
Abstract
Over the last few years, a concept called Digital Twin has evolved rapidly as a new key approach in the field of Product Lifecycle Management (PLM). Briefly, a Digital Twin is a digital representation of an active unique product or unique product-service-system with its selected characteristics within dedicated lifecycle phases. This concept has experienced a tremendous impact by IoT technology, which has drastically reduced the costs. It builds the foundation not only for connected products and services but also for entirely new offerings and business models. Three main characteristics of Digital Twin were identified: representation of a physical system, bidirectional data exchange, and the connection along the entire lifecycle. For a better understanding, three subtypes of Digital Twin are presented, namely: The Digital Master, the Digital Manufacturing Twin, and the Digital Instance Twin which refer to the different phases of the product lifecycle: design, production and operation. Therefore, this chapter formulates a consistent and detailed definition of Digital Twins and gives insight in dedicated research direction. Finally, based on the Digital Twin characteristics, an approach for generation of Digital Twin in manufacturing is shown.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Digital twin
- Product lifecycle management
- Digital thread
- Digital master
- Digital manufacturing twin
- Digital instance twin
3.1 Introduction
In the past decade, the term Digital Twin was coined to describe the entire virtual representation of a physical system, process or service. In the beginning, Digital Twins were merely descriptive, but as computational, information and communication technologies evolved, a high-performance bidirectional coupling between the digital and the physical system was established [1]. Digital Twin was meant to improve competitiveness of the industry, especially in manufacturing, to meet challenges caused by volatile demand, even lower batch size and high cost pressure [2].
After few years of tremendous development, academia has recently announced the following definition of Digital Twin [3]: “A digital twin is a digital representation of an active unique product (real device, object, machine, service or intangible asset) or unique product service system (a system consisting of a product and a related service) that comprises its selected characteristics, properties, conditions and behaviours by means of models, information and data within a single or even across multiple lifecycle phases”.
The Digital Twin is based on an experiment-capable digital model, thus a simulation model. This model provides a virtual representation of the real system or object. Here, only those properties of the real system are mapped in the digital model that lead to accurate virtual representation of the system behaviour [4]. The specific system behaviour can therefore be abstracted and understood. With the digital model, it is possible to conduct analyses and evaluations that were previously solved either by expert knowledge or mathematical calculations [5]. However, since the digital model can be applied to integrate complex interdependencies, statistical distributions and scenarios into the investigations, new evaluation and analysis possibilities emerge. These potentials will be further enhanced if the digital model is extended to a Digital Twin [6]. This occurs in particular when the Digital Twin interacts with the real system [7]. As a result, analyses and evaluations become more reliable, faster, and the Digital Twin provides decision-making for complex planning and control problems [8]. The benefits of Digital Twin therefore lie in an increased accuracy and fidelity as well as decreased time and costs [9]. The workload in the process of creating real-time virtual representation or in the process of realising virtual descriptions in the physical system is also decreased [1].
Several new terms were used to indicate more specific approaches of Product Lifecycle Management (PLM) [10], like Digital Thread [11], Digital Shadow [5], and Digital Twin. These three terms are partially used as synonyms and hardly to distinguish. Digital Thread is the overarching term which comprises a continuous connection of all digital models over the entire product lifecycle phases and all involved IT systems and databases, enabling a traceability from requirements until retirement [11]. The Digital Shadow, in contrast, provides a similar approach to the Digital Twin [5]. However, the Digital Shadow is considered to be a digital model that is continuously updated by a connection to the real system. A data transmission to the real counterpart is not implemented. Therefore, the Digital Shadow is not able to intervene in a controlling way.
The key criterion for differentiation between these similar terms is the level of data integration [12]. Assumed the highest level of integration, the Digital Twin is a virtual dynamic representation of a physical system, which is connected to it over the entire lifecycle for bidirectional data exchange [13, 14]. The Digital Shadow, therefore, can be understood as a lower implementation level of the Digital Twin and the Digital Thread as an approach or method to accomplish the Digital Twin.
The reason why Digital Twins are becoming more and more endorsed by industry is primarily caused by their two characteristics: their ability to integrate large amounts of static, real-time, structured and unstructured data and to combine this data with advanced data processing methods such as artificial intelligence (AI) [15], machine learning (ML) [16, 17] or high-performance computing (HPC) [18] in order to provide simulation, control [19] and self-improvement [20].
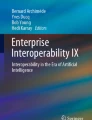
Hence, such an overwhelming term and definition needs a structure as subdimensions of the term Digital Twin. While this concept evolved from the field of PLM, the most helpful way would be a breakdown of the term according to the phases of the product lifecycle [21]. This is also in line with parts of the literature [9, 18]. Thus, the definition was split into three subtypes of Digital Twins—the Digital Master [22], the Digital Manufacturing Twin [23], and the Digital Instance Twin [24]. Digital Master addresses topics such as Functional DMU [25], function simulation [26], calibration and testing (Fig. 3.1, left) [27]. Digital Manufacturing Twin (Fig. 3.1, mid) encompasses topics such as Digital Factory [7], plant and layout planning [28], manufacturing planning [29], material flow planning [30], robotics [31] and digital approval [32]. Digital Instance Twin addresses topics such as predictive maintenance [14], real-time analysis [24] and process optimization [33] (Fig. 3.1, right).

The breakdown of the Digital Twin according to the phases of the product lifecycle [11]
Product Lifecycle Management combines different IT methods, architectures and systems in a uniform environment, with which products are accompanied from the first idea through development, prototyping and production to the end of use and recycling. PLM enables the continuous planning, analysis, simulation, and optimization of a product over the entire lifecycle [10]. Digital Twins leverage data from CAx systems, product lifecycle software, manufacturing systems, and sensors to create a realistic virtual model of the product, enabling prediction of performance, maintenance, and failures [34]. In such sense, PLM manages the Digital Twins. Nowadays, the products’ environmental impact could be diminished by improving various product-life stages using multiple sensors due to the Industrial Internet of Things (IIOT) [35]. This would allow for more respectable methods of consumption and allow pay-to-use and product-service systems to develop further. PLM and IIoT systems are subject of more advanced integration by using Digital Thread [36].
In particular and beyond the state-of-the-art, the concept of the Digital Twins offers opportunities for business-to-business (B2B) manufacturing companies to easier co-create and maintain Product-Service-Systems [37]. This allows much closer relationship with customers base over the lifecycle of the delivered solution. For this purpose, concepts of Digital Twin and real-time simulation support each other and in the background the transformation which should start in PLM [13].
In this chapter, essential properties of Digital Twin are discussed. In Sect. 3.2, the conception of Digital Twin is briefly discussed together with its achievement as recorded in the literature. In Sect. 3.3, the main expressions of Digital Twin in context of Industry 4.0 are presented, followed in Sect. 3.4 by simulations as a backbone of Digital Twin. In Sect. 3.5, a novel approach to create Digital Twin in a built environment based on scanned data is presented. The chapter ends with a summary and future challenges.
3.2 Taxonomy of Digital Twin
In the case of a fluid, broad term without a clear scientific definition such as Digital Twin, which is at the same time used both by academia and business, a taxonomy helps to jointly understand and classify the specified and implemented technical solution. A meaningful taxonomy of Digital Twin based on 122 recent journal papers was achieved through a systematic procedure after three iterations under fulfilment of 13 ending conditions [38]. After the classification of all objects during the literature research, a concise, robust, comprehensive, extendible, and explanatory taxonomy was derived, which consists of no repetitive dimensions or characteristics. Ultimately, eight dimensions with 18 corresponding characteristics remain, which are shown in Table 3.1.
The meta-characteristics defines the taxonomy’s purpose, the identification of the central, distinguishing features and properties of Digital Twins. During the development iterations, three non-mutually exclusive dimensions and five mutually exclusive dimensions were selected, as indicated in Table 3.1 [38]. Each dimension has two or three characteristics what supports clarity.
The dimension data link specifies how the communication between the Digital Twin and its physical counterpart takes place, which can either be one-directional or bi-directional. A Digital Twin can only obtain a one- or a bi-directional data link, which makes the dimension mutually exclusive [38].
The way of handling data by Digital Twin determines its overall purpose. It needs to be distinguished between three possible characteristics: processing data (1), such as monitoring, analysis, forecasting, or optimization; transfer data (2) from one point (e. g., the physical part) to another one (e.g., a data warehouse); data repository (3). A Digital Twin may have one, two or all three characteristics of this dimension at the same time. Thus, this dimension is not mutually exclusive [38].
The dimension conceptual elements describe the relationship between the Digital Twin and its physical counterpart. Whereas some authors describe a deep connection between the virtual and the physical part and some are stressing the point that the physical system is even an integral part of the whole Digital Twin, others see only a loose connection between a digital representation and its physical twin. Therefore, two characteristics for this dimension can be defined. Either a Digital Twin is directly bound to its physical part in a one-to-one ratio, or it is independent. If it is independent, a Digital Twin can be seen in combination with other physical systems or one system can possess multiple Digital Twins. This dimension is mutually exclusive [38].
Model accuracy concerns how the accuracy of the digital representation of the physical object is expressed: either by an identical accuracy or a partial accuracy. The former describes every detail of a physical object in its digital images. It is not distinguished whether a particular detail will be relevant for the task the Digital Twin has to perform or not. Contrary to this, partial model accuracy is applied when a digital image only reflects crucial parts of the physical object. The model accuracy is mutually exclusive as well [38].
The dimension interface concerns the capability of a Digital Twin to transfer data after it processes them. After some changes to this dimension, it can be concluded that a Digital Twin could possess a machine-to-machine interface or a human–machine interface. Multiple choices are possible here: a human–machine interface via augmented reality, a machine-to-machine interface to other models or both, a human–machine interface as well as a machine-to-machine interface. Therefore, this dimension is not mutually exclusive [38].
The dimension synchronization consists of two characteristics: a working synchronization between the Digital Twin and the physical part by (real-time) data updates during its lifecycle or without a synchronization at all. The synchronization is mutually exclusive [38].
The dimension data input differentiates between raw and processed data. Digital Twins receive their data from sensors or databases. Those data might be pure, raw data gathered directly from sensors or other data collection devices. In addition, data, which are pre-processed (e. g., by analytic software) before it is transferred to the Digital Twins, might be used. Data input is not mutually exclusive.
The time of creation distinguishes between three characteristics determining the chronological order in which the respective parts of the Digital Twin come into existence. Thus, the dimension distinguishes whether the physical part or the digital part is developed first, or both parts are developed simultaneously. Most Digital Twins are designed after a physical system [38].
3.3 Conception of Digital Twin
In this section, a brief conception is sketched of the main expressions of Digital Twin in the past years. First, main subtypes of Digital Twins related to specific domains and phases of product lifecycle are described.
3.3.1 Digital Master
The Digital Master enables the enterprise to collect, maintain and provide all system information at a dedicated point in time to all actors. Downstream process can access this product information for their dedicated needs. Digital Master baselines allow traceability for all system elements. Basically, the digital master replaces a document-based approach in the development of complex products, which enables modern organization to share product data with downstream processes (Fig. 3.2). Digital master models are a set of linked data records in self-contained document that provide a defined degree of maturity across the product lifecycle [19].

Digital master with an application [19]
3.3.2 Digital Manufacturing Twin
Digital Manufacturing Twin is a highly accurate virtual model of the manufacturing process of a product. These models are used to simulate real-world conditions prior to generating a product or developing manufacturing operations, with the goal of optimising as much as possible in software, where multiple use cases and operation conditions are evaluated inexpensively [7].
Based on data from the digital thread, Digital Twin is constantly updated for maximum accuracy and high fidelity. By collecting information from real-life manufacturing processes, manufacturing simulations can be improved and updated, resulting in more efficient manufacturing processes (Fig. 3.3) [39]. Digital Twins are also an excellent means to capture, maintain and replicate manufacturing best practices.

Digital manufacturing twin [11]
3.3.3 Digital Instance Twin
The Digital Instance Twin (DIT) provide access to the product along the full post-production lifecycle (right column in Fig. 3.1). DIT is created at the end of production or delivery and may hold a copy of some of Digital Manufacturing data such as the product’s configuration. If multiple instances of the same type of assets (e.g. a wind turbine) are being monitored, each of them is considered as a single Digital Instance Twin. In some sense, an aggregate of twins can be collected where similar patterns or trends can be found to optimize the operation and refine models for higher fidelity in the future (Fig. 3.4).

Digital instance twin [11]
In this way, the digital twin ecosystem is created with a central, comprehensive platform and the potential to build up several use cases and innovative business models [40].
Digital Instance Twin is used to facilitate maintenance of an operating aircraft based on its lifelong collected data. Furthermore, experts located at different sites can join via a virtual session. By inspecting a 3D model of the aircraft component, they can see synchronized information from a Digital Twin database. With Augmented Reality glasses, the Microsoft HoloLens, a Digital Twin can be experienced personally. In the inspector's view, the 3D model of the Digital Twin is directly superimposed on the physical component. This Mixed Reality Vision can be used for inspection purposes. Any inspection related information can be directly attached to the component. to maintain the continued airworthiness of the aircraft and prevent a failure [24].
3.4 Main Expressions of Digital Twin in Context of Industry 4.0
In the era of Industry 4.0, the question arises as to how Digital Twin is positioned for this industrial initiative. Within Industry 4.0 Reference Architecture Model (RAMI 4.0) [41], Digital Twin is primarily assigned to the Lifecycle & Value stream axis in order to provide the horizontal integration within the product lifecycle (Fig. 3.5) as described in Sect. 3.2. Digital Twin is literally floating in the solution space of RAMI 4.0 because the assignment to the axes Hierarchy Level and Layer is much less clear [41]. Basically, Digital Twin remains related to Product and Asset in context of Industry 4.0. In this sense, a precise description of Digital Twin remains difficult [42].

Digital Twin in context of RAMI 4.0 [41]
In order to better classify Digital Twin, it must be clarified which of the following 8 hypotheses apply [42]:
-
1.
Digital Twin is a digital representation of an asset.
-
2.
Digital Twin is in several places at the same time.
-
3.
Digital Twin has a variety of states.
-
4.
In an interaction situation, Digital Twin has a context-specific state.
-
5.
The information model for Digital Twin is infinitely large, it is a real information model.
-
6.
The real information model can finitely be approximated for a specific application scenario and thus becomes a rational information model.
-
7.
The rational information model cannot be stored in one place.
-
8.
The rational information model is never fully visible.
An asset is an object of value. What an asset is specifically for a specific application scenario depends on the application scenario. Whether this object is tangible or intangible, a product or a production system, a type or an instance, is irrelevant. Digital Twin becomes visible at several locations at the same time along the product lifecycle and interacts with an actuator (human, machine, etc.) at these locations [43]. As an outcome, Digital Twin has a variety of states depending on locations and timeline. Digital Twin is put into a context-specific state in a concrete interaction situation. In order to be able to interact with Digital Twin in a specific application scenario, an approximate information model must exist. We refer to this, again based on mathematics, as the rational information model. As can be seen in Fig. 3.1, the data of the rational information model is distributed along the product lifecycle. They are not stored in one container, for example in a central database. In order to feed the data required for a specific interaction situation to a specific actuator, this data must be transported via a suitable interface infrastructure. Consequently, all data of the rational information model are never completely visible [42]. Therefore, an adequate specialization and conscious reduction of Digital Twin to specific application cases remains inevitable, especially if a desired, limited implementation period is taken into account [44].
3.5 Simulations as the Backbone of the Digital Twin
In the following explanations, the Digital Twin of a production system is always referred to. Thus, the investigation relates to processes within a production, which means that the behaviour of the system is mapped. This behaviour manifests itself through production processes, in particular production, handling, setup, inventory and transport. The product that is produced in the system is described by properties that relate to the process. Therefore, a difference to other types of Digital Twins can be seen here, for example, in that the geometric shape of the product is of minor importance [45]. At this point, information about the product is relevant for the investigations, such as processing times, set-up times, space requirements, batch size, etc. Further important entities to describe the behaviour of a production system are [46]:
-
Machine tools
-
Robots
-
Workers
-
Workstations
-
Storage and buffers
-
Paths and transport routes
-
Transport devices
-
Conveyors
-
Load carriers
This is a superordinate classification of the relevant parameters. The various parameters that are further relevant for the Digital Twin of a production system are discussed in Chap. 9 of this book.
Simulations are therefore used to reproduce the behaviour of a production system in the virtual environment. The simulations thus form the backbone for the Digital Twin. The definition of simulation is the reproduction of a dynamic process in a system by means of an experimental model in order to gain knowledge that can be transferred to reality [47]. Thereby, the model represents the object and the system in a simplified form and under consideration of a concrete purpose [48].
When applied to production processes in industrial companies, the real production system is transferred into a simplified model, which can be used to simulate the dynamic behaviour and complex interactions of the production system [49]. Simulation of a production system is thus a key component of the digital model, Digital Shadow and Digital Twin, if they are supposed to represent a production system virtually.
More precisely specified, discrete event simulation methods, also called Discrete Event Simulation (DES), are usually used. In this method, system states are changed at certain points in time, so that the sequence of this simulation is defined. This form of simulation is common for simulations of production systems, which results in a relatively low calculation effort [48]. Figure 3.6 illustrates how the simulation supports Digital Twin as well as Digital Shadow and digital Model. Depending on which technology of the three is applied, a different exchange with the physical production system is performed. With the digital model, the model is built up once or adjusted as required and selectively. With the help of the simulation, analyses are executed, which in turn are applied as findings for the real model. The digital model can also be seen as a synonym for DES at this point. Unlike the digital model, the Digital Shadow is continuously supplied with up-to-date data from the physical production system [50]. Accordingly, a data link is required, but this is only one-way from the real system to the simulation model. In contrast, the Digital Twin extends this concept by a further data connection to the real system [51].

Simulation for Digital Twin, Digital Shadow and Digital Model
Many fields of application exist today for simulation models of a production system, e.g. planning of factory plants, layout optimization in the shop floor, approval processes in the area of reconstruction and fire protection, optimization of production processes and material transport. A detailed description of the applications is given in the book in Chap. 9. According to Wenzel et al. [52], simulation in particular is a core element of the digital factory and is becoming increasingly important as a result of developments in the area of digitization. Simulation in production and logistics has been scientifically investigated and established for a long time (e.g. [53,54,55]). According to Nyhuis et al. [56], their use supports companies in optimising logistical targets, e.g. with regard to adherence to schedules, throughput times, performance, inventory and costs. The benefits in the area of material flow planning are rated by companies as high or very high [57].
Nevertheless, current studies prove that the use of simulation models for production systems in small and medium-sized enterprises is still not standard [58]. The main reasons for this backlog are the following organizational and technical obstacles [58,59,60]:
-
1.
Non-transparent procurement costs (e. g. due to manual or inefficient creation of Digital Twin).
-
2.
Required IT expertise too high (e. g. due to inefficient or overly expensive services).
-
3.
Unpredictable operating expenses (e. g. due to manual or inefficient adaptation of Digital Twin).
-
4.
Lack of knowledge regarding available simulation tools and application areas as well as the achievable benefits.
In the following an approach to overcome these obstacles is presented.
3.6 Proposed Approach
With this research, an approach for the automated generation of a Digital Twin in manufacturing in a built environment based on scans and object recognition is investigated to provide a basis for various optimizations in the production process [61]. Usually, if a Digital Twin is currently being created, this is done by one or more people with the appropriate IT expertise. In addition, the required information is made available to these persons, for example layout plans of the production hall, machine lists, product data and so on. This process requires a high manual effort, which among other things results from the fact that specific knowledge and information from production must be transferred to the area of software development. During this domain transition, increased effort is required for coordination, transformation and error prevention.
Figure 3.7 illustrates the functional scheme of the novel approach. In general, the generation of the Digital Twin is shortened and simplified by distinguishing between three parameter groups. With the distinction into three groups, the structure described above is broken down by implementing an efficient data acquisition procedure for each parameter group. With this procedure it is possible to automate the creation of the Digital Twin in many places, to standardize the transformation of the information, and thus to obtain an efficient and cost-effective creation process [62].

Proposed approach for Digital Manufacturing Twin in the built environment
The first parameter group consists of spatial information, which is recorded by a scan. For the scanning process, several procedures, such as photogrammetry and laser scanning, are generally conceivable, depending on specific characteristics of the production system and the building [63]. A detailed point cloud is generated by the scanning [64]. This point cloud is the basis for the next steps and at the same time the overall layout of the hall and the positions of the individual objects in the digital model are created [65]. The details about the scanning process are explained in the fourth chapter of this book.
The second parameter group contains the objects of production. The procedure to collect the required information is based on the scan, where object recognition identifies the entities of a production, such as machines or routes [66]. The objective is to recognize all visible objects of the production and to include them automatically into the digital model. For object recognition, methods of artificial intelligence are utilized [67]. All details about this process are explained in Chaps. 5–8.
Finally, the third group is all company-specific information that describes the production processes, such as linkages, sequencing, buffer and so on. This information cannot be automatically acquired via a scan and is usually different for every company. This expert knowledge and the company-specific information of the production system need to be acquired by forms or expert interviews and inserted in the simulation modelling process [68]. It is also conceivable that data could be taken directly from IT systems. Further descriptions of the third parameter group can be found in Chap. 9.
By using the taxonomy as presented in Sect. 3.2, the following classification of this approach can be provided. With regard to data link, this Digital Twin is uni-directional. Dimension purpose is for data transfer und repository. Dimension accuracy is partial (e. g., adjustable according to the process requirements). Dimension interface is machine-to-machine. Synchronization between the physical and the digital part is not existent. Data input is fed with raw data. Time of creation id pre-defined by the built environment: the physical part first.
Apart of the use of the related taxonomy, a differentiation from the term Digital Mock-up (DMU) is useful [69]. In summary, DMU and Digital Twin, as two aspects that define ideal products and physical products, can be organically unified, as shown in Fig. 3.8. The merge of DMU and Digital Twin reflects the high integration of cyberspace, physical space, and consciousness space. In this view, DMU can be understood as the basis or the previous stage of Digital Twin. Therefore, Digital Twins will become the”middleware” for in-depth communication between human and machine [70].

The relationship between DMU and Digital Twin [70]
3.7 Summary and Further Research
The Digital Twin offers great potential for manufacturing companies [71]. Research in this field has increased rapidly in recent years and more and more applications can be found in practice [72]. Nevertheless, the technology of the Digital Twin does not yet infuse the entire industry due to the lack of applications for specific scenarios and difficult implementation [73].
In this chapter, the different types of Digital Twins in manufacturing companies were first described. An important distinction here is that in the following the Digital Twin is addressed by production systems: Digital Manufacturing Twin [74]. At this point, the simulation of manufacturing processes is the basis for the investigations. With the simulation, which is connected to the real production system via data interfaces, the technology of the Digital Twin is made available [75]. A particular importance is dedicated the built environment where no or not complete or not exact 3D documentation is available [76].
Since advanced IT expertise is required to generate the Digital Twin and its creation or benefits remain unclear to many companies, the Digital Twin has not yet achieved greater diffusion in industry [77]. To overcome these obstacles, a novel approach to create a Digital Manufacturing Twin in a built environment is presented. Here, a flexible, cost-effective and efficient approach is applied with fast scans of the factory floor, object recognition and a highly automated simulation model construction. The further explanations in this book will go through the details of this approach. As the outcome of this approach, production planner gets a powerful means to optimize the production processes in the built environment. Intermediate results can be used for layout planning, construction progress control and documentation purposes [78].
References
Trauer J, Schweigert-Recksiek S, Engel C, Spreitzer K and Zimmermann M (2020) What is a Digital Twin? Definitions and insights from an industrial case study in technical product development. Int Design Conf Design 2020. https://doi.org/10.1017/dsd.2020.15
Sieg O, Völl, C (2020) Digital twin and Product Lifecycle Management (PLM) as part of the corporate strategy [Digital Twin und PLM als Teil der Unternehmensstrategie]. ZWF Zeitschrift fuer Wirtschaftlichen Fabrikbetrieb 115:38
Stark R, Damerau T (2019) Digital Twin. In: Chatti S, Laperrière L, Reinhart G, Tolio T (eds) The international academy for production engineering. CIRP encyclopedia of production engineering, 2nd edn. Springer, Berlin Heidelberg. https://doi.org/10.1007/978-3-642-35950-7_16870-1
Lo CK, Chen CH, Zhong RY (2021) A review of Digital Twin in product design and development. Adv Eng Inform
Ríos J, Morate FM, Oliva M, Hernández JC (2016) Framework to support the aircraft digital counterpart concept with an industrial design view. Int J Agile Syst Manage 9(3):212–231. https://doi.org/10.1504/IJASM.2016.079934
Ladj A, Wang Z, Meski O, Belkadi F, Ritou M, Da Cunha C (2020) A knowledge-based Digital Shadow for machining industry in a Digital Twin perspective. J Manuf Syst. https://doi.org/10.1016/j.jmsy.2020.07.018
Weber U, Hong NA, Schäfer V, Peters P, Vettermann S (2015) Synced factory Twins: next lever digital manufacturing. ProduktDataJournal 2(2015):8–13
Biesinger F, Meike D, Kraß B, Weyrich M (2018) A case study for a digital twin of body-in-white production systems—general concept for automated updating of planning projects in the digital factory. In: 23rd international conference on emerging technologies and factory automation (ETFA). IEEE, pp 19–26. https://doi.org/10.1109/ETFA.2018.8502467
Donoghue I, Hannola L, Papinniemi J, Mikkola A (2018) The benefits and impact of digital twins in product development phase of PLM. In: Chiabert P, Bouras A, Noël F, Ríos J (eds) PLM 2018: product lifecycle management to support industry 4.0. Springer International Switzerland, pp 432–441. https://doi.org/10.1007/978-3-030-01614-2_40.
Stark J (2015) Product lifecycle management, vol 1. Springer International Publishing, Switzerland. https://doi.org/10.1007/978-3-319-17440-2
Wagner L (2020) Kein Digital Twin ohne digitale Durchgängigkeit. Zeitschrift für den wirtschaftlichen Fabrikbetrieb, Band 115, April 2020, pp 43–45. https://doi.org/10.3139/104.112315
da Silva Serapião Leal G, Guédria W, Panetto H (2019) An ontology for interoperability assessment: a systemic approach. J Indus Inform Integr 16:100100. https://doi.org/10.1016/j.jii.2019.07.001
Ruppert T, Abonyi J (2020) Integration of real-time locating systems into digital twins. J Indus Inform Integr 20:100174. https://doi.org/10.1016/j.jii.2020.100174
El-khoury J, Berezovskyi A, Nyberg A (2019) An industrial evaluation of data access techniques for the interoperability of engineering software tools. J Indus Inform Integr 15(2019):58–68. https://doi.org/10.1016/j.jii.2019.04.004
Haenlein M, Kaplan A, Tan CW, Zhang P (2019) Artificial intelligence (AI) and management analytics. J Manage Anal 6(4):341–343. https://doi.org/10.1080/23270012.2019.1699876
Schmitt J, Bönig J, Borggräfe T, Beitinger G, Deuse, J (2020) Predictive model-based quality inspection using machine learning and edge cloud computing. Adv Eng Inform 45:101101. https://doi.org/10.1016/j.aei.2020.101101
Li C, Zhang S, Qin Y, Estupinan E (2020) A systematic review of deep transfer learning for machinery fault diagnosis. Neurocomputing 407:121–135. https://doi.org/10.1016/j.neucom.2020.04.045
Voell C, Chatterjee P, Rauch A, Golovatchev J (2018) How Digital Twins enable the next level of PLM: a guide for the concept and the implementation in the internet of everything era. In: Chiabert P et al. (eds) Product lifecycle management to support industry 4.0. Springer International, Cham, pp 238–249. https://doi.org/10.1007/978-3-030-01614-2_22.
Xu J, Guo T (2021) Application and research on digital twin in electronic cam servo motion control system. Int J Adv Manuf Technol 112:1145–1158. https://doi.org/10.1007/s00170-020-06553-7
Martínez GS, Sierla SA, Karhela TA, Lappalainen J, Vyatkin V (2018) Automatic generation of a high-fidelity dynamic thermal-hydraulic process simulation model from a 3D plant model. IEEE Access 6:45217–45232. https://doi.org/10.1109/ACCESS.2018.2865206
Gehrke I, Schauss M, Küsters D, Gries T (2020) Experiencing the potential of closed-loop PLM systems enabled by industrial internet of things. Procedia Manuf 45:177–182. https://doi.org/10.1016/j.promfg.2020.04.091
Biahmou A, Emmer C, Pfouga A, Stjepandić J (2016) Digital master as an enabler for industry 4.0. Adv Transdisciplinary Eng 4:672–681. https://doi.org/10.3233/978-1-61499-703-0-672
Sommer M, Stjepandić J, Stobrawa S, von Soden M (2019) Automatic generation of digital twin based on scanning and object recognition. Adv Transdisciplinary Eng 10(2019):645–654. https://doi.org/10.3233/ATDE190174
Utzig S, Kaps R, Azeem SM, Gerndt A (2019) Augmented reality for remote collaboration in aircraft maintenance tasks. 2019 IEEE aerospace conference. https://doi.org/10.1109/AERO.2019.8742228
Fukuda S, Lulić Z, Stjepandić J (2013) FDMU-functional spatial experience beyond DMU? In: Proceedings of the 20th ISPE international conference on concurrent engineering, CE 2013. IOS Press, Amsterdam, 2013, pp 431–440. https://doi.org/10.3233/978-1-61499-302-5-431
Yao J, Zhang Z (2020) C3+ATO function simulation and verification analysis based on timed automata. Adv Transdisciplinary Eng 14:166–173. https://doi.org/10.3233/ATDE200229
Peng Y, Zhao S, Wang H (2021) A digital twin based estimation method for health indicators of DC-DC converters. IEEE Trans Power Electron 36(2):9141430. https://doi.org/10.1109/TPEL.2020.3009600
Besbes M, Zolghadri M, Costa Affonso R, Masmoudi F, Haddar M (2020) 3D facility layout problem. J Intell Manuf. https://doi.org/10.1007/s10845-020-01603-z
Usuga Cadavid JP, Lamouri S, Grabot B, Pellerin R, Fortin A (2020) Machine learning applied in production planning and control: a state‑of‑the‑art in the era of industry 4.0. J Intell Manuf. https://doi.org/10.1007/s10845-019-01531-7
Donhauser T, Endter U, Schmidt T, Baier L, Schuderer P, Franke J (2020) Real-time image of production. Material flow simulation during operation | [Betriebsbegleitende materialflusssimulationechtzeitabbild der produktion]. WT Werkstattstechnik 110(4):214–219
He B, Cao X, Hua Y (2021) Data fusion-based sustainable digital twin system of intelligent detection robotics. J Cleaner Prod 280:124181. https://doi.org/10.1016/j.jclepro.2020.124181
Uhlenbrock L, Jensch C, Tegtmeier M, Strube J (2020) Digital twin for extraction process design and operation. Processes 8(7):866. https://doi.org/10.3390/pr8070866
Wallis R, Stjepandic J, Rulhoff S, Stromberger F, Deuse J (2014) Intelligent utilization of digital manufacturing data in modern product emergence processes. Adv Transdisciplinary Eng 261–270. https://doi.org/10.3233/978-1-61499-440-4-261
Lu Y, Xu X (2019) Cloud-based manufacturing equipment and big data analytics to enable on-demand manufacturing services. Robot Comput Integr Manuf 57:92–102. https://doi.org/10.1016/j.rcim.2018.11.006
Peruzzini M, Stjepandić J (2018) Editorial to the special issue “Transdisciplinary analytics in supply chain management.” J Manage Anal 5(2):75–80. https://doi.org/10.1080/23270012.2018.1443405
Barrios P, Eynard B, Danjou C (2018) Towards a digital thread between industrial internet of things and product lifecycle management: experimental work for prototype implementation. In: Chiabert P et al. (eds) Product lifecycle management to support industry 4.0. Springer International, Cham, pp 273–282. https://doi.org/10.1007/978-3-030-42250-9_26
Barata J, Pereira V, Coelho M (2020) Product biography information system: a lifecycle approach to Digital Twins. IEEE Trans Syst Man Cybern Syst 899–904. https://doi.org/10.1109/SMC42975.2020.9283061
van der Valk H, Haße H, Möller F, Arbter M, Henning JL, Otto B (2020) A taxonomy of Digital Twins. In: Anderson B, Thatcher J, Meservy R (eds) Proceedings of the 26th Americas conference on information systems, pp 1–10
Bicocchi N, Cabri G, Mandreoli F, Mecella M (2019) Dynamic digital factories for agile supply chains: an architectural approach. J Indus Inform Integr 15:111–121. https://doi.org/10.1016/j.jii.2019.02.001
Xu Y, Päivärinta T, Kuvaja P (2020) Digital Twins as software and service development ecosystems in industry 4.0: towards a research agenda. Communications in computer and information science, 1210 CCIS, pp 51–64. https://doi.org/10.1007/978-981-15-7530-3_5
DIN SPEC 91345 (2016) Referenzarchitekturmodell Industrie 4.0 (RAMI4.0). Deutsches Institut für Normung (DIN) e.V. https://doi.org/10.31030/2436156
Deuter A, Pethig F (2019) The Digital Twin theory—Eine neue Sicht auf ein Modewort. Industrie 4.0 Management 35(1):27–30. https://doi.org/10.30844/I40M_19-1_S27-30
Ma X, Tao F, Zhang M, Wang T, Zuo Y (2019) Digital twin enhanced human-machine interaction in product lifecycle. Procedia CIRP 83:789–793. https://doi.org/10.1016/j.procir.2019.04.330
Adamenko D, Kunnen S, Pluhnau R, Loibl A, Nagarajah A (2020) Review and comparison of the methods of designing the Digital Twin. Procedia CIRP 91:27–32. https://doi.org/10.1016/j.procir.2020.02.146
Lu Q, Chen L, Li S, Pitta M (2020) Semi-automatic geometric digital twinning for existing buildings based on images and CAD drawings. Autom Construct 115:103183. https://doi.org/10.1016/j.autcon.2020.103183
Denkena B, Dittrich M-A, Stobrawa S, Stjepandic J (2019) Automated generation of a digital twin using scan and object detection for data acquisition, 18. ASIM Fachtagung: Simulation in Produktion Und Logistik, Wissenschaftliche Scripten, Auerbach, pp 49–58
VDI-Richtline 3633, Blatt 1 (2014) Simulation von Logistik-, Materialfluss- und Produktionssystemen - Grundlagen. Beuth, Berlin
Gutenschwager K, Rabe M, Spieckermann S, Wenzel S (2017) Simulation in Produktion und Logistik - Grundlagen und Anwendungen. Springer Vieweg, Wolfenbüttel,. https://doi.org/10.1007/978-3-662-55745-7
Emmer C, Fröhlich A, Stjepandić J (2013) Advanced engineering visualization with standardized 3D formats, IFIP advances in information and communication technology, vol 409. Springer, Berlin Heidelberg, pp 584–595. https://doi.org/10.1007/978-3-642-41501-2_58
Pfouga A, Stjepandić J (2018) Leveraging 3D geometric knowledge in the product lifecycle based on industrial standards. J Comput Des Eng 5(1):54–67. https://doi.org/10.1016/j.jcde.2017.11.002
Ktari A, El Mansori M (2020) Digital twin of functional gating system in 3D printed molds for sand casting using a neural network. J Intell Manuf. https://doi.org/10.1007/s10845-020-01699-3
Wenzel S, Peter T (2017) Prozess-Simulation in kleinen und mittleren Unternehmen mittels des Bausteinkastensystems KMUSimMetall. Simul Produktion und Logistik 2017:433–442
Spieckermann S (2005) Diskrete, ereignisorientierte Simulation in Produktion und Logistik - Herausforderungen und Trends. Simulation und Visualisierung 2005 - SimVis. SCS Publishing House, Erlangen, pp 3–14
Rabe M, Spieckermann S, Wenzel S (2008) Verifikation und Validierung für die Simulation in Produktion und Logistik: Vorgehensmodelle und Techniken. Springer, Berlin,. https://doi.org/10.1007/978-3-540-35282-2
Wenzel S, Weiß M, Collisi-Böhmer S, Pitsch H, Rose O (2007) Qualitätskriterien für die Simulation in Produktion und Logistik: Planung und Durchführung von Simulationsstudien. Springer-Verlag. https://doi.org/10.1007/978-3-540-35276-1
Nyhuis P, Wiendahl HP (2012) Logistische Kennlinien: Grundlagen, Werkzeuge und Anwendungen. Springer, Berlin. https://doi.org/10.1007/978-3-540-92839-3
Bierschenk S, Ritter A, Kuhlmann T (2005) Stand der Digitalen Fabrik bei kleinen und mittelständischen Unternehmen. Fraunhofer-IRB-Verlag
Bischoff J et al. (2015) Erschließung der Potenziale der Anwendungen von, „Industrie 4.0“ im Mittelstand. Studie im Auftrag des Bundesministeriums für Wirtschaft und Energie (BMWi). Mülheim an der Ruhr
Denkena B, Winter F, Hauck S (2016) Anlernen von ablauforientierten simulationsmodellen. Productivity 21(3):52–54
Weissman A, Wegerer S (2019) Unternehmen 4.0: Wie Digitalisierung Unternehmen & Management verändert. In: Erner M (eds) Management 4.0—Unternehmensführung im digitalen Zeitalter. Springer-Verlag, Berlin, pp 43–78. https://doi.org/10.1007/978-3-662-57963-3_2
Sommer M, Stjepandić J, Stobrawa S, von Soden M (2021) Automated generation of a Digital Twin in manufacturing for a built environment using scan and object detection. J Indus Inform Integr (in press)
Denkena B, Dittrich MA, Stobrawa S, Stjepandić J (2020) Efficient generation of a digital twin using object detection for data acquisition and XML-interface for model creation. Procedia CIRP 93:274–279. https://doi.org/10.1016/j.procir.2020.03.016
Moon D, Chung S, Kwon S, Seo J, Shin J (2019) Comparison and utilization of point cloud generated from photogrammetry and laser scanning: 3D world model for smart heavy equipment planning. Autom Construct 98:322–331. https://doi.org/10.1016/j.autcon.2018.07.020
Wang K, Kim M-K (2019) Applications of 3D point cloud data in the construction industry: a fifteen-year review from 2004 to 2018. Adv Eng Inform 39:306–319. https://doi.org/10.1016/j.aei.2019.02.007
Ma Z, Liu S (2018) A review of 3D reconstruction techniques in civil engineering and their applications. Adv Eng Inform 37:163–174. https://doi.org/10.1016/j.aei.2018.05.005
Bondar S, Salem B, Stjepandić J (2018) Indoor object reconstruction based on acquisition by low-cost devices. Adv Transdisciplinary Eng 7(2018):113–122. https://doi.org/10.3233/978-1-61499-898-3-113
Salem B, Stjepandić J, Stobrawa S (2019) Assessment of methods for industrial indoor object recognition. Adv Transdisciplinary Eng 10:390–399. https://doi.org/10.3233/ATDE190145
Denkena B, Stobrawa S, Sommer M, Stjepandic J, Von Soden M (2020) Production planning using the digital twin | [Effiziente Erstellung eines digitalen Zwillings zur Verwendung im Produktionsmanagement; Produktionsplanung mit dem digitalen Zwilling]. WT Werkstattstechnik 110(10):661–665
Dai S, Zhao G, Yu Y, Bao Q (2020) The evolution from digital mock-up to Digital Twin. Front Artif Intell Appl Mach Learn Artif Intell 332:184–191. https://doi.org/10.3233/FAIA200781
Riascos R, Levy L, Stjepandić J, Fröhlich A (2015) Digital mock-up. In: Stjepandic J et al. (eds) Concurrent engineering in the 21st century: foundations, developments and challenges, Springer International Switzerland, pp 355–388
Schleich B, Dittrich MA, Clausmeyer T, Damgrave R, Erkoyuncu JA, Haefner B, de Lange J, Plakhotnik D, Scheidel W, Wuest T (2019) Shifting value stream patterns along the product lifecycle with digital twins. Procedia CIRP 86:3–11. https://doi.org/10.1016/j.procir.2020.01.049
Redelinghuys AJH, Basson AH, Kruger K (2019) A six-layer architecture for the digital twin: a manufacturing case study implementation. J Intell Manuf. https://doi.org/10.1007/s10845-019-01516-6
Hong Lim KY, Zheng P, Chen CH (2019) A state-of-the-art survey of Digital Twin: techniques, engineering product lifecycle management and business innovation perspectives. J Intell Manuf. https://doi.org/10.1007/s10845-019-01512-w
Polini W, Corrado A (2021) Digital twin of stone sawing processes. Int J Adv Manuf Technol 112:121–131. https://doi.org/10.1007/s00170-020-06384-6
Zhong RY, Ge W (2018) Internet of things enabled manufacturing: a review. Int J Agile Syst Manage 11(2):126–154. https://doi.org/10.1504/IJASM.2018.092545
Guo H, Zhu Y, Zhang Y, Ren Y, Chen M, Zhang R (2021) A digital twin-based layout optimization method for discrete manufacturing workshop. Int J Adv Manuf Technol 112:1307–1318. https://doi.org/10.1007/s00170-020-06568-0
Kritzinger W, Karner M, Traar G, Henjes J, Sihn W (2018) Digital Twin in manufacturing: a categorical literature review and classification. IFAC-PapersOnLine 51(11):1016–1022. https://doi.org/10.1016/j.ifacol.2018.08.474
Otero R, Lagüel S, Garrido I, Arias P (2020) Mobile indoor mapping technologies: a review. Autom Construct 120:103399. https://doi.org/10.1016/j.autcon.2020.103399
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Stjepandić, J., Sommer, M., Stobrawa, S. (2022). Digital Twin: A Conceptual View. In: Stjepandić, J., Sommer, M., Denkena, B. (eds) DigiTwin: An Approach for Production Process Optimization in a Built Environment. Springer Series in Advanced Manufacturing. Springer, Cham. https://doi.org/10.1007/978-3-030-77539-1_3
Download citation
DOI: https://doi.org/10.1007/978-3-030-77539-1_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-77538-4
Online ISBN: 978-3-030-77539-1
eBook Packages: EngineeringEngineering (R0)