
Abstract
My career in Mechanical Engineering began in 2005 as a postdoctoral associate in the Department of Mechanical and Aerospace Engineering at the University of California, Davis. My postdoctoral research focused on developing a mobile agent system called Mobile-C and using Mobile-C to enable mobile robotic systems to dynamically accept and execute mobile software agents (computer programs). In 2007, I joined Michigan Technological University as an Assistant Professor in the Department of Mechanical Engineering – Engineering Mechanics. Since then, I have been collaborating with my colleagues and industrial partners to develop advanced control technologies in several research and educational projects funded by the Department of Energy and Industry. The objectives of these projects include the development of an interdisciplinary curriculum that can lead to a Master of Engineering degree and graduate certificate in advanced electric-drive vehicles, the development of an advanced gasoline turbocharged direct injection engine, and the predictive control of connected vehicles to reduce energy consumption. I have also collaborated with Argonne National Laboratory EV–Smart Grid Interoperability Center to develop control strategies for electric vehicle and grid integration. Through these projects, I have established a research program in the areas of connected and automated vehicles and electric vehicle–grid integration.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- CONNECTED and automated vehicles
- Electric vehicle–smart grid integration
- Predictive control
- Vehicle electrification
Introduction
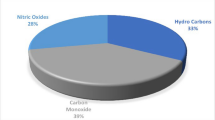
The transportation sector is a large energy consumer and one of the largest contributors to the US greenhouse gas (GHG) emissions. Energy use for transportation was about 26% of the total US energy consumption in 2020 [1]. In addition, transportation accounted for the largest portion (29%) of the total US GHG emissions in 2019 [2]. To reduce the energy consumption and emissions of the transportation sector, the market for electric vehicles (EVs) and hybrid electric vehicles (HEVs) is growing at an unprecedented pace. The electrified transportation presents two areas of research trends: (1) building efficient EVs/HEVs and EV charging infrastructure to form an EV ecosystem for all-electric future; (2) exploring advanced technologies using vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications to further reduce energy consumption of connected and automated vehicles (CAV). My recent research in automotive controls aligns with these two emerging areas.
Prior to joining Michigan Tech in 2007, I was a postdoctoral associate in the department of Mechanical and Aerospace Engineering at the University of California, Davis. My postdoctoral research primarily lies in intelligent agent systems. An intelligent agent is an autonomous computational entity that is able to perceive, reason, and initiate activities in its environment. It is intelligent and adaptive, usually programmed with artificial intelligence approaches. It can communicate with other agents, work cooperatively, and take autonomous actions in order to achieve its design goals. I developed a mobile agent system called Mobile-C [3]. Mobile-C supports mobile agents by integrating an embeddable C/C++ interpreter into an agent system platform as a mobile agent execution engine. Mobile agents are intelligent agents that can move from one computer to another in a network, while being executed in multiple computers. Mobile-C provides communication services to support agent communication and migration through message passing. With mobile agent systems, a control network is able to adopt newly developed control algorithms and make adjustments in response to operational or task changes. To apply Mobile-C in intelligent transportation systems, a comprehensive literature review has been conducted and resulted in a survey paper [4] (Best Survey Paper Award) that has been cited over 680 times. Mobile-C has been applied for distributed traffic detection and management to enhance the flexibility and reduce raw data transmission [5]. After joining Michigan Tech, I received research funding from the National Science Foundation to explore fundamental scientific issues that could potentially lead to adaptive sensing and monitoring based on agent technology and immune-inspired pattern recognition methods. My research group established a mobile agent–based monitoring paradigm to overcome the major limitations of a wireless monitoring network, such as the adaptability and communication bandwidth. A mobile agent–based monitoring network was developed by integrating Mobile-C with high-computational power-sensing hardware [6]. The mobile agent–based monitoring network moves detection algorithms instead of raw sensor data, which significantly reduces the amount of data transferred. Multi-objective optimization algorithms were developed to optimally control the generation and distribution of mobile monitoring agents [7]. The agent distribution was controlled to increase the detection probability and extend the network lifetime. The immune-based pattern recognition algorithms for damage detection, classification, and emergent pattern recognition have also been developed [8, 9]. The developed pattern recognition algorithms mimic immune recognition mechanisms that possess adaptation, evolution, and immune learning capabilities. The damage patterns are represented by feature vectors that are extracted from structure’s dynamic measurements. The training process is designed based on the clonal selection principle of the immune system, which allows the classifier to improve the quality of representative feature vectors based on input data. One paper based on this research work received a Best Paper Award at 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications.
Shortly after joining Michigan Tech, I realized that it is important to expand my research areas so I can submit proposals to more funding agencies. I also noticed that research collaboration is common in large research projects. To write collaborative research proposals, I actively searched the potential collaborators who have synergy with my research expertise. An opportunity arose in a project in which I collaborated with colleagues at Michigan Tech to develop engine controllers for Nostrum Energy LLC. The research area is very different from my prior research in intelligent agent systems. Through the collaboration, I not only learned required knowledge in internal combustion engines, but also gained research experience in conducting industrial research projects. This collaboration also helped me to build long-lasting research collaborations, which has resulted in multiple large research projects funded by the Department of Energy and industrial partners. These projects include an Interdisciplinary Program for Education and Outreach in Transportation Electrification; MTU subcontract for Ford DOE Project: Advanced Gasoline Turbocharged Direct Injection Engine Development; NEXTCAR: Connected and Automated Control for Vehicle Dynamics and Powertrain Operation on a Light-Duty Multi-Mode Hybrid Electric Vehicle; Energy Optimization of Light and Heavy-Duty Vehicle Cohorts of Mixed Connectivity, Automation and Propulsion System Capabilities via Meshed V2V–V2I and Expanded Data Sharing; and ARPA-E NEXTCAR Phase II – L4/L5 CAV Enabled Energy Reduction, where L4/L5 stands for level 4/level 5 of vehicle autonomy. My experience has shown that research collaboration is important for junior faculty members to gain research skills necessary to conduct large research projects, expand professional network, and build long-lasting research collaborators. Through these research projects, my research in automotive control has also expanded from small-scale to large-scale automotive control systems, such as the development of engine controller, HEV powertrain supervisory controller, predictive vehicle dynamics and powertrain control, and connected vehicle control for intelligent transportation systems.
In addition to collaboration with colleagues at MTU, I also seek external research collaborations to build long-term partnerships. During my sabbatical leave from 2014 to 2015, I worked with the EV–Smart Grid Interoperability Center at DOE Argonne National Laboratory (ANL) in Chicago. The ANL EV Smart Grid Interoperability Center supports global harmonization of standards and technology for the EV–grid interface, as well as charging interoperability to ensure future electric vehicles and charging stations worldwide work together seamlessly. The work experience at ANL expanded my research area into EV–smart grid integration and provided me opportunities to work with other national laboratories and international organizations, such as the Joint Research Centre of the European Commission.
In the past 14 years, my research group has developed various control algorithms for internal combustion (IC) engines, energy management strategies of hybrid electric vehicles, predictive control systems for connected and automated vehicles, and advanced control strategies for EV grid integration. My research projects have been supported by grants and contracts totaling over ten million dollars from government funding agencies, Argonne National Laboratory, and industry. The research has resulted in over 100 refereed publications in premier archival journals and conference papers and a number of Best Paper Awards/Best Student Paper Awards. My research and educational achievements have been recognized by the American Society of Mechanical Engineers (ASME). I have been elected a Fellow of ASME in 2020.
This chapter introduces my research and educational efforts in the automotive control area to reduce vehicle energy consumption and greenhouse gas emissions. The rest of the chapter is organized as follows. Section “Research on developing intelligent control systems for advancing vehicle electrification” introduces my research work on control development for HEVs, connected and automated vehicles, and electric vehicle–grid integration. Section “Educational effort to prepare students for transportation electrification” presents my educational effort for transportation electrification. Section “Conclusions” concludes the chapter.
Research on Developing Intelligent Control Systems for Advancing Vehicle Electrification
This section introduces two of my research areas: vehicle control and electric vehicle–grid integration. The scope of vehicle control ranges from powertrain component control such as IC engine control, HEV control, connected and automated vehicle control, and energy optimization of vehicle cohorts. The electric vehicle–grid integration research studies the impact of EV charging on grid and develops optimal control strategies to mitigate this impact.
Advanced Vehicle/Powertrain Control and Predictive Control of Connected and Automated Vehicles
Over the past decade, my research group has been collaborating with Ford Motor Company and Nostrum Energy LLC to develop advanced control strategies for IC engines. The group has developed stochastic knock detection and control strategies for a Ford EcoBoost engine. The developed algorithms have been integrated with a production engine controller for the real-time knock detection and control on an engine test cell [10]. A recent work in combustion engine control is a model-based control system for cycle-by-cycle control of a gasoline turbocharged direct injection spark-ignition engine using an economic nonlinear model predictive controller (E-NMPC) [11, 12]. The E-NMPC engine control system is designed to meet driver-requested torque output, minimize fuel consumption, and reduce NOx emissions. These control objectives are achieved by controlling throttle position, spark timing, intake and exhaust valve phasing, and wastegate position with the consideration of engine operating constraints, including both physical limitations of actuators and thresholds of abnormal combustion metrics comprising high variation of indicated mean effective pressure and combustion knock.
With the experience gained from engine control projects, I have learned working principles of engines and vehicles, which enables me to expand my research scope to HEV control. In the hybrid electric vehicle control area, my group has studied various optimal control strategies for HEV energy management, such as Equivalent Consumption Management Strategy (ECMS), adaptive ECMS, dynamic programming, and model predictive control. The group has received three Best Student Paper Awards for HEV modeling and control. One example of this area of work is the development of a predicative HEV energy management strategy with the consideration of both fuel economy and quantified lithium-ion battery aging [13]. In this work, the battery aging rate is quantified based on an electrochemical lithium-ion battery model, which is able to provide quantified aging characteristics for the increase of internal resistance and decrease of battery capacity. The battery aging factor is quantified by changing factors of the battery, including state of charge (SOC), charging rate and internal temperature of the cell. The energy management system is developed using a nonlinear model predictive control (NMPC) method to find an optimized control sequence over the prediction horizon, which minimizes engine fuel consumption and improves battery aging. The NMPC energy management considering battery aging is compared to an NMPC that does not consider the battery aging. It is found that with the optimized weighting factor selection, the NMPC with the consideration of battery aging has better battery aging performance and similar fuel economy performance compared to the NMPC without the consideration of battery aging. In addition to HEV powertrain energy management, my group has also studied the driving pattern recognition using features such as average cycle speed, acceleration, percentage time of low/medium/high speed, etc. to identify driving scenarios such as urban driving or highway driving [14]. The impact of aggressive driving on HEVs has also been investigated with a focus of powertrain energy flows, the energy consumption of individual powertrain components, their operating regions, and the energy losses of these components.
My recent research on vehicle control has shifted from isolated and reactive control to connected and predictive control. Vehicles on road currently operate in isolation and rely on a human driver to provide high-level dynamic control of the vehicle. The vehicle controllers lack the ability of prediction and automatic adaptation to the changes of traffic and road conditions. With the advancement of V2V and V2I technologies, more and more real-time information regarding traffic and transportation systems will be available to vehicles. As the control thrust leader of the MTU NEXTCAR project funded by DOE ARPA-E, my group has developed a model predictive control system to reduce energy consumption of a multimode plug-in hybrid electric vehicle (PHEV) by leveraging future traffic and road information obtained through V2V and V2I communications. This information is incorporated with vehicle dynamics and constraints for making the control decisions on vehicle-operating mode and powertrain energy management. The model predictive control system is also designed to enable connected and automated vehicle applications such as eco-approach and departure at signalized intersections, platooning, and cooperative adaptive cruise control.
The predictive control system is a multilevel control system as shown in Fig. 1. The predictive control system receives velocity bounds and road grade for a prediction horizon from a cloud computing center. The velocity bounds define a range of velocities within which a connected vehicle can operate. These bounds are generated by a traffic simulator considering real-time traffic condition and safety. The control system outputs can be displayed on a human–machine interface (HMI) to provide real-time feedback to the driver. The top level of the predictive control system is a novel algorithm that uses velocity bounds and powertrain information to generate an optimal velocity trajectory over the prediction horizon [15, 16]. The objectives of the velocity trajectory generation algorithm are to reduce dynamic losses, required tractive force, and to complete trip distance with a given travel time. When applied to a GM Volt-2, the generated velocity trajectory saves fuel compared to baseline energy consumption for a real-world drive cycle for both charge sustaining and charge depleting operations. The charge sustaining mode of a PHEV utilizes a combination of engine and motor power to maintain the SOC at a specified level, while the charge-depleting mode operates the vehicle solely on the battery energy. The simulation results show the energy savings ranging from 1.36% to 9.16% for charge sustaining case and 6.91% to 9.63% for charge depleting case. The baseline energy consumption is obtained using logged vehicle velocity profiles for the same drive cycle. The middle level of the predictive control system is the optimal mode selection for the drive unit using a discrete optimal mode path planning (OMPP) algorithm [17]. GM Volt-2 has five models: 1-EV mode, 2-EV mode, low extended range mode, fixed ratio extended range mode, and high extended range mode. The optimal mode at each time instant within a given prediction horizon is selected to minimize the engine fuel consumption, the deviation of the actual SOC from the reference SOC, and the energy required for mode shifts. The bottom-level of the control system is an NMPC power-split controller [18]. With the vehicle velocity trajectory and the drive unit mode selected by the upper levels of the control system, the NMPC power-split controller makes torque-split decisions among two electric motors and one combustion engine such that fuel consumption is minimized while battery SOC and vehicle velocity targets are met. The OMPP algorithm is integrated with NMPC power-split controller in order to create an integrated predictive powertrain controller (IPPC). The IPPC has been extensively tested in simulation across multiple real-world driving cycles where energy savings have been demonstrated. Simulation testing reveals that the IPPC can provide a 4–10% energy savings in standard drive cycles and a 3–7% energy savings over nonstandard, real-world drive cycles. The IPPC has also been deployed and tested in real time on test vehicles equipped with rapid prototyping embedded controllers. Real-time in-vehicle testing shows that the IPPC provides an energy savings of 4–6% over baseline vehicle control while achieving computational turnaround times suitable for real-time control. This work has demonstrated the feasibility of utilizing CAV technologies and predictive controls to reduce the energy consumption of connected vehicles.

Overview of MTU NEXTCAR predictive control system for connected vehicles
My research in vehicle electrification to reduce energy consumption and GHG emissions continues. Currently, I am participating in two recently funded research projects by the Department of Energy. One project, “Energy Optimization of Light and Heavy-Duty Vehicle Cohorts of Mixed Connectivity, Automation and Propulsion System Capabilities via Meshed V2V–V2I and Expanded Data Sharing” aims to reduce energy consumption through expanded V2V–V2I communication and the use of cloud computing and multi-agent optimization. Energy optimization for connected and automated vehicles has been focused for a single vehicle or a fleet of identical vehicles. This MTU project, in partnership with AVL Powertrain Engineering Inc., Borg Warner Inc., Traffic Technology Services Inc., American Center for Mobility and Navistar, will investigate the energy optimization for mixed vehicle cohorts consisting of light and heavy-duty vehicles with various levels of connectivity, driving automation, and propulsion systems.
The second project is MTU NEXTCAR Phase II. The shift to fully autonomous transport is moving forward fast. Based on NEXTCAR Phase I technologies, MTU NEXTCAR Phase II is developing connected and automated vehicle technologies to demonstrate energy saving on level 4/level 5 autonomous vehicles. Partnership with GM and FCA, technologies for level 4 automated vehicles will be added to Chevrolet Bolt EV, 48 V mild HEV RAM1500, and Chrysler Pacifica PHEV. The level 4 vehicle test fleet of the project provides representative propulsion systems: EV to HEV and compact to full-sized truck. The diversity of vehicle and propulsion systems will provide an understanding of the energy reduction potential for level 4 autonomous vehicles with respect to mass, size, and propulsion system.
Electric Vehicle and Smart Grid Integration
Accelerating EV adoption requires more public charging stations nationwide in addition to charging capability at home and at work. The evolution of electrified transportation represents a potentially large growth in electrical load that may impact electrical power grids by contributing to peak loads and changing the loading patterns of electricity distribution equipment if vehicle charging is not properly coordinated and integrated as part of a larger electricity system. I started to do research in this area when I was on sabbatical leave at Argonne National Laboratory from 2014 to 2015. Since the sabbatical leave, my group has been working with ANL EV–Smart Grid Interoperability Center to develop advanced control strategies for effective EV and grid integration. A Hardware-in-the-Loop (HIL) framework, which consists of a real-time power grid simulator Opal-RT, various types of EV charging stations (AC/DC/extreme fast charger), solar panels, and building loads, is developed to validate vehicle-to-grid integration (VGI) communication and control algorithms at different power levels and scales. The HIL system is able to read real-time power generation/consumption measurements, simulate charging impact on power grid, and communicate with charging controllers via cloud communication for the coordination of EV charging with renewable energy generation and building loads to mitigate charging impact. Currently, the work is focused on translating charging behavior of ANL Smart Energy Building to a distributed network model, integrating utility grid, and testing the impact of EV charging on grid stability with EVs at scale.
In the EV–grid integration area, my group has investigated various aspects as shown in Fig. 2, including the estimation of EV charging load, the impact of EV charging on distribution grid, optimal EV charging control strategies to mitigate this impact, and using EV battery to provide grid services such as frequency regulation and voltage regulation [19]. The optimal EV charging control strategies have been developed for different levels and scales, including bidirectional power flow control of an onboard charger [20], plug-in electric vehicle (PEV) charging control in microgrids with renewable energy sources [21] (Best Student Paper Award in 2017), integrating utility demand response control signals for charging control, game theory approach for the management of PEV-charging activities in a distribution network [22], and transactive energy–based charging control [23] (Student Paper Award in 2019), which enables the integration of a market in charging control to achieve a socially optimal solution. Paper [24] studies the impact of aggregated residential and PEV charging load to several aspects of a grid, including load surge, voltage deviation, and the aging of distribution transformers. An optimal charging control method is proposed with the consideration of utility demand response control signals (time-of-use and direct load control) to mitigate the impact. Paper [25] presents a distributed control strategy to solve the power management problem for large-scale PEVs. Paper [26] further considers the use of EV batteries to put the energy back to the grid for regulating grid frequency. This grid service is called vehicle-to-grid (V2G) integration. Unlike stationary energy storage systems, using EVs to provide grid service is difficult because the EVs are movable and the available battery energy (the state of charge of the batteries) depends on individual travel plans. A distributed control scheme is developed that is able to make real-time charging/discharging control decisions based on the current grid frequency deviation, real-time electricity price, and individual EV charging requirements. The control algorithm is able to handle the dynamics of available EVs, the location of EVs, and the grid conditions.

EV–grid integration research in the Laboratory of Intelligent Mechatronics and Embedded Systems at Michigan Tech
The successful research collaboration with National Laboratories has made me an expert in EV–grid integration. I have contributed to a DOE EV–Smart Grid Integration Requirements Study conducted by multiple National Laboratories to define the engineering requirements for smart grid operations to enable vehicle-to-grid integration in the US. I identified key VGI factors and suggested research opportunities in various aspects of VGI, including system architecture, communication standards, sensing, control, grid management, and cyber security. I have also been invited to attend technical meetings on the cybersecurity of electric vehicle–charging infrastructure organized by several offices at DOE and NIST to identify the gaps and vulnerabilities in this threat space. I have also participated in a series of DOE-organized conversation topic calls on forecasting approaches that address the growing adoption of electric vehicles.
Educational Effort to Prepare Students for Transportation Electrification
I have actively participated in curriculum development and contributed to an Interdisciplinary Program for Education and Outreach in Transportation Electrification funded by DOE. The primary objective of this project is the development of an interdisciplinary curriculum that can lead to a Master of Engineering degree, and graduate and undergraduate certificates in Advanced Electric-Drive Vehicles. I developed a graduate-level course, “Distributed Embedded Control Systems,” for this project. The course is co-listed in both Mechanical Engineering–Engineering Mechanics (ME–EM) and Electrical and Computer Engineering (ECE) departments. The course aims at developing an understanding of the model-based embedded control systems design and provides students with hands-on experience that is critical for the control development for hybrid electric vehicles. Several teaching labs and a final project have also been designed allowing students to develop control strategies, using an industrial standard rapid control prototype system. The course has been very well received by graduate students in both ME–EM and ECE departments at Michigan Technological University. This course has been selected as one of the courses of a graduate certificate in Advanced Electric-Drive Vehicles and a graduate certificate in Automotive Systems and Controls.
Requested by graduate students both from ME–EM and ECE departments, I have developed 20 project-based courses related to Vehicle Electrification, including Modeling and Hardware-in-the-Loop Test of Hybrid Vehicle Powertrain Systems, Model Predictive Control for Hybrid Electric Vehicle Powertrain Systems, CAN Communication for dSPACE HEV HIL Simulation System, Optimization and Scheduling of PEV Charging/Discharging, and Path Planning and Tracking Control for Automatic Parking Assist Systems. Project-based courses offer opportunities for graduate students to learn by actively engaging in real-world engineering projects that they are interested in. Through project-based courses, students develop critical thinking, creativity, and communication skills. Feedback from students reflects that this learning experience is very helpful and valued by the companies that they have interviewed with.
I advise graduate students in both ME–EM and ECE departments. Most of my graduated students work in the automotive industry after graduation. These students are well prepared for the control development for electrified vehicles. They have very good academic records which are evidenced by multiple awards received by them, including four Best Student Paper Awards, one Best Paper Award, one Student Paper Award, one SAE Oral Presentation Award, four Michigan Tech Outstanding Graduate Student Teaching Awards, one Michigan Tech Finishing Fellowship Award, and four Outstanding Scholarship Awards in the Mechanical Engineering Department.
I have contributed to education outreach for undergraduate students. My NSF project “REU Site: Research in Advanced Propulsion and Fuel Technology for Sustainable Transportation,” provided the opportunity for 30 highly talented undergraduate students from the US universities to participate in interdisciplinary research projects related to advanced propulsion control and sustainable transportation. REU students spent 40 h per week on research activities over a 10-week period in the summer. REU students also attended professional meetings, seminars, and in-depth information sessions related to applying to graduate school and obtaining funding. These opportunities increased students’ interest in conducting research, problem-solving skills, ability to effectively collaborate as part of a team, and improved communication skills. I also mentored several undergraduate students in research projects and summer undergraduate research fellowship programs.
Conclusions
In this chapter, I have presented the research trends of transportation electrification and my professional journey at Michigan Tech. Several emerging research areas in electrified transportation and smart mobility have been discussed, including vehicle electrification, connected and automated vehicles enabled by V2V and V2I communications, EV-charging infrastructure, and EV–grid integration. For smart mobility, vehicle control has shifted from isolated and reactive control to connected and predictive control to allow vehicles automatically adapting to the changes of traffic and road conditions.
My professional career at Michigan Tech spans more than a decade from an Assistant Professor to a Full Professor. I feel that establishing an externally funded research program is important, however, this may be challenging for junior faculty members. From my experience, research collaboration helps to expand research areas, gain research skills for conducting large research projects, learn graduate student mentoring, expand professional networks, and build long-lasting research collaborators.
References
“Energy use for transportation.” eia.gov. https://www.eia.gov/energyexplained/use-of-energy/transportation.php (accessed July 3, 2021).
“Fast facts on transportation greenhouse gas emissions.” epa.gov. https://www.epa.gov/greenvehicles/fast-facts-transportation-greenhouse-gas-emissions (accessed July 3, 2021).
B. Chen, H. H. Cheng, and J. Palen, “Mobile-C: a mobile agent platform for mobile C/C++ agents,” Software-Practice & Experience, vol. 36, pp. 1711–1733, 2006.
B. Chen and H. H. Cheng, “A review of the applications of agent technology in traffic and transportation systems,” IEEE Transaction on Intelligent Transportation Systems, vol. 11, pp. 485–497, 2010.
B. Chen, H. H. Cheng, and J. Palen, “Integrating mobile agent technology with multi-agent systems for distributed traffic detection and management systems,” Transportation Research Part C: Emerging Technologies, vol. 17, pp. 1–10, 2009.
B. Chen and W. Liu, “Mobile agent computing paradigm for building a flexible structural health monitoring sensor network,” Journal of Computer-Aided Civil and Infrastructure Engineering, vol. 25, pp. 504–516, 2010.
W. Liu and B. Chen, “Optimal control of mobile monitoring agents in immune-inspired wireless monitoring networks,” Journal of Network and Computer Applications, vol. 34, pp. 1818–1826, 2011.
B. Chen and C. Zang, “A hybrid immune model for unsupervised structural damage pattern recognition,” Expert Systems with Applications, vol. 38, pp. 1650–1658, 2011.
B. Chen and C. Zang, “Emergent damage pattern recognition using immune network theory,” Smart Structures and System, vol. 8, pp. 69–92, 2011.
W. Luo, B. Chen, J. Naber, and C. Glugla, “Stochastic knock detection, control, software integration, and evaluation on a V6 spark-ignition engine under steady-state operation,” presented at the SAE 2014 World Congress, Detroit, MI, 2014.
X. Wang, “A study of model-based control strategy for a gasoline turbocharged direct injection spark ignited engine,” Ph.D. dissertation, Mechanical Engineering – Engineering Mechanics, Michigan Technological University, Houghton, MI, USA, 2020.
X. Wang, A. Khameneian, P. Dice, B. Chen, M. Shahbakhti, J. D. Naber, et al., “Control-oriented model-based burn duration and ignition timing prediction with recursive-least-square adaptation for closed-loop combustion phasing control of spark-ignition engines,” presented at the ASME 2019 Dynamic Systems and Control Conference, Park City, Utah, 2019.
M. Cheng and B. Chen, “Nonlinear model predictive control of a power-split hybrid electric vehicle with consideration of battery aging,” Journal of Dynamic Systems, Measurement and Control, vol. 141, 2019.
L. Feng, W. Liu, and B. Chen, “Driving pattern recognition for adaptive hybrid vehicle control,” SAE International Journal of Alternative Powertrains, vol. 1, pp. 169–179, 2012.
P. K. Bhat, J. Oncken, R. Yadav, B. Chen, M. Shahbakhti, and D. Robinette, “Generation of optimal velocity trajectory for real-time predictive control of a multi-mode PHEV,” presented at the 2019 IEEE 90th Vehicular Technology Conference: VTC2019-Fall, Honolulu, Hawaii, USA, 2019.
B. Barik, P. K. Bhat, J. Oncken, B. Chen, J. Orlando, and D. Robinette, “Optimal velocity prediction for fuel economy improvement of connected vehicles,” IET Intelligent Transport Systems, vol. 12, pp. 1329 – 1335, 2018.
J. Oncken, K. Sachdeva, H. Wang, and B. Chen, “Integrated predictive powertrain control for a multi-mode plug-in hybrid electric vehicle,” IEEE/ASME Transactions on Mechatronics, vol. 26, pp. 1248–1259, 2021.
J. Oncken and B. Chen, “Real-time model predictive powertrain control for a connected plug-in hybrid electric vehicle,” IEEE Transactions on Vehicular Technology, vol. 69, pp. 8420–8432, 2020.
C. Cao, Z. Wu, and B. Chen, “Electric vehicle – Grid integration with voltage regulation in radial distribution networks,” Energies, vol. 30, 2020.
L. Wang, C. Cao, and B. Chen, “Grid-tied single-phase bi-directional PEV charging/discharging control,” SAE Int. J. Passeng. Cars – Electron. Electr. Syst. , vol. 9, pp. 275–285, 2016.
C. Cao, L. Wang, B. Chen, J. D. Harper, T. P. Bohn, D. S. Dobrzynski, et al., “Real-time modeling to enable hardware-in-the-loop simulation of plug-in electric vehicle-grid interaction,” presented at the 2017 ASME/IEEE International Conference on Mechatronic and Embedded Systems and Applications (MESA2017), Cleveland, Ohio, 2017.
C. Cao and B. Chen, “Generalized Nash equilibrium problem based electric vehicle charging management in distribution networks,” International Journal of Energy Research, vol. 42, pp. 4584–4596, 2018.
Z. Wu, C. Cao, and B. Chen, “Transactive energy based approach for large-scale plug-in electric vehicle charging control,” presented at the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 2019.
C. Cao, L. Wang, and B. Chen, “Mitigation of the impact of high plug-in electric vehicle penetration on residential distribution grid using smart charging strategies,” Energies, vol. 9, 2016.
L. Wang and B. Chen, “Distributed control for large-scale plug-in electric vehicle charging with a consensus algorithm,” International Journal of Electrical Power and Energy Systems, vol. 109, pp. 369–383, 2019.
L. Wang and B. Chen, “Dual-level consensus-based frequency regulation using vehicle-to-grid service,” Electric Power Systems Research, vol. 167, pp. 261–276, 2019.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Chen, B. (2022). Intelligent Control to Reduce Vehicle Energy Consumption and Greenhouse Gas Emissions. In: Bailey, M., Shackelford, L. (eds) Women in Mechanical Engineering. Women in Engineering and Science. Springer, Cham. https://doi.org/10.1007/978-3-030-91546-9_14
Download citation
DOI: https://doi.org/10.1007/978-3-030-91546-9_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-91545-2
Online ISBN: 978-3-030-91546-9
eBook Packages: EngineeringEngineering (R0)