
Abstract
Currently, construction norms recommend developing calculation methods based on real nonlinear deformation diagrams of materials in general and structural elements in particular. Recent studies based on nonlinear models have shown that the calculation of compression elements, especially based on nonlinear deformation models, is accompanied not only by quantitative solutions, but also by qualitatively new results. In this regard, the development of a method for calculating compressed wooden elements based on models of nonlinear deformations is an important task of practical importance. The article develops an effective numerical method for determining the strained state and the load-bearing capacity of wooden elements operating on off-center compression in general, using a deformation diagram approximated by a quadratic parabola during wood compression. Applying the hypothesis of flat sections when constructing a method, the level of deformation on the edge and the relative height of the compression zone of the cross section linearly determined by comparing the curved axis of the shaft with a sine wave under eccentric compression. The method of numerical solution of the established system of solvent equations is explained. The proposed solution methodology also allows you to build a load-bending graph for a compressed element..
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The calculation of compressive elements based on linear models leads to different levels of errors in determining the strained state and load-bearing capacity, depending on the eccentricity of the compressive force and the flexibility of the compressed element. Therefore, there is a need to apply a nonlinear deformation model in the development of methods for calculating compressed building elements, especially wooden ones, since only on the basis of such models can we obtain results that are realistic and consistent with experimental studies. In flexible compressive elements, the load-bearing capacity is often determined by the stability condition. The paper develops an effective numerical method for constructing the load - bending relationship, which is indicated by the use of a diagram approximated by the law of a quadratic parabola when stretching-compressing the wood.
2 Main Part
2.1 Purpose of the Article
The aim of the article is to develop an effective numerical method for determining the parameters and load-bearing capacity that characterize the strained state of wooden elements working on compression, based on a model of nonlinear deformation. The article presents a system of nonlinear solvent equations for any value of the eccentricity of the compressive force and the flexibility of the element, as well as a method for numerical solution of the system using any diagram approximated by the law of the quadratic parabola when stretching or compression of the wood.
2.2 Research Methodology
The solution of the problem for the level of arbitrary load is assumed by the correctness of the hypothesis about the distribution of the longitudinal strain over the cross section. Then, under eccentric compression, the curved axis of the shaft is approximated by a sinusoid, and the deflection of the most stressed part of the shaft is expressed by these two parameters. The system of nonlinear equations for solving the problem is obtained from the equilibrium equations for the considered area. Based on the level of deformation of the extruded surface, the relative height of the compression zone of the corresponding cross-section, the deflection parameter and the load parameter are determined. By varying the strain in equal steps in the strain region, the parameters characterizing the strained state and the coordinates of the “load-bend” graph are determined, on the basis of which the bearing capacity of the compressed element can be defined.
2.3 Results
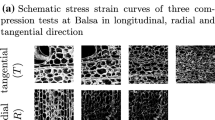
The wood tension–compression strain diagram can be approximated based on the following diagram, which includes both the compression work and the tensile work. [1,2,3]:
In general, the accuracy of the flat cross-section hypothesis for an off-center compressed wooden element is assumed to be [2,3,4,5], then we can write that to change the relative strain along a rectangular cross-section,
(1) According to the diagram, the neutral axis does not pass through the center of gravity of the cross-section even in pure bending, because the resistance of the wood material to tension and compression is different, so the distribution of strain over the cross-section depends on (2). Now, considering Eq. (2) in (1), we can write down the distribution of normal stresses in the cross-section.:
Regardless of whether the neutral axis is inside or outside the cross-section, the following expressions can be written for the main vector of normal stresses in the cross-section [1, 2] and the head moment of this vector relative to the center of gravity of the cross-section. based on Eq. (3):
In the above expressions, we go to the strain level of the extruded fiber. For this reason, it is assumed that when \(\varepsilon \; = \;\varepsilon_{f,\max }\) is, the tangent modulus is zero, and the stress value corresponding to this deformation is equal to the compressive strength of the wood R. From these conditions it follows that according to the accepted diagram (1) \(\varepsilon_{f,\max } \; = \;\frac{E}{2B}\) and \(R\; = \;\frac{{E^{2} }}{4B}\). Then take into account that the above equations are based on this is \(\varepsilon_{f} \; = \beta \cdot \frac{E}{2B}\), including for the strain level \(\beta \; = \;\frac{{\varepsilon_{f} }}{{\varepsilon_{f,\max } }}\; = \;\varepsilon_{f} \cdot \frac{2B}{E}\). Then we can write that
They satisfy the dimensionless parameters and conditions \(0\; \le \beta \; \le \;1\) and \(\xi \; > \;0\) used in these equations, which are then used to solve practical problems. Now suppose that the ends of the compressing element are fastened by a hinge and that this element is compressed by an eccentric system. We express the equation of the deformable axis of the compressed element in the form of a sinusoid [2], that is, we assume that \(y\left( x \right)\; = f \cdot \sin \frac{\pi \cdot x}{l}\), it has the value of curvature \(\chi \; = \;\left| {y^{\prime\prime}\left( \frac{l}{2} \right)} \right|\; = f \cdot \frac{{\pi^{2} }}{{l^{2} }}\) in the most stressed middle section. On the other hand, the value of the curvature in the mean cross-section is based on the flat cross-section hypothesis is \(\chi \; = \;\frac{{\varepsilon_{f} }}{\xi \cdot h}\; = \;\frac{\beta }{\xi \cdot h} \cdot \frac{E}{2B}\). Therefore, the deflection of the middle section can be expressed by a parameter that determines the level of deformation in the extruded fiber of this section and the position of the neutral axis. Therefore, the deflection of the middle section can be expressed by a parameter that determines the level of deformation in the extruded fiber of this section and the position of the neutral axis.:
Where,
Now we write the equilibrium equations of the middle part of the compressed shaft:
Here you can write the equilibrium equations based on the two parameters as follows, taking into account Eq. (6) and \(\sigma_{0} \; = \;\frac{P}{b \cdot h \cdot R}\) including the notation (9):
From these two equations, you can write the following equation, which eliminates the compressive force parameter \(\sigma_{0}\) and creates a relationship between the parameters \(\beta\) and \(\xi\) [1]
The peculiarity of this equation is that for each accepted value of the strain level from this equation, the value of the parameter that determines the position of the neutral axis can be set to one value. The deflection parameter can then be calculated based on Eq. (6) and finally the force parameter based on Eq. (9). Thus, solutions can be obtained for each value of the strain level \(\left( {\beta ,\;\xi ,\;f_{0} ,\;\sigma_{0} } \right)\) by applying the semi-inverse method. By changing the strain parameter in the range of its variation, a relationship can be established between the deflection parameter and the load parameter, on the basis of which the bearing capacity of the compressed shaft can be determined. To implement the algorithm, the corresponding software module was implemented and numerical experiments with its application were carried out. For example, in the following figure, where \(E\; = \;27 \cdot 10^{3} \;MPa\), \(B\; = \;3645 \cdot 10^{3} \;MPa\), \(l\; = \;4,5\;m\), \(h\; = \;0,6\;m\) at different values of the eccentricity \(\sigma_{0} \; \div \;f_{0}\), that is,” load-bending “ graph is built in dimensionless parameters (Fig. 1).

Graph “load-bending” of a compressed shaft, the ends of which are fastened pivotally; 1 – \(e_{0} \; = \;0,05\); 2 – \(e_{0} \; = \;0,2\); 3 – \(e_{0} \; = \;0,5\)
2.4 Scientific Novelty
An effective numerical method has been developed for determining the tensile deformation state and bearing capacity for an arbitrary assessment of the eccentricity of the compressive force and elasticity of an element when approximating the deformation diagram under tension–compression of wood by a quadratic parabola.
2.5 Practical Importance
The developed method of numerical calculation makes it possible to construct semi-empirical dependences for approximate engineering calculations based on numerical experiments, as well as to determine the strained state and the load-bearing capacity of compressed wooden elements based on a real nonlinear deformation diagram. the material and its results can be used to improve regulatory documents.
3 Conclusions
Based on the research, it can be said that the influence of the eccentricity of the compressive force on the bearing capacity is large and should be determined using this nonlinear deformation model.
References
Hajiev MA, Aliev RD, Guliyev FM (2019) Calculation of bending reinforced concrete elements for strength according to normal sections. Baku, p 121
Sanzharovsky RS, Veselov AA (2002) Theory of calculation of building structures for stability and modern standards. Moscow-Saint Petersburg, ACU, p 126
Pyatikrestovsky KP (2011) Power resistance of spatial wooden structures under short-term and long-term loads: dis. by Doctor of Technical Sciences, p 320
Pyatikrestovsky KP, Khunagov HS (2013) Nonlinear deformations of statically indeterminate wooden structures. Izvestiya vuzov. Construction, no 11–12, p 21–30
Varenik KA (2016) Calculation of centrally compressed wooden elements taking into account creep: dis. by Candidate of Technical Sciences. St. Petersburg, p 167
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Baghirzade, N. (2022). Calculation of Wooden Elements Based on the Nonlinear Deformation Model. In: Onyshchenko, V., Mammadova, G., Sivitska, S., Gasimov, A. (eds) Proceedings of the 3rd International Conference on Building Innovations. ICBI 2020. Lecture Notes in Civil Engineering, vol 181. Springer, Cham. https://doi.org/10.1007/978-3-030-85043-2_5
Download citation
DOI: https://doi.org/10.1007/978-3-030-85043-2_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-85042-5
Online ISBN: 978-3-030-85043-2
eBook Packages: EngineeringEngineering (R0)