sailing, the creation of ultra-performing boats is becoming increasingly popular which, with the use of foil or hydrofoil, can reach very high speeds, unthinkable for any type of displacement or planing boat. In foiling navigation, the only surfaces that remain submerged underwater are the foil appendages (main and wheelhouse) and since the hull no longer interacts directly with the sea, the drag decreases (composed by pressure and friction drag), increasing the speed of navigation of the boat and improving the comfort for the crew. The paper presents a preliminary design activity and virtual prototyping of an innovative boat equipped with hydrofoils and hybrid propulsion, with the aim of extending the foil technology from the field of competition boats to recreational day-cruiser yachts and creating a craft with minimal environmental impact.
2 State of Art
There are those who claim, based on some sketches found, that even Leonardo da Vinci had already had the intuition of the multihull with hydrofoil [1]. The first examples of the construction of “flying” boats date back to the early 1900s, thanks to the studies carried out by officer Eng. Enrico Forlanini managed to create the first hydrofoil prototype by modifying a hydroplane, adding a structure with supporting fins. A few years later, at the Italian Air Force base in Bracciano, the tests on aeronautical propulsion engines and propellers were carried out using hydroplanes with hydrofoils such as the “Barchino Idroplano” designed and built by the engineers of the Genio Militare Italiano, Arturo Crocco and Ottavio Ricaldoni and preserved in the A.M. Museum of Bracciano. The first prototype of a hydrofoil sailboat was born in the 1950s in the United States when US Admiral Gordon Baker built the first prototype of the “Monitor”. The boat, conceived as a US Navy spy vehicle, could rise on the hydrofoils with about 13 kn of wind. In some tests it reached speeds between 30 and 40 kn. In the 1960s, the technology of hydrofoils for civilian uses took hold in the world of nautical transport, many boats were built that allowed rapid movements on rivers, lakes and at sea. These boats are still used today for the transport of civilians in not excessively formed sea conditions. Hydrofoils make their appearance in the world of sports boating in the early 2000s with the creation of the first surfboards, windsurfing, multihulls and sup. In 2009 the Hydroptère, a trimaran equipped with foil piercing, set a new speed record for a sailboat exceeding 52 kn. The real boom in the world of sailing takes place thanks to the 34th America’s Cup (2013) held with the AC72 catamarans equipped with hydrofoil fins that allow, for the first time in the history of sailing, to reach speeds of over 40 kn in regatta. The Olympic federation includes, among the sailing classes participating in the Olympics, the Nacra17 from Tokyo 2020 and the iFoil windsurfing from Paris 2024.
The final term of the technology regarding foiling technology is represented by the AC75 class, built for the 36th America's Cup (2021): the 21-m monohull uses two weighted “arms” to generate both the lift sufficient to lift the hull from the water and the necessary straightening moment.
3 Introduction to the Foil-Sailing Theory
3.1 The Lift Generated by a General Wing
For a generic foil profile placed in a single-phase fluid or in a mono fluid, lift is calculated with the follow [2]:
where, \(\rho\) is the density of the fluid \(\left[ {\frac{{{\text{kg}}}}{{{\text{m}}^3 }}} \right]\), \(S\) is the wing surface in plan \(\left[ {{\text{m}}^2 } \right]\), \(w_\infty\) is the relative speed fluid-profile \(\left[ {\frac{{\text{m}}}{{\text{s}}}} \right]\), \(C_L\) is the Lift Coefficient, which is function of the angle of attack and the characteristic of profile.
3.2 The Behavior of a Wing in Water
A hydrofoil interacts both with the water in which it is immersed and with the air that is above the free surface, consequently, it is possible to say that when a wing is at a dive greater than 1.5 chord it does not affect by the disturbance effect of the free surface, in the opposite case, there is a decrease in the hydrodynamic resultant determined by an empirical multiplicative coefficient which can be called Submergence Factor [3]:
Consequently, the lift for hydrofoils can be obtained as:
3.3 Introduction to the Stability of a Foiling Sailboat
If considered a boat equipped with foil that accelerates thanks to the force generated by the sails, three phases of navigation can be distinguished. In the beginning, the speed of the boat is not sufficient to generate enough lift to allow take-off. The stability of the boat is studied with the classical physics of displacement boats.
Accelerating, the boat reaches a speed called “take-off speed”: the hull is partially still immersed in water. In this phase the resistance of the boat is maximum and cavitation or ventilation of the wing can occur.
After the take-off of the hull, the sailing is full foiling, the only surfaces that are immersed in water are the foils. In this phase the stability of the boat can be treated in a very similar way to the stability of an airplane in flight. Considering a reference system \(x,y,z\) (Fig. 1) it is possible to evaluate the stability of the boat.

Reference system for stability studies
Pitch Stability in Foiling.
Considering the boat in foiling navigation, in the \(z\) direction of the xz plane the balance of forces turns out to be:
where the weight force \(W\) is applied in the center of gravity \(G\), while the main foils and those of the rudder generate a lift equal to foil lift \(L_F\) and rudder lift \(L_R\), and the keel generates a keel lift \(L_K\) (Fig. 2).
On the horizontal plane in the \(x\) direction the following forces acting on the boat can be identified:

Equilibrium on the boat in foiling
Lift force \(L_F\) is placed at a distance \(a_F\) from the center of gravity of the boat and, for this reason, it generates a nose-up moment which tends to raise the bow; in opposition there is the force \(L_R\) applied at a distance \(a_R\) from the center of gravity of the boat, counterbalancing the nose-up moment generated by the main foils.
Sails and foils, with the forces \(\vec{F}_{S,xz}\), \(\vec{D}_F\), \(\vec{D}_R\), \(\vec{D}_K\) respectively applied to distances \(h\), \(d_F\), \(d_R\) and \(d_K\), produce a nose-down moment which must be counterbalanced by the generated by the lift of the main foil \(\vec{L}_F\) and the weight force \(\vec{W}\) of the boat.
The total equilibrium of the moments acting on the boat in the \(xz\) plane with respect to the reference system in \(G\) appears to be:
A fundamental function of the rudder foil is to stabilize the boat in the event of a sudden gust, exactly as the horizontal tail in airplanes.
Increasing the force \(\vec{F}_{S,xz}\) the boat will tend to a nose-down sailing, the rudder profile will have to generate sufficient downforce (or lift) to stabilize the boat.
Roll and Heeling Stability in Foiling.
Considering the boat in foiling navigation, in the \(yz\) plane (roll) and \(xy\) plane, the static and moment balance will be guaranteed by the thrust of the sails, the weight force of the boat and the lift force generated by the submerged surfaces. As for the pitch, to obtain the balance of the boat, the equations for the balance of forces and moments have been written in a similar way.
4 Basic Design and Virtual Prototyping of “ROMa 33” Project
4.1 Hull Concept
The first step was to analyze in depth projects already carried out. The key points of the boat design were the following:
-
Hull length less than 10 m (33 ft) and generous hull beam to improve stability and habitability on board.
-
A voluminous bow that can reduce the risk of broaching and, potentially of capsizing.
-
Sufficient internal and external spaces for good general comfort.
-
Light displacement, to achieve better performance, the lowest resistance in displacement sailing and the maneuverability of the boat.
-
Not high foiling navigation speeds, being a daily cruiser and managed by a control system.
-
The appendages shall be designed to generate sufficient lift at the take-off speed, approximately 10–11 kn, and to sail the boat in a stable way at the cruise speed of 18–20 kn.
-
Possibility of converting part of the ballast with metal hydrides to store energy to be exploited in a hybrid propulsion system.
As a preliminary basis for defining the fundamental quantities of the boat and the hydrofoils, a MATLAB code was created by numerically implementing the fundamental mathematical relations that could provide the quantities to be adopted in the design and allowing a faster iterative process of component sizing (Fig. 3).

Flowchart of the iterative process of component sizing
Hypothesized Sail Plan.
The sail plan has been studied with reference to projects already completed and to generate sufficient thrust for both displacement and foiling navigation. Through simulations, an average and maximum thrust generated by the sails was obtained which was then used to study the stability of the boat and to identify where to best position the thrust centers of the appendages [4, 5] (Table 1).
4.2 Hull Design
Hull modeling was done using NURBS Rhinoceros surface modeling software. The first step in the design of the hull was to freehand draw a rough geometry that could respect the key points of the project. The drawing was then scanned and imported into the software where the real virtual design began.
Hull Curves.
The fundamental element for the realization of the surfaces of the boat are the basic lines of the hull and can be compared to the “skeleton” of the geometry. The hull lines were drawn several times making sure that each line was faired as much as possible and did not have excessive curvature or negative curvature (Fig. 4).

Basic curves of “Roma 33” hull.
Check the Water Lines and Surfaces.
In the first phase, the lines obtained from the plane-surface intersection showed irregularities such as drafts or negative curvatures. It was necessary to modify the geometries of the initial curves of the skeleton in an iterative process until the water lines were as faired and regular as possible.
The creation of clean and homogeneous water lines in the curvature allows to optimize the efficiency of the hull and to decrease the hydrodynamic resistance.
The final step was to verify that all surfaces match perfectly forming a closed geometry that can be converted into a solid if desired. The closed project has been exported and inserted in the programs (CFD, rendering, etc.) to visualize the virtual prototype in a realistic aspect and perform needed analyses [6, 7].
Materials and Weight of the Hull.
The estimated weights for the hull and for the fin to generate a sufficient righting moment are shown in the following table (Table 2).
4.3 Hydrofoil Design
The boat, not designed as a competition boat, must be designed to navigate in foiling mode in a stable way, without reaching extreme speeds for safety reasons and offering minimal hydrodynamic resistance.
The key features of the designed wing are as follows:
-
T configuration: the balancing of forces even at lower speeds is better manageable than a classic L configuration foil which for construction reasons would generate a more distant lift vector, with a consequent greater righting moment and requiring greater thrust of the sails to balance the boat.
-
Minimization of the interference friction between the stem and the wing by creating geometry with angles greater than 90°.
-
Insertion of winglets with NACA 63–412 profile, scaled by a factor of 2 in height, at the ends to reduce edge effects and induced drag.
NACA 63–412.
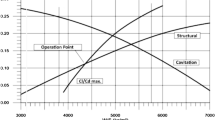
The chosen profile for the hydrofoil is the NACA 63–412 which guarantees excellent CL-CD performance in the hypothesized sailing conditions and has been extensively tested on the wings already made in other foiling racing sailboats (Fig. 5).

CL vs CD and CL vs Alpha for NACA 63–412.
The wing have been tried to work in the minimum of CL-CD diagram. The characteristic curves of NACA 63–412 are evaluated at different Reynolds numbers and angles of incidence obtained with the X-Foil software and compared with the values obtained by literature [8].
NACA 63–012.
The symmetrical profile NACA 63–012 was chosen for the vertical stem of the hydrofoils as for the horizontal wings of the rudders [9]. The horizontal wings of the rudders will consist of a fixed part and a movable flap placed at 70% of the chord from the leading edge linked with the control system to stabilize the boat at various flight conditions [10].
Foil Mechanism Sketch.
The hydrofoil movement mechanism is composed of a box in which the wing stem can slide. It is contained in a structure on which it is hinged and can move through a hydraulic actuator to change the angle of the wing (Fig. 6).
The mechanism has two basic functions:
-
Allowing the stem of the foil to enter and exit easily.
-
Change the angle of attack of the main wing.

Conceptual 3D of foil mechanism.
4.4 Positioning of the Bulkhead Containing the Hydrofoil
Since it is impossible to guarantee the complete seal of the mechanism that allows the extension and control of the foil, a watertight bulkhead has been designed that contains the entire wing movement system. This compartment must be inspectable both from the inside and from the outside of the boat and its characteristics are as follows:
-
The lower surface of the bulkhead was designed above sea level and with a slight slope to let the water flow towards the outside of the bulkhead.
-
In correspondence with the bulkhead, a hole is made on the hull with a shell-shaped sea intake applied to allow the water inside the bulkhead to flow outside.
-
Stiffening and thickening of the hull in the surfaces close to the mechanism in order to resist the forces acting.
5 Roma 33 Performance Simulations
Hull Displacement Drag Simulation.
To test the performance of the built hull, it was possible to test the hull in a “virtual naval tank” using classical numerical methods and comparing the results obtained with those of an already built “Melges 32” racing hull with a length of 32 ft (Fig. 7).

Resistance displacement test for classic racing hull.
From the analyses carried out, the design of the hull of “Roma 33” significantly reduces the force of resistance to advancement with respect to the reference boat according to all the mathematical models.
VPP – Velocity Prediction Program (displacement).
The VPP simulation made it possible to estimate the performance of the boat at different wind speeds and at different speeds when it is in displacement navigation. The result obtained indicates that the performance of the designed hull of Roma 33 is superior to the reference racing hull (Tables 3 and 4).
5.1 Main Hydrofoil CFD Analysis
Using the Numeca Fine Marine CFD (FV-Based) software it was possible to simulate the hydrofoil designed in a multi-fluid environment. The analyses carried out in the current work were used to assess whether the created geometry generates the thrust necessary to lift the boat from the free surface of the water in which it navigates. CFD analyses are made at the take-off condition and in the cruise condition [11]. In the two different situations, the lift generated is enough to take off the boat out of the water.
5.2 Overall Appendices CFD Analysis
The CFD simulation of the total surfaces also served to evaluate how the various wings interact [12]. Through a visual analysis of the flow lines, the rudders, the main hydrofoil and the keel are positioned so as not to affect each other (Fig. 8).

Interaction between main hydrofoil and rudder
5.3 Hydrogen Propulsion and Hydrides
As for the energy that can be accumulated on board through the hydrides, referring to the replacement of a ballast of 800 kg and a hydride with a gravimetric density of 5%, up to 40 kg of hydrogen can be accumulated, for an energy content, calculated on the lower calorific value, equal to 3600 MJ. This is equivalent to about 100 kg of diesel, enough to get the boat moving without constant refueling problems.
6 Conclusion
A basic design activity and virtual prototyping of an innovative boat equipped with hydrofoils and hybrid propulsion have been reported, with the aim of extending the foil technology from the field of competition boats to recreational day-cruiser yachts and creating a craft with minimal environmental impact.
The hydrofoils designed with the movement mechanism allow the Roma 33 boat to rise from the water guaranteeing foiling navigation. During displacement navigation, the designed hull allows to drastically reduce resistance by increasing the navigation range for the same energy used.
The use of a ballast formed by metal hydrides instead of the classic steel or lead allows the implementation of a hydrogen hybrid propulsion system.
References
Lodigiani, P.: Un’introduzione al Capire e Progettare Barche. Bca Demco Kit (2004)
Lodigiani, P.: Capire e Progettare le Barche: Aero e Idrodinamica Della Barca a Vela. Manuale per Progettisti Nautici, Hoepli (2015)
Vellinga, R.: Design. Peacock Hill Publishing, Build, Fly (2009)
Calì, M., Speranza, D., Cella, U., Biancolini, M.E.: Flying shape sails analysis by radial basis functions mesh morphing. In: Rizzi, C., Andrisano, A.O., Leali, F., Gherardini, F., Pini, F., Vergnano, A. (eds.) ADM 2019. LNME, pp. 24–36. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-31154-4_3
Calì, M., Oliveri, S.M., Cella, U., Martorelli, M., Gloria, A., Speranza, D.: Mechanical characterization and modeling of downwind sailcloth in fluid-structure interaction analysis. Ocean Eng. 165, 488–504 (2018). https://doi.org/10.1016/j.oceaneng.2018.07.011
Papa, S., Lanzotti, A., Di Gironimo, G., Balsamo, A.: A new interactive railway virtual simulator for testing preventive safety. In: WIT Transactions on the Built Environment, vol. 181, pp. 367–378, ISSN: 1746-4498 (2018). https://doi.org/10.2495/CR18033
Lanzotti, A., et al.: Interactive tools for safety 4.0: virtual ergonomics and serious games in tower automotive. In: Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y. (eds.) IEA 2018. AISC, vol. 822, pp. 270–280. Springer, Cham (2019). https://doi.org/10.1007/978-3-319-96077-7_28
Abbot, J.: Theory of Wing Section including a Summary of Airfoil Data (1959)
Larsson, L., Eliasson, R.E.: Principles of Yacht Design. Adlard Coles Nautical (2000)
Cella, U., Salvadore, F., Ponzini, R.: Coupled Sail and Appendage Design Method for Multihull (2016)
Ferdinando, M.: Analisi e Sviluppo di Imbarcazioni a Sostentamento Idrodinamico (2016)
Numeca Fine Marine. Documentation and Tutorials (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Speranza, D., Di Bernardo, R., Martorelli, M., Gloria, A., Pensa, C., Papa, S. (2023). Basic Design and Virtual Prototyping of a Hydrofoil Hybrid Daysailer. In: Gerbino, S., Lanzotti, A., Martorelli, M., Mirálbes Buil, R., Rizzi, C., Roucoules, L. (eds) Advances on Mechanics, Design Engineering and Manufacturing IV. JCM 2022. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-15928-2_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-15928-2_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-15927-5
Online ISBN: 978-3-031-15928-2
eBook Packages: EngineeringEngineering (R0)