
Abstract
Rehabilitation robots have become an important tool to complement rehabilitation training in patients with neurological disorders such as stroke and spinal cord injury. Arm rehabilitation robots can create a motivational, activity-based environment supporting an intensive rehabilitation training with frequent and numerous repetitions. Therefore, robots have the potential to improve the rehabilitation process in patients with lesions of the central nervous system. In this chapter, the three-dimensional, multi-degree-of-freedom ARMin arm robot, and the related ChARMin and Armeo Power robots, are presented. The devices have an exoskeleton structure that enables the training of activities of daily living. Patient-responsive control strategies assist the patient only as much as needed and stimulate patient activity. This chapter covers the mechanical setup, the therapy modes, and the clinical evaluation of the exoskeleton robots. It concludes with an outlook on ongoing developments.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 State of the Art
1.1 Rationale for Application of Current Technology
Stroke remains the leading cause of permanent disability: Recent studies estimate that it affects more than one million people in the European Union [1, 2] and more than 0.7 million in the United States each year [3]. The major symptom of a stroke is severe sensory and motor hemiparesis of the contralesional side of the body [4]. The degree of recovery depends on the location and the severity of the lesion [5]. However, only 18% of stroke survivors regain full motor function after 6 months [6]. Restoration of arm and hand function is essential to resuming daily living tasks and regaining independence in life. Several studies show that sensorimotor arm therapy has positive effects on the rehabilitation progress of stroke patients [7–9].
The goal is to induce brain plasticity and improve functional outcomes. Relevant factors for successful therapy are training intensity [10–12] including frequency, duration [13, 14], and repetition [15]. With respect to these criteria, one-to-one manually assisted training has several limitations. It is labor-intensive, time-consuming, and expensive. The disadvantageous consequence is that the training sessions are often shorter than required for an optimal therapeutic outcome. Finally, manually assisted movement training lacks repeatability and objective measures of patient performance and progress.
Some shortcomings can be overcome by the use of robotics. With robot-assisted arm therapy, the number and duration of training sessions can be increased while reducing the number of therapists required per patient can potentially be reduced. Thus, it is expected that personnel costs can be reduced. Furthermore, robotic devices can provide quantitative measures and they support the objective observation and evaluation of the rehabilitation progress.
1.2 Therapeutic Actions and Mechanism
Numerous groups have been working on arm rehabilitation robots, and several different types of rehabilitation robots have been developed and tested with stroke patients. In this article, we discuss different types of robotic arm therapy by analyzing several arm robots. This is not an exhaustive analysis of arm therapy robots, and the interested reader is referred to appropriate review articles [16–21].
The typical setup for robot-supported arm therapy consists of the seated stroke patient with the most affected arm connected to the robotic device (Fig. 27.1). In most applications, the patient looks at a graphical display—either a large, immersive 3D projection or a standard computer screen. The robotic device is characterized by its mechanical structure, the number and type of actuated joints, and the actuation principle. This section discusses these three key characteristics and their influence on rehabilitation training.

Typical setup for a robot-supported arm therapy system
1.2.1 Mechanical Structure: End-Effector-Based Robots and Exoskeleton Robots
End-effector-based robots are connected to the patient’s hand or forearm at a single point (Fig. 27.2). Depending on the number of links of the robot, the human arm can be positioned and/or oriented in space. The robot’s axes generally do not correspond with the human-joint rotation axes. That is why, from a mechanical point of view, these robots are easier to build and use.

Schematic view of end-effector-based (left) and exoskeleton (right) robots
Many researchers have developed and evaluated end-effector-based robots. The MIT Manus [22], the Mirror Image Motion Enabler [23], the Bi-Manu-Track [24], the GENTLE/s [25], and the Arm Coordination Training Robot [26] are examples of end-effector-based robotic devices. An important advantage of these robots is that they are easy to adjust to different arm lengths. A disadvantage is that, in general, the arm posture and/or the individual joint interaction torques are not fully determined by the robot because the patient and the robot interact just through one point—the robot’s end-effector.
The mechanical structure of the exoskeleton robot resembles the human arm anatomy, and the robot’s links correspond with human joints. Consequently, the human arm can be attached to the exoskeleton at several points. Adaptation to different body sizes is, therefore, more difficult than in end-effector-based systems because the length of each robot segment must be adjusted to the patient’s arm length. Since the human shoulder girdle is a complex joint, this is challenging and requires advanced mechanical solutions for the robot’s shoulder actuation [27]. However, with an exoskeleton robot, the arm posture is fully determined, and the applied torques to each joint of the human arm can be controlled separately. The ability to separately control the interacting torques in each joint is essential, such as when the subject’s elbow flexors are spastic. The mobilization of the elbow joint must not induce reaction torques and forces in the shoulder joint, which can be guaranteed by an exoskeleton robot, but not by an end-effector-based one. That is also why therapists use both hands to mobilize a spastic elbow joint. To avoid exercising forces to the shoulder, one hand holds the lower arm while the other hand holds the upper arm. This is comparable to an exoskeleton robot with a cuff affixed to the lower arm and another cuff affixed to the upper arm. Some examples of arm rehabilitation exoskeletons include the Dampace [28], the Armeo Spring (former T-Wrex) [29], the MGA-Exoskeleton [30], the L-Exos [31], the Caden-7 [32], the Intelligent Robotic Arm [33], as well as the ARMin I, II, and III devices [27, 34].
While it seems clear that end-effector-based robots have practical advantages (usability, simplicity, and cost-effectiveness) and exoskeleton robots have biomechanical advantages (better guidance), it remains an open research question whether and how this disparity influences therapeutic outcomes.
1.2.2 Number and Type of Actuated Joints
Apart from the mechanical structure, the number and type of actuated joints are another point of differentiation among robotic devices. Some groups focus on functional training that includes the entire arm and hand (proximal and distal joints). This functional training can be based on activities of daily living (ADL) and requires sophisticated and complex robotic devices such as the GENTLE/s, the Dampace, the Armeo Spring, or the ARMin robot. The reason for ADL training is that there is evidence that functional and task-oriented training shows good results in stroke patients [9, 35]. This confirms previous observations made with the constraint-induced movement therapy. Interventional studies have shown that forcing the affected limb to perform ADLs yields functional gains, allowing the stroke patient to increase the use of the affected arm in the “real-world” environment [36–39].
Other groups have developed robots that focus on the training of distal parts of the human arm such as the hand [40], the wrist, and the lower arm [41, 42]. One may speculate that the distal approach results in a more powerful activation of the sensorimotor cortex, given their larger cortical representation [43]. The suggested competition between proximal and distal arm segments for plastic brain territory after stroke [44] would imply shifting treatment emphasis from the shoulder to the forearm, hand, and fingers. Other devices work proximal to the elbow and shoulder [26, 45]. Namely, the Act3D robot implements an impairment-based, 3D robotic intervention that specifically targets abnormal joint torque coupling between the elbow and shoulder joint [45].
An interesting research question is whether robotic training should focus on whole-arm/hand functional movements, simply in a distal fashion or by combining distal and proximal modes. There is evidence from Krebs et al. [46] that training both the transport of the arm and manipulation of an object did not confer any advantage over solely training transport of the arm. This calls for further investigation with other robotic devices—especially with whole-arm exoskeletons.
1.2.3 Actuation Principle: Nonmotorized Robots and Motorized Robots
Most motorized rehabilitation robots are powered by electric motors. Depending on the underlying control paradigm, the motors can either control the interaction force/torque between the patient and the robot or the position of the robot. This allows the robotic device to support the human arm against gravity, canceling gravitational forces and making it easier for the patient to move his or her arm. Also, motorized robots can support the patient in the movement toward a target, such as an object within an ADL training scenario. If required, electric motors can also resist the patient in the movement, making the patient’s arm heavier or making the patient feel that he is carrying an object with a given mass. Motorized robots can be used as an evaluation tool to objectively measure voluntary force, range of motion, and level of spasticity [47–49]. Another important application is having the robot introduce force fields onto the endpoint of the human. The adaptation of human to different force fields is expected to trigger plasticity changes in the brain and enhance rehabilitation.
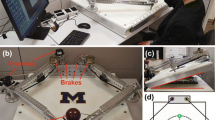
Some recent rehabilitation devices have been developed to work without motors [28, 29]. The commercially available Armeo Spring device is based on the former T-Wrex device [49] and works without any motors. In this exoskeleton device, springs support the human arm against gravity. The mechanical design allows the therapist to adjust the spring length and select the proper amount of support. Sensors measure the position and orientation of the human arm, which is transmitted to the graphical display where the patient can see his or her own movement on the computer screen. Compared to motorized robots, this approach has the great advantage of significantly lower costs and weight. Moreover, the device is easier to use and intrinsically safe. The disadvantage is that it is not possible to support the patient other than against gravity, so, for instance, the device cannot support the patient in directed reaching movements, nor can it challenge the patient by resisting movement. Some devices overcome this by adding brakes to the robot that dissipate energy and challenge the patient’s movements [28]. Current evidence suggests that nonmotorized devices might be very well suited for the training of mildly impaired stroke patients who do not need as much support as heavily impaired subjects [49].
2 Review of Experience and Evidence for the Application of the Armin Robot System
2.1 Technical Evaluation of the ARMin Robot System
The first version of the arm therapy robot, ARMin I, was designed and tested from 2003 to 2006 at the ETH Zurich in close collaboration with therapists and physicians from the University Hospital Balgrist, Zürich [34, 50, 51]. This version is characterized by 4 degrees of freedom (DOF) actuating the shoulder in 3D and flex/extend the elbow (Fig. 27.3). The upper arm is connected to the robot by an end-effector-based structure. Like later versions of the ARMin, the device could be operated in three modes: passive mobilization, active game-supported arm therapy, and active training of activities of daily living (ADL). The improved version, ARMin II, was characterized by a complete exoskeletal structure with two additional DOF (six altogether) allowing also pronation/supination of the lower arm and wrist flexion/extension (Fig. 27.1). Particular efforts were undertaken to optimize shoulder actuation: a sophisticated coupling mechanism enables the center of rotation of the shoulder to move in a vertical direction when the arm is lifted [52, 53]. This function is required to provide an anatomically correct shoulder movement that avoids shoulder stress from misalignment of the robot and anatomical joint axes when lifting the upper arm above face level.

ARMin I robot with a healthy test person (left). The person is looking at a computer monitor showing the movement task (right)
ARMin III (Fig. 27.4) was further improved with respect to mechanical robustness, complexity, user operation, and reliability [27]. Five ARMin III devices have been developed for a multicenter clinical trial. The next section describes the mechanics of the ARMin III robot in more detail.

ARMin III setup
2.2 Mechanical Setup of the ARMin III Robot
The ARMin III robot (Fig. 27.4) has an exoskeleton structure with six electric motors allowing it to move the human arm in all possible directions. Three motors actuate the shoulder joint for shoulder flexion/extension, horizontal abduction/adduction, and internal/external rotation. The elbow joint has two motors that actuate elbow flexion/extension and forearm pronation/supination. The last motor actuates wrist flexion/extension [27]. An optional module to support hand opening and closing can be attached to the ARMin III robot. All motors are equipped with two position sensors for redundant measurements. The motor and gears are carefully selected so that the friction is small and the backdrivability is good which is an important requirement for sensorless force-control [52] and impedance-control strategies.
The patient’s arm is affixed to the exoskeleton via two adjustable cuffs, one for the upper arm and one for the lower arm. To accommodate patients of varying body plans, the shoulder height can be adjusted via an electric lifting column, and the lengths of the upper and lower arms are adjustable. Laser pointers indicating the center of the glenohumeral joint help the therapist position the patient in the ARMin III device. The ARMin III robot can be configured to accommodate either the left or the right-arm. The transition between the two configurations does not require tools and takes less than 15 s.
A spring in the uppermost horizontal robotic link compensates for part of the weight of the exoskeleton. This lessens the load of the electric motor and has the desired effect of balancing the robotic arm when the power is off. Experience has shown that this is crucial for safety and for easy handling of the patient. The robotic shoulder actuation compensates for scapula motion during the arm-elevation movement, resulting in a comfortable and ergonomic shoulder motion [27].
2.3 Therapy Modes
The motorized ARMin robots work in three training modes: mobilization, game training, and ADL training. We found it was beneficial to start a typical 1-h training session with a slow and gentle mobilization exercise. Chronic stroke patients in particular seemed to profit from the passive mobilization that reduced spasms and “loosened” the arm and hand. After 10–15 min of passive mobilization, active training followed, including games, reaching exercises, and ADL training scenarios [54, 55].
2.3.1 Passive and Active Mobilization
In the mobilization-training mode, the robot moves the patient’s arm on a predefined trajectory. The robot is position-controlled, and the feedback loops help the motors compensate for any resistance that the patient produces. This means that, regardless of what the patient is doing, the robot will follow the predefined trajectory. If the patient moves together with the robot in the desired direction (active mobilization), the motors have less work than if the patient remains passive (passive mobilization). However, in both cases, the resulting movement will look the same. Since it is often desirable for the patient to actively contribute to the movement, the motor torque can be recorded and used as a performance measure to monitor how actively the patient contributes to the movement. In this case, the audiovisual display is used as a feedback modality to let the patient and therapist know how actively the patient is contributing to the movement [50]. Note that, from a technical point of view, this position-controlled training is based on industry-standard position control and is straightforward to implement.
The mobilization requires predefined trajectories that fit the patient’s needs in terms of velocity and range of motion. The therapist can either input the data via a computer graphical user interface (GUI) or—more conveniently—use a teach-and-repeat procedure that enables the robot to directly learn a desired trajectory from the therapist. To do this, the therapist moves the robotic arm together with the human arm in the desired way, and the robot records and stores the position data that enable the robot to repeat the movement as shown by the therapist.
2.3.2 Game Therapy
Computer games are a good way to motivate the patient to participate actively in the training and contribute as much as possible to a particular movement task. For example, in the ball game, a virtual ball is presented on a computer monitor. It rolls down on an inclined table (Fig. 27.5). The patient can catch the ball with a virtual handle that replicates the movement of the human hand. Thus, the patient “catches” the virtual ball by moving his or her hand to the appropriate position. An assist-as-much-as-needed control paradigm has been implemented to support the patient in this task: If the patient can catch the ball on his or her own, the robot does not deliver any support. If the patient cannot catch the ball, the robot supports the patient with an adjustable force that pushes or pulls the hand to the ball position and helps the patient to initiate and execute the appropriate movement.

Virtual reality scenarios for arm training. Ball game (a), labyrinth (b), and ping-pong game (c)
Whenever the robotic device supports the patient, the color of the handle changes from green to red, and an unpleasant sound is produced to alert both patient and therapist that the robot has supported the movement. The goal for the patient is to perform the task with as little support as possible. The therapist selects the supporting force, typically scaled so that the patient can successfully catch 80% of the balls. Several options enable the therapist to select the therapy mode that best fits the patient’s needs. For instance, the incline angle of the virtual table can be modified, resulting in faster or slower rolling. The size of the handle and the ball can be changed, and the behavior of the ball (multiple reflections with the wall and the handle) can be changed to challenge the patient further. For advanced patients, disturbing forces and force fields can be introduced by the robot to make the task harder and to challenge the patient even more. Also, the number and kind of joints, as well as the range of motion of the involved joints, can be adjusted to the patient’s needs.
A prerequisite for this assist-as-needed control strategy is that the intended movement of the patient (i.e., where the patient wants to move his or her hand) is known. For the ball game, this is the position where the ball falls.
A similar supporting strategy has been implemented for a ping-pong game (Fig. 27.5). Here, the patient holds a virtual ping-pong racket and plays a ping-pong match against a virtual opponent. At the highest level of difficulty, the patient must control the position, orientation, and impulse of the virtual racket to hit the incoming ball so that it lands on the computer-opponent’s side of the table. At easier levels, the robot takes care of the orientation and velocity of the racket, and the patient need only move the racket to a position where it will hit the incoming ball.
If required, the robot can also support the patient’s arm and provide a force that pulls the hand to the desired spot. To increase the patient’s motivation and engagement, a multiplayer application—where the patient plays virtual ping-pong against another patient instead of a virtual opponent—has been implemented and tested. This application allowed remote patients from different hospitals to meet virtually for a ping-pong game.
Another therapeutic computer game is the labyrinth game, where the patient navigates his or her hand through a virtual labyrinth. A red dot on the screen indicates the actual position of the human hand. The patient must move the red dot through the labyrinth. Virtual walls block the red dot and robot motors produce resistance that prevents the hand from passing through the walls. Force-feedback technology delivers a realistic impression of the virtual wall to the patient.
We found the labyrinth game particularly useful for patient therapy since the patient can use the walls for guidance. By following the walls, his or her movements remain free in three movement directions and are restricted only in the direction of the wall. This seemed to help patients move their hands in straight lines [55]. If required, the patient can be supported by the robot in completing the labyrinth task. In these instances, the labyrinth task is selected in the way that the patient must elevate his or her arm in the course of the exercise. This means that the starting point is at the bottom of the labyrinth and the goal is on top of the labyrinth. The therapist can choose from two supporting strategies. One compensates for the weight of the human arm, thus supporting the patient in lifting the arm. In the case of 100% weight support, the patient’s arm floats somewhat, and it is very easy for the patient to lift his or her arm. In the second supporting scheme, the robot allows upward arm movements but resists downward movements. With this strategy, the patient must lift his or her arm by him- or herself, but whenever he or she gets tired, he or she can rest, and the arm will stay at the current position without any effort. Both strategies can also be combined [56]. To increase patient motivation, scoring is used based on the time, intensity, number, and time of collisions with the wall as well as the number of objects (positioned along the course of the labyrinth) that are collected by the patient.
2.3.3 Training of Activities of Daily Living
The purpose of ADL training is to support the patient in relearning ADL tasks, make the training a better simulation of real-life tasks, and further motivate the patient. An ADL task is presented on the computer screen, and the patient tries to complete the task. As with game therapy, the robot supports the patient as much as needed and only interferes if necessary. Current research focuses on the implementation and evaluation of appropriate ADL tasks for robotic therapy. To date, implemented ADL tasks and used within ARMin therapy include:
-
Setting a table
-
Cooking potatoes
-
Filling a cup
-
Cleaning a table
-
Washing hands
-
Playing the piano
-
Manipulating an automatic ticketing machine.
For the kitchen scenario (Fig. 27.6), a virtual arm is presented on the computer screen. The arm reflects the movement of the patient’s arm, including shoulder, elbow, wrist, and hand opening and closing movements. A cooking stove, a kitchen table, and a shelf are fixed elements of the scenario. Cooking ingredients include several potatoes, black pepper, salt, and oregano. Available cooking tools include a pan and a dipper. Spoken instructions guide the patient through the cooking process. For instance, the patient must position the pan on the stove, turn on the heat, wait until the pan is hot, grasp the potatoes with his or her hand and put them into the pan, and wait until he or she hears the sound of roasting, add pepper and salt, and stir the pan.

Kitchen scenario
For this training scenario, the robot supports the patient only as much as needed, the patient has enough freedom to select his or her own movement trajectory, and the patient always sees feedback on how much he or she is currently supported by the robotic device. This is technically challenging because the cooking scenario involves several different movements [56, 57]. One possible solution that has been implemented with the ARMin system is to use virtual tunnels spanning from the start point to the goal point [58].
For instance, with the subtask of positioning potatoes in the pan, an invisible virtual tunnel starts at the initial location of the potatoes and ends above the pan. The robot lets the patient move freely within this tunnel. But once the patient hits the walls of the tunnels, the robot resists movement (similar to the labyrinth). Thus, the patient must follow the predefined path and not deviate from it. The diameter of the tunnel defines the amount of freedom the patient has. Furthermore, the patient is also free to select the timing and velocity of the movement. In addition, if required, the robot can also compensate for part of the arm weight and make the movement easier. Similar support strategies are implemented for the other ADL tasks [56].
2.4 Measurement Functionality of the ARMin Robot
The ability to objectively assess patient performance is one of the key benefits of robot-supported arm rehabilitation and allows the therapist to quantify therapy effects and patient progress. With the ARMin robot, the following parameters can be measured:
-
Active range of motion
-
Passive range of motion
-
Muscle strength
-
Abnormal joint synergies
-
Spatial precision of hand positioning.
The active and passive range of motion (ROM) is measured for each joint individually. When measuring, for example, the ROM of the elbow joint, all other joints are locked in a predefined position. The joint under investigation is controlled so that the patient can move it without resistance from the robot. The motor is only used to compensate for friction and gravity. The patient is instructed to extend the elbow as much as possible, and the robot measures the position of the elbow and stores the maximum values. When the passive range of motion is determined, the patient remains passive, and the joint is moved by the therapist while the robot records the maximum values of the joint position.
Muscle strength is measured with all joints locked in a predefined position. The motors are position-controlled with a fixed-reference position. Each joint is tested individually. For example, if the muscle strength of the abduction movement is tested, the patient is asked to abduct his or her arm as much as possible. Since the robot is position-controlled, and—in almost all cases—stronger than the human, the arm will not move. But the electric motor will need more current to work against the abduction torque. By measuring the motor current, the abduction torque can be determined using a model of the ARMin robot. The model describes the effects of gravity, friction, and the current-torque relationship in the electric motor.
Abnormal synergies result from abnormal muscle coactivation and loss of interjoint coordination. This means that, if a patient tries to abduct his or her arm, this goes together with an elbow flexion, forearm supination, and wrist and finger flexion [59]. To quantify abnormal synergies, all joints are locked in a predefined position. The patient abducts his or her arm as much as possible, and during the abduction torque, the joint torques produced by the patient in the shoulder, elbow, lower arm, and wrist are measured and recorded by the robotic device.
Moreover, a procedure to assess the resistance to the passive movement was developed. This measurement allows us to draw conclusions about the spasticity present in the affected arm. Here, the robot moves the human limb at different velocities and measures the required force. This technique has been implemented and evaluated for the lower limb within the Lokomat gait training robot [60].
The different ARMin assessments were evaluated in twenty-four healthy subjects and five patients with a spinal cord injury. The assessment was shown to be applicable and safe and that the measurements are widely reliable and comparable to clinical scales for arm motor function [61].
2.5 From ARMin for Adults to ChARMin for Children
As mentioned above an intensive, task-oriented rehabilitation training with active participation is crucial for the recovery of arm motor functions in adult stroke patients. These key features can be addressed using robotic support during arm training. That is why robots are increasingly used to complement rehabilitation training in stroke (e.g. ARMin III) and SCI patients (e.g. ARMin IV) or patients suffering from other neurological or motor impairments.
For children who suffer from cerebral palsy (CP) and other motor deficits, it is also known, that an intensive training [62] with active participation [63] is important to maintain and improve arm motor function. A small number of robots are available, that were tested with young patients (i.e., InMotion2 [64], NJIT-RAVR [65], REAPlan [66] and ArmeoSpring Pediatric [67]). The first results suggest that children profit from the intense training provided by the robot.
Based on the knowledge acquired with the adult arm robot ARMin and in close collaboration with the Rehabilitation Center for Children and Adolescents, Affoltern a. A., Switzerland, a new prototype—ChARMin—was developed for the use with children with neurological diagnoses including congenital or acquired brain lesions [68]. To the best of our knowledge, ChARMin is the first active robotic platform able to support single-joint and spatial movements and was built specifically for the needs of the pediatric target group.
Multiple aspects had to be changed in the new pediatric robot to achieve a design that covers the requirements of children. The robot needs to cover the target group of 5–18-years-old children and adolescents. The anthropometric ranges that need to be covered are too large to have it realized in a single system. Therefore, a modular design was chosen for ChARMin consisting of a proximal module that covers the entire range from 5 to 18-year-old children and a distal module that covers children aged 5–13 and 13–18 years. With this modular design and adjustable length settings for the shoulder height, the upper arm, the forearm and the hand length, the robot is applicable to all the children within the target group.

Change in FMA over 8 weeks of therapy and during follow-up for ARMin and control groups; error bars are SE
The kinematic shoulder structure of ARMin could not be transferred to the ChARMin concept as miniaturization would lead to robotic parts very close to the patient’s head. The new mechanical structure uses a parallel remote center of rotation mechanism (Fig. 27.7, proximal module) to actuate the horizontal shoulder rotation and another parallel structure for the shoulder internal/external rotation. This combination of serial and parallel kinematics provides the safety distance needed between the robot and the child. The two robotic concepts for ARMin and ChARMin are shown in Fig. 27.8.

Modular design of the ChARMin exoskeleton. The distal module is exchangeable according to the size of the child being trained. The robot is shown with a 13-year-old avatar. (Copyright IEEE, used with permission)
Similar to the adult ARMin version, the pediatric version has six DOF (three DOF for the shoulder and a single DOF for elbow, pro-/supination and wrist). Instead of an actuated hand module, ChARMin has an instrumented rubber bulb that detects the grip pressure, which can be used as an input for the software. The robot can be used for the right and left-arm sides and is mobile for transportation and positioning according to the patient. A passive gravity compensation mechanism and backdrivable joints allow for safe conditions even in the case of power loss.
An audiovisual interface with game-like scenarios is used to motivate the child to actively participate during the therapy session (Fig. 27.9).

a ARMin IV robot for rehabilitation of stroke and SCI patients compared with b the ChARMin robot for pediatric arm rehabilitation (same scale). (Copyright IEEE, used with permission)
While the passive mobilization and parts of the active game-supported arm therapy were transferred to the ChARMin robot, the ADL tasks were replaced with more child-friendly gaming scenarios. Different game scenarios were implemented that allow for a diversified training (Fig. 27.10). While some games are played with single joints (joint-based) others allow to perform multi-joint movements (end-effector based) in a workspace that is previously defined by the therapist (Fig. 27.11).

Visualization of a possible setup of ChARMin and the visual interface shown with a healthy subject

Various games are available for ChARMin that can be played on a joint- or end-effector level. a Airplane multi-joint, b diver multi-joint, c whack-a- mole single-joint and multi-joint, d tennis multi-joint, e ball single-joint, f spaceship multi-joint
Different support strategies are used to support the patient when needed. The support can be changed continuously from free non-supported movements to completely guided movements, where the patient can stay passive. Between these extreme conditions, the support can be changed to optimally support the patient such that he or she is challenged but not bored or over-challenged.
Moreover, the interface supports robot-assisted assessments. Five different assessment packages, which were previously evaluated in SCI patients with ARMin IV [61], can be used to assess the active and passive joint range of motion, the cubic workspace of the hand, the quality of point-to-point movements, the resistance to passive movements and the isometric joint torques for the six different joints.
A first ChARMin feasibility study is planned in the Rehabilitation Center for Children and Adolescents, Affoltern a. A., Switzerland, after receiving ethical approval. The study will investigate the applicability of the robot to children with cerebral palsy or other neurological diagnoses. Furthermore, the different support modes will be evaluated and the psychometric properties of the robot-assisted assessments determined.
2.6 Armeo Power®—Commercial Version of the ARMin Robot
The ARMin III robot also serves as a model for the prototype of the commercial version of the ARMin device, which is being developed and sold by Hocoma AG (Volketswil, Switzerland). The commercial version of the ARMin robot, named Armeo Power, was further optimized with respect to reliability, mechatronic robustness, user-friendliness, ergonomic function, and design, as well as optimized manufacturing processes and costs. The Armeo therapy concept presented by Hocoma consists of three Armeo products that are all driven from the same software platform. Each product is optimized for a specific phase of the rehabilitation process. Shortly after the injury, a patient with no or very little voluntary activation of arm muscles trains with the motorized robotic device Armeo Power (former ARMin III). Once his or her motor function improves and some active movements are possible, the patient continues arm training with the nonmotorized, weight-supported exoskeleton Armeo Spring (former T-Wrex) [29]. After further improvements, the patient might continue training with the Armeo Boom, which consists of an overhead sling suspension system. This training seems suitable for patients who can actively move the arm but still exhibit reduced workspace and poor motor control [69].
Further distribution of the commercialized products would allow selling companies such as Hocoma AG to increase the body of clinical data of specific rehabilitation robots since a large number of rehabilitation facilities would use the same device for clinical practice and for research (Fig. 27.12).

The Armeo Product line, with the commercial ARMin device Armeo®Power (a), Armeo®Spring (b), and Armeo®Boom (c). (Copyright Hocoma AG, Switzerland, www.hocoma.com; used with version of the permission)
2.7 Evaluation of the ARMin Technology
Three different versions of the ARMin device (I–III) were used to evaluate the ARMin technology. Evaluation of the ARMin technology was carried out with different versions of the ARMin.
2.7.1 Technical Tests with Healthy Subjects
Before the robotic device can be used with test subjects, it must be tested without a person in it. The appropriate test procedure verifies device safety and tests all situations defined as critical in the risk-management document. After testing, the technical specifications of the robot were validated by measurement. Table 27.1 shows the measured technical data for the ARMin III robot [27].
The next step was to evaluate the robot with healthy subjects. After appropriate approval by an independent ethics committee (internal review board), a thorough technical evaluation was performed on healthy subjects before the robot was used with patients. After providing written informed consent, the test subjects were exposed to the robotic device. The purposes of this evaluation included:
-
Testing the handling of the robotic device. This includes positioning the test subject, adapting the robotic device for different body plans, changing from left-arm use to right-arm use, and comfort evaluation.
-
Functional testing of the software. The questions were whether the test subject understood the instructions, whether he or she could successfully perform the exercises, and whether he or she liked the exercises. Special attention was also given to unwanted side effects, i.e., motion sickness and others.
Questionnaires validated the comfort and subjective feelings of the test subjects. One important side effect of this technical testing was that the therapist learned how to manipulate and use the robotic device before being exposed to patients.
2.7.2 Technical Tests with Stroke Patients
After the tests with healthy subjects concluded, technical tests with stroke patients were performed. After written informed consent was obtained, chronic stroke patients tested the device in one to five therapy sessions. The purpose of these tests was not to measure possible improvements in the patient’s health status but to evaluate the technical ergonomic functionality of the ARMin robot. Specific goals included:
-
Testing the handling of the ARMin device with stroke patients. Assessing the subjective feelings regarding comfort and ergonomics. Evaluating all training modes, including passive and active mobilization, game-supported therapy, and ADL training.
-
Testing the level of difficulty of the tasks and the level of assistance that the robot provides to support the patients.
-
Assessing patient motivation.
More than 20 stroke subjects participated in these preliminary tests [34].
2.7.3 Clinical Pilot Studies with Stroke Patients
A pilot study with three chronic stroke subjects (at least 14 months post-stroke) was performed with the ARMin I robot to investigate whether arm training with the ARMin I improves motor function of the paretic upper extremity [55]. The study had an A–B design with 2 weeks of multiple baseline measurements (A) and 8 weeks of training (B) with repetitive measurement and follow-up measurements 8 weeks after training. The training included shoulder and elbow movements induced by ARMin I. Two subjects had three 1-h sessions per week, and one subject received five 1-h sessions per week. The main outcome measurement was the upper limb motor portion of the Fugl-Meyer Assessment (FMA). It showed moderate, but significant improvements in all three subjects (p < 0.05): Starting with 14, 26 and 15 out of a maximum score of 66 points, the gains were 3.1, 3.0, and 4.2 points, respectively. Most improvements were maintained 8 weeks after discharge. However, patients stated that the daily use of their paretic arm in the real-world did not change. This finding was supported by constant ARAT and Barthel Index scores. This could be explained by the fact that, due to limitations of the ARMin I device, primarily non-ADL-related proximal joint movements were trained.
Therefore, another study was performed to investigate the effects of intensive arm training on motor performance using the ARMin II robot, where distal joints and ADL tasks were also incorporated into the training [54]. The study was conducted with four chronic stroke subjects (at least 12 months post-stroke). The subjects received robot-assisted therapy over a period of 8 weeks, 3–4 days per week, 1-h per day. Two patients had four 1-h training sessions per week, and the other two patients had three 1-h training sessions per week.
The primary outcome measurement was again the upper extremity portion of the FMA. The secondary outcome measures were the Wolf Motor Function Test (WMFT), maximum voluntary joint torques, and additional scores to assess transfer effects. Three out of four patients showed significant improvements (p < 0.05) in the primary outcome. Starting with 21, 24, 11, and 10 out of a maximum score of 66 points, the gains at the end of therapy were 17.6, 3.1, 6.8, and 2.1, and at six month follow-up 29, 5, 8, and 3 points, respectively. Improvements in FMA scores aligned with the torque measurements.
Most improvements were maintained, and some even further increased, between discharge and a 6-month follow-up. The data clearly indicate that intensive arm therapy with the robot ARMin II can significantly improve motor function of the paretic arm in some stroke patients. Even those who are in a chronic state achieve sustainable improvements. Care must be taken in analyzing the results of this pilot study. Participants were selected outpatients, there was no control group, and there were only four participants. Thus, one cannot generalize these results. However, the result justified the start of a subsequent controlled, randomized, multicenter clinical trial.
2.7.4 Clinical Trials with Stroke Patients
In order to investigate the effectiveness of arm treatment with ARMin, a clinical study with subjects in the chronic phase post-stroke was performed [70]. It was the first large-scale clinical study to offer neurorehabilitative therapy of the arm with an exoskeleton robot. A key aspect was to investigate the effects of ADL training based on reaching and grasping movements. ARMin III provides the required functions: audiovisual ADL tasks, large movement ranges in the three-dimensional space, actuation of proximal and distal joints including hand opening and closing, and a patient-responsive control.
Four hospitals participated in the trial. Seventy-seven patients in the chronic phase (i.e., more than six months) post-stroke with moderate to severe impairment of an arm (as tested with FMA: 8–38/max 66 points) were randomly assigned to either ARMin training or conventional, physical or occupational therapy. During therapy with ARMin, each of three therapy modes (mobilization, games, and ADL training) had to be performed for at least ten minutes. Conventional therapy resembled the regular therapy given in outpatient clinics. Both groups were trained for eight weeks, three times per week, with one hour for each training session (total of 24 sessions). Outcome measures were obtained at five time points: prior to, during (after four weeks), directly after and two and six months after the training phase. The primary outcome measure was the FMA, a well-established clinical test that measures impairment of the arm. Further outcome measures were performed to evaluate task-oriented function (by means of the Wolf Motor Function Test and the Motor Activity Log). Furthermore, participation in life was assessed (with the Stroke Impact Scale). With ARMin, isometric strength in the arm (i.e., of shoulder abduction, adduction, anteversion, and retroversion, and of elbow flexion and extension) was measured.
Results confirmed the hypothesis: after eight weeks of training, ARMin therapy was not only as successful as conventional therapy but the improvements in motor function significantly exceeded those of conventional therapy (FMA, mean difference: 0.78 points, 95% CI 0.03–1.53) (Fig. 27.7). Especially the most severely affected profited from robotic therapy (mean difference 1.91 points, 95% CI 1.00–2·82). Of note, the robotic group gained significantly less strength than the conventional group. We speculate that the variables for the path assistance chosen during ARMin therapy might have been too supportive, tempting patients to diminish their own effort and therefore restricting strength training. A future focus for chronic patients would be to integrate specific strength training tasks in the robot. The other tests showed no significant difference between the two groups.
The higher motor functional gains in the ARMin group were still too small to be clinically meaningful for the single subject, but promising taking into consideration that the patients were in the chronic phase when a plateau of recovery is approached and gains in most cases are only limited.
Palermo and colleagues [71] tested the translational effects of robotic therapy in subacute stroke patients using the Armeo Power robot in addition to conventional rehabilitation therapy. In the study, ten subacute stroke survivors underwent a robotic training program of 20 sessions, each lasting 50 min, five sessions per week in addition to usual conventional rehabilitation therapies. Besides clinical scales, a sophisticated kinematic assessment of the upper limb, both pre-and post-treatment, was performed. The authors report remarkable differences in most parameters and significant correlations between the kinematic parameters and clinical scales. The data, although from a rather small sample, suggests that 3D robot-mediated rehabilitation, in addition to conventional therapy, could represent an effective method for the recovery of upper limb disability and that kinematic assessment may represent a valid tool for objectively evaluating treatment efficacy.
Calabro et al. [72] conducted a very interesting study with 35 patients with a first-ever ischemic supratentorial stroke at least two months before enrollment and unilateral hemiplegia. The study was designed to identify potential neurophysiologic markers to predict the responsiveness of stroke patients to upper limb robotic treatment. All patients underwent 40 Armeo Power training sessions that lasted one hour each (five times a week, for eight weeks). Spasticity and motor function of the upper limbs were assessed by means of the Modified Ashworth scale and the Fugl-Meyer assessment, respectively. The cortical excitability of the bilateral primary motor areas was assessed in response to the repetitive paired associative stimulation paradigm using transcranial magnetic stimulation. The results showed that patients with significant repetitive paired associative stimulation after-effects at baseline exhibited an evident increase in cortical plasticity in the affected hemisphere, and a decrease in interhemispheric inhibition. These findings were paralleled by clinical improvements (Fugl-Meyer assessment) and Armeo Power kinematic improvement, suggesting that the use of Armeo power may improve upper limb motor function recovery as predicted by baseline cortical excitability. The same team [73] conducted a pilot randomized controlled trial to investigate whether robotic rehabilitation combined with muscle vibration improves upper limb spasticity and function. Twenty patients suffering from unilateral post-stroke upper limb spasticity were included and they received 40 daily sessions of Armeo Power training (1-h/session, 5 sessions/week, for 8 weeks) with or without muscle vibration. The group with muscle vibration showed a greater reduction of spasticity measured with the modified Ashworth Scale and greater functional outcome measured with the Fugl-Meyer Assessment of the Upper Extremity. The authors write that this combined rehabilitative approach could be a promising option for improving upper limb spasticity and motor function.
The updated Cochrane Review on upper limb rehabilitation robotics [74] includes 45 trials involving 1619 participants and 24 different devices. The quality of the evidence was rated as high and the authors conclude that “robot-assisted arm training improved activities of daily living in people after stroke, and function and muscle strength of the affected arm. As adverse events, such as injuries and pain, were seldom described, these devices can be applied as a rehabilitation tool, but we still do not know when or how often they should be used”. Studies with the following devices account for the largest numbers of patients for the review: 25% MIT Manus/InMotion2 [75], 14% Bi-manu-track [76], 7% Hand Master [77], 7% MIME [78], 6% T-Wrex/ArmeoSpring [49], 6% ARMin/Armeo Power, 5% ReoGo [79] and 4% Amadeus [80].
2.7.5 Clinical Trials with Spinal Cord Injured Patients
A pilot randomized controlled trial to evaluate the clinical efficacy of upper limb robotic therapy in people with tetraplegia with the Armeo power was conducted in an inpatient hospital in Seoul, Korea [61]. Participants were randomly allocated to a robotic therapy or an occupational therapy group, both groups receiving usual care plus 30 min additional therapy per day for four weeks. Primary outcomes were the Medical Research Council scale of each key muscle and Upper Extremity Motor Score (UEMS) for the trained arm. A total of 34 individuals with tetraplegia were included (17 in each group). At four weeks, the median change in the UEMS in the robotic group was 1/25 (0–3) points compared with 0/24 (−1 to 1) points in the occupational therapy group. The differences were not statistically significant, and the authors conclude that further studies are required for a better understanding of the effects of robotic therapy on people with tetraplegia.
In a concept study [81], 24 healthy subjects and five patients after spinal cord injury underwent robot-based assessments using the ARMin robot. Five different tasks were performed with aid of a visual display. Ten kinematic, kinetic, and timing assessment parameters were extracted on both joint- and end-effector levels including active and passive range of motion, cubic reaching volume, movement time, distance-path ratio, precision, smoothness, reaction time, joint toques, and joint stiffness. A subsequent comparison with clinical scores revealed good correlations between robot-based joint torques and the Manual Muscle Test. Reaction time and distance-path ratio showed a good correlation with the “Graded and redefined assessment of Strength, Sensibility and Prehension” (GRASP) and the Van Lieshout Test (VLT) for movements towards a predefined target in the center of the frontal plane. The authors conclude that these preliminary results suggest that the measurements are widely reliable and comparable to clinical scales for arm motor function.
2.7.6 Perspectives for Future Clinical Testing
We believe that objective device-based measurements are a relevant part of standardized clinical outcomes and should be integrated into clinical evaluation studies. Future studies on patients should be performed in the first days to weeks after stroke, when the potential for real recovery, rather than compensation, is highest. Here, an exoskeleton robot should be the ideal tool as it enables to train purposeful movements with control of the whole arm from the shoulder to the hand. It is, thus, capable of guiding the arm in an almost physiological manner during task training. Different learning strategies that have been proven to be successful can be implemented in the software. Through the measurement functionality of ARMin, the VR tasks can be adapted continuously to the subjects’ abilities to achieve a patient-tailored, intensified therapy.
3 Current Developments and Ongoing Testing
3.1 Technical Developments for Improving the Human-Robot Interaction
A common problem in actuated arm exoskeletons, namely in the ARMin robot and the Armeo Power robot, is that the serial kinematic structure results in a system that suffers from high inertia and friction altering the effective haptic rendering properties of the virtual training environment [82]. This can result in increased patient fatigue, limiting the potential use of active training paradigms. Indeed, a transparent robot is needed to support patients to perform motor tasks. One possibility to solve this problem is presented by Özen and colleagues [83]. They propose to equip the exoskeleton with force sensors measuring the interaction force between the robot and the human arm (Fig. 27.13). The authors demonstrate that high control loop rates and advanced motion control techniques in combination with disturbance observers allowed to achieve high transparency even for fast movements. Because of the force sensors, this could be achieved without the need for precise modeling of the robot.

Improved haptic rendering performance thanks to additional force sensors measuring the interaction force between the user’s am and the robotic device. The picture shows an inverted pendulum task using the ARMin exoskeleton as a visuo-haptic interface (Copyright IEEE, with permission).
In a perfectly transparent robot, the patient would have to carry the weight of his own arm. This is not possible for extended training duration and arm weight compensation needs to be implemented. In a recent study, Just et al. [84] introduce new methods for human arm weight compensation. Arm weight compensation is an important requirement for stroke rehabilitation because it allows to increase the active range of motion and to reduce the effects of pathological muscle synergies. As the authors emphasize, it is, however, hard to effectively assess and compare human arm weight relief because of the differences in structure, performance, and control algorithms among the existing robotic platforms. They introduce criteria for ideal am weight compensation, and they propose and analyze three distinct arm weight compensation methods. They could show that all methods reduce EMG activity by at least 49%.
Both the optimized transparency methods and the improved weight compensation are important elements to further improve the human-robot interaction and the therapeutic modes of motorized arm exoskeletons. The disadvantage of these approaches is that they require rather expensive six degree of freedom force sensors and it is unclear if the industry is willing to upgrade the motorized exoskeletons with this feature.
In a validation study with 40 healthy participants [85] it was shown that the improved haptic rendering significantly increased participant’s movement variability during the training and the ability to synchronize with the task. Furthermore, the weight support enhanced the participant’s movement variability during the training and reduces the participant’s physical effort. The haptic rendering enhanced motor learning and skill transfer. On the other side, the authors found, contrary to the expectations, that the weight support hampers motor learning compared to training without weight support. A possible explanation could be that the weight support disrupts motor learning because participants rely on the assistance during the training and fail to learn the motor commands required to perform the desired task. It becomes evident that further work is needed to better understand the interactions between robotic assistance, haptic rendering and the effects on motor learning, especially in brain-injured patients.
3.2 When Music Meets Robotics—An Innovative Approach to Increase Training Motivation
In a study with sixteen healthy subjects, Baur et al. [86] developed an audio-haptic task where participants could generate sounds by moving their arms. As music is known to improve motivation in neurorehabilitation training, the authors aimed at integrating music creation into robotic assisted motor therapy. The task was designed so that it could be performed either with or without a graphical display as an audio-haptic environment only. The game environment was developed to target horizontal movements at table height as this type of arm motion is required for activities of daily living, such as cleaning a table or moving objects on a table. The arm of the participants was supported by means of a virtual table-top allowing participants to move the arm within a horizontal plane. The horizontal left-right movement served as game input allowing participants to move into different sound zones consisting of fourteen different pairs of sound samples and two pairs of sound effects. The sound samples consisted of synthetic piano, mallets, marimba, vibraphone, pads, hi-hats, and claps. After the training, participants were invited to collect and keep the produced sound files for future listening. While the study did not show statistically significant motivational differences between the tested conditions, the authors conclude that the combination of music and activities promoting creativity in motor training promotes enjoyment, and thus, intrinsic motivation of subjects performing robot-assisted training. They found that the audio-haptic environment is sufficient to create a meaningful gameplay and that music tasks can be performed without a visual display. The study demonstrated the feasibility of playing an audio-haptic music game and the authors suggest a follow-up study on stroke survivors.
3.3 Multiplayer Games—How to Increase Training Motivation
Multiplayer environments increase training intensity in robot-assisted therapy after stroke [87]. Compared to single-player modes they improve the game experience and game performance. Baur et al. [88] tested two multiplayer games with the ARMin robot. The Air Hockey game is a competitive game in which the different abilities of the players were compensated by individual haptic guidance or damping forces. Forty patients in the subacute phase post-stroke played the game in single-player and multiplayer modes. Sixteen of them preferred the multiplayer mode. The competitive form was more motivating and increased exercise intensity more than the cooperative mode. In the Haptic Kitchen game, a healthy person (e.g. therapist or spouse) could assist the patient's movements in the ARMin with a virtual force field applied by moving an HTC Vive hand controller©. Both the force field and the location of the application were visualized. In a single caste study with two patients post-stroke and their spouses, patients showed a tendency to be more motivated in the multiplayer mode as compared to the single-player mode.
3.4 A Novel Neuro-Animation Experience to Facilitate High-Dosage and High-Intensity Training
Krakauer and colleagues [89] implemented a custom-designed immersive animation-based audiovisual scenario named “I am Dolphin” (KATA John Hopkins University). In this setting, the patient’s paretic arm was unweighted using the Armeo Power exoskeleton device. This allowed the practice of multi-joint 3D arm movements despite weakness without requiring a therapist to activity lift the paretic arm. The 3D movements of the paretic arm controlled the movement of a virtual dolphin, swimming through different ocean scenes with various task goals including chasing and eating fish, eluding attacks, and performing jumps. The tasks were designed to promote movement in all planes throughout the active ranges of motion, and titrated based on successful completion of progressive levels of difficulties. A total of 24 patients (within 6 weeks post-stroke) were randomized to the experimental group (Dolphin scenario) and to conventional occupational therapy and underwent 30 sessions of 60 min in addition to standard care. Both groups were also matched to a historical cohort, which received only 30 min of upper limb therapy per day. There were no significant between-group differences in Fugl-Meyer Upper Extremity motor score (primary outcome), Action Research Arm Test (ARAT) or other secondary outcomes at any timepoint. Both high-dose groups showed greater recovery on the ARAT, but not on the Fugl-Meyer score when compared with the historical cohort. The authors conclude that neuro-animation may offer an enjoyable and scalable way to deliver high-dose and intensive upper limb therapy.
4 Conclusions
Current studies, including the updated Cochrane Review on upper limb rehabilitation robotics [74], indicate that stroke and spinal cord injury patients benefit from robot-assisted upper limb training. The functional gains of robotic training are in the same range as those of manual therapy. This contrasts with the training of the lower extremities, where robotic therapy is more efficient than conventional training (Cochrane). Several points could contribute to this finding: (a) Post-stroke recovery of ambulatory function is generally better than the recovery of arm/hand function [73]. (b) Conventional upper limb training might better reflect daily activities with all its facets (bimanual, manipulations of real objects) than robotic training with VR simulated activities. In other words, robot-supported gait training more closely matches real-life activity than robot-supported arm/hand therapy. (c) The technological level of clinically available upper limb rehabilitation robots does not fully explore the technological potential (e.g. training strategies; hand actuation; (bimanual) object manipulation) of upper limb robotics. (d) Clinical findings pertaining to the upper extremity include a larger number of different devices which complicates a coherent analysis of findings across these studies.
Based on current findings, we can neither advocate nor condemn the clinical use of upper limb rehabilitation robots. There are, however, some indications that severely affected patients might indeed benefit most from robot-supported upper limb training [70]. An interesting possibility is to establish so called “robot studios” where a therapist supervises several patients working with different devices as an add-on to existing conventional therapy [90].
Current and future research to better understand the mechanisms of action, as well as which patients benefit most from robotic therapy, is extremely important to clarify future clinical use. Clinical research must go hand in hand with research into technological aspects. This includes the question about the patient-specific optimal audiovisual input, optimal training and support strategies, and improved control strategies.
References
Brainin M, Bornstein N, Boysen G, Demarin V. Acute neurological stroke care in Europe: results of the European stroke care inventory. Eur J Neurol. 2000;7:5–10.
Thorvaldsen P, Asplund K, Kuulasmaa K, Rajakangas AM, Schroll M. Stroke incidence, case fatality, and mortality in the WHO MONICA project. World health organization monitoring trends and determinants in cardiovascular disease. Stroke. 1995;26(3):361–7.
Rosamond W, Flegal K, Friday G, et al. Heart disease and stroke statistics update. A report from the American Heart Association Statistics Committee and Stroke Statistics Subcommittee. Circulation. 2007;115:69–171.
Maeurer HC, Diener HC. Der Schlaganfall. Stuttgart: Georg Thieme Verlag; 1996.
Rossini PM, Calautti C, Pauri F, Baron JC. Post-stroke plastic reorganisation in the adult brain. Lancet Neurol. 2003;2:493–502.
Nakayama H, Jrgensen HS, Raaschou HO, Olsen TS. Recovery of upper extremity function in stroke patients: the Copenhagen stroke study. Arch Phys Med Rehabil. 1994;75:394–8.
Barreca S, Wolf SL, Fasoli S, Bohannon R. Treatment interventions for the paretic upper limb of stroke survivors: a critical review. Neurorehabil Neural Repair. 2003;17(4):220–6.
Platz T. Evidence-based arm rehabilitation—a systematic review of the literature. Nervenarzt. 2003;74(10):841–9.
Dobkin BH. Strategies for stroke rehabilitation. Lancet Neurol. 2004;3(9):528–36.
Ottenbacher KJ, Jannell S. The results of clinical trials in stroke rehabilitation research. Arch Neurol. 1993;50:37–44.
Kwakkel G, Wagenaar RC, Koelman TW, Lankhorst GJ, Koetsier JC. Effects of intensity of rehabilitation after stroke. A research synthesis. Stroke. 1997;28(8):1550–6.
Nelles G. Cortical reorganization-effects of intensive therapy. Arch Phys Med Rehabil. 2004;22:239–44.
Sunderland A, Tinson DJ, Bradley EL, Fletcher D, Langton Hewer R, Wade DT. Enhanced physical therapy improves recovery of arm function after stroke. A randomised controlled trial. J Neurol Neurosurg Psychiatry. 1992;55(7):530–5.
Kwakkel G, Kollen BJ, Wagenaar RC. Long term effects of intensity of upper and lower limb training after stroke: a randomised trial. J Neurol Neurosurg Psychiatry. 2002;72:473–9.
Butefisch C, Hummelsheim H, Denzler P, Mauritz KH. Repetitive training of isolated movements improves the outcome of motor rehabilitation of the centrally paretic hand. J Neurol Sci. 1995;130:59–68.
Prange GB, Jannink MJA, Groothuis-Oudshoorn CGM, Hermens HJ, MJ Ijzerman. Systematic review of the effect of robot-aided therapy on recovery of the hemiparetic arm after stroke. J Rehabil Res Dev. 2006;43:171–84.
Riener R, Nef T, Colombo G. Robot-aided neurorehabilitation for the upper extremities. Med Biol Eng Comput. 2005;43:2–10.
Kwakkel G, Kollen BJ, Krebs HI. Effects of robotassisted therapy on upper limb recovery after stroke: a systematic review. Neurorehabil Neural Repair. 2008;22(2):111–21.
Singh H, Unger J, Zariffa J, Pakosh M, Jaglal S, Craven BC, Musselman KE. Robot-assisted upper extremity rehabilitation for cervical spinal cord injuries: a systematic scoping review. Disabil Rehabil Assist Technol. 2018;13(7):704–15. https://doi.org/10.1080/17483107.2018.1425747 Epub 2018 Jan 15 PMID: 29334467.
Monardo G, Pavese C, Giorgi I, Godi M, Colombo R. Evaluation of patient motivation and satisfaction during technology-assisted rehabilitation: an experiential review. Games Health J. 2021;10(1):13–27. https://doi.org/10.1089/g4h.2020.0024 Epub 2020 Jul 2 PMID: 32614618.
Palermo E, Hayes DR, Russo EF, Calabrò RS, Pacilli A, Filoni S. Translational effects of robot-mediated therapy in subacute stroke patients: an experimental evaluation of upper limb motor recovery. PeerJ. 2018;4(6): e5544. https://doi.org/10.7717/peerj.5544.PMID:30202655;PMCID:PMC6128258.
Krebs HI, Ferraro M, Buerger SP, et al. Rehabilitation robotics: pilot trial of a spatial extension for MIT-Manus. J Neuroeng Rehabil. 2004;1:5–9.
Lum PS, Burgar CG, Shor PC, Majmundar M, Van der Loos M. Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke. Arch Phys Med Rehabil. 2002;83(7):952–9.
Hesse S, Werner C, Pohl M, Mehrholz J, Puzich U, Krebs HI. Mechanical arm trainer for the treatment of the severely affected arm after a stroke: a single-blinded randomized trial in two centers. Am J Phys Med Rehabil. 2008;87(10):779–88.
Coote S, Murphy B, Harwin W, Stokes E. The effect of the GENTLE/s robot-mediated therapy system on arm function after stroke. Clin Rehabil. 2008;22(5):395–405.
Dewald J, Ellis MD, Holubar BG, Sukal T, Acosta AM. The robot application in the rehabilitation of stroke patients. Neurol Rehabil. 2004;4:S7.
Nef T, Guidali M, Riener R. ARMin III—arm therapy exoskeleton with an ergonomic shoulder actuation. Appl Bionics Biomech. 2009;6(2):127–42.
Stienen AHA, Hekman EEG, Van der Helm FCT, et al. Dampace: dynamic force-coordination trainer for the upper extremities. Proc IEEE. 2007;10:13–5.
Sanchez RJ, Liu J, Rao S, et al. Automating arm movement training following severe stroke: functional exercise with quantitative feedback in a gravityreduced environment. IEEE Trans Neural Syst Rehabil Eng. 2006;14:378–89.
Roderick S, Liszka M, Carignan C.Design of an arm exoskeleton with scapula motion for shoulder rehabilitation ICAR ‘05. In: Proceedings of the 12th international conference on advanced robotics; 2005. p. 524–31. https://doi.org/10.1109/ICAR.2005.1507459.
Frisoli A, Borelli L, Montagner A, et al. Arm rehabilitation with a robotic exoskeleleton in virtual reality. In: IEEE 10th international conference on rehabilitation robotics, vol. 1. and 2. Noordwijk; 2007. p. 631–42.
Rosen J, Perry JC, Manning N, Burns S, Hannaford B.The human arm kinematics and dynamics during daily activities - toward a 7 DOF upper limb powered exoskeleton ICAR ‘05. In: Proceedings of the 12th international conference on advanced robotics; 2005. p. 532–9. https://doi.org/10.1109/ICAR.2005.1507460.
Zhang LQ, Park FS, Ren YP. Developing an intelligent robotic arm for stroke rehabilitation. In: 2007 IEEE 10th international conference on rehabilitation robotics, vol. 1 and 2. Noordwijk; 2007, p. 984–93.
Nef T, Mihelj M, Riener R. ARMin: a robot for patient-cooperative arm therapy. Med Biol Eng Comput. 2007;45:887–900.
Bayona NA, Bitensky J, Salter K, Teasell R. The role of task-specific training in rehabilitation therapies. Top Stroke Rehabil. 2005;12:58–65.
Wolf SL, Lecraw DE, Barton LA, Jann BB. Forced use of hemiplegic upper extremity to reverse the effect of learned nonuse among chronic stroke and head-injured patients. Exp Neurol. 1989;104:125–32.
Taub E, Uswatte G, Pidikiti R. Constraint-induced movement therapy: a new family of techniques with broad application to physical rehabilitation—a clinical review. J Rehabil Res Dev. 1999;36:237–51.
Miltner WHR, Bauder H, Sommer M, Dettmers C, Taub E. Effects of constraint-induced movement therapy on patients with chronic motor deficits after stroke. A replication. Stroke. 1999;30:586–92.
Dromerick AW, Edwards DF, Hahn M. Does the application of constraint-induced movement therapy during acute rehabilitation reduce arm impairment after ischemic stroke? Stroke. 2000;31:2984–8.
Lambercy O, Dovat L, Gassert R, Burdet E, Teo CL, Milner T. A haptic knob for rehabilitation of hand function. IEEE Trans Neural Syst Rehabil Eng. 2007;15(3):356–66.
Hesse S, Schulte-Tigges G, Konrad M, Bardeleben A, Werner C. Robot-assisted arm trainer for the passive and active practice of bilateral forearm and wrist movements in hemiparetic subjects. Arch Phys Med Rehabil. 2003;84:915–20.
Krebs HI, Volpe BT, Williams D, et al. Robot-aided neurorehabilitation: a robot for wrist rehabilitation. IEEE Trans Neural Syst Rehabil Eng. 2007;15(3):327–35.
Hesse S, Werner C, Pohl M, Rueckriem S, Mehrholz J, Lingnau ML. Computerized arm training improves the motor control of the severely affected arm after stroke: a single-blinded randomized trial in two centers. Stroke. 2005;36(9):1960–6.
Muellbacher W, Richards C, Ziemann U, et al. Improving hand function in chronic stroke. Arch Neurol. 2002;59(8):1278–82. 42. Krebs HI, Hogan N, Aisen ML, Volpe BT. Robot-aided neurorehabilitation. IEEE Trans Rehabil Eng. 1998;6:75–87.
Ellis MD, Sukal-Moulton TM, Dewald JP. Impairment-based 3-D robotic intervention improves upper extremity work area in chronic stroke: targeting abnormal joint torque coupling with progressive shoulder abduction loading. IEEE Trans Robot. 2009;25(3):549–55.
Krebs HI, Mernoff S, Fasoli SE, Hughes R, Stein J, Hogan N. A comparison of functional and impairment-based robotic training in severe to moderate chronic stroke: a pilot study. NeuroRehabilitation. 2008;23(1):81–7. PMID: 18356591; PMCID: PMC4692808.
Bolliger M, Banz R, Dietz V, Lunenburger L. Standardized voluntary force measurement in a lower extremity rehabilitation robot. J Neuroeng Rehabil. 2008;5:23.
Lunenburger L, Colombo G, Riener R. Biofeedback for robotic gait rehabilitation. J Neuroeng Rehabil. 2007;4:1.
Housman SJ, Scott KM, Reinkensmeyer DJ. A randomized controlled trial of gravity-supported, computer-enhanced arm exercise for individuals with severe hemiparesis. Neurorehabil Neural Repair. 2009;23(5):505–14.
Nef T, Mihelj M, Colombo G, Riener R. ARMin robot for rehabilitation of the upper extremities. In: IEEE international conference on robotics and automation, Orlando; 2006. p. 3152–7.
Mihelj M, Nef T, Riener R. ARMin II—7 DoF rehabilitation robot: mechanics and kinematics. In: Proceedings of the 2007 IEEE international conference on robotics and automation, vol. 1–10, Rome; 2007. p. 4120–5.
Nef T, Lum P. Improving backdrivability in geared rehabilitation robots. Med Biol Eng Comput. 2009;47(4):441–7.
Staubli P, Nef T, Klamroth-Marganska V, Riener R. Effects of intensive arm training with the rehabilitation robot ARMin II in chronic stroke patients: four single-cases. J Neuroeng Rehabil. 2009;6:46.
Nef T, Quinter G, Muller R, Riener R. Effects of arm training with the robotic device ARMin I in chronic stroke: three single cases. Neurodegener Dis. 2009;6(5–6):240–51.
Nef T, Mihelj M, Kiefer G, Perndl C, Mueller R, Riener R. ARMin—exoskeleton for arm therapy in stroke patients. In: 2007 IEEE 10th international conference on rehabilitation robotics, vol. 1 and 2, Noordwijk; 2007. p. 68–74.
Guidali M, Duschau-Wicke A, Broggi S, Klamroth-Marganska V, Nef T, Riener R. Med Biol Eng Comput. 2011;49(10):1213–23 Epub 2011 Jul28 PMID:21796422.
Mihelj M, Nef T, Riener R. A novel paradigm for patient-cooperative control of upper-limb rehabilitation robots. Adv Robot. 2007;21(8):843–67.
Duschau-Wicke A, von Zitzewitz J, Caprez A, Lunenburger L, Riener R. Path control: a method for patient-cooperative robot-aided gait rehabilitation. IEEE Trans Neural Syst Rehabil Eng. 2010;18(1):38–48.
Dewald JP, Beer RF. Abnormal joint torque patterns in the paretic upper limb of subjects with hemiparesis. Muscle Nerve. 2001;24:273–83.
Schmartz AC, Meyer-Heim AD, Muller R, Bolliger M. Measurement of muscle stiffness using robotic assisted gait orthosis in children with cerebral palsy: a proof of concept. Disabil Rehabil Assist Technol. 2011;6(1):29–37.
Keller U, Schölch S, Albisser U, Rudhe C, Curt A, Riener R, Klamroth-Marganska V. Robot-assisted arm assessments in spinal cord injured patients: a consideration of concept study. PLoS ONE. 2015;10(5): e0126948. https://doi.org/10.1371/journal.pone.0126948.PMID:25996374;PMCID:PMC4440615.
Sakzewski L, Gordon A, Eliasson A-C. The state of the evidence for intensive upper limb therapy approaches for children with unilateral cerebral palsy. J Child Neurol. 2014;29(8):1077–90.
Damiano D. Activity, activity, activity: rethinking our physical therapy approach to cerebral palsy. Phys Therap. 2006;86(11):1534–40.
Fasoli S, Fragala-Pinkham M, Hughes R, Hogan N, Krebs H, Stein J. Upper limb robotic therapy for children with hemiplegia. Am J Phys Med Rehabil. 2008;87(11):929.
Fluet G, Qiu Q, Kelly DParikh H, Ramirez D, Saleh S, Adamovich S. Interfacing a haptic robotic system with complex virtual environments to treat impaired upper extremity motor function in children with cerebral palsy. Develop Neurorehabil 2010; 13(5):335–45.
Gilliaux M, Renders A, Dispa D, Holvoet D, Sapin J, Dehez B, Detrembleur C, Lejeune TM, Stoquart G. Upper limb robot-assisted therapy in cerebral palsy a single-blind randomized controlled trial. Neurorehabil Neural Repair. 2014;29(2):183–92.
http://www.hocoma.com/products/armeo/armeospring-pediatric/.
Keller H, Riener R. Design of the pediatric arm rehabilitation robot ChARMin. In: IEEE international conference on biomedical robotics and biomechatronics (BioRob). IEEE; 2014. p. 530–535
Gassert R, Dietz V. Rehabilitation robots for the treatment of sensorimotor deficits: a neurophysiological perspective. J Neuroeng Rehabil. 2018;15(1):46. https://doi.org/10.1186/s12984-018-0383-x.PMID:29866106;PMCID:PMC5987585.
Klamroth-Marganska V, Blanco J, Campen K, et al. Three-dimensional, task-specific robot therapy of the arm after stroke: a multicentre, parallel-group randomised trial. Lancet Neurol. 2014;13(2):159–66.
Mehrholz J, Thomas S, Kugler J, Pohl M, Elsner B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst Rev. 2020;10(10):CD006185. https://doi.org/10.1002/14651858.CD006185.pub5. PMID: 33091160; PMCID: PMC8189995.
Calabrò RS, Naro A, Russo M, Milardi D, Leo A, Filoni S, Trinchera A, Bramanti P. Is two better than one? Muscle vibration plus robotic rehabilitation to improve upper limb spasticity and function: a pilot randomized controlled trial. PLoS ONE. 2017;12(10): e0185936. https://doi.org/10.1371/journal.pone.0185936.PMID:28973024;PMCID:PMC5626518.
Paci M, Nannetti L, Casavola D, Lombardi B. Differences in motor recovery between upper and lower limbs: does stroke subtype make the difference? Int J Rehabil Res. 2016;39:185.
Lo AC, et al. Robot-assisted therapy for long-term upper-limb impairment after stroke. New Engl J Med. 2010;362:1772–83.
Hesse S, Gotthard S-T, Konrad M, Bardeleben A, Werner C. Robot-assisted arm trainer for the passive and active practice of bilateral forearm and wrist movements in hemiparetic. Arch Phys Med Rehab. 2003;84:915–20.
Wolf SL, et al. The HAAPI (home Arm assistance progression initiative) trial. Neurorehabil Neural Repair. 2015;29:958–68.
Burgar C, Lum P, Shor P, der Loos MH. Development of robots for rehabilitation therapy: the Palo Alto VA/Stanford experience. J Rehabil Res Dev. 2000;37:663–73.
Takahashi K, et al. Efficacy of upper extremity robotic therapy in subacute poststroke hemiplegia. Stroke. 2018;47:1385–8.
Hwang C, Seong J, Son D-S. Individual finger synchronized robot-assisted hand rehabilitation in subacute to chronic stroke: a prospective randomized clinical trial of efficacy. Clin Rehabil. 2011;26:696–704.
Kim J, Lee BS, Lee HJ, Kim HR, Cho DY, Lim JE, Kim JJ, Kim HY, Han ZA. Clinical efficacy of upper limb robotic therapy in people with tetraplegia: a pilot randomized controlled trial. Spinal Cord. 2019;57(1):49–57. https://doi.org/10.1038/s41393-018-0190-z. Epub 2018 Sep 11. Erratum in: Spinal Cord. 2019 Feb 4;: PMID: 30206423.
Metzger J, Lambercy O, Gassert R. Performance comparison of interaction control strategies on a hand rehabilitation robot. In: IEEE international conference on rehabilitation robotics (ICORR); 2015. p. 846–51. https://doi.org/10.1109/ICORR.2015.7281308.
Özen Ö, Penalver-Andres J, Ortega EV, Buetler KA, Marchal-Crespo L.Haptic rendering modulates task performance, physical effort and movement strategy during robot-assisted training. In: 8th IEEE RAS/EMBS international conference for biomedical robotics and biomechatronics (BioRob); 2020. p. 1223–1228. https://doi.org/10.1109/BioRob49111.2020.9224317.
Just F, Özen Ö, Tortora S, Klamroth-Marganska V, Riener R, Rauter G. Human arm weight compensation in rehabilitation robotics: efficacy of three distinct methods. J Neuroeng Rehabil. 2020;17(1):13. https://doi.org/10.1186/s12984-020-0644-3.PMID:32024528;PMCID:PMC7003349.
Özen Ö, Buetler KA, Marchal-Crespo L. Towards functional robotic training: motor learning of dynamic tasks is enhanced by haptic rendering but hampered by arm weight support. J Neuroeng Rehabil. 2022;19(1):19. https://doi.org/10.1186/s12984-022-00993-w PMID: 35152897.
Baur K, Speth F, Nagle A, Riener R, Klamroth-Marganska V. Music meets robotics: a prospective randomized study on motivation during robot aided therapy. J Neuroeng Rehabil. 2018;15(1):79. https://doi.org/10.1186/s12984-018-0413-8.PMID:30115082;PMCID:PMC6097420.
Krakauer JW, Kitago T, Goldsmith J, Ahmad O, Roy P, Stein J, Bishop L, Casey K, Valladares B, Harran MD, Cortés JC, Forrence A, Xu J, DeLuzio S, Held JP, Schwarz A, Steiner L, Widmer M, Jordan K, Ludwig D, Moore M, Barbera M, Vora I, Stockley R, Celnik P, Zeiler S, Branscheidt M, Kwakkel G, Luft AR. Comparing a novel neuroanimation experience to conventional therapy for high-dose intensive upper-limb training in subacute stroke: the SMARTS2 randomized trial. Neurorehabil Neural Repair. 2021;35(5):393–405. https://doi.org/10.1177/15459683211000730 Epub 2021 Mar 20 PMID: 33745372.
Baur K, Schättin A, de Bruin ED, Riener R, Duarte JE, Wolf P. Trends in robot-assisted and virtual reality-assisted neuromuscular therapy: a systematic review of health-related multiplayer games. J Neuroeng Rehabil. 2018;15(1):1–19.
Baur K, Wolf P, Klamroth-Marganska V, Bierbauer W, Scholz U, Riener R, Duarte JE. Robot-supported multiplayer rehabilitation: feasibility study of haptically linked patient-spouse training. In: IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE; 2018. p. 4679–84.
Calabrò RS, Russo M, Naro A, Milardi D, Balletta T, Leo A, Filoni S, Bramanti P. Who may benefit from armeo power treatment? a neurophysiological approach to predict neurorehabilitation outcomes. PM R. 2016;8(10):971–8. https://doi.org/10.1016/j.pmrj.2016.02.004 Epub 2016 Feb 20 PMID: 26902866.
Buschfort R, et al. Arm studio to intensify the upper limb rehabilitation after stroke: concept, acceptance, utilization and preliminary clinical results. J Rehabil Med. 2010;42:310–4.
Acknowledgements
We thank all people who contributed to the development and clinical application of ARMin, including Prof. Dr. med. V. Dietz, M. Guidali, A. Brunschweiler, A. Rotta, and A. Kollmar. Furthermore, we want to thank all participating patients and our clinical partners contributing to the multicenter study. The research was and is still funded in part by NCCR Neuro, Swiss National Science Foundation, Hans-Eggenberger Foundation, Bangerter-Rhyner Foundation, and ETH Foundation.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Nef, T., Klamroth-Marganska, V., Keller, U., Riener, R. (2022). Three-Dimensional Multi-Degree-of-Freedom Arm Therapy Robot (ARMin). In: Reinkensmeyer, D.J., Marchal-Crespo, L., Dietz, V. (eds) Neurorehabilitation Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-08995-4_27
Download citation
DOI: https://doi.org/10.1007/978-3-031-08995-4_27
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-08994-7
Online ISBN: 978-3-031-08995-4
eBook Packages: MedicineMedicine (R0)