
Abstract
Ride-sharing Autonomous Mobility-on-Demand system (RAMoD), whereby self-driving vehicles provide coordinated travel services on-demand and potentially allowing multiple passengers to share a trip, has recently emerged as a promising solution to cope with several problems such as low vehicle utilization rates, pollution, and parking spaces. The expected uncertain travel demand on such systems and its resulting imbalance and insufficient charging resources require an efficient fleet management strategy. This paper focuses on designing and testing an integrated strategy for dispatching, rebalancing, and charging by accounting for the uncertain travel demands. Specifically, we first devise a novel multi-objective possibilistic (MILP) model, which contemplates the variability and uncertainty affecting travel demands in the RAMOD systems. The main target is to centralize the various decisions in order to keep vehicle availabilities balanced over the planning horizon and the transportation network so that travel requests are satisfied at a minimum cost. Second, leveraging appropriate strategies, we transform this fuzzy formulation into an equivalent auxiliary crisp multi-objective model. Due to the conflicting nature of the considered objectives, a goal programming approach with specific weights for each goal is used to compute an efficient compromise solution. Results show the applicability and usefulness of the proposed fuzzy approach as well as its merits compared to other schemes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Personal-vehicles contribute significantly to increasing levels of pollution, traffic congestion, and in several instances the under-utilization of vehicles. Explicitly, in 2015 the utilization rate of owned automobiles in the U.S. is about 5% [1], certainly unsustainable practice for the years to come. The urgent need to deal with these trends spurred the conception of efficient, cost-competitive, and more sustainable transportation systems such as ride-sharing (e.g. Lyft and Uber) and car-sharing (e.g. Car2Go and Zipcar).
Nevertheless, without efficient fleet management, these emerging transportation systems will inevitably lead to a problem of vehicle imbalances: due to the asymmetry between travel destinations and origins, vehicles rapidly depleted in some stations while becoming accumulated in others, affecting the quality of service.
Autonomous vehicles have the particular advantage of being capable of rebalancing themselves, in addition to the enhancement of system-wide coordination, cost reduction, convenience, and potentially rise safety of not needing a human driver.
Accordingly, these distinctive advantages has spurred the device of strategies that entail to optimally rebalance Autonomous Mobility on Demand (AMoD) systems by repositioning empty vehicles.
A Specific focus is also given to the development of dispatching strategies that attempt to optimally assign the customers to self-driving vehicles, in order to satisfy the customer’s request at each time period. However, as we will show in the literature review section, most of the proposed strategies either assume deterministic customer requests or do not integrate operational constraints such as parking capacities and electric vehicle charging, which restricts their practical application.
In particular, while customer request is relatively predictable, it is subject to considerable uncertainties due to various external factors such as traffic conditions and weather. Thus, successful rebalancing and dispatching strategies must deal with these uncertainties. Although some recent research works have been developed to address this key challenge, these studies consider the uncertainty of demand approximately by using probability concepts. A probability distribution is generally derived from historical data. Nevertheless, when there is a lack of such information, the standard probabilistic approaches are not appropriate. In particular, in several practical situations, the uncertain parameters can be obtained subjectively based on the experience and managerial judgment. For example, the uncertain customer request may be more suitably expressed either in imprecise terms (e.g. approximately 500 demand per hour) or in linguistic terms (e.g. ‘low’, ‘high’ ‘moderate’). However, such vagueness in the critical data cannot be captured in a stochastic or deterministic formulation, and thus the associated optimal results may not accomplish the real objective of modeling. Zadeh [2] introduced the Fuzzy Set Theory and the Possibility Theory to handle the epistemic uncertainty of this type.
To the best of the authors’ knowledge, the only paper exploring the potential of fuzzy set theory to deal with uncertainty in AMOD systems is the preliminary version of this article appeared as [3].
This extended version includes as additional contributions: (i) integration of the charging process, (ii) integration of a number of real-world constraints such as parking space limitations, charging stations capacities, and charging duration, which extend the practical application of the proposed approach, (iii) additional simulation results and corresponding discussion, and (iv) proofs of all results.
More specifically, the purpose of this article is to develop and test an integrated strategy for dispatching, rebalancing, and charging decisions for Ridesharing Autonomous Electric Mobility On-Demand systems. In this regard, we design a three-phase approach, which starts with introducing a new Multi-Objective Possibilistic Linear Programming model that handles the uncertainty affecting future travel demand. The goal is to reduce transportation costs and improve customer satisfaction. In the second phase, the fuzzy model is converted into an auxiliary crisp MOLP model by applying a combination of appropriate strategies. Then, the well-known GP approach is exploited to find an efficient compromise solution for the multi-objective problem.
The rest of this article is organized as follows. In the next section, we review some well-known existing works and outline their limitations. Section 3 provides some basic notions regarding the fuzzy set theory and the goal programming method. Then, we detail the model of the RAMoD system in the presence of uncertain travel demand and formulate the integrated dispatching, rebalancing, and charging problem. Section 5 proposes a three-phase fuzzy strategy to deal with the issue under consideration. In Sect. 6, computational results are reported to highlight the feasibility of our proposed approach in practice. The last section concludes this work together with some future direction of research.
2 Literature Review
The last decade has been marked by the rapid expansion and the promising development of AMOD and RAMOD systems. Its multiple strengths have spurred a number of companies and researchers to aggressively pursue the design and analysis of these emerging transportation systems. Previous work can be categorized into three major areas: simulation-based models, model predictive control (MPC) algorithms and queuing-theoretical models.
In [4], the authors introduce the “Expand and Target” algorithm that has been integrated with scheduling strategies to automatically dispatch self-driving vehicles. They implement an agent-based simulation framework and evaluate the effectiveness of the proposed approach based on the New York City taxi data. The results show that the algorithm greatly enhances the performance of the AMOD systems: increases the travel success rate by around 8% and decreases the average waiting time for passengers by around 30%.
Another study conducted in New York City [5] addressed both the problems of assigning travel requests to vehicles and finding optimal routes for the vehicle fleet while varying passenger capacities. The results show that a fleet of 3000 vehicles with a four-passenger capacity or even 2000 vehicles with a ten-passenger capacity can serve 98% of the travel demands, currently supported by more than 13,000 single-occupant vehicles. However, specificities of the model (for instance, the algorithms employed to represent the traffic flow) are still unexplained, and only very little information has been reported in this regard.
Another study [6] conducted in a similar context of ride-sharing systems for a case study conducted in Austin implemented a simulation framework in Java. The authors suggested that shared AMoD systems without introducing dynamic ride-sharing can increase congestion levels and travel times.
Melbourne, Australia is another city for which the performance of AMoD systems has been explored using an agent-based simulation tool [7]. This work also has discovered a quadratic relationship between Vehicle-Kilometres Travelled and AMoD fleet size. The findings of this simulation model showed that an AMoD system under demand uncertainty, which provides either ridesharing or car-sharing service could decrease the fleet size by 84%. This, however, can increase the current Vehicle-Kilometres Travelled by up to 77% while car-sharing is allowed, and 29% in the ride-sharing systems.
On the other hand, the queueing-theoretical approach is commonly used for the modeling and analysis of AMoD systems. Zhang and Pavone [8], for instance, implemented this method to conduct a real-world case study of New York City. They first cast the transportation system within a Jackson network model with the concept of “passenger loss” (i.e. if there are no vehicles parked at a station, instead of waiting, the passengers will immediately exit the system). Second, the theoretical insights have been leveraged to design a real-time rebalancing algorithm, where the objective is to reduce the number of rebalancing self-driving vehicles on the roads, while still maintaining a balance throughout the transportation network.
An extended and revised version of this paper appeared as [9] by extending the proposed Jackson network approach by adopting a Baskett–Chandy–Muntz–Palacios (BCMP) queuing-theoretical framework [10, 11]. Such a BCMP framework allows capturing vehicle routing, stochastic customer arrivals, battery charging-discharging for electric vehicles as well as traffic congestion.
The significance of the results in these papers could be in providing a rigorous approach to the problem of rebalancing and routing as well as a rapid determination of the corresponding performance metrics. However, both of the studies fail to address the case where several passengers may share the same vehicle that each person travels alone. Moreover, these works consider a static instead of a dynamic number of travelers since they only change pick-up location without leaving the system.
In [12], a fog based-architecture was proposed to handle charging and dispatching problems. The fog-based design delivers the micro-management of electric vehicles to the fog controller of each zone that is near the passengers, thus minimizing communications and computation delays. Using a queuing model, this paper focuses on representing multi-class dispatching and charging processes and finding the optimal number of required vehicles (i.e. vehicle dimensioning) for each zone in order to ensure a bounded response time. Decisions on the relative proportions of vehicles of the different classes to directly serve passengers or to fully/partially charge are also optimized so as to minimize the overall number of vehicles in-flow to a given area. While the proposed dispatching and charging architecture seems promising, the model assume a certain customer request, fail to address the critical issue of vehicle imbalance and do not leverage the emerging paradigm of ride-sharing service.
Due to their capacity to accommodate complex constraints and their simplicity, a number of previous studies on the control of AMoD and RAMoD systems use a network flow framework to model the transportation system.
For instance, Rossi et al. [13] investigate the problem of rebalancing and routing a shared fleet of self-driving vehicles offering on-demand mobility services for a capacitated road network, where congestion is susceptible to disrupt throughput. Within the proposed network flow model, empty rebalancing and customer-carrying vehicles are represented as flows over the capacitated network. Using the real road network of Manhattan, the authors show the efficiency and the superior performance of the proposed rebalancing and routing algorithm compared to state-of-the-art algorithms. Despite these significant findings, it was interesting for the authors to investigate other approaches to reduce congestion, such as ride sharing services. Moreover, the paper fails to explore the interaction between the power network and such electric fleets and assume that travel demands are known with certainty.
Salazar et al. [14] devise a multi-commodity network flow optimization approach that captures the interaction between public transit and AMoD systems. This model aims to maximize social welfare by minimizing the operational costs generated by the intermodal AMoD system together with customers’ travel time. Real-world case studies were undertaken in the transportation networks of Berlin and New York, which allowed to assess of the significant benefits of intermodal systems such as reducing the total number of vehicles, travel times, overall costs, and pollutant emissions. However, the proposed model considers only single-occupant vehicles and fails to capture the uncertainty effects such as variable travel demand, time-varying traffic congestion, and transportation delays.
MPC algorithms are amenable to achieve efficient performance and allow for the incorporation of complex and constrained systems. Accordingly, they have been widely employed in problems ranging from control to analyze AMoD and RAMoD systems. MPC algorithm (also called receding horizon control) is an iterative control technique by which an optimization problem is solved at each stage to produce a series of control actions up to a given fixed horizon, and the first action is implemented [15].
In [15], a linear discrete-time model to optimize vehicle scheduling and routing in an AMoD system was proposed allowing the easy inclusion of several real-world constraints such as vehicle charging constraints. Then, leveraging this formulation an MPC algorithm was devised for the optimal coordination of the self-driving vehicles in the transportation network. At each time step, the optimization problem is solved as a mixed-integer linear program, with the objective of avoiding unnecessary vehicle rebalancing and servicing passengers as quickly as possible. Although numerical results demonstrate that the proposed approach outperforms previous strategies, these real-world data were run for moderately-sized systems and without considering ride-sharing services.
A time-expanded network has been exploited in [16] to model the AMoD system. Such a model allows simultaneously finding the minimum fleet size and the optimal rebalancing policy. This formulation was adopted to devise an MPC algorithm to operate the AMoD system in real-time by taking into account short-term forecasts of travel demand. For this purpose, the authors use a forecasting model trained based on historical data and neural networks. The complexity of the proposed approach does not depend on the number of passengers or the number of vehicles. Thus it can be implemented to control large-scale transportation systems. However, the authors did not indicate if the proposed MPC algorithm can be employed to effectively control ridesharing systems.
To address the stochasticity of travel demand, [17] introduces a stochastic MPC algorithm leveraging the uncertainty of demand forecasts for dispatching and rebalancing self-driving vehicles in an AMoD system. To generate the forecasts, The Long Short Term Memory (LSTM) neural network was used to estimate the mean of future travel demand. The proposed algorithm was tested using real data, and it has been exhibited that the latter outperforms state-of-the-art non-stochastic approaches. However, the authors did not discuss if the proposed algorithm can achieve similar gains by predicting stochastic future demand in the context of ride-sharing systems.
This will be the subject of the paper appeared as [18], which focuses on devising an MPC approach for RAMoD systems based on the present and future customer request. The goal of this MPC algorithm is to minimize the weighted combination of the operational costs and the total travel time (i.e. maximize the social welfare). Despite the fact that this model was developed to respond to travel requests in a ride-sharing context, the authors choose to focus only on double-occupancy vehicles and they avoid investigating high-occupancy models given computational complexity.
To position our research work in the extended domain of AMoD systems, we use four criteria, namely the decision processes handled, the modeling approach used, the source of uncertainty that the problem deals with, and whether the ride-sharing service has been addressed. Table 1 shows a summary of the related works analyzed above in accordance with these four dimensions. The majority of these studies are fairly recent because AMoD and RAMoD systems are emerging transportation systems. As mentioned before, the majority of these studies fall into three specific groups: simulation-based models, queuing-theoretical models, and MPC algorithms.
Simulation models are based on the interaction of complex choice models and microscopic interactions and are a very interesting modeling approach that allows to accurately capture transportation systems. Although such a modeling approach has shown its effectiveness to deal with real transport networks, it fails to find an optimal solution for the problem of controlling AMoD systems.
Queueing-theoretical models are amenable to efficient capture the uncertainty of the travel demands, which can be adapted to an efficient control synthesis [19]. Such modeling approaches have been built upon the “Jackson network” concept [20], in which all road segments are modeled as queues of vehicles waiting to cross an intersection. According to the Jackson network concept, the new arrivals at each queuing station occur following the random Poisson process, assuming constant rates of occurrence for a given random variable. For example, if the random variable is passenger arrival times, constant rates of occurrence will assume that passengers will arrive at a constant rate at a station for a specified period of time. This means that this concept fails to reflect the time-variant nature of the passenger arrival rates that occurs in the real world, and thereby reduces realism. Thus, although queuing models can lead to a tractable solution to the complex challenges of AMoD systems, the outlined drawback restrict the ability of transport modelers to provide a realistic view of these systems.
Despite the advantage of efficiently implementing time-varying travel demand compared to the previously discussed approaches, the most current MPC algorithms assume a deterministic future travel demand. Moreover, the limited number of models that address uncertainty to forecast travel requests mainly suggest the use of stochastic programming. Whenever historical data is unavailable or even unreliable, reasoning probabilistic approaches may not be the best option. Thus, the Fuzzy set theory [21] and the possibility theory [2] are adequate to handle such problems with a lack of data knowledge. Subsequently, it has been successfully adopted for modeling and dealing with uncertainties in a variety of disciplines such as supply chain planning [22], image processing [23], Business Process modelling [24], web services [25], etc. Despite these advents, the only research work exploring the potential of the fuzzy logic to deal with uncertainties in AMoD systems is our previous work appeared as [3]. As mentioned in Table 1, the major technical difference is that in this research work we address the integrated problem for dispatching, rebalancing, and charging for RAMoD systems, rather than the dispatching and the rebalancing problem.
In the following section, the basic concepts of the fuzzy set theory and the possibility theory are summarized.
3 Basic Concepts
This section briefly outlines the fuzzy set theory, the triangular fuzzy numbers and the goal programming method used in this paper.
3.1 Fuzzy Set Theory
Fuzzy set theory was first suggested by Zadeh [21] to model and handle information pervaded by uncertainty and imprecision. Moreover, it allows easy integration of subjective experts’ judgments. From a mathematical perspective, a fuzzy set is a class of elements characterized by a membership function. Unlike classical logic, the attachment of an element to a class is not anymore binary but rather a matter of degree ranging from zero to one. There are various kinds of fuzzy numbers. Among these different shapes, Triangular Fuzzy Numbers and Trapezoidal Fuzzy Numbers (illustrated respectively in Figs. 1 and 2) are the most popular ones.
3.2 Triangular Fuzzy Numbers
In this paper, the pattern of triangular fuzzy numbers (TFN) is adopted to model the imprecise travel demands. Due to its various advantages, this kind of fuzzy numbers has been widely adopted in the literature. Among others, the simplicity of collecting the required information, intuitiveness (i.e., a decision-maker usually finds it significantly easier to identify the most pessimistic, optimistic, and likely values of a given business process), and efficiency in related computations are the key advantages. These benefits were our principal motivation for adopting the TFNs pattern for representing the imprecise information in our problem. For more detailed theoretical justifications of TFN, we refer the reader to [26, 27].
As depicted in Fig. 1, a TFN \(\tilde{N}\) = (n1, n2, n3) where n1, n2, n3 are receptively the most pessimistic, the most possible and the most optimistic value of \(\tilde{N}\) evaluated by the decision-maker.
Definition 1:
The TFN \(\tilde{N}\) can be defined by the following membership function:

The triangular possibility distribution of \(\tilde{N}.\)

The trapezoidal possibility distribution of \(\tilde{Z}.\)
Definition 2:
Let A and B two triangular fuzzy numbers defined as N = (n1, n2, n3), M = (m1, m2, m3). The main operations on these fuzzy numbers can be summarized as follows:
3.3 Goal Programming
There are a number of multi-objective decision-making approaches in the scientific literature. Among them, goal programming which is one of the most powerful techniques for processing multi-objective models in concrete decision-making. This technique was originally proposed by Charnes et al. [28] and successfully implemented in several issues [29, 30]. The popularity of the GP approach is based, among others, on its robustness, its mathematical flexibility, and its accuracy.
The formulation of the GP approach is based on introducing for each criterion an expected goal to be achieved and identifying the best solution that minimizes the sum of the deviations from these objectives. However, the application of the GP method in practical decision-making problems can face a significant challenge, namely the integration of decision-makers’ preferences. In such a situation, the use the Weighted Goal Programming (WGP) method comes in handy.
The basic form of WGP can be written as:
Where:
-
\({\text{C}}_{{\rm{k}}}\)(\({\text{x}}\)) is the kth constraint.
-
\({\mathbf{g}}_{{\mathbf{i}}}\) is the target value of the objective function i.
-
\({\text{F}}_{{\text{i}}} ({\text{x}})\) is the evaluation of the solution x with respect to criterion i.
-
\({\text{w}}_{{\text{i}}}^{ + }\) is the weight attached to the positive deviation.
-
\({\text{w}}_{{\text{i}}}^{ - }\) is the weight attached to the negative deviation.
-
\(\updelta _{{\text{i}}}^{ + }\) is the positive deviation from the goal \({\text{g}}_{{\text{i}}}\).
-
\(\updelta _{{\text{i}}}^{ - }\) is negative deviation from the goal \({\text{g}}_{{\text{i}}}\).
4 The Problem Setting
As depicted in the literature review section, significant progress has been achieved in recent years to control and analyze AMoD and RAMoD systems. However, these various initiatives are conducted in urban areas and do not address the specificities of low-density where travel solutions are scarcer.
The problem considered in this paper is motivated by the Tornado Mobility research project [31], aiming to study the interaction between connected infrastructures for mobility services and autonomous vehicles in a low-density environment.
For this propose, we consider a transportation network partitioned into multiple stations and served by self-driving vehicles offering on-demand mobility services. All autonomous vehicles in this transportation network are multiple-occupancy, i.e. they can serve several customers at any given time without exceeding their carrying capacity.
The considered fleet of self-driving vehicles is endowed with a high level of heterogeneity, i.e. transportation costs, carrying capacity, and speeds can be very different from one vehicle to another.
In the specific context of the Tornado project, passengers can request transportation to and from in the predefined road network via a mobile application. If there are available cars, one of them will be assigned to carry this customer towards its destination. Otherwise, the customer will leave the system immediately without any waiting time. This is because we adopt in our RAMoD system the customer model referred to as a “passenger loss” model [8, 9]. A consequence of this model is that the number of passengers at each station is always zero (since users either leave the system or depart immediately with a car). Such an assumption is well suited for AMoD and RAMoD systems where a high-quality service is desired [9].
By the trip’s end, the vehicle could either assigned to provide other on-demand mobility or rebalance itself throughout the transportation network. It could also park in the drop-off station or even recharge its battery at a charging station.
Each station in the transportation network has a limited number of parking spaces and charging resources.
Note that the time is measured in discrete and ordered intervals.
The proposed model differs from other traditional approaches, as we do not assume perfect knowledge of future travel requests; Instead, it was assumed that such critical information is evaluated by the decision-maker using fuzzy numbers.
5 A Solution Procedure for the Dispatching, Rebalancing and Charging Problem
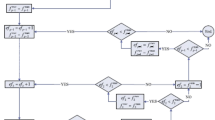
To address the challenging problem detailed in the previous section, we propose a three-phase framework, where the main stages are illustrated in Fig. 3 and detailed in the following sub-sections.

A solution procedure for the Dispatching, Rebalancing and Charging problem.
5.1 Phase I: Formulation of the Dispatching, Rebalancing and Charging Problem
-
Notation
Below are the indices, decision variables and parameters used in the formulation of the problem.
-
Indices
- t:
-
index of time periods (t = 1, 2…, T).
- v:
-
index of vehicles (v = 1, 2…, V).
- s:
-
index of stations (s = 1, 2, …, S).
-
Parameters
- \(\user2{\tilde{{C}}r}\)t,s1,s2:
-
number of travel requests from station s1 to station s2 in period t.
- Ds1, s2:
-
distance separating the stations s1 and s2.
- SPv:
-
sailing speed of the autonomous vehicle v.
- Capv:
-
carrying capacity of the autonomous vehicle v.
- initv,s:
-
indicates the availability of the autonomous vehicle v at station s in the first period. i.e. if vehicle v is initially available at station s, initv,s = 1 and 0 otherwise.
- RCv:
-
rate of charge of the autonomous vehicle v at a charging station.
- RDv:
-
rate of discharge of the autonomous vehicle v while driving.
- Park_caps:
-
number of parking space at the station s.
- Ch_caps:
-
number of charging station at the station s.
-
Decision Variables
- Parkv,t,s:
-
binary variable specifying if the autonomous vehicle v is parked in station s during the period t.
- Chv,t,s:
-
binary variable indicating if the autonomous vehicle v is charging in station s during the period t.
- Waitv,t,s:
-
binary variable indicating if the autonomous vehicle v is waiting in station s during the period t.
- Missv,t:
-
binary variable specifying if the autonomous vehicle v is on mission during the period t.
- Miss_Tv,s1,s2,t1,t2:
-
binary variable specifying if the autonomous vehicle v is on a transport mission from the station s1 to the station s2 starting at period t1 and arriving at period t2.
- Miss_Rv,s1,s2,t1,t2:
-
binary variable specifying if the autonomous vehicle v is on a rebalancing mission from the station s1 to the station s2 starting at period t1 and arriving at period t2.
- Socv,t:
-
shows the state of charge of the autonomous vehicle v over time. i.e. a value Socv,t = 1 means that the battery of the vehicle v is fully charged at the end of the period t while Socv,t = 0 means that the battery of v is depleted at the end of t.
- S_Crt,s1,s2:
-
The number of satisfied travel demands from station s1 to station s2 starting at the period t.
-
-
Mathematical Model
Using the notation of the previous sub-section, a multi-objective possibilistic linear programming model can be written as:
-
Objective Functions
We consider two major and conflicting goals in our integrated dispatching, rebalancing, and charging problem: the total cost (TC) and the level of customer satisfaction (\(({\text{L}}\tilde{\text{C}}{\rm r})\)).
-
Objective 1: Minimizing the total cost.
$$ \begin{array}{*{20}c} {Minimize\;TC = \mathop \sum \nolimits_{{t1,t2 = 1}}^{T} ~\mathop \sum \nolimits_{{s1,s2 = 1}}^{S} \mathop \sum \nolimits_{{v = 1}}^{V} RD_{v} *Dist_{{s1,{\text{ }}s}} } \\ {*\,(Miss\_T_{{v,s1,s2,t1,t2}} + {\text{ }}Miss\_R_{{v,s1,s2,t1,t2}} )} \\ \end{array} ~ $$(9) -
Objective 2: Improving the level of customer satisfaction through minimizing the number of lost travel demands.
$$ Minimize\; L\tilde{C}r= \mathop \sum \nolimits_{{t = 1}}^{T} \mathop \sum \nolimits_{{s1,s2 = 1}}^{S} C\tilde{r}_{{t,s1,s2~}} - {\text{ }}S\_Cr_{{t,s1,s2}} $$(10)
-
-
Model Constraints
$$ \begin{array}{*{20}c} {Park_{{v,t,s}} ,\;Ch_{{v,t,s}} ,\;Wait_{{v,t,s}} ,\;Miss_{{v,t}} ,\;Miss\_R_{{v,s1,s2,t1,t2}} ,\;Miss\_T_{{v,s1,s2,t1,t2}} } \\ {\epsilon \; \left\{ {0,1} \right\}\quad t,\;t1,\;t2,\;s,\;s1,\;s2,\;v} \\ \end{array} $$(11)$$ Soc_{{v,t}} \, \epsilon \, \left[ {0,1} \right]\quad \forall v,t $$(12)$$ S\_Cr_{{t,\,s1,\,s2~}} \ge 0\;and\;integer\quad \forall \,s1,\;s2,\;t $$(13)
-
The limitation of the decision variables is presented by the Eqs. (11), (12), and (13): S_Crt,s1,s2 is an integer, Socv,t is ranging from zero to one, while other variables are binary.
Constraints (14) presents the two possible states that an autonomous vehicle can take, i.e. parking in a station and being on a mission. On the other hand, this equation ensures that a vehicle can have just one state at any given time.
When a vehicle is parked in a station, two different actions can be achieved: it can charge at a charging point or wait for customers. This is specified using the constraint (15), which also means that the vehicle can perform just one action at any given time.
Similarly, when a self-driving vehicle is on a mission, two different actions can be performed (i) transport one or several passengers from one station to another, and (ii) travel without passengers to rebalance the RAMoD system. These constraints are specified using the Eq. (16), which also implies that a self-driving vehicle can perform only one action at any given time.
Equation (17) states that a vehicle cannot be parked at a station s during the first period if, and only if, it is initially available at this station. Similarly, a self-driving vehicle v may only travel on a passenger(s) transport mission or a rebalancing mission from a station s during the first period if, and only if, it is initially available at this station.
Equation (18) ensures that if a self-driving vehicle v is parked at a station s during a time period t, it must be physically located in s at the beginning of t.
When a self-driving vehicle v is on a mission from station s1 to station s2 beginning at t1, v must be physically located in s1 at the beginning of t1. It means, either the vehicle v i) parked at s1 during the last period (i.e. Parkv,t−1,s1 = 1) or ii) arrived at s1 during the last period (i.e. Miss_Tv,s3,s1,t3,t1−1 = 1 Or Miss_Rv,s4,s1,t4,t1−1 = 1). The constraints (19) and (20) ensure that this rule is respected respectively for passenger transport missions and rebalancing missions.
Constraint (21) represents the parking capacity limitation for all time. This means that the overall number of vehicles parked at a station s during the time period t (i.e. \(\mathop \sum \nolimits_{{v = 1}}^{V} Park_{{v,t,s}}\)) must not exceed the parking space limitation at the station s (i.e. Park_caps).
Equation (22) indicates the charging capabilities at each station for all time.
Constraint (23) assures that self-driving vehicles dispatched to transport customer(s) from one station to another cannot serve more customers than requested.
Constraint (24) guarantees that the number of satisfied travel demands from station s1 to station s2 starting at the period t1 cannot exceed the overall capacity of the vehicles dispatched to transport passengers from s1 to s2 starting at t1.
Equations (25) and (26) model the evolution of each vehicle’s charge while assuming that the batteries are fully charged at the beginning of the first period.
Equations (27) and (28) are the charge constraints to ensure that each self-driving vehicle has sufficient charge to accomplish its trip. Specifically, Eq. (27) guarantees enough charge for rebalancing trips, and Eq. (28) guarantees enough charge for passengers’ trips.
5.2 Phase II: Development of an Axillary Multi-objective Linear Model
In this paper, we adopt the TFNs pattern for representing the imprecise travel request in the customer satisfaction objective function and constraint (23). As outlined below, triangular possibility distribution \(\widetilde{{Cr}}\) can be presented by the triplet (Crp, Crm, Cro) where Crp, Crm and Cro are the most pessimistic value of \(\widetilde{{Cr}}\), the most possible value of \(\widetilde{{Cr}},~\) and the most optimistic value of \(\widetilde{{Cr}}\).
The main goal of this second phase is to treat such fuzzy parameter and transform the proposed fuzzy formulation into an equivalent auxiliary crisp multi-objective model.
-
Treating the Soft Constraint
To treat the fuzzy travel request in the right-hand side of Eq. (23), the well-known weighted average method is implemented for the defuzzification process and transforming the \(\widetilde{{Cr}}\) parameter into an equivalent crisp number.
This method was first developed by Lai and Hwang [33] and has been successfully implemented in several research studies [34,35,36] due to its efficiency and simplicity. In order to do so, we must first identify a minimal acceptable possibility degree of occurrence for the fuzzy parameter, α. The original fuzzy constraint (23) can then be represented by a new crisp equation as described below:
Where and w1, w2, and w3 designate respectively the weight of the most pessimistic, the weight of the most possible, and the weight of the most optimistic of the fuzzy travel and verifying the following equation:
In practice, these weights, as well as the minimum acceptable degree of possibility α, can be subjectively specified on the basis of the decision maker’s knowledge and experience.
In our framework, we use the concept of most likely values, which is extensively adopted in the literature [33]. In accordance with this concept, the most optimistic and pessimistic values should be given a lower weight than the most possible value. Therefore, similarly to [33], we fix these parameters as follows:
-
Treating the Imprecise Customer Satisfaction Objective Function
Due to the inaccuracy of the travel request parameter in the customer satisfaction objective function, it is typically not possible to identify an optimal solution to the problem defined by the Eqs. (9)–(28).
In the academic literature, various approaches are suggested to find compromise solutions [33, 37,38,39,40]. As stated by Hsu and Wang [41], the first four strategies are predicated on restrictive assumptions and are usually hard to implement in practice, we, therefore, adopt Lai and Hwang’s approach [33, 35].
Since the imprecise travel request \( \tilde{C}r \) is modeled using a triangular-shaped possibility distribution, the customer satisfaction objective function \( L\tilde{C}r \) could also be represented by a triangular possibility distribution. This imprecise goal is geometrically presented by the three main points (LCrp, 0), (LCrm, 1), and (LCro, 0). It is consequently possible to minimize the fuzzy goal by pushing these critical points towards the left.
According to Lai and Hwang’s approach, resolving this problem consists of minimizing LCrm, maximizing (LCrm − LCrp), and minimizing (LCro − LCrm). Thus, our imprecise customer satisfaction objective function can be converted into three crisp objectives as described below:
5.3 Phase III: Finding a Preferred Compromise Solution
In the previous phase, the proposed multi-objective possibilistic model has been transformed into an equivalent auxiliary crisp multi-objective model. In this third phase, we adopt the Weighted Goal Programming method, incorporating specific weights for each criterion, allowing us to treat this multi-objective model.
Therefore, we can reformulate our problem as below:
Where:
-
\(TC^{*}\) is the goal calculated based on the mathematical model with the total cost objective function (9) subject to constraints (11)-(22), (24)–(29), and \(\delta _{{TC}}^{ + }\) is the positive deviation from this goal.
-
\(Z_{1}^{*}\) is the goal calculated using the mathematical model with the objective function (32) subject to the constraints (11)–(22), (24)–(29), and \(\delta _{1}^{ + }\) is the positive deviation from this goal.
-
\(Z_{2}^{*}\) is the goal calculated using the mathematical model with the objective function (33) subject to the constraints (11)–(22), (24)–(29), and \(\delta _{2}^{ - }\) is the negative deviation from this goal.
-
\(Z_{3}^{*}\) is the goal calculated using the mathematical model, with the objective function (34) subject to the constraints (11)–(22), (24)–(29), and \(\delta _{3}^{ + }\) is the positive deviation from this goal.
-
WTC,WZ1,WZ2 and WZ3 are the importance weights of the various goals such that WTC + WZ1 + WZ2 + WZ3 = 1.
6 Numerical Experiments
In this section, we present numerical experiments to demonstrate the validity and applicability of our integrated strategy for dispatching, rebalancing, and charging decisions, especially in the presence of imprecise travel demands. Then, we explore the performance of the newly suggested strategy, in comparison with other dispatch strategies by varying travel demand over the forecast horizon.
For all experiments, we consider five stations and a fleet size of 20 self-driving vehicles.
The forecast horizon is decomposed into ten time periods. Such periods correspond to 10 different predicted travel demands with TFNs.
At the beginning of the first period, the self-driving vehicles were distributed equally over the road network, i.e. six vehicles for each station.
The carrying capacity of the vehicles is characterized by a high level of heterogeneity, which varies from a single capacity to a ten-passenger capacity.
For simplification purposes, we assume that the travel time between two given stations is a one-time step. Moreover, we consider that the importance weight of the various goals is the same (i.e. WTC = WZ1 = WZ2 = WZ3 = 1/4).
For all numerical experiments, the suggested approach has been implemented using the LINGO optimization package.
6.1 Detailed Results
Figure 4 illustrates the results generated by the suggested approach by specifying the status of self-drive vehicles over the planning horizon.
We remind that a self-driving vehicle can be on a rebalancing mission, be on a customer(s) transport mission, and be waiting or charging in a station.
These different decisions are constrained by the criteria of minimizing overall costs and maximizing customer satisfaction in each period of the forecast horizon.
It has been found that the increased cost of transporting a vehicle leads to not using it if the travel request can be met by vehicles with lower costs. For instance, during the first period, travel requests were met with the various stations. Especially for S2, this fuzzy travel demand has been met by using the V5 and V6 with the use of ride-sharing, while the V7 and V8 remain parked in S2 due to their significantly higher transportation costs. Similarly, in the second period, V10 and V11 remain parked in S3 as travel demand was met by self-driving vehicles with lower transportation costs (i.e. V2, V6, and V17). With the increasing travel demands in the third and fourth periods and directed by the maximization of customer satisfaction, all vehicles in the fleet were launched on missions, including the most costly ones.
Nevertheless, beyond the 5th time period, the mobilization of all the fleet’s vehicles becomes insufficient to meet travel request, especially when certain stations are more popular than others, at the end of the journey, vehicles tend to accumulate in these stations and deplete in others. This justifies the need to integrate rebalancing decisions from overloaded stations to under loaded ones as a solution to the problem of vehicle imbalances. Such decisions are also driven by the cost-minimization criterion. In fact, the least costly vehicles will be assigned in the first place to rebalancing missions.
6.2 Performance Analysis
To explore the performance of the proposed strategy (called “D-R-C-RAMoD-Fuzzy” in this section), we conducted numerical experiments comparing it against other strategies. Specifically, these dispatching strategies are three different variants of the newly suggested approach.
-
D-C-RAMoD-Fuzzy: This version is exclusively dedicated to the problem of dispatching and recharging, and vehicles do not rebalance in any circumstances.
-
D-R-C-AMoD-Fuzzy: This version uses the same model outlined in the previous section for single-capacity vehicles (i.e. without the use of ride-sharing service).
-
D-R-C-RAMoD-Perfect: This is the integrated strategy for dispatching, rebalancing, and charging proposed in the previous section based on exact travel demand as it appears in the data set as a forecast for the next ten periods. It is an effective approach to finding the optimal dispatching, rebalancing, and charging policies in the situation where the customer’s demand is already known in advance. In this way, it can be leveraged to deliver upper bounds of system performance.
The results of this comparative analysis are summarized in Fig. 5, which provides an illustration of the number of lost travel requests for each strategy over time.
As intended, the approach with precise travel demands is undoubtedly the most powerful strategy, with reduced transport costs and a minimum number of lost travel requests.
The “D-R-C-AMoD-Fuzzy” strategy has by far the most poor performance, with mean lost travel demands sixfold than that of the “D-R-C-RAMoD-Perfect” approach and multiplied by four compared to that of our suggested strategy (i.e. D-R-C-RAMoD-Fuzzy”. That is not unexpected, because here the single-capacity policy is compared to ride-sharing schemes, where the maximum allowable capacity of vehicles is increased to ten.

Vehicle scheduling as a function of time.
The significant difference in performance between the “D-R-C-RAMoD-Perfect” strategy and the “D-C-RAMoD-Fuzzy” strategy can also be observed from Fig. 5, illustrating the number of lost travel requests over the planning horizon. Specifically, this strategy has caused a significant increase in the number of lost travel demands over the planning horizon, with an average of lost travel demands multiplied by three compared to the “D-R-C-RAMoD-Fuzzy” strategy and multiplied by four compared to the “D-R-C-RAMoD-Perfect” strategy. This is also not surprising, as we can achieve significant performance gains by integrating rebalancing trips to ensure a balance between the number of available vehicles at each station and travel demands.
A considerable performance gain is attributed to the integration of rebalancing policies as part of the “D-C-RAMoD-Fuzzy” strategy and the fact that several passengers can share the same trip. Indeed, it can be seen that out of ten different experiments, the proposed strategy produces an optimal design for six experiments. It also generates solutions that are very close to the optimal plan for the other time periods, with a variance of 35%. These findings demonstrate the robustness of the proposed strategy for managing the fleet and meeting customer needs, even when travel demand forecasts are tainted by ambiguity.

The number of lost travel requests for each strategy as a function of time.
7 Conclusion
Despite the significant progress achieved in vehicle electrification and automation, the next decade’s aspirations for large-scale deployments of AMoD and RAMoD services in metropolitan cities are still threatened by two significant bottlenecks. First, due to several externalities, the travel demand forecasts are subject to significant uncertainties, thus resulting in excessive, if not prohibitive, delays for customers if dispatching and rebalancing decisions fail to address uncertainty on the travel forecasts. Moreover, the requirement to make additional trips for recharging electric vehicles and in some cases, a vehicle may need to wait to charge instead of transporting waiting customers can significantly affect the convenience of AMOD systems and reduce its impact in resolving urban congestion problems.
In order to target travel demand uncertainty, we suggest the exploitation of the fuzzy set theory. Indeed, while deterministic or stochastic formulations remain unable to capture vagueness in the critical data, fuzzy logic is widely agreed to be a key framework for describing and treating uncertainty. To address the second limitation, the paper suggests the integration of a smart charging process with dispatching and rebalancing decisions. The optimal coordination of such decisions proves its efficiency to establish optimal schedules for electric vehicles charging given travel demand forecasts.
Specifically, the problem is first formulated as a multi-objective possibilistic linear programming model incorporating two important conflicting goals simultaneously: minimizing transportation costs and improving customer satisfaction. The proposed Fuzzy model is then transformed into an equivalent multi-objective integer linear programming model by combining two appropriate strategies. In order to guarantee the obtaining of an efficient compromise solution, the weighted goal programming model is being exploited reducing the initial problem to a scalar formulation and allowing the decision-maker to define an aspiration level for each objective. Numerical experiments demonstrate that the proposed approach is tractable and practical to deal with real-sized problems and provides an effective tool for managing dispatching, rebalancing, and charging decisions in RAMoD systems.
This paper opens the field for numerous important directions for further research.
First, it is of great interest to study the inclusion of routing policies by designing a comprehensive road network with finite capacity (currently, the road network is modeled with infinite capacity). This research axis can also address congestion effects, thus leaving an important extension open to study the impact of the proposed strategies on overall congestion. Second, the proposed framework can be extended to address not only uncertain travel demand but also fluctuations of several other critical parameters such as transportation costs, the state of charge electric vehicles, vehicle availability, etc. Third, we currently examine the RAMoD system independently of other transportation systems, whereas, in practice, travel demand depends on the different transportation modes. Future studies will investigate the effect of RAMoD systems on passenger behavior and the optimal integration of autonomous vehicle fleets with public transport. Finally, it is of interest to investigate the couplings that could occur between the electric grid and the charging strategies of an electric-powered RAMoD fleet.
References
Could self-driving cars spell the end of ownership. http://www.wsj.com. Accessed 09 Oct 2020
Zadeh, L.A.: Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets Syst. 1(1), 3–28 (1978)
Khemiri, R., Expósito, E.: Fuzzy multi-objective optimization for ride-sharing autonomous mobility-on-demand systems. In: 15th International Conference on Software and Data Technologies, pp. 284–294. Lieusaint, Paris (2020)
Shen, W., Lopes, C.: Managing autonomous mobility on demand systems for better passenger experience. In: Chen, Q., Torroni, P., Villata, S., Hsu, J., Omicini, A. (eds.) PRIMA 2015. LNCS (LNAI), vol. 9387, pp. 20–35. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-25524-8_2
Alonso-Mora, J., Samaranayake, S., Wallar, A., Frazzoli, E., Rus, D.: On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment. Proc. Natl. Acad. Sci. 114(3), 462–467 (2017)
Levin, M.W., Kockelman, K.M., Boyles, S.D., Li, T.: A general framework for modeling shared autonomous vehicles with dynamic network-loading and dynamic ride-sharing application. Comput. Environ. Urban Syst. 64, 373–383 (2017)
Javanshour, F., Dia, H., Duncan, G.: Exploring the performance of autonomous mobility on-demand systems under demand uncertainty. Transportmetrica A Transp. Sci. 15(2), 698–721 (2019)
Zhang, R., Pavone, M.: Control of robotic mobility-on-demand systems: a queueing-theoretical perspective. Int. J. Robot. Res. 35(1–3), 186–203 (2016)
Iglesias, R., Rossi, F., Zhang, R., Pavone, M.: A BCMP network approach to modeling and controlling autonomous mobility-on-demand systems. Int. J. Robot. Res. 38(2–3), 357–374 (2019)
Baskett, F., Chandy, K.M., Muntz, R.R., Palacios, F.G.: Open, closed, and mixed networks of queues with different classes of customers. J. ACM 22(2), 248–260 (1975)
Kobayashi, H., Gerla, M.: Optimal routing in closed queueing networks. ACM SIGCOMM Comput. Commun. Rev. 13(2), 26 (1983)
Belakaria, S., Ammous, M., Sorour, S., Abdel-Rahim, A.: Optimal vehicle dimensioning for multi-class autonomous electric mobility on-demand systems. In: IEEE International Conference on Communications Workshops, pp. 1–6. IEEE, Kansas City (2018)
Rossi, F., Zhang, R., Hindy, Y., Pavone, M.: Routing autonomous vehicles in congested transportation networks: structural properties and coordination algorithms. Auton. Robot. 42(7), 1427–1442 (2018)
Salazar, M., Lanzetti, N., Rossi, F., Schiffer, M., Pavone, M.: Intermodal autonomous mobility-on-demand. IEEE Trans. Intell. Transp. Syst. 21(9), 3946–3960 (2019)
Zhang, R., Rossi, F., Pavone, M.: Model predictive control of autonomous mobility-on-demand systems. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 1382–1389. IEEE, Stockholm (2016)
Iglesias, R., Rossi, F., Wang, K., Hallac, D., Leskovec, J., Pavone, M.: Data-driven model predictive control of autonomous mobility-on-demand systems. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 1–7. IEEE, Brisbane (2018)
Tsao, M., Iglesias, R., Pavone, M.: Stochastic model predictive control for autonomous mobility on demand. In: 21st International Conference on Intelligent Transportation Systems (ITSC), pp. 3941–3948. IEEE, Hawaii (2018)
Tsao, M., Milojevic, D., Ruch, C., Salazar, M., Frazzoli, E., Pavone, M.: Model predictive control of ride-sharing autonomous mobility-on-demand systems. In: International Conference on Robotics and Automation (ICRA), pp. 6665–6671. IEEE, Montreal (2019)
Salazar, M., Rossi, F., Schiffer, M., Onder, C.H., Pavone, M.: On the interaction between autonomous mobility-on-demand and public transportation systems. In: 21st International Conference on Intelligent Transportation Systems (ITSC), pp. 2262–2269. IEEE, Maui (2018)
Jackson, J.R.: Networks of waiting lines. Oper. Res. 5(4), 518–521 (1957)
Zadeh, L.A.: Fuzzy sets. Inf. Control 8(3), 338–353 (1965)
Khemiri, R., Elbedoui-Maktouf, K., Grabot, B., Zouari, B.: A fuzzy multi-criteria decision-making approach for managing performance and risk in integrated procurement–production planning. Int. J. Prod. Res. 55(18), 5305–5329 (2017)
Ali, M.A.H., Lun, A.K.: A cascading fuzzy logic with image processing algorithm–based defect detection for automatic visual inspection of industrial cylindrical object’s surface. Int. J. Adv. Manuf. Technol. 102(1–4), 81–94 (2018). https://doi.org/10.1007/s00170-018-3171-7
Sarno, R., Sinaga, F., Sungkono, K.R.: Anomaly detection in business processes using process mining and fuzzy association rule learning. J. Big Data 7(1), 1–19 (2020). https://doi.org/10.1186/s40537-019-0277-1
Bagga, P., Joshi, A., Hans, R.: QoS based web service selection and multi-criteria decision making methods. Int. J. Interact. Multimedia Artif. Intell. 5(4), 113–121 (2019)
Pedrycz, W.: Why triangular membership functions? Fuzzy Sets Syst. 64(1), 21–30 (1994)
Dubois, D., Foulloy, L., Mauris, G., Prade, H.: Probability-possibility transformations, triangular fuzzy sets, and probabilistic inequalities. Reliable Comput. 10(4), 273–297 (2004)
Charnes, A., Cooper, W.W., Ferguson, R.O.: Optimal estimation of executive compensation by linear programming. Manag. Sci. 1(2), 138–151 (1955)
Kaucic, M., Barbini, F., Camerota Verdù, F.J.: Polynomial goal programming and particle swarm optimization for enhanced indexation. Soft. Comput. 24(12), 8535–8551 (2019). https://doi.org/10.1007/s00500-019-04378-5
Bakhtavar, E., Prabatha, T., Karunathilake, H., Sadiq, R., Hewage, K.: Assessment of renewable energy-based strategies for net-zero energy communities: a planning model using multi-objective goal programming. J. Clean. Prod. 272, 122886 (2020)
Ruben, C., Dhulipala, S.C., Bretas, A.S., Guan, Y., Bretas, N.G.: Multi-objective MILP model for PMU allocation considering enhanced gross error detection: a weighted goal programming framework. Electr. Pow. Syst. Res. 182, 106235 (2020)
Tornado Mobility-Fui Project. https://www.tornado-mobility.com/index.php/en/home-2/. Accessed 10 Nov 2020
Lai, Y.J., Hwang, C.L.: A new approach to some possibilistic linear programming problems. Fuzzy Sets Syst. 49(2), 121–133 (1992)
Wang, R.C., Liang, T.F.: Applying possibilistic linear programming to aggregate production planning. Int. J. Prod. Econ. 98(3), 328–341 (2005)
Liang, T.F.: Distribution planning decisions using interactive fuzzy multi-objective linear programming. Fuzzy Sets Syst. 157, 1303–1316 (2006)
Khemiri, R., Elbedoui-Maktouf, K., Grabot, B., Zouari, B.: Integrating fuzzy TOPSIS and goal programming for multiple objective integrated procurement-production planning. In: 22nd IEEE International Conference on Emerging Technologies and Factory Automation, pp. 1–8. IEEE, Limassol (2017)
Luhandjula, M.K.: Fuzzy optimization: an appraisal. Fuzzy Sets Syst. 30(3), 257–282 (1989)
Sakawa, M., Yano, H.: An interactive fuzzy satisficing method for multiobjective nonlinear programming problems with fuzzy parameters. Fuzzy Sets Syst. 30(3), 221–238 (1989)
Tanaka, H., Asai, K.: Fuzzy linear programming problems with fuzzy numbers. Fuzzy Sets Syst. 13(1), 1–10 (1984)
Tanaka, H., Ichihashi, H., Asai, K.: A formulation of linear programming problems based on comparison of fuzzy numbers. Control Cybern. 13, 185–194 (1984)
Hsu, H.M., Wang, W.P.: Possibilistic programming in production planning of assemble-to-order environments. Fuzzy Sets Syst. 119(1), 59–70 (2001)
Acknowledgment
This work is financed by national funds FUI 23 under the French TORNADO project focused on the interactions between autonomous vehicles and infrastructures for mobility services in low-density areas. Further details of the project are available at https://www.tornado-mobility.com/.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Khemiri, R., Naija, M., Exposito, E. (2021). Shared Autonomous Mobility on Demand: A Fuzzy-Based Approach and Its Performance in the Presence of Uncertainty. In: van Sinderen, M., Maciaszek, L.A., Fill, HG. (eds) Software Technologies. ICSOFT 2020. Communications in Computer and Information Science, vol 1447. Springer, Cham. https://doi.org/10.1007/978-3-030-83007-6_1
Download citation
DOI: https://doi.org/10.1007/978-3-030-83007-6_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-83006-9
Online ISBN: 978-3-030-83007-6
eBook Packages: Computer ScienceComputer Science (R0)