
Abstract
The paper is devoted to simulation analysis of three different types of motorcycle suspension systems - passive, idealized semi-active and active suspensions. The equivalent motorcycle mathematical model is derived, in which the leaning front and rare spring-damper units are replaced by the equivalent vertical spring-damper units. The road roughness excitation is considered in the form of a deterministic bump and also stochastic excitation modelled by the Shinozuka method with a given power spectral density. The effective acceleration of the motorcycle body centre of mass, which significantly determines the rider comfort level, is used to compare the three different types of suspension systems. The simulation results for the stochastically uneven road show 25.4% improvement for the semi-active suspension and 31.2% improvement for the active suspension. For the deterministic “hat” bump the improvements are 33.2% for the semi-active suspension and 61.5% for the active suspension - compared to the passive motorcycle suspension system.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
A motorcycle dynamics model consists of a rigid body which is connected to the front and rear wheels with the front and rare suspension systems [1, 2]. The motorcycle body consists of the chassis, rider, steering head and engine. It represents the motorcycle sprung mass. The front and rare unsprung masses are represented by wheels and all other masses attached to them. The suspension system of a motorcycle is designed to meet the following two conflicting demands:
-
a good level of the rider comfort as he drives along an uneven road,
-
a good wheel grip on the road to maintain good tyre to road contact.
The conventional non-adjustable passive suspension systems involve passive springs and dampers with non-variable rates. The stiffness and damping parameters are chosen based on a compromise between the ride comfort and good tyre to road contact over a wide range of road and speed conditions. Their characteristics of vibration isolation are rather limited. Low damping leads to good vibration isolation at high frequencies but poor resonance characteristics. Higher damping leads to good resonance characteristics but the performance at higher frequencies is poor.
The necessity of improving vibration isolation of passive suspension systems motivated investigation of controlled suspension systems [3, 4], where e.g., damping characteristics are controlled in closed loops. The control strategies can be divided into two categories: active and semi-active. In the fully active suspension system, the conventional suspension elements are replaced with electric or hydraulic actuators. The force demand signal is typically generated in a microprocessor governed by a control law (e.g., skyhook or balance control). The optimum transmissibility has no resonance amplification. Their performance is superior to any conventional passive suspension system. But they are still costly, less reliable, having high energy consumption and possible instability.
A compromise between active and passive suspension systems are semi-active suspension systems. In automotive engineering, especially magnetorheological dam-pers attracted a lot of interest over the past decades for their quick time response and low energy needs.
2 Modelling of a Motorcycle
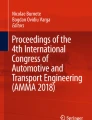
The motorcycle dynamics model, Fig. 1, is composed of the the sprung mass 1 (consisting of the motorcycle rigid body and the driver), the unsprung front mass 2 (the front wheel), the unsprung rare mass 3 (the rare wheel), the front spring-damper modul 4 and the rare spring-damper modul 5. Both the leaning spring-damper modu-les are placed between the sprung and unsprung masses [1, 2].

Motorcycle parts.
Motion of motorcycle parts is described by four coordinates \(z_{1} ,\)\(z_{2} ,\) \(z_{3} ,\)\(\varphi _{{{\kern 1pt} 3}} ,\) Fig. 2, which are independent. The coordinate \(z_{1}\) describes the vertical displacement of the front unsprung mass and the coordinate \(z_{2}\) describes the vertical displacement of the rare unsprung mass. The coordinate \(z_{3}\) describes the vertical motion of the sprung mass centre \({\text{T}}_{3}\) and finally the angular coordinate \(\varphi _{{{\kern 1pt} 3}}\) describes the pitching angular motion of the sprung mass \(m_{3}\) about the sprung mass centre \({\text{T}}_{3}\). All coordinates are measured from their equilibrium positions. The coordinates \(u{\kern 1pt} _{1}\) and \(u{\kern 1pt} _{2}\) describe the uneven road surface. The tyre stiffness coefficients are \(k_{3}\) and \(k_{4}\) and the equivalent coefficients of stiffness and damping \(k_{{1,eq}}\), \(k_{{2,eq}}\), \(b_{{{\kern 1pt} {\kern 1pt} 1,eq}}\) and \(b_{{{\kern 1pt} {\kern 1pt} 2,eq}}\)(corresponding to the leaning spring-damper modules, Fig. 1) in the main suspension are given below, Eqs. [1] to [4]. The motion equations of a motorcycle with the leaning passive suspension systems are derived in the form of sa set of the second order ordinary differential equations, which were derived in [5].

Equivalent motorcycle model with vertical passive suspension systems.
Based on potential energy considerations (equality of potential energy of the original leaning spring-damper module and the substitute vertical spring-damper module), the equivalent stiffness coefficient \(k_{{1,eq}}\) in the front suspension is determined by the following equation derived in [5]
where \(k_{1}\) is the spring stiffness coefficient of the original leaning spring-damper module and \(\varepsilon _{1}\) is the lean angle. Similarly based on the Rayleigh dissipative function the equivalent damping coefficient can be derived
Similarly for the rare suspension the equivalent spring and damping coefficients of the substitute vertical spring-damper module above the rare wheel are as follows [5]
where \(\varepsilon _{2}\) is the lean angle of the rare spring-damper module, \(L\) is the length of the swinging arm and \(L_{{{\kern 1pt} 1}}\) is the distance between the point at which the swinging arm is joined to the motorcycle body and the point at which the substitute vertical spring-damper module is joined to the swinging arm, Fig. 3.

Equivalent stiffness and damping coefficients of the rare suspension.
3 Semi-active Suspension System
The equations of motion of the ideal semi-active suspension, Fig. 4, have the same form as the equations of the passive system [5], but instead of the damping coefficients of the hydraulic dampers b1,eq and b2,eq, the variable coefficients of the semi-active dampers bsa,1,eq and bsa,2,eq are used
3.1 Sky-Hook Control of Semi-active Dampers
The idealized semi-active suspension systems allow us to determine the force intervals of real magnetorheological dampers and their efficiency in comparison with the idealized semi-active dampers. A conventional sky-hook control [4] is used.
The forces exerted by fictitious sky-hook dampers (imagined to be hooked in the sky) acting at points A and B, Fig. 4, are as follows
The damping forces exerted by the front and rare semi-active dampers bsa,1,eq, bsa,2,eq are
Equalities of these forces
lead to equations determining the equivalent damping coefficients of the semi-active dampers

Equivalent motorcycle model with semi-active suspension systems.
The desired damping forces \(F_{{{\text{sa,1,eq}}}}\) and \(F_{{{\text{sa,2,eq}}}}\) can be exerted only if the the relative velocities between the sprung and unsprung masses and the absolute velocities of points A and B are of the same sign. The on-off conditions of the front semi-active damper are as follows: if
then the damper is on, otherwise is off. If
then the rare damper is on, otherwise is off.
3.2 Active Suspension System
The equations of motion of the motorcycle with the active suspension system differ from the equations of motion of the motorcycle with the semi-active suspension system in the fact that instead of the semi-active dampers bsa,1,eq and bsa,2,eq the actuators are used. The actuators have to exert the forces \(F_{{sky,1}}\) and \(F_{{sky,2}} .\) However, in this case the on-off conditions are not applied, because the actuators are able to exert the required forces in required directions at any time, unlike the semi-active dampers.
4 Simulations with Matlab and Results
The deterministic non-normalized bump of “hat” shape is shown in Fig. 5. It takes into account to some extent the actual tyre shape, because the road-tyre contact is in Matlab simulation considered as point contact.

Road bump of “hat” shape.
In Fig. 5 is: the circumscribed circle radius R, the bump length d, the bump height hm. The stochastic road is represented by the sum of sine functions using the Shinozuka method [6].
Values of parameters of the motorcycle simulation model are: \(m_{1} = 15\;{\text{kg}},\) \(m_{2} = 18\;{\text{kg}},\) \(m_{3} = 194\;{\text{kg}},\) \(I_{3} = 38\;{\text{kg}} \cdot {\text{m}}^{2} ,\) \(k_{1} = 15000\;{\text{N/m}},\) \(k_{2} = 24000\;{\text{N/m}},\) \(k_{3} = 180000\;{\text{N/m}},\) \(k_{4} = 180000\;{\text{N/m}},\) \(b_{{{\kern 1pt} 1}} = 710\;{\text{N}} \cdot {\text{s/m}},\) \(b_{{\,2}} = 1171\;{\text{N}}\,{\text{s/m}},\) \(l_{1} = 0.64\;{\text{m}},\) \(l_{2} = 0.7\;{\text{m}},\) \(\varepsilon _{1} = 27^{ \circ } ,\) \(\varepsilon _{2} = 20^{ \circ } ,\) \(L = 0.6\;{\text{m,}}\) \(L_{1} = 0.6\;{\text{m,}}\) \(v = 11\;{\text{m/s,}}\) \(R = 4.68\;{\text{m}},\) \(d = 2.68\;{\text{m}},\) \(h_{m} = 0.06\;{\text{m}}{\text{.}}\) Parameters of the stochastic road: \(S_{u} \left( {\Omega {\kern 1pt} _{0} } \right) = 22.10^{{ - {\kern 1pt} 6}} \;{\text{m}}^{3}\) (asphalt-concrete road of average quality), \(v = 20\;{\rm{m/s}}{{.}}\) The sky-hook damping coefficients are: \(b_{{sky,1}} = b_{{sky,2}} = 2200\,{\rm{kg/s}}.\)
In Table 1 values of the motorcycle body centre of mass effective acceleration and displacement for the ride over the deterministic „hat“ bump and along the stochastic road are shown.
Dependence of the centre of mass \({\text{T}}_{3}\) vertical displacement \(z_{3}\) and acceleration \(\ddot{z}_{3}\) on time for the ride over the deterministic bump and along the stochastic road for the three different suspension systems is shown in Figs. 6 and 7.

The centre of mass \({\text{T}}_{3}\) displacement \(z_{3}\)- „hat“ shaped bump.

The centre of mass \({\text{T}}_{3}\) acceleration \(z_{3}\)- stochastic road.
5 Conclusions
The simulation results presented in Abstract show substantial reduction of the value of the motorcycle body centre of mass effective acceleration for both active and semi-active motorcycle suspension systems and both deterministic bump and stochastic road in comparison with the passive motorcycle suspension system. This fact is important for improving comfort of the motorcycle rider because the motorcycle body centre of mass effective acceleration is a decisive factor determining his comfort level.
Based on experience with other vehicle and seat suspension systems it is possible to expect significant improvements also in the case of using real magnetorheological dampers in the motorcycle suspension systems. Their use will be investigated in further research.
References
Jazar, R.N.: Vehicle Dynamics: Theory and Application. Springer, Melbourne (2008)
Cossalter, V.: Motorcycle Dynamics. 2nd edn. Vittore Cossalter, Padova (2002)
Venhovens, P.J.Th.: Optimal control of vehicle suspensions. Doctoral Thesis, Delft University of Technology. Fac. Mech. Eng. (1993)
Guglielmino, E., Sireteanu, T., Stammers, C.W., Ghita, G., Giuclea, M.: Semi-active Suspension Control. Improved Vehicle Ride and Road Friendliness. Springer, London (2008). https://doi.org/10.1007/978-1-84800-231-9
Segla, S., Roy, S.: Dynamic simulation analysis of a motorcycle suspension system – assessment of comfort. Manuf. Technol. 20(3), 373–377 (2020)
Nigam, N.C., Narayanan, S.: Applications of Random Vibration. Springer-Verlag, Berlin (1994)
Acknowledgements
This work was funded by project grant VEGA No. 1/0500/20.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Segla, S., Roy, S. (2022). Simulation Analysis of a Motorcycle with Passive, Idealized Semi-active and Active Suspension Systems. In: Beran, J., Bílek, M., Václavík, M., Žabka, P. (eds) Advances in Mechanism Design III. TMM 2020. Mechanisms and Machine Science, vol 85. Springer, Cham. https://doi.org/10.1007/978-3-030-83594-1_15
Download citation
DOI: https://doi.org/10.1007/978-3-030-83594-1_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-83593-4
Online ISBN: 978-3-030-83594-1
eBook Packages: EngineeringEngineering (R0)