
Abstract
The friction of runway pavement is critical for the safety of aircraft landing and movement on the runway. Tire hydroplaning may lead the aircraft to move off the runway and hinder the safe landing during wet weather conditions. Grooving on the runway is one way to develop frictional braking resistance and diminish hydroplaning's potential risk by improving runway surface drainage capacity during damp weather. According to the Federal Aviation Administration (FAA), groove construction must follow specific dimensions to maintain skid-resistant airport pavement surfaces. However, the groove area can be reduced for several reasons, and regrooving is essential if 40% of the runway groove of a substantial length decreased to 50% of its original dimension. Grooves initiate different potential distress mechanisms that are not found in an ungrooved pavement surface. Groove closure in different airports with hot weather is a frequent and prominent form of distress that substantially declines the grooves’ effectiveness. Moreover, the degree of the declination of groove dimensions has not been quantified in a theoretical method. This paper discussed the current technique and importance of runway grooving. In addition to this, this paper reviews different potential distress mechanisms and issues related to groove deterioration. Finally, a brief of a predictive modeling requirement is illustrated, which is significant for the authority concern for maintenance and reinstate the grooving in the runway for friction development.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Pavement friction is a vital factor that administers the safe takeoff and landing of aircraft on runways. Runway conditions become worsen during wet weather by declining skid resistance diminishes significantly and responsible for runway expedition accidents [1].
Netherland Transport Safety Institute studied the overrun and veer-off accident factors and discovered that wet runways were vital components in both types of mishaps during landings and takeoff in Europe and worldwide. The outcome of the study revealed that wet runways caused about 40% of all landing overrun accidents in Europe and 60% worldwide. Hence, maintaining a required level of friction in all weather conditions has an immense consequence in the arena of airport pavement management. With the passage of time, research unveiled that some insightful measures are needed to accelerate the aircraft braking on the asphalt surface, especially in wet weather. Currently, one of the methods adopted worldwide is introducing transverse grooves on runway pavements to ensure adequate friction, especially during wet weather conditions [2].
NASA (National Aeronautics and Space Administration) studied first about grooves and introduced them at the landing tracks in 1962. Both NASA and FAA executed consecutive investigations to evaluate runway grooves’ impacts and performance in hydroplaning aircraft tire braking. The findings reveal that grooving enhances runway surface drainage and thus declines hydroplaning risk and simultaneously improves aircraft braking capability and maneuvering the aircraft on the runway in wet weather conditions [2].
Grooves provide an exit of entrapped water from between aircraft tires and the pavement surface, which improve frictional braking resistance and mitigate hydroplaning's potential risk [1, 3]. Considering the advantage of hydroplaning and enhanced skid resistance of grooved runways over ungrooved ones, FAA (Federal Aviation Administration) recommended in Advisory Circular AC 150/5320-12C that all runways serve turbojet aircraft should install a standard saw-cut square groove [4]. However, several factors need to be considered before grooving a runway, for example, extreme hot or cold climates that are not appropriate for grooving. Despite some shortcomings, runways are deploying grooving as the most common method utilized to develop aircraft braking performance, especially on the wet asphalt runways [3].
Groove closure depends on various factors such as hot environments, aircraft speed, wheel loads magnitude, number of passing, and aircraft movements parallel to the grooves. The groove’s familiar distresses are frequent rubber contamination, groove depth decrease due to surface erosion, edge break, and groove closure over time that were experienced in several international airports [3]. According to FAA's AC 150/5320-12C guidance, airport authorities should take immediate actions to reinstate the groove if 40% of the grooves in a certain length of the runway lost their dimension equal to or more than 50% from the original measurement [4]. Groove closure in different airports runway pavement is a common incident and a prominent form of distress. Groove closure definitely leads to a decline in the grooves’ effectiveness, but the scale of the reduction of groove dimensions has not been quantified theoretically [5].
Condition prediction models are utilized to conduct analysis and forecasting the condition that is vital for maintenance and rehabilitation (M&R), budget planning, inspection scheduling, and work planning [6]. Condition prediction models are essential in a pavement management system. Condition prediction models mimic the function similar to that of a car engine [6].
This paper demonstrates an investigative review on specific aspects of pavement condition prediction modeling and techniques for developing prediction models to configure different models.
Wang and Larkin [7] discussed and evaluated the groove shape changes (Depth, width, and area) under a long-term loading period between July 2014 and June 2016 in National Airport Pavement Test Facility (NAPTF), where a series of full-scale tests of airport pavement grooves on flexible pavements were conducted to evaluate pavement groove's operational performance [7].
This paper exposes a brief of groove closure prediction modeling based on the NAPTF investigation outcome by Wang and Larkin [7]. GeneXProTools 5.0 software was implemented to generate the genetic programming (GP) model, including wheel pass number, load intensity, pavement layer thickness, and temperature as input parameters.
The paper renders useful information of modeling perception, variables selection, and a brief outcome of groove closure modeling derived from different input parameters. The generated model provides information on reducing groove areas to the airport runway pavement personnel and drawing attention to the gradual declination of surface friction. Finally, the groove closure prediction model significantly leads to timely planning and implementation of maintenance work.
2 Research Objectives
The objectives for performing the study are as follows:
-
1. Describes the significance of runway grooving, including current techniques and standards of groove installation.
-
2.Discuss possible groove distresses, relevant factors, and failure mechanisms.
-
3. Reviews various prospective prediction modeling tools.
-
4.A brief prediction model of groove area deterioration using GeneXProTools 5.0 software.
The model helps to predict the runway grooves’ operational performance and associated financial and maintenance programs to the airport authority.
3 Runway Friction, Grooving Techniques, and Distresses
3.1 Runway Friction Deterioration and Resurgence
Runway friction is the critical element that a runway should have for aircraft's safe operation on runways. However, this friction can be decreased with time due to mechanical wear and polishing action by aircraft tires during rolling or braking and rubber deposition on the surface. These effects are connected with the volume and type of aircraft traffic. Moreover, variation in local weather conditions, type of pavement (HMA or PCC), type of materials used in the preliminary construction, and airport maintenance practices also persuade the skid resistance of runway pavement [4].
Furthermore, friction loss can be occurred due to pavement structural failures, such as rutting, cracking, raveling, joint failure, and settling. Besides, deposition of rubber, including other contaminants, such as oil spillage, dust particles, jet fuel, water, snow, ice, and slush, can trigger friction loss on runway pavement surfaces [4].
Runway grooving is an exceptional technique that now becomes admired to enhance aircraft braking on wet asphalt-surfaced runways. Open Graded Friction Course is useful for surface water drainage improvement but is turned blocked by debris. Conversely, Stone Mastic Asphalt is an open-graded mix that expresses improved surface texture without the risk of congestion or closure. Prior to the grooving, coarse asphalt mixes containing 20 mm aggregates were used to achieve better surface textures. Furthermore, Sprayed or ‘chip’ sealing delivers significant surface texture and is commonly implemented in regional and remote airports [3, 5].
3.2 Runway Grooving Techniques and Requirements
In the runway, grooving has proven a suitable technique for providing sufficient skid resistance and avoiding hydroplaning during rain [4]. Approximately 40% in Europe and 60% of global accidents are closely connected to landing overrun. Hence, runways are required to be grooved to ensure satisfactory friction levels under all weather conditions [1].
FAA advisory circular AC-150/5320-12C [4] suggests that runways serving or are expected to serve turbojets shall be grooved. Existing runways should be considered for grooving considering annual rainfall, historical records related to hydroplaning and associated accidents, runway length, quality of surface texture under dry or wet conditions, improper seal coating, inadequate friction, and runway pavements strength. Moreover, Transverse and longitudinal grades, any drop-offs at the runway ends due to topographical constraints, and crosswind effects must be taken into account. A reconnaissance survey containing bumps, bad or faulted joints, depressions, cracks, and the runway's structural conditions shall be performed as specified in ACs 150/5320–6 and 150/5370–10 before grooving [4].
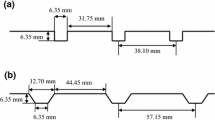
FAA introduced a standard and groove configuration based on the tests and research. Present FAA standard square groove dimensions are depth 6 mm (1/4 in), width 6 mm (1/4 in), and 38 mm (1 ½ in.) center to center spacing, as depicted in Fig. 1 [4].

FAA standard groove design section (Adapted from [4])
Moreover, a minimum of 90% of the grooves should have a depth of at least 3/16 in. (5 mm), at least 60% of the grooves should have depth no less than 1/4 in. (6 mm), and 10% of the grooves may not surpass a depth of 5/16 in. (8 mm) as per FAA advisory circular AC-150/5370-10G [8]. Hence, ensuring groove depth for adequate pavement friction during operation is critical [1]. However, groove depths can vary in construction and after the construction due to deterioration in different ways [9].
In General, grooves can be installed into the asphalt surface 4–8 weeks after the surface is constructed [3]. Grooves are normally fabricated across the runway surface, transversely to the runway length and perpendicular towards the runway's centre line [7]. Since the saw cutting techniques develop adequately, a new trapezoidal-shaped groove was proposed by Patterson [10].
Grooves are generally fabricated across the runway surface, transversely to the runway length and perpendicular towards the centerline of the runway [1].
Since the saw cutting techniques improve satisfactorily, a new trapezoidal-shaped groove was proposed by Patterson [10] to evaluate with the standard rectangular groove [1]. The trapezoidal groove dimensions consist 1/2 in. (12.5 mm) at the top, 1/4 in. (6 mm) at the bottom, and distributed 2 1/4 in. (56 mm) center to center as shown in Fig. 2 [10]. Newly designed trapezoidal grooves are shown in Fig. 2.

Groove configurations of trapezoidal shapes (Adapted from [10])
Recently, FAA constructed rectangular and trapezoidal grooves in both rigid pavement and asphalt pavement at the National Airport Pavement Test Facility (NAPTF) areas to compare the performance of both grooves. The results demonstrated that the trapezoidal-shaped pavement groove design rendered some advantages over the current FAA standard square grooves that include better water evacuation, enhanced resistance to rubber contamination, integrity, and improved longevity [2].
3.3 Runway Groove Distress and Failure Mechanism
Grooves tend to produce various potential distress mechanisms that are not seen in an ungrooved pavement surface.
Runway Groove Distress. Some familiar distresses related to grooving are groove closure, rubber contamination, edge break, and groove depth diminishing due to surface erosion [3].
Groove Closure. Groove closure is an outstanding form of groove distress, which is quite common in hot environments and decreases its efficiency. In summer, it has successive high pavement temperatures, particularly in the asphalts made with relatively soft binders. It can also observe in places where aircraft travel slowly and parallel movement to the grooves, mainly in runway entry and exits. Moreover, comparatively new asphalt surfaces are more susceptible to groove closure along with high wheel loads. Nonetheless, the degree of groove area declination has not been computed in a theoretical process. However, friction testing is purposeful to measure the effect of partial groove closure [3].
Groove closure substantially reduces the effective volume of grooves and thus affects frictional performances of runways [11]. According to FAA’s AC 150/5320-12C, if 40% of the grooves in the runway lost its shape equal to or less than 3 mm in depth and/or width in a consecutive length of 457 m, the efficiency of grooves for mitigating hydroplaning has been reduced significantly. Hence, the airport authority should reinstate the groove shape without delay [4]. Sometimes, re-sawing of closed grooves may create foreign object debris (FOD) hazards by breaking off weakly supported asphalt. This problem can be resolved by deploying a new asphalt overlay around 60 mm and grooving it once curing is completed [3].
Rubber Deposition. Rubber deposition can take place in touchdown zones in the runways, whether it is grooved or ungrooved. NASA investigated that transversely grooved runway pavements develop fewer rubber deposits during aircraft touchdown actions than non-grooved pavements. However, grooved pavements need to remove rubber contamination frequently to maintain groove effectiveness by ensuring friction [3].
Erosion. Groove depth can be decreased due to the fine particles’ erosion from between the larger aggregates and settled inside the groove. Fortunately, this displacement of fines can improve the surface's general texture, which mitigates the surface's general texture effectiveness. Erosion of Asphalt surface primarily introduced by jet blast. Generally, aged binder promotes the dislocation of fine aggregate particles and binder from the surface. The rate of erosion can be increased for some reason, such as using unsound aggregates in asphalt production, using a specific binder that is more prone to rapid aging, improper aggregate gradation in the asphalt manufacturer, and unfavorable environmental conditions [3].
Edge Breaking. Edge breaking in the hot mixed asphalt (HMA) runway groove was caused due to the bitumen binder's cohesive failures rather than the aggregate-binder interface's adhesive failures. Hence, a high-temperature resistant binder is required to ensure cohesion and stiffness of pavement at high temperatures. On the contrary, this will reduce the aggregate loss associated with edge breaking and finally prevent groove closure [3].
Other Distress. Other distress, like cracking, spalling, wearing, and erosion, are innate to HMA pavements and can be observed in grooved and ungrooved asphalt surfaces. Furthermore, the movement of asphalt caused by binder flow may lead to a wavy groove shape. Most groove failures ended up with grove closure due to plastic flow and deeply concerned with asphalt characteristics containing binder and aggregates [12].
Mechanism of Groove Failure. Groove failure is closely connected with plastic flow resulting from the viscous flow, which is akin to the rutting mechanism in an ungrooved asphalt surface. Microscopic analysis of asphalt recommended that cohesive (or stiffness) shortage is more important than adhesive failure. Groove closure is deeply related to binder characteristics: temperature, loading time, and aging [13, 14]. Edge breaking is caused by the horizontal stresses induced by aircraft tires. Moreover, this recurring stress application leads to edge failure on the unsupported groove edges. The examination exposed that this edge beak is a cohesive failure and depends on the binder's viscosity (stiffness). Furthermore, asphalt becomes more brittle, and this groove edge breakage mechanism could be more serious in cold weather conditions than in hot environments. Also, age-induced hardening, freeze–thaw cycling, moisture effects, and chemicals’ de-icing could enlarge the edge breakage [12].
4 Pavement Performance Prediction Models
Predicting pavement future performance and deterioration process is significant to understand among the concerned authorities. The emphasis is given to the precise estimation of pavement performance concerning time. Hence, M&R actions under PMS have become more dependent on this prediction of pavement performance, and necessity enhances than before.
Pavement prediction models are inevitable in the current pavement management system and play a vital role in many critical management decisions.
There is a various decision-making tool for adopting modeling such as dynamic programming, neural network, decision support system, the Genetic Algorithm, and System dynamic modeling [15], which have been exercised broadly in pavement management [16, 17]. Pavement performance prediction models can be categorized into three different types: empirical models, mechanistic models, and empirical- mechanistic models. Pavement performance prediction models are two types by some others which are deterministic and probabilistic [18].
The deterministic models predict every single number related to the level of distress or whatever parameter that needs to measure for describing the projected condition for a pavement's remaining life. Hence, it is considered an evaluation of pavement deterioration over time in the entire prediction process. Conversely, a probabilistic model predicts a distribution of such events that demonstrates different probable future conditions since the outcomes developed stochastically. In this process, the deterioration prediction is treated to some extent as ambiguous and does not reflect accurate predictions [18].
One of the limitations of the current deterioration prediction models is that they do not investigate the transition time of pavement deterioration and transition probabilities from one state condition to the next. Hence, the model developed excluding the transition probabilities between pavement conditions states is construct a deterministic model where the probabilistic characteristics of the pavement deterioration process remain absent [19].
4.1 Deterministic Models
Deterministic models are broadly used, prediction models. Two types of prediction models that include structural and functional performance prediction models mainly depend on the prediction type that needs to be determined [18].
Structural Performance Models. These models are utilized to predict all kinds of individual pavement distresses as a natural feature of pavement behavior. The prediction models can be empirical or mechanistic-empirical. Empirical models are based on experience or experimental results derived from several observations to achieve the correlation between the input variables and outcomes [20]. In the mechanistic-empirical model, the materials responses or accumulated deformation is regulated as per the experimental field data, which is why it is termed a mechanistic-empirical model.
These models indeed depend on the properties of the materials of pavement structure and the maximum allowable load, including the number of cycles of load applications before rupture occurs. Various distress such as fatigue cracking, predetermined rutting, and others are defined as failure criteria. Recently, materials characteristics, for instance, deflection calculation and future projected traffic, are considered for the prediction of the remaining structural life of the pavement and thus helps the agencies for future M&R planning and actions [18]. This type of prediction model has been developed for different pavement and utilized in several organizations such as the Asphalt Institute, the Portland Cement Association, and Shell International Petroleum company by the concerned engineers. Moreover, this structural prediction model is incorporated in APMS and associated software like PAVER and IAPMS [18].
Functional Performance Models. This type of model is frequently practiced in the PMS in highways that are utilized to determine the pavement surface friction (skid resistance) or to hydroplane potential during wet weather and present serviceability index (PSI). These models can be empirical or mechanistic types similar to the structural model. PMS of Denmark, the PARS system of the province of Ontario, and NCR models developed under this category [18].
In APMS, the only functional performance prediction models are utilized for PCI prediction models. The majority of them are introduced by the PAVER system but used by others as well, like AIRPAV and IAPMS. Nonetheless, in contrast to their highway counterparts, these models are empirical. Their analysis is not based upon the prediction of pavement deterioration related to loading and climate effect on the surface conditions, and rather they developed a correlation between PCI and other available data demonstrating the pavement structure. As a result, the prediction models that rely on previously observed data need to be calibrated through the procedure of statistical analysis [18].
In the beginning, the prediction under PAVER was executed by a straight-line extrapolation utilizing only the previous two PCI values. The projected PCI values were established by the straight line hitting these two PCI points plotted on a PCI vs. time graph. It is to be noted that no other variables were taken into consideration that way. It was too simple and comparative inaccurate due to a lack of modern techniques.
The most popular statistical analysis technique for prediction modeling is multiple regression analysis, which has been utilized in numerous situations to generate such models. Models evolved from this approach indicate that the projected PCI values are related to various explanatory variables such as pavement structure, time, load, and repetition of traffic to express the predictive mathematical equation.
PAVER software for pavement management was developed using such equations for both the flexible and rigid pavement by USACE, analyzing a substantial set of data collected from different US Air Force bases. The prediction performance was found satisfactory for the higher PCI values but declined significantly for the pavement surfaces with PCI less than 65 for rigid or 50 for flexible pavements correspondingly.
It was noticed that several universal models that were generated using the regional data not performed satisfactorily for the local ones. The model incorporated with the specific local climate, soil subgrade, and materials properties render comparatively better performance. Hence local models are more advantageous than universal and should be refined and updated as local and new information is accessible [18].
Regression analysis. Regression analysis is a handy tool for the development of a prediction model with due care. The equation derived from the modeling should be significant and useful in respect to the selected variables and not prioritized the best fit the available data only. This is inevitable to achieve a realistic model with a high level of confidence in its prediction. A large amount of data is required to get a precise model. However, accurate predictions may not be attained due to complex pavement characteristics. A substantial amount of data is utilized to develop the model. The regression models are defined within a range of data by which it is developed and hence cannot be fabricated extending far from the range. That is why the PAVER models are not precise for the PCI value less than 65 ± 50, and the predictive range was constrained to the upper part of the PCI scale [18].
4.2 Probabilistic Models
Probabilistic prediction models are three different types including, survivor curves and simulation models and Markovian models. In recent time Markovian models gain more recognition and acceptance as an effective prediction technique in the arena of the highway are now deploying towards airport pavement. The concept behind this type of model is that the pavement deterioration process is not deterministic in nature but uncertain. Hence, a probabilistic prediction model should depict the process in a stochastic way rather than assuming deterministic behavior the wrong way. Moreover, the Markovian probabilistic approach offers more rational models considering a different aspect of pavement characteristics [18]. Different methodologies have been generated to develop probabilistic pavement performance models with high prediction capabilities. Nonetheless, insufficient historical data generated preventive maintenance (PM) model often reveal erroneously predicted pavement condition and leads to non-optimum maintenance and rehabilitation (M&R) resolution [21].
Survivor Curves. Survivor curves are utilized by different agencies for planning, finding M&R alternatives on pavement networks. Authorities adopted previous construction, maintenance, and rehabilitation data to generate the curves containing probability vs. time. Generally, the probability declines with time from 1.0 to 0.0, which indicates serviceable pavement conditions without major maintenance or rehabilitation works [18].
Simulation Models. Simulation models are based on computer programs followed by mathematical models of pavement response against load and pavement behavior for a certain period. Different input parameters such as pavement layer interfaces and bitumen content are considered stochastic, and the model response is also stochastic accordingly. These programs can predict future pavement conditions. This modeling requires suitable computer resources and comprehensive repetitive calculations, thus not pragmatic in the planning framework [18].
Markovian Models. This type of model predicts pavements’ functional condition and not aiming to analyze the deterioration process instead directs the model with readily available information regarding pavement characteristics.
The Markovian prediction model articulates the state by which it represents a pavement section's condition at any given time. The condition states could be designated with respect to the PCI of that sections. For instance, PCI ranging 100 ± 91 would be treated in state 1, and PCI ranges 81 to 90 would be considered in state 2. The pavement deterioration progression with time is modeled by shifting from one condition state to another with time advancement. This deterioration process's nature is probabilistic, and probabilities govern the evolution of pavement conditions in association with the different possible transitions. Each transition probability demonstrates the chances that a pavement section in the current condition will end up in a specific condition after a certain period. These probabilities are articulated in a matrix form (Markovian transition matrix), representing pavement sections with similar properties such as construction type, age, and traffic condition [18]. Under this approach, the transition probability matrices are derived from either engineering experience or analysis of historical pavement condition data. The analysis is done using several techniques, for instance, regression analysis or non-linear programming. Markov models were first implemented in pavement management under the Arizona highway PMS in 1980. Afterward, this prediction model was used in the airport pavement management. There are different benefits to adopting Markovian prediction models. These models offer better predictive accuracy than their counterparts when properly generated. A comparative study utilizing four PCI prediction models was carried out by Cook and Kazakov (1987), where two models were regression models (deterministic), and the other two were Markovian models. The average errors were observed higher in regression models than the Markovian models for the predicted PCI relative to the actual PCI values. Nonetheless, important historical data files are usually required to generate such Markovian models than with the regression models.
Another advantage of Markovian models is that they can make predictions far from the limit of the data and deliver typical outline deterioration conditions with respect to age, which regression models cannot give direct assurance. Consequently, these models can be integrated into most of the PMSs for the planning process [18].
4.3 System Dynamic Study
System dynamics is a standard method of modeling that identifies the correlation of a certain parameter with other variables and indicates the changes with respect to time. It must contain a flowchart or a conceptual model that expresses the entire process of the model. In the conceptual model, storages and flows are like building blocks. Storages act as accumulators in the system and facilitate describing the circumstances of the system. Conversely, flows specify the movement rate of possessions in and out of the system. Values and relationships among each storage and flow are designated in the form of constants and represented through equations or data tables. Once a system dynamics model is generated, it explains the cause-effect relations among the variables and maintains continuous interactions between its parameters [15].
4.4 Artificial Neural Network (ANN)
Artificial Neural Network (ANN) has been recognized as a powerful computational tool to resolve numerous engineering problems over many years. American Association of State Highway and Highway and Transportation Officials (AASHTO) utilized ANN to develop a new Mechanistic Empirical Pavement Design Guide (MEPDG) [22]. ANN is motivated by the biological neural network where the neuron consists of soma, dendrite, synapse, and axon and nucleus creates the input process. Dendrite is a tree-like fiber that acts as a receptor to receive the signal or input. Axon is the long single fiber cell that transfers the signal from a synapse to another recipient end of the neutron's synapse. The artificial neural network was developed by mimicking the basic structure and working procedure, including some significant attributes related to computing the model with pattern recognition tasks [23].
ANN is a plotting of input into the preferred outcome. It contains weighted inputs and transfers function into the output. A modest feed-forward neural network is generally adopted in ANN. The input at the first layer is supplied into the interconnecting layer called hidden layers, supports by the transfer function, which does not affect the feed-forward characteristics in the neural network and ultimately the output layer. The ANN model's performance is usually assessed by a different error, such as Mean Square Error (MSE) [23].
4.5 Genetic Programming (GP)
Gene expression programming (GEP) is like genetic algorithms (GAs) and genetic programming (GP), that customize populations of individuals utilizing genetic algorithm and decide as per fitness, and expresses genetic disparity using one or more genetic operators [24]. It is an emerging program that flourished from the Genetic Algorithm (GA). GP is an evolutionary algorithm-based system persuaded by biological evolution where independent input parameters are engaged to resolve the mathematical assignment, and an output parameter is generated utilizing linear or non-linear equations [25]. Basically, it obeys the Darwinian principle of survival of fitness, where a number of solution candidates are set against a problem similar to the GA [23].
The GP’s fundamental genetic operators mimic GA, for instance, mutation, reproduction, and crossover, except for the expression tree or syntax tree representing the GP rather than conventional codes. Furthermore, it can be uttered in linear mathematical formulae. In general, the leading operators in GP are Mutation and Crossover, and the preliminary population is randomly generated through individual computer programs. The selection method of individuals depends on their fitness for crossover.
In GP, the terminals are usually indicated as the input variables (i.e., x and denoted by d0, d1, etc.) and constants (symbolized by c0, c1, etc.) in the expression tree (ET). Likewise, the functions are interpreted through the internal nodes, such as different arithmetic functions (i.e., + , −, *, /, Sqrt), certain mathematical operations (i.e., ln, sin, cos, exp), including different conditional operations like if, greater, equal, then, and else. This arrangement of terminals and functions is determined as an intrinsic set in GP [23].
5 Predictive Modelling by Genetic Programming (GP)
5.1 Modeling Procedure
In this paper, GeneXProTools 5.0 was applied to generate the GP model. The software was employed to develop a relationship between the groove areas changing with several input parameters. GeneXproTools is a potent software package that can be utilized to execute a symbolic regression analysis based on Gene Expression Programming (GEP) [24, 26]. GeneXProTools is a simple to run comprising effective tool within the GEP technique and demonstrates the mathematical equation explaining the combined model to the users, including the intrinsic merits of Genetic Programming and Genetic Algorithms [27].
Generally, the task of linking input parameters is supported with a variety of functions in GP. This modeling utilized four basic operators (+, −, × , /) and some other functions, including × 2, √3, ln, and exp. Finally, a GP-based model delivered a mathematical equation evolved from the expression trees (ETs) that contain several genes denoted as sub-ETs. Every gene possesses a fixed length and constitutes a head that includes functions (for example, +, –, x2, and ln) and terminals (representing the input variables denoted by d), and a tail comprises only terminals. This head size indicates the complexity or maximum size of each sub-ET branch in the model. Though there is no standard way to run the model, the practice runs and monitors the results and adjusts the number of sub-ETs and chromosomes until attaining optimum accuracy. Distinct options of functions and original & derived variables and constants are developed in the terminals to model the data [28].
A model may not utilize the allocated maximum number of chromosomes and head sizes. A linking function is inevitable in linking the sub-ETs in the model when the number of genes becomes more than one. The addition function is deployed as a liking function in this research to link the sub-ETs.
In general, the experimental datasets are divided into training and validation parts. Modeling was continued until the coefficient of determination (R2) become maximum for both training and validating phases. However, it is crucial to have a model trained and validated with about the same accuracy [23].
5.2 Importance of the Input Variables
The input variables considered for this modeling are Wheel pass number (n), Wheel load (L), Subbase Thickness (Tsb), Asphalt Thickness (Ta), and Maximum temperature (tmax), respectively.
Emery [13, 14] investigated the deterioration of grooves of asphalt on Australian runways and suggested that slow movement and heavy aircraft were accountable for most groove closure in Australia [13, 14]. Pavement layer thickness variations also create the differences in pavement performance substantially. Subgrade stiffness, granular subbase thickness, and asphalt thickness are the other parameters that affect the variability of anticipated deformation performance [29].
Groove failure and associated closure are considerably connected to asphalt rheological properties and successive plastic flow of the HMA. Aircraft loading in higher temperatures provides plastic flow and dislocated aggregates along the wheel tracks [12]. Asphalt pavements exposed to temperature variations daily or seasonally are more susceptible to fatigue damage than at a specific temperature [30]. As a result, groove closures are frequent in hot environments [3].
The input variables might significantly influence the output, and the correlations between the input variables and the output results could be meaningful for determining the groove area. However, insignificant variables could lessen the accuracy and overall performance of the model.
5.3 Data Collection, Input Variable, and Model Configuration
The wheel load, pass number, Subbase, and asphalt thickness data were extracted from asphalt pavement groove life and effect of aircraft traffic loading examined at FAA National Airport Pavement Test Facility (NAPTF) by [7]. The temperature during the loading period was taken from the website [31].
The input variables and response variables are denoted by X and Y. The inputs in this model were Wheel pass number (d0), load (d1), Subbase Thickness (d2), Asphalt Thickness (d3), and Maximum temperature (d4) correspondingly, and the response variable and output parameter were Groove Cross-Sectional Area (Y).
The experimental dataset (a total number of 81) was sub-divided into training (62 Nos, 76.54%) and validation (19 Nos, 23.46%). This GP model employed fifteen functions, including addition, subtraction, division, multiplication, ln, and exp. The addition was considered as the linking function, whereas the Root Mean Squared Error (RMSE) was utilized as the fitness function. The configuration of input settings and symbolic function set to develop the combined GP model in GeneXProTools: 5 are demonstrated in Tables 1 and 2.
6 Results and Discussions
This GP model's results were exposed through the expression tree (ET) associated with the gene is demonstrated in Fig. 3. Three sub-expression trees (ET’s) with addition as a linking function were attained. In the ET’s d0, d1, d2, d3, and d4 stands for Wheel pass number (n), Wheel load(L), Subbase Thickness (Tsb), Asphalt Thickness (Ta), and Maximum temperature (tmax), respectively. The value of constant c3 in sub-ET 1 is 6.410, c2 in sub-ET 2 is 0.90308. Likewise, the constant of c2, c6, and c7 in sub-ET 3 accounts for 6.625, 7.364, and -311.575, correspondingly.

GEP Expression Tree (ET)
The ultimate simplified equation articulates the Groove Cross-Sectional Area (fga) as indicates in Eq. (1), derived from these expression trees.
The numbers of chromosomes and sub-ETs as genes are two important parameters that play a vital role in the preciseness of the model. However, a limited number of chromosomes and genes could lead to inferior accuracy and develop a complex and ineffective equation. Hence, there should be an optimum number of these essential parameters for any specific model. Input parameters were employed as observed in the prediction equation, which specifies the importance and relevance of all the input parameters into the output. The model outcome finally contributes to the precise prediction of the groove closure.
Other parameters and outcomes of the model are presented in Table 3. Maximum 13 chromosomes and 6 heads were used in sub-ET's. The model achieved an excellent fitness of 998.42 for training and 997.16 for validation phases in the maximum fitness scale of 1000. The coefficient of determination (R2) for training and validation phases was obtained at a rate of 0.931 and 0.946, respectively. A minor error such as RMSE demonstrates that the GP model has been trained well, and it can forecast the groove areas with a high degree of accuracy and reliability. In addition to this, Table 4 delivers some statistical parameters of the variables.
Figure 4 depicted the experimental data in comparison with the predicted results for both the training and validation phases as determined in the GP model. These scatter plots expressed the correlation between input variables and derived variables.

Predicted and experimental Groove X-Sectional Area (Training & Validation Phase)
The target sorted fitting curves articulates that the model followed the targeted values quite closely for both the training and validation phases, as illustrated in Figs. 5 and 6, respectively.

Target sorted fitting of data (Training phase)

Target sorted fitting of data (Validation phase)
The results stated that the GP model could predict the groove area deterioration near the experimental results. Additionally, this GP model can be an effective and reliable model for groove closure prediction with a high degree of accuracy.
7 Conclusions
This paper reviewed detail about runway grooving's contemporary practice, including potential distress mechanisms and factors involved with groove deterioration. A later different perspective of prediction modeling has been demonstrated. Finally, a GP Model has been developed successfully.
The coefficient of determination (R2) obtained for training and validation are 0.931 and 0.945, correspondingly. The results indicate that the generated model fitted with the experimental data reasonably well, an expression of the prediction models’ reliability.
It was tricky to predict the groove's service length on the runway in a theoretical process before. The prediction equation generated through this GP model renders useful information for the prediction of groove area deterioration derived from several input factors, including loads, pass number, the thickness of sub-base and Asphalt layer, and temperature. Airport authorities can refix and fit the model depending on their specific construction history, loading characteristics, and frequency. This will deliver a general prediction view of their groove life and timeframe of functional condition. Moreover, the model will shorten the evaluation time for groove area changes in a similar situation and calculate the rate of deterioration and the percent of groove closure regarding aircraft movement realistically.
Moreover, the authority can plan its budget for future repair and maintenance activities, including groove reinstallation to reinstate surface friction. However, some other factors like rubber contamination on runway grooves, aircraft wheel speed, and variation in materials configuration in the runway pavement layer, including fundamental characteristics like resilient modulus, could be considered for the modeling. More detailed examination facilities in the runway in operational conditions could provide realistic results and associated modeling.
Finally, this study has produced a deterioration model that will provide insight into the groove closure and groove life prediction for timely maintenance of runway pavements to ensure adequate surface friction.
References
Pasindu HR (2020) Analytical evaluation of impact of groove deterioration on runway frictional performance. Transp Res Procedia 48:3814–3823
Fwa TF, Pasindu HR, Ong GP, Zhang L (2014) Analytical evaluation of skid resistance performance of trapezoidal runway grooving. In Transportation research board 93th annual meeting, p 24
White G., Rodway B (2014) Distress and maintenance of grooved runway surfaces. Airfield Eng Maintenance Summit
Federal Aviation Administration (FAA) (1997) Measurement, construction and maintenance of skid-resistant airport pavement surfaces. FAA Advisory Circular 150/5320–12C, Washington DC
White, G.: Managing skid resistance and friction on asphalt runway surfaces. In World Conference on Pavement and Asset Management, Milan, Italy (2017).
Shahin MY (2007) Pavement management for airports, roads, and parking lots (2005). ISBN-10: 0–387–23464–0, ISBN-13, 978–0387, 2nd edn. Springer
Wang Q, Larkin A (2019) Asphalt pavement groove life analysis at the FAA national airport pavement test facility. In Airfield and highway pavements 2019: innovation and sustainability in highway and airfield pavement technology, Reston, VA: American Society of Civil Engineers, 418–426
Federal Aviation Administration (FAA) (2014) Standards for specifying construction of airports. FAA Advisory Circular 150/5370–10G, Washington DC
Washington DC Federal Aviation Administration (FAA) (2010) FAA grooving requirements. FAA worldwide technology transfer conference, New Jersey, USA
Patterson JW (2012) Evaluation of trapezoidal runway grooving. FAA-TC-TN12/7, Federal Aviation Administration, Washington, DC
White G (2018) State of the art: asphalt for airport pavement surfacing. Int J Pavement Res Technol 11(1):77–98
Apeagyei AK, Al-Qadi IL, Ozur H, Buttlar WG (2007) Performance of grooved bituminous runway pavement. Center Excel Airport Technol: Tech Rep 28:1–10
Emery SJ (2005) Asphalt on Australian airports. Australia asphalt paving association pavement industry conference, Surfers Paradise, Queensland
Emery SJ (2006) Bituminous surfacing for pavements on Australian airports. 24th Australia airports association convention, Hobart
Tarefder RA, Rahman MM (2016) Development of system dynamic approaches to airport pavements maintenance. J Transp Eng 142(8):04016027
Ansarilari Z, Golroo A (2020) Integrated airport pavement management using a hybrid approach of Markov Chain and supervised multi-objective genetic algorithms. Int J Pavement Eng 21(14):1864–1873. https://doi.org/10.1080/10298436.2019.1571208
de Moura IR, dos Santos Silva FJ, Costa LHG, Neto ED, Viana HRG (2020) Airport pavement evaluation systems for maintenance strategies development: a systematic literature review. Int J Pavement Res Technol 1–12
Gendreau M, Soriano P (1998) Airport pavement management systems: an appraisal of existing methodologies. Transp Res Part A: Policy Pract 32(3):197–214
Altarabsheh A, Altarabsheh R, Altarabsheh S, Asi I (2021) Prediction of pavement performance using multistate survival models. J Transp Eng Part B: Pavements 147(1):04020082
Pavementinteractive Homepage: Empirical Pavement Design retrieved from https://pavementinteractive.org/reference-desk/design/structural-design/empirical-pavement-design/. Last accessed 21 Jan 2021
Yamany MS, Abraham DM (2021) Hybrid approach to incorporate preventive maintenance effectiveness into probabilistic pavement performance models. J Transp Eng Part B: Pavements 147(1):04020077
Gopalakrishnan K, Ceylan H, Guclu A (2009) Airfield pavement deterioration assessment using stress-dependent neural network models. Struct Infrastruct Eng 5(6):487–496
Leong HY, Ong DEL, Sanjayan JG, Nazari A, Kueh SM (2018) Effects of significant variables on compressive strength of soil-fly ash geopolymer: variable analytical approach based on neural networks and genetic programming. J Mater Civ Eng 30(7):04018129
Ferreira C (2001) Gene expression programming: a new adaptive algorithm for solving problems. Complex Syst 13(2):87–129
Leong HY, Ong DEL, Sanjayan JG, Nazari A (2015) A genetic programming predictive model for parametric study of factors affecting strength of geopolymers. RSC Adv 5(104):85630–85639
Ferreira C (2006) Gene expression programming: mathematical modeling by an artificial intelligence. Germany, 2nd edn, Springer
Fernando AK, Shamseldin AY, Abrahart RJ (2009) Using gene expression programming to develop a combined runoff estimate model from conventional rainfall-runoff model outputs. In Proc 18th World IMACS congress and MODSIM09 international congress on modelling and simulation, 2377–2383
Gepsoft Homepage, https://www.gepsoft.com/tutorials/GettingStartedWithRegression.htm. Last accessed 26 Nov 2020
Valle PD, Thom N (2020) Pavement layer thickness variability evaluation and effect on performance life. Int J Pavement Eng 21(7):930–938. https://doi.org/10.1080/10298436.2018.1517873
Safaei F, Hintz C (2014) Investigation of the effect of temperature on asphalt binder fatigue. In International society for asphalt pavement conference, 1491–1500
TimeanddateHomepage, https://www.timeanddate.com/weather/@5101760/historic?month=6&year=2016. Last accessed 23 Nov 2020
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Miah, M., Oh, E., Chai, G., Bell, P. (2022). Runway Grooving Techniques and Exploratory Study of the Deterioration Model. In: Pasindu, H.R., Bandara, S., Mampearachchi, W.K., Fwa, T.F. (eds) Road and Airfield Pavement Technology. Lecture Notes in Civil Engineering, vol 193. Springer, Cham. https://doi.org/10.1007/978-3-030-87379-0_16
Download citation
DOI: https://doi.org/10.1007/978-3-030-87379-0_16
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-87378-3
Online ISBN: 978-3-030-87379-0
eBook Packages: EngineeringEngineering (R0)