
Abstract
Warehousing system plays an increasingly important role in the development of industry. However, the traditional warehousing system has the disadvantages of low efficiency, large space occupation and high maintenance difficulty, which has been unable to meet the needs of economic and social development. The demand for high efficiency and high stability intelligent storage system is more and more urgent. With the characteristics of large workspace and strong flexibility, suspended cable-driven parallel robot has great application potential in the field of intelligent storage. In this paper, the foundation of a two-layer suspended cable-driven parallel robot was proposed to meet the requirements of intelligent storage. Based on this foundation, a double layer suspended cable-driven parallel robot was established. The kinematics model of the double layer suspended cable-driven parallel robot was established, and the cable length curve in a motion period was obtained. Based on Hamilton's principle, the vibration model of the double layer suspended cable-driven parallel robot was established. The motion and vibration characteristics of the robot were analyzed in ADAMS, and the vibration law of the system was obtained.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Intelligent storage
- Suspended cable-driven parallel robot
- Bilayer configuration
- Vibration characteristics
1 Introduction
With the rapid development of national modernization, all kinds of factories, large-scale warehousing and logistics centers urgently need an intelligent warehousing system with high utilization rate and strong stability. In particular, the warehousing system has occupied a major position in the logistics link, which is related to the storage, distribution and information circulation of products, and has an increasingly important impact on the cost and efficiency of the entire industrial ecosystem. At the same time, the cost of human and land resources is rising, and the traditional storage system gradually shows the defects of low space utilization and low operation efficiency, which is difficult to meet the needs of economic and social development.
Therefore, the unmanned intelligent storage system has become a research hotspot, and the performance of the storage robot is directly related to the function realization of the storage system. In other words, in a warehouse center of the same scale, the more shelves there are, the stronger the ability of the storage system to store goods; the less storage robots are used, the higher the stability of the storage system. This requires the storage robot to have the characteristics of small size, no space occupation, multi-purpose and so on.
At present, the most widely used is the automatic guided vehicle (AGV) to carry goods [1, 2]. The guided vehicle to work normally, there should stick a magnetic stripe or two-dimensional code on the ground to form a preset path, and the robot will drive according to the preset path to complete the task. However, these two navigation methods not only have the problem of poor flexibility in path transformation, but also have the disadvantages of magnetic stripe and two-dimensional code easy to break, glue opening, pollution and so on [3]. And the storage center has the characteristics of large space and many kind of goods. Using a large number of automatic guided vehicles to carry goods, there will be problems such as difficult control, high cost, difficult maintenance and so on.
Compared with AGV, cable-driven parallel robot is suitable for working in large space, because the cable driven parallel mechanism has the characteristics of larger workspace and higher efficiency [4]. Cable-driven parallel mechanism is divided into full cable-driven parallel mechanism and suspended cable-driven Parallel mechanism [5]. Cable-driving parallel robot has be applied to the storage system [6, 7], but it only transfer goods to two shelves at most. For large storage centers, there are many robots needed, which still cannot meet the actual needs. Therefore, a double layer suspended cable-driven parallel robot is proposed in this paper, which has the characteristics of compact structure, strong flexibility and multi-function.
The double layer suspended cable-driven parallel robot is coupling superposition of flexible cables. Due to the characteristics of cables, the double layer system may have forced vibration, which affects the normal transportation of goods. Therefore, in view of the long-distance transportation of goods, it is necessary to analyze the vibration of the upper and lower layers respectively. The analysis method is similar to elevator transportation, they have similar vibration characteristics [9, 10], the partial differential equation of vibration of the double layer suspended cable-driven parallel robot is established based on Hamilton principle [11,12,13]. The simulation analysis is carried out by comparing the vibration process, which provides a theoretical support for the practical application of the double layer suspended cable-driven parallel robot.
2 Configuration Selection
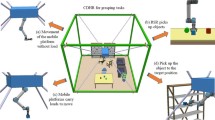
For a large storage center, as shown in Fig. 1, the inbound robot places the goods carried by the inbound truck on the inbound conveyor belt, and the double layer suspended cable-driven parallel robot is responsible for the inbound operation; similarly, the double layer suspended cable-driven parallel robot places the goods to be outbound on the outbound conveyor belt, and the outbound robot places the goods on the outbound truck.

Intelligent storage system
According to the design criteria of cable-driven parallel mechanism, the workspace of its moving platform is affected by the position of cable installation point [8]. However, the double layer suspended cable-driven parallel mechanism is quite special, because its gravity is equivalent to a cable moving in the same direction with the lower platform, so it is necessary to fully consider the accessibility of the lower platform position and the force on the cable during the task.
Based on the above analysis, this paper proposes the configuration basis of the double layer suspended cable-driven parallel robot for intelligent warehouse, as shown in Fig. 2a. The basic configuration of the double layer suspended cable-driven parallel robot is mainly composed of translation module and lifting module. The translation module controls the position of the lifting module in the X direction through the extension and shortening of the cable. However, since the translational module at any position has three attitudes, as shown in Fig. 2b, and the force and vibration of the cable in the translational module, it is necessary to add a stable cable based on this configuration to realize the translational function.

Configuration basis of double layer suspended cable-driven parallel robot
According to the configuration foundation of the double layer suspended cable-driven parallel robot, two cables and a rigid beam are added to the translational module to realize stable translational function, as shown in Fig. 3a. At this time, the translational module consists of four cables and a rigid beam, which is a stable and controllable configuration. According to the configuration of the double layer suspended cable-driven parallel robot, a double layer suspended cable-driven parallel robot for intelligent storage is designed, as shown in Fig. 3b. The robot consists of two groups of parallel module and lifting module, which ensures the balance of force on the platform, and reduces the deflection and vibration.

Double layer suspended cable-driven parallel robot
3 Kinematic Analysis
The fixed coordinate system OXY of the robot is established in the middle of the cable connection point on the upper side of the translation module, as shown in Fig. 4. In the center of the moving platform of the translational module, the dynamic coordinate system oxy of the robot is established.

Coordinate system of double layer suspended cable-driven parallel robot
Although the translational module is a redundant three degree of freedom mechanism, only one translational degree of freedom is used in this application, so the rotation matrix from the dynamic coordinate system to the static coordinate system of the double layer suspended cable-driven parallel robot is the identity matrix E.
Where, Pi is the vector from the connection point of the cable of the moving platform of the translational module to the fixed coordinate system. ni is the vector from the cable connection point of the translational module moving platform to the moving coordinate system. T is the vector from the moving coordinate system to the fixed coordinate system. m is the vector from the beam cable connection point to the fixed coordinate system. Li is the length of the cable.
In order to facilitate the kinematic analysis, the following assumptions are put forward: in the kinematic analysis of the system, the elastic deformation of the cable is ignored, the sag caused by the dead weight of the cable is ignored, and the connection points of the cable are ideal spherical hinges.
The simulation content is a inbound delivery cycle, and the outbound delivery cycle is similar to it, which will not repeated. At the initial time, the lifting module is above the warehousing conveyor belt; from 0 s to 10 s, the lifting module descends; from 10 s to 20 s, the lifting module grabs and fixes the goods; from 20 s to 30 s, the lifting module rises to the translational track position; from 30 s to 40 s, the lifting module reaches the translational track position, The translation module moves the lifting module to the top of the gap between the two designated shelves; from 40 s to 50 s, the lifting module descends to the designated container of the designated shelf; from 50 s to 60 s, the lifting module pushes the goods out to the designated position; from 60 s to 70 s, the lifting module rises to the translation track; from 70 s to 80 s, the lifting module moves to the top of the warehousing conveyor belt. In this paper, cubic spline interpolation is used to fit the path to simulate the length of the cable, and the graph of the cable length with time is obtained, as shown in Fig. 5. Because the front and rear two groups of translation module and lifting module are the same, only one group of cable data can be used to represent.

The changing law of double layer suspended cable-driven parallel robot cable
4 Vibration Characteristics
Regardless of the resonance caused by the natural frequency, this paper studies the mechanical vibration caused by the change of the state of the cable itself. According to the research, the longer the length of the flexible cable is, the smaller the stiffness is; The smaller the load, the smaller the stiffness [14]. The lifting module needs to provide a long-distance cargo displacement.
In the process of moving, the coupling of complex factors such as posture error of translational module moving platform, mutual influence between double layer cables, elastic deformation of cables and winding error will cause complex vibration of double layer cables cargo. In addition, there are transverse vibration and axial vibration in the cable, and the transverse vibration is ignored because the kinetic energy of transverse modal vibration accounts for only 0.01% [15].
However, in this paper, the cables are parallel and long, so the lateral vibration of the end load cannot be ignored. The vibration system will affect the cargo transportation function and the service life of the cable, so the research on the vibration of the double layer cable system is the premise to ensure the normal operation of the double-layer cable system. The system model of double-layer suspended cable traction parallel robot is established, as shown in Fig. 6.

Model of double layer suspended cable-driven parallel robot lifting system
The lifting module platform and the translational module platform are connected by springs with stiffness K1, K2, K3 and K4 and dampers with damping C1, C2, C3 and C4 respectively. The two sides of the loading platform and the shelf are connected by springs with stiffness of K5 and K6 and dampers with damping of C5 and C6 respectively to simulate the external excitation caused by the position and attitude error of translational module in the lifting state. The height of the lifting module loading platform is 2h, the mass is \(m_{c}\), the moment of inertia is \(J_{c}\), the displacements in X, Y and Z directions are \(v_{c}\), \(u_{c}\), \(w_{c}\), respectively, and the angular displacements are \(\theta_{c}\), respectively. The lateral displacements at the upper and lower ends of the loading platform are, \(v_{5}\), \(v_{6}\), respectively. The mass per unit length of each cable is \(\rho\), the cross-sectional area is A, and the elastic modulus is E. During the movement of the loading platform, the length of the cable is \(l_{i} (t)\), the longitudinal vibration on the cable \(x(t)\) is \(u_{i} (x,t)\), and the transverse vibration is \(v_{i} (x,t)\). \(\gamma (t) = \dot{l}(t)\) is the operating speed of the loading platform.
The geometric relationship between the lateral vibration displacement of the platform and the lateral displacement of the mass center can be equivalent to
The kinetic energy of the system during the lifting process of the lifting module is
Where, differential operator \(\frac{D}{Dt}\,{ = }\,\frac{\partial }{\partial t} + v\frac{\partial }{\partial x}\).
The elastic potential energy of the system during the lifting process of the lifting module can be written as:
During the lifting process of lifting module, the gravity potential energy of the system is defined as:
The virtual work of the system damping force during the lifting process of the lifting module is
According to the generalized Hamilton principle, the system satisfies the equation
The vibration equation of the loading platform during the lifting process of the lifting module is
According to the vibration equation and geometric relationship of the system, the transverse vibration of the platform is
\(\overline{p}(x,t)\) is the static tension of the cable due to gravity at t.
According to the above analysis, the simulation model is established in ADAMS, as shown in Fig. 7. The kinematics results of the double layer suspended cable-driven parallel robot are used for simulation analysis. Taking 20 kg and 50 kg rectangular containers as an example, 1 kg high-strength lightweight engineering plastics is used for the translational module platform. The weight of the lifting module platform is 12 times that of the translational module platform, and the weight of the goods is 20 times and 50 times that of the translational module platform. Measure the position of the cable connection point of the moving platform of the translation module and the cable connection point of the loading platform of the lifting module.

ADAMS simulation model
To determine the vibration of the system, the motion of the measuring points of the translational module and the lifting module shall be measured, as shown in Fig. 8. In the figure, the attitude error of the moving platform of translational module exists in the process of cargo transportation, but there is no obvious vibration in the X direction; the lifting module loading platform has obvious vibration during the cargo transportation, starting from the movement of the 40 s translational module, and the vibration gradually increases. The main reason of vibration is the position error of the moving platform of the translational module.
In order to determine the pose change of the moving platform of the translational module, the measurement points a and b are measured, and the difference curve of a and b is obtained, as shown in Fig. 9. In the figure, the X-direction and Y-direction vibration of the translational module appears after the translational movement starts in 30 s; the vibration amplitude is the largest in the process of loading and unloading, that is, 30 s to 60 s. At the same time, the goods with 20 times moving platform mass have high frequency vibration in Z direction after 40 s, on the contrary, the goods with 50 times moving platform mass have no vibration in Z direction.

Measure the displacement of points a and c in the X direction

The position relation of measuring points a and b
In order to determine the position and posture change of the lifting module loading platform, the measurement points c and d are measured, and the difference curve of c and d is obtained, as shown in Fig. 10.

The position relation of measuring points c and d
The vibration law of the lifting module in Fig. 10 is similar to that of the translational module above, and there is no significant difference in the amplitude. High frequency vibration also occurs in the process of 20 times the weight of the moving platform. The difference is that the Z direction of the cargo with 50 times the mass of the moving platform also vibrates.
5 Conclusion
The double layer suspended cable-driven parallel robot has good cargo transportation performance, which can meet the needs of large-scale intelligent storage center. Among them, the upper translation module of the double layer suspended cable-driven parallel robot has good stability and can provide accurate translation displacement. However, due to the different elastic deformation of the cable during the movement of the translational module, the pose error of the translational module platform is caused, which affects the normal operation of the lifting module. This problem can be solved by the follow-up force control strategy. Due to the long-distance displacement of goods provided by the lower lifting module of the double layer suspended cable-driven parallel robot, the vibration of the loading platform is difficult to avoid. However, appropriate control strategy can meet the requirements of keeping the vibration in a controllable range.
References
Setiawan, Y.D., Nguyen, T.H., Pratama, P.S., Kim, H.K., Kim, S.B.: Path tracking controller design of four wheel independent steering automatic guided vehicle. Int. J. Control Autom. Syst. 14(6), 1550–1560 (2016). https://doi.org/10.1007/s12555-015-0216-7
Zou, W., Pan, Q., Tasgetiren, M.F.: An effective discrete artificial bee colony algorithm for scheduling an automatic-guided-vehicle in a linear manufacturing workshop. IEEE Access 99, 1–1 (2020)
Olmi, R., Secchi, C., Fantuzzi, C.: Coordination of industrial AGVs. Int. J. Veh. Auton. Syst. 9(1/2), 5–25 (2011)
Izard, J.B., et al.: A Reconfigurable Robot for Cable-Driven Parallel Robotic and Industrial Scenario Proofing (2012)
Seriani, S., Gallina, P., Wedler, A.: A modular cable robot for inspection and light manipulation on celestial bodies. Acta Astronaut. 123, 145–153 (2016)
Saber, O.: A spatial translational cable robot. J. Mech. Robot. Trans. Asme (2015)
Torres-Mendez, S.J., et al.: Analytical workspace delineation of a translational underconstrained cable-based robot. In: 2017 International Conference on Electronics, Communications and Computers (CONIELECOMP) IEEE (2017)
Alikhani, A., et al.: Design of a large-scale cable-driven robot with translational motion. Robot. Comput. Int. Manuf. 27(2), 357–366 (2011)
Thuan, et al.: Analysis and control of vibration of cables in a high-rise elevator under earthquake excitation. Earthquake Eng. Eng. Vibr. 18(02), 214–227 (2019)
Jing-Wei, L.I., et al.: Horizontal vibration of elevator car based on experimental system. J. Mech. Electr. Eng. (2019)
Ma, Y., et al.: Pattern recognition of rigid hoist guides based on support vector machine. Adv. Mech. Eng. 10(12) (2018)
Ma, Y., Xiao, X.: Dynamic analyses of hoisting cables in a multi-cable friction mine hoist and determination of pcabler hoisting parameters. J. Vibroengineering 18(5), 2801–2817 (2016)
Zi-Gui, L.I., Wang, Z.Y., Ji-Zheng, L.V.: Analysis and calculation of emergency braking antiskid check of multiple-cable friction mine hoist. Coal Mine Mach. (2006)
Dagalakis, N.G., et al.: Stiffness study of a parallel link robot crane for shipbuilding applications. J. Offshore Mech. Arct. Eng. 111(3), 183 (1989)
Diao, X., Ou, M.: Vibration analysis of cable-driven parallel manipulators. Multibody Sys.Dyn. 21(4), 347–360 (2009)
Acknowledgments
Grateful acknowledgement is given to the National Natural Science Foundation of China with Grant No. 52075293, Natural Science Foundation of Shandong Province with Grant No. ZR2019MEE019 and the Fundamental Research Funds for the Central University with Grant No. 2019ZRJC006.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Wang, Y., Yu, F., Li, Q., Chen, Y. (2021). Configuration Selection and Vibration Analysis of Double Layer Suspended Cable-Driven Parallel Robot for Intelligent Storage System. In: Liu, XJ., Nie, Z., Yu, J., Xie, F., Song, R. (eds) Intelligent Robotics and Applications. ICIRA 2021. Lecture Notes in Computer Science(), vol 13013. Springer, Cham. https://doi.org/10.1007/978-3-030-89095-7_54
Download citation
DOI: https://doi.org/10.1007/978-3-030-89095-7_54
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-89094-0
Online ISBN: 978-3-030-89095-7
eBook Packages: Computer ScienceComputer Science (R0)