
Abstract
A detailed review on various DC–DC and DC–AC converters used in electric vehicle (EV) and hybrid electric vehicle (HEV) is discussed in this chapter. Motor, inverter, DC–DC converter, and battery pack constitute an integral part of modern EV/HEV. In this chapter, an insight on various DC–DC (Chopper) and DC–AC (Inverter) converters used in EV and HEV are also presented. In order to appreciate the role of DC–DC converters in drives, a closed-loop speed control of a separately excited DC motor using PWM control was modeled and simulated using MATLAB/Simulink. The mathematical model for the motor was simulated and analyzed using MATLAB/Simulink using “Commonly Used Blocks” with appropriate step size. Various types of multilevel inverters used for drive applications were discussed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Air pollution and global warming are some of the major environmental issues caused to the use of conventional fossil fuel-powered vehicles. Tremendous efforts have been made in making the vehicles pollutant free. This can be performed by the use of vehicle electrification technologies, including EVs and HEVs based on the electricity produced from renewable energy sources. Battery EV or in general EV is known as “green vehicle or eco-friendly” vehicles as they have zero emission. The major drawback of such EVs is the range of distance that they can cover. To cover a large distance, larger capacities of batteries are used and those vehicles are called as HEVs. They cover a range of 500 km (TESLA mode) and need to be recharged later.
In modern-day EVs and HEVs, the role of drives and the application of power electronics (DC–DC and DC–AC) in drives is very significant. Different types of motors used in EV/HEV are permanent magnet brushless and switch reluctance motors [1]. The general requirements of the electric machine in the EV sector are (i) high-power density and high-torque density, (ii) low-torque ripple, (iii) high efficiency for wide torque and speed ranges, (iv) wide constant power-operating capability, (v) low cost and high reliability, (vi) low acoustic sound, (vii) high intermittent overload capability, and (viii) efficient working in harsh environment.
Figure 4.1 shows the general configuration of an EV and HEV. The two major power electronic units are DC–DC and DC–AC converters.

General configuration of EV/HEV
These converters can be classified as (i) unidirectional and (ii) Bidirectional. The loads to the unidirectional converters are sensors, utility, and safety equipment. The bidirectional converters are used for regenerative braking and battery charging and discharging. The input to this converter is fed from a battery source for boosting purposes.
In this chapter, a summary on various DC–DC and DC–AC converters used in EV and HEV is discussed. A mathematical model for constant speed control for a separately excited DC motor is developed and analyzed using MATLAB/Simulink. This simulation showed the importance of DC–DC converters in a drive unit. Various inverters used in EV and HEV were discussed and simulation of a three-level inverter was carried out using built-in blocks of Simulink.
2 Electrical and Thermal Modeling
In [2], the electrical and thermal modeling of an IDU (Integrated Drive Unit) in an electric SUV is presented. The drive unit consists of a permanent magnet synchronous motor (PMSM), inverter, and a transmission gearbox. For cooling purposes, a coolant is circulated through the inverter and PMSM.
The lumped model for the motor and inverter was developed using MATLAB/Simulink and the input to the model was supplied in the form of heat. The heat generated in the motor and its components was obtained from (Finite Element Analysis) FEA ANSYS Maxwell software tool. The IDC was modeled and simulated for GAC Aion LX SUV EV using the NEDC test cycle.
The drive cycle of an EV refers to the speed as a function of time. Drive cycles are produced by many countries to analyze the performance of EVs (Fuel consumption, CO2 emission, and Core temperature generated in the battery (Tc)).
The drive cycle of an EV refers to the speed as a function of time. Drive cycles are produced by many countries to analyze the performance of EVs (Fuel consumption, CO2 emission, and core temperature generated in the battery (Tc)).
In [3], a detailed study on the effect of fast discharge of a battery on Tc for the FTP75 drive cycle was analyzed. A DC motor of 230 V rating was selected to estimate Tc in terms of known surface (Ts) and ambient temperatures (Tamb) using MATLAB/Simulink. The drive cycle data were available in the software in m/s which was converted to power using necessary equations.
Three different IDC models were discussed in [4] viz., (a) linear model, (b) saturated model, and (c) saturated/spatial harmonics model. Among these models, the saturated model is the most accurate result resulting in large computation time [2]. Hence, linear and saturated models were considered for the prediction of torque, no-load speed, and torque-speed characteristics.
It was observed that the thermal resistances lumped parameter thermal network were constants. However, the speed-dependent components were rotor-stator air gap thermal and the rotor end space resistances. The high temperature was observed at the stator teeth, rotor, and winding because of their inner heat generation [2]. Simulations showed that the temperature at the stator teeth reached 120°C for motor speed ~12,000 rpm. This was due to the stator iron loss which is significant in the NEDC cycles [4].
A similar study on the internal temperature of a cell was studied and estimated using a Kalman filter in [2, 5]. A second-order thermal model was considered for estimating the internal temperature. It was shown that with the increase in current, the temperature drastically increased.
3 Power Electronics Intensive Solutions for HEVs
In this section, the role of power electronics in HEV is highlighted and a detailed comparison of the associated advanced power system architectures for HEV as well as electric vehicle (EV) and fuel cell vehicle (FCV) applications is discussed.
During mid-1950s, automotive industries started using 12 V power systems. The battery pack which during this period had six cells set instead of three cells. The demand of electrical power had peaked to 1 kW by the 1990s [6,7,8].
The conventional electric system of a single 14 V is shown in Fig. 4.1 was able to satisfy (a) vehicular loads like lightings, motor-driven fans, pumps, and compressors. A major drawback of the 14 V system was regarding the control aspect. The switches were manually controlled and hence lacked precision [7, 8]. In addition, the power level did not meet the requirement of 1 kW. The battery voltage varied from 9 to 16 V which created overrating the loads at nominal system voltage (Fig. 4.2).

Conventional 14 V DC power system architecture [9]
In view of increasing the electrical load and overcome the disadvantages in the conventional system, mild hybrid EV (MHEV) was introduced with a voltage rating of 300 V. Figure 4.3 shows a block diagram representation of MHEV. This topology takes care of loads including lights, pumps, fans, and electric motors for various functions. In addition, they also include some advanced, electrically assisted vehicular loads, such as power steering, air conditioner/compressor, electromechanical valve control, active suspension/vehicle dynamics, and catalytic converter [7].

Architecture of Mild HEV [9]
In future EVs, power electronics is believed to take measure on three major tasks. (a) Turning ON/OFF loads, which are executed by mechanical switches and relays in conventional cars [8]. (b) A dedicated controller for electrical machinery. (c) For changing system voltage levels and conversion of electrical power from one form to another, using DC–DC, DC–AC, and AC–DC converters.
4 Introduction to DC–DC Converters
A DC–DC converter referred to as SMPS (switch mode power supply) is used to change the voltage levels without change in electrical power [10]. The components of a DC–DC converter include (a) electronic switch, (b) inductor, L, (b) capacitor, C, and (c) resistive load. The electronic switch can be a MOSFET, IGBT, or thyristor-based on the operating voltage and frequency.
These DC–DC converters are distinguished as (a) Isolated and (b) Non-Isolated. Few examples of isolated converters are (a) Flyback, (b) Forward, (c) Push–Pull, and so on. These converters possess a transformer at the input side of the converter. This transformer isolates the primary from the secondary and prevents the travel of input voltage spikes to the output secondary side. Based on inductor discharging, continuous conduction mode (CCM) and discontinuous conduction mode (DCM) operations occur [11, 12].
Some examples non-isolated topology are (a) Buck, (b) Boost, (c) Buck–Boost, (d) Cuk, (d) SEPIC, and (e) Zeta converters. Buck and Boost converters are used as a step-down and step-up voltage levels. Buck-boost converters either buck or boost the voltage depending on the duty cycle. Cuk and SEPIC converters are used in EV charging systems as they always produce continuous input current [13, 14].
The modeling of non-isolated and isolated DC–DC converters in open loop is presented in [10, 15]. The converters considered were ideal and operated in CCM. The converters were modeled using volt-sec and amp-sec balance equations using modeled using MATLAB/Simulink. In reality, the switch has a resistor in series, diode contains a forward voltage and resistance, L and C possess equivalent series resistance (ESR).
In [16], the converters were modeled considering the various drops in the converter. Different methods of modeling were presented using MATLAB/Simulink. It was shown in [16] that the three methods provided similar output voltages. It was concluded from [16] that the built-in models in Simulink under Simscape and Simulink libraries provided only steady-state quantities. However, mathematical modeling of the converter using equations provided information about transient and steady-state quantities.
5 Stability of DC–DC Converters
In any DC–DC converter duty cycle can be considered as one of the inputs. Hence, a DC–DC converter consists of input voltage Vg and duty cycle, d. Hence, there exit two transfer functions viz.; output voltage to input voltage (Gvg) and output voltage to duty ratio (Gvd). To obtain these transfer functions, there exit numerous techniques like (a) small-signal modeling, (b) state-space averaging, (c) circuit averaging, and so on [17].
It was shown in [17] that the transfer function of average inductor current to duty ratio (Gid) for the Boost and Synchronous Boost converter was stable. This is a critical aspect for the converters for power factor correction. In [13, 14], it was shown that G obtained from small-signal model and that of circuit averaging matched. It was shown that Gvd for Cuk and SEPIC in CCM and DCM was unstable and stable, respectively.
6 Application of DC–DC Converters in Drives
The mathematical model for a DC separately excited motor is shown below [1]
where Va is the supply voltage (V), ia (A) is the armature current, Ra and La are the armature resistance (Ω), and inductance (H), respectively, Ea is the Back EMF (V), T and TL are the torque induced in the armature and load torque (Nm), respectively, J is the Moment of Inertia (kgm2), B is the magnetic co-efficient (T), ω is the speed (rad/s), and ϕ is the flux induced (Wb).
To study the dynamics of the system, this motor was modeled and simulated using MATLAB/Simulink in open-loop and closed-loop configurations. An appropriate step size as per [18] was chosen and the no-load speed and speed––torque relation was analyzed.
The motor constants were defined in MATLAB (3 kW, 220 V). Figure 4.4 shows the Simulink model for the motor.

Mathematical model for a separately excited DC motor
Figure 4.5 shows the no-load speed of the motor. It is observed that the no-load speed settles in <1 s and the magnitude of the speed was around 180 rad/s.

No-load speed versus time
Since no-load torque was applied, the armature current was reduced to zero under steady-state conditions. Since T ᾳ ia, T also reaches zero under steady-state conditions (Figs. 4.6, 4.7).

Armature torque versus time

Armature current versus time
The closed-loop implementation of the motor can be modeled using PWM control. The speed of the machine is controlled using a boost converter. Figure 4.8 shows closed-loop implementation in MATLAB/Simulink.

Closed-loop speed control using PWM control
In order to achieve a constant speed of 110 rad/s, a boost converter operating in CCM was considered. By continuously changing the duty cycle of the converter, the speed is regulated. Figure 4.9 shows a step variation in the speed at t = 5 s.

A step variation in the speed at t = 5 s.
A PID controller is used to control the speed. Manual tuning approach is carried to tune Kp, Ki, and Kd parameters (Fig. 4.10).

Kp, Ki, and Kd for constant speed operation
Figure 4.11 shows the closed-loop response of the motor for constant speed operation. It is observed that the speed settles to the desired value in ~3 s. The response can be made faster by further tuning the PID parameters. Figure 4.12 shows the variations in the duty cycle for achieving constant speed. The procedure obtaining the actual values of Kp, Ki, and Kd is shown in [19].

Closed-loop response

Variation in D versus time
7 Control Techniques in DC–DC Converters
In the DC–DC converter the various control techniques are used for
-
(a)
Output voltage
-
(b)
Input voltage
-
(c)
Average current
-
(d)
Peak current mode (PCM)
Average current control (ACC) is one of the popular techniques used in power factor correction (PFC) circuits. The ratio of the perturbed value of switch current or the inductor current to that of duty cycle, Gvd is considered for achieving unity power factor. A controller is necessary to control Vg and ig in phase with each other. Figure 4.13 shows the block diagram representation of closed-loop ACC in a switched converter. Though ACC cannot provide instantaneous control, some of the advantages of ACC over PCM include (a) better noise immunity and (b) possible control for a wide range of applications.

Closed-loop ACC in a switched converter [14]
Where Rf is the sensing resistor, vc is the reference voltage based on reference current ic, Gci is the controller, Vg and V0 are the input and output voltages.
PCM is mainly used for the protection of switches from current transients. Figure 4.14 shows the closed-loop implementation of PCM applied to a buck converter [12].

Closed-loop PCM applied to a buck converter [12]
The control current ic(t) is used as a reference and compared with the switch or the inductor current is(t). When is(t) reaches its peak value, the switch (transistor) is switched off. The analog comparator consists of two inputs viz., (a) sensed switch current and (b) control input—which sets the peak current.
SR latch during the start, sets the signal enabling the switch ON condition. The current is(t) starts ramping up. When iL = ic = is, reset signal would be enabled. This cycle repeats and control is ensured. It was clearly shown in [12] that D > 0.5 PCM would be unstable in all the converters.
8 DC–DC Converters in EV/HEV
In order to achieve high voltage gain and high efficiency, zero current switching (ZCS) and zero voltage switching (ZVS) switched DC–DC converters are used [20]. The duty cycle plays a very important in selecting the converter. An illustration of the selection of duty cycle is shown below.
Design a converter for the following specifications.
Specification | Value |
|---|---|
Output voltage | 36 V |
Input voltage | 5 V |
Output current | 0.5 A |
Current ripple | 10% |
Voltage ripple | 1% |
Switching frequency | 25 kHz |
If selection is a boost converter,
If selection is either Buck–Boost, Cuk, or SEPIC, D = 0.87.
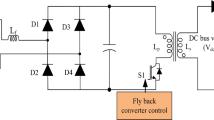
If selection is flyback converter,
Let D = 0.35
(N2/N1) = 14 based on
Re-calculate duty ratio for \( \frac{N_2}{N_1}=14 \)
Hence, a flyback converter is best suited for this application as D = 0.86/0.87 causes higher losses. Therefore, in general, it is desired to choose a converter having smaller duty ratio.
The conventional converters suffer from the following disadvantages
-
(a)
High ripple current
-
(b)
D increases with the increase in the input voltage
-
(c)
Increased Voltage stress on the diode
These problems can be eliminated by using an interleaved boost converter. These converters generate losses due to hard switching and low efficiency for a higher output voltage. Hence, it is preferable to use zero current transition (ZCT) IBC with an auxiliary circuit [20]. This circuit reduces the reverse recovery time of the output diode and will turn on naturally at zero current. Figures 4.15 and 4.16 show the conventional boost and the Conventional IBC, respectively [20].

Conventional boost converter [20]

Conventional IBC [20]
In order to achieve higher efficiency, a zero voltage zero current switch interleaved boost converter (ZVZCS IBC) is used. Figure 4.17 shows the circuit diagram of ZVZCS IBC.

ZVZCS IBC with coupled inductor [20]
In each phase of interleaved boost converter, an auxiliary circuit is placed which helps to accomplish a ZCS turning on of main switch and ZVS turning off of main switch [20].
It was shown in [21] that the four-phase IBC diminished the input current ripple till D = 75% and can be eliminated for greater than 90% of D.
In order to generate a high gain in converters, KY converters are used [19]. These converters provide a swift transient response. They reduce the stress on the output capacitor and voltage ripple at the output [19]. The gain can be adjusted using various PWM techniques. Figure 4.18 shows a KY converter with gain M = 1 + D.

KY converter [19]
Figure 4.19 shows the circuit diagram of a KY boost converter which is integrated with a KY converter and a traditional boost converter. Voltage transformation ratio, M of the KY boost converters can be expressed as:

KY converter [20]
These converters are used in applications where the current ripple is fixed and high efficiency is required.
9 DC–AC Converters in EV/HEV
9.1 Comparative Analysis of Two- and Three-Level Inverter
A performance comparison study of two and three-level inverters has been carried out in [22]. The use of EV and HEV reduces carbon emission compared to IC engines. The battery source used in EV is supplied to the inverters to drive motors which are coupled with the car wheels.
In order to increase power density in the system, maximum power in the system should be transmitted to the load instead of wasting in the power electronic converters. DC–AC inverter system provides high-power density for EVs. The function of an inverter is to change a DC input voltage to a symmetrical AC output voltage of desired magnitude and frequency.
9.2 2-Level DC/AC Traction Inverter Drive
Two-level inverters are most widely used DC–AC inverter. This type of inverter has problems with higher switching losses at higher switching frequencies. This problem worsens if the DC link voltage increases as the device voltage needs to be increased. To reduce the torque ripple of the machine, the switching frequency need to be increased. Figure 4.20 shows the two-level inverter-based PMSM traction.

Two-level DC/AC traction inverter [22]
Drive connected with the car wheel. In the above circuit Iinvrms, Iinvavg, Icaprms are the RMS values of inverter currents supplied to the load, average current supplied by the battery, and ripple current supplied by DC link capacitor, respectively.
In the above model, if the machine speed increases above the base speed, the switching frequency will be kept constant at 12 kHz depending on DC link voltage and torque requirement of the load. Usually, DC link voltage would be fixed at 450 V to keep switch losses minimum. But this introduces more current for the same value of output power when compared to higher DC bus voltage. In order to avoid this higher value of current many electrical companies are replacing their two-level inverter voltage drive with the three-level inverter. The three-level inverter reduces switching losses and for the same DC link voltage, voltage rating also reduces.
9.3 Three-Level Neutral Point Clamped (NPC) DC/AC Traction Inverter
Figure 4.21 shows a three-level NPC inverter circuit connected to the vehicle wheel through PMSM. It can be observed that the switch count is doubled when compared to a two-level inverter, due to which the voltage stress on all the switches is reduced by half when compared to a two-level inverter. There are additional six diodes connected to the neutral point DC link, because of this capacitor voltage will be unbalanced.

Three-level neutral point clamped DC/AC traction inverter [22]
9.4 DC-Link Voltage Balancing Scheme
Figure 4.22 is proposed in [22] to balance DC-link voltage in the three-level inverter. The above scheme proposes two DC-link capacitor voltages that are measured by two voltage sensors and the difference between the measured value is passed through a logic control block. If the difference between the capacitor voltage is greater than the particular tolerance value, the circuit uses an upper capacitor to discharge, and if the difference voltage is lower than the tolerance value it uses a lower capacitor to discharge. The proposed scheme also avoids unsymmetrical switching.

NPC inverter control circuit with DC-bus voltage balancing [22]
Simulation results in [22] indicate that the total conduction loss for the three-level inverter is higher than the two-level inverter because of the presence of more switches and diodes when compared to the two-level inverter.
In [22] a detailed comparison of two-level and three-level inverters is carried out with a main focus on the switching losses. A low switching loss-based DC link voltage balancing algorithm is used which keeps the two capacitor voltage differences below tolerance level.
9.5 Five-Leg Inverter for an Electric Vehicle in Wheel Motor Drive
A 5-leg single inverter was used for controlling 2 three-phase PMSM motors independently [22]. This method provided an innovative solution to reduce the switch count and hence, decreased the overall cost of the drive. This arrangement also reduces the controller and sensor costs.
Figure 4.23 shows the proposed five-leg inverter-based in-wheel EV motor drive. The five-leg inverter is a single inverter that can drive two motors independently. This inverter consists of five legs, which are primarily a pair of arms that consist of power switching devices and diodes.

Five-leg inverter-based in-wheel motor drive [23]
Figure 4.24 shows the switching arrangement of a five-leg inverter based in-wheel motor drive. The “C” phase of each motor is connected to one leg in common; the A and B phases of each motor are connected to other legs. As “C” phase of each motor is connected to the common leg of the inverter, it causes a difference in switching pattern.

Configuration of a five-leg inverter with 2 three-phase PMSM in-wheel motors [23]
Numerous modulation methods have been proposed for five-leg inverters. However, these methods cannot be used for in-wheel motor drives as each wheel motor requires a dissimilar control torque in order to maintain vehicle stability during cornering.
A modulation method known as modified expanded two-arm modulation (ETAM) can be adopted for in-wheel EV drive applications [23]. By doing so, a voltage utility factor (VUF) of 50% is achieved. The VUF is defined as the ratio of the inverter and DC-link voltage. The in-wheel motor drive methodology was analyzed in terms of converter efficiency, torque ripple, converter rating, vehicle performance, and cost.
10 Simulation of Three-Level Inverter
Simulation of a three-level inverter is carried using sine pulse width modulation (SPWM) method. Figure 4.25 shows the model developed using MATLAB/Simulink.

MATLAB/Simulink model of SPWM
Figure 4.25 shows the PWM generation using Simulink. A modulated signal (Sine) is compared with a carrier signal (Triangular). Whenever the amplitude of the sine wave becomes greater than that of the triangular signal, a pulse is generated. This pulse is used to trigger the switches S1, S2, …, S6. The switching frequency and the DC-link voltage were 6 kHz and 400 V, respectively (Figs. 4.26, 4.27).

Simulink model for three-level inverter

Output voltages of a three-level inverter
11 Conclusion
In this chapter, a brief introduction on the choice of selection of motors for EV / HEV application is discussed. DC motors are not suited for EV applications as they suffer from commutation failure and need regular maintenance. The mathematical model for a separately excited DC motor was developed and simulated using MATLAB/Simulink. The results of the simulation clearly showed the dependence of armature torque on the armature current. The emergence of power electronics in HEV and the associated architecture was briefly touched upon. Later, an introduction to DC–DC and DC–AC converters was provided. Constant speed control for a separately excited DC motor was achieved using a simple boost converter. The different types of DC–DC and DC–AC converters used in EV/HEV were shown. The simulation of three-level inverter using built-in Simulink blocks was also discussed.
References
Chau, K. T., & Li, W. Overview of electric machines for electric and hybrid vehicles. International Journal of Vehicle Design, 64(1), 46–71.
Surya, S., Marcis, V., & Williamson, S. (2021). Core temperature estimation for a Lithium ion 18650 cell. Energies, 14(1), 87.
Surya, S., & Arjun, M. N. (2020). Effect of fast discharge of a battery on its core temperature. In 2020 International conference on futuristic technologies in control systems & renewable energy (ICFCR) (pp. 1–6). IEEE.
Li, X., Yao, M., Yang, Q., Wang, M., & Yang, B. (2020). Modeling of an integrated drive unit in an electric vehicle. In 2020 IEEE transportation electrification conference & expo (ITEC) (pp. 125–127). IEEE.
Surya, S., Bhesaniya, A., Gogate, A., Ankur, R., & Patil, V. (2020). Development of thermal model for estimation of core temperature of batteries. International Journal of Emerging Electric Power Systems 1, ahead-of-print.
Krein, P. T., Roethemeyer, T. G., White, R. A., & Masterson, B. R. (Oct 1994). Packaging and performance of an IGBT-based hybrid electric vehicle. In Proc. IEEE workshop power electron. transport., Dearborn, MI (pp. 47–52).
Kassakian, J. G. (2001). The future of electronics in automobiles. In Proc. 13th Int. Symp. Power Semicond. Devices ICs, Osaka, Japan (pp. 4–7).
Ehsani, M., Gao, Y., Gay, S. E., & Emadi, A. (Dec. 2004). Modern electric, hybrid electric, and fuel cell vehicles: Fundamentals, theory, and design. CRC Press.
Emadi, A., Williamson, S. S., & Khaligh, A. (2006). Power electronics intensive solutions for advanced electric, hybrid electric, and fuel cell vehicular power systems. IEEE Transactions on Power Electronics, 21(3), 567–577.
Surya, S., & Srividya, R. (2021). Isolated converters as LED drivers. Cognitive Informatics and Soft Computing. Springer, Singapore, pp. 167–179.
Hart, D. W. (2011). Power electronics. Tata McGraw-Hill Education.
Erickson, Robert W., and Dragan Maksimovic. Fundamentals of power electronics. Springer Science & Business Media, 2007.
Surya, S., & Williamson, S. (2021). Generalized circuit averaging technique for two-switch PWM DC-DC converters in CCM. Electronics, 10(4), 392.
Surya, S., Channegowda, J., & Naraharisetti, K. (2020). Generalized circuit averaging technique for two switch DC-DC converters. arXiv preprint arXiv:2012.12724.
Surya, S., & Arjun, M. N. (2021). Mathematical modeling of power electronic converters. SN Computer Science, 2(4), 1–9.
Surya, S. (2021). Mathematical modeling of DC-DC converters and Li ion battery using MATLAB/Simulink. In Electric vehicles and the future of energy efficient transportation (pp. 104–143). IGI Global.
Surya, S., & Williamson, S. (2021). Modeling of average current in ideal and non-ideal boost and synchronous boost converters. Energies, 14, 5158.
Surya, S., & Patil, V. (2019). Cuk converter as an efficient driver for LED. In 2019 4th International conference on electrical, electronics, communication, computer technologies and optimization techniques (ICEECCOT) (pp. 49–52). IEEE.
Surya, S., & Singh, D. B. (2019). Comparative study of P, PI, PD and PID controllers for operation of a pressure regulating valve in a blow-down wind tunnel. In 2019 IEEE International Conference on Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER) (pp. 1–3). IEEE.
Verma, R., & Shimi, S. L. (2018). Analysis and review of DC-DC converter for electric vehicle. In 2018 Second international conference on intelligent computing and control systems (ICICCS) (pp. 1649–1654). IEEE.
Li, W., & He, X. (2010). Review of nonisolated high-step-up DC/DC converters in photovoltaic grid-connected applications. IEEE Transactions on Industrial Electronics, 58(4), 1239–1250.
Choudhury, A., Pillay, P., & Williamson, S. S. (2014). A performance comparison study of space-vector and carrier-based PWM techniques for a 3-level neutral point clamped (NPC) traction inverter drive. In 2014 IEEE international conference on power electronics, drives and energy systems (PEDES) (pp. 1–6). IEEE.
Jain, M., & Williamson, S. S. (2010). Modeling and analysis of a 5-leg inverter for an electric vehicle in-wheel motor drive. In CCECE 2010 (pp. 1–5). IEEE.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Surya, S., P., S., Williamson, S.S. (2022). A Comprehensive Study on DC–DC and DC–AC Converters in Electric and Hybrid Electric Vehicles. In: Kathiresh, M., Kanagachidambaresan, G.R., Williamson, S.S. (eds) E-Mobility. EAI/Springer Innovations in Communication and Computing. Springer, Cham. https://doi.org/10.1007/978-3-030-85424-9_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-85424-9_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-85423-2
Online ISBN: 978-3-030-85424-9
eBook Packages: EngineeringEngineering (R0)