
Abstract
Exoskeletons can support workers on physically demanding tasks, but in industry they lack of acceptance. This contribution gives an insight into design aspects for upper body exoskeletons, especially how active exoskeletons for industrial applications differ from military and medical use-cases. To overcome typical rigid exoskeleton problems, we suggest the use of modular soft-exosuit support systems and therefore checked different types of soft actuation principles for their eligibility for the use on upper body joints. Most promising approach is using two-layered actuators sting of robust fabric with embedded rubber tubes as pressure chambers. By inflating the tubes, it is possible to vary the stiffness of the chambers, which can be effectively used to generate assisting forces and moments at human joints (shoulder, elbow, wrist, finger).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


1 Introduction
Physically demanding manual tasks in manufacturing, logistics, handcraft and service are major contributors to early damage of the musculoskeletal system (approx. 19% of all work disabilities) and especially the spine (approx. 47% of muscoskeletal disabilities) [1] and are responsible for a loss of the gross domestic product of approximately 1% [2]. For military and rehabilitation use-cases, exoskeletons already showed that wearable systems support the muscle activity of the wearer. Nevertheless, the criteria differ largely from industrial applications (requirements for plug&play behaviour and longtime wear) and first rigid exoskeletons in assembly lines often suffer on the wearers acceptance [3]. As a result, the exoskeleton-market nowadays is mainly restricted to passive exoskeletons [4], which are practical, individually adaptive, not power restricted and much cheaper than their active counterparts. But, active exoskeletons suit the flexibility required by industrial environments more, which opens a wider industrial acceptance if the focus of the classical design-principles of exoskeletons will shift to more medically dominated topics like effects of long-term wear and ergonomics.
2 Development Aspects
From [5, 6] and discussions with medical officers, works council, end users and management from our project partner from the automotive industry, we found the main barriers for integrating exoskeletons in industrial environments in an often not considered variety of restrictions. Those are mainly driven by economical aspects, medical concerns as well as issues concerning the level of comforts. Table 1 gives a comprehensive overview of the factors identified together with a qualitative evaluation on existing basic exoskeleton types. Rigid active exoskeleton, which are well suited for rehabilitation and military applications, would be mostly in contrast with these factors, while soft-robotic seems a suitable approach, especially when dealing with long-term medical considerations, while on the other hand still being robust, safe and also less costly.
In [7] we already proposed a rough concept for the PowerGrasp soft-exosuit system, which is primarily intended for the active support of overhead car assembly and whose key development factors are based on Table 1. Due to its modular, highly flexible setup and by supporting up to four different joints on one limb (shoulder, elbow, wrist and fingers), it can be easily adapted to changing requirements within various applications. Additional insights into the design process of the PowerGrasp soft-exosuit system from a more design and therapist perspective can be found in [6].
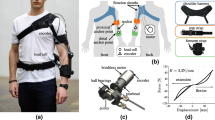
To figure out what type(s) of actuation units might serve the requirements of our soft-actuated system best we realised and tested different approaches. This includes 3D-printed Thermoplastic Polyurethane(TPU) based actuators, silicone-casted actuators, fabric encapsulated rubber tube actuators as well as tendon driven actuators, shown in Fig. 1.
The tendon-based is well known concerning design in robots and exoskeletons. The Application in exosuits can become troublesome though, since all of the tendon-forces will have to be redirected locally at the joints—most likely this will result in unacceptably high loads to the wearers’ bone-joint structure, especially when higher assisting loads are required. In the context of modularization, this problem gets intensified, because of the intersection problem between the separate modules. To lower the effects of friction and to allow reasonable control the integration of rigid redirecting units would be advisable—the opposite of being soft.

Samples of tested manufacturing methods for actuator-design on different joints
For inflatable actuators the production methods of monolith casting and 3D-printing show high potential for unrestricted soft actuator design as well as supporting direct inclusion of sensors and electronics. But in real-world scenarios, achievable assisting loads are limited due to the material characteristics. The permeability of the TPU-based actuator was growing with time and in case of damage, these actuators are hard to repair. As profound knowledge on long-term characteristics for these types of actuators is not available, we consider this fact as critical to a potential application in an industrial environment.
Alternative ways to create inflatable actuators is by using two-layer material set-ups. One approach uses an-isotropic structural behaviour of the outer layer (e.g. “bionic muscles”). Another uses predefined textile-patterns on the outer layer to achieve the (use-case specific) intended force vector and is mainly driven by varying the stiffness of the structure through pressure variation. Even though the design flexibility of this approach is lower compared to the generative approaches, one can still generate a large variety of actuation schemes. A major advantage, especially in the stiffness variation approach, is the high robustness of the setup due to the functional separation of inner and outer layer. The pattern of the outer layer indicates the resulting force vector as well as defines the overall flexibility and robustness against potential physical damage. The inner layer can be specifically designed to encapsulating high pressure. The functional separation also allows for easy maintenance and repair. Additionally, the actuators are flexible as textiles when depressurized - thus allowing a maximum of comfort. Because of the many advantages the actuation modules of the PowerGrasp system were finally designed according to the approach based on stiffness-control of a two-layered textile actuator—utilizing nylon polyamide fabric as outer layer and butyl tubes as inner layer—a sample can be seen in Fig. 1c. The use of Stratos–Cordura® 3-layer laminate (highly stressable) as outer layer allows the application of high pressuring states by far surpassing the other actuation methods (pressure of up to 3 bar repeatably applicable).
3 Conclusion and Discussion
To not only show technical feasibility but also to achieve high acceptance-rates for applications in industrial environment we made a revision of requirements for the design of exoskeletons and extended the scope from technical and economical aspects (classically references) by also considering medical concerns, medical long-term concerns and comfort (Table 1). We believe that considering these aspects in the design of future exoskeletons will play an essential role in the integration process of exoskeletons into the industrial environment. Next, we want to focus on identifying the control characteristics of the actuation units and include smart control schemes on the soft-exosuit to bring the benefits of the system to a maximum.
References
D. Hoy, P. Brooks, F. Blyth, R. Buchbinder, The epidemiology of low back pain. Best Practice Res. Clin. Rheumatol. 24, 769–781 (2010)
C. Maar, R. Fricker, Vorteil Vorsorge Die Rolle der betrieblichen Gesundheitsvorsorge für die Zukunftsfähigkeit des Wirtschaftsstandortes Deutschland (Booz & Company, 2009)
M.P. De Looze, T. Bosch, F. Krause, K.S. Stadler, L.W. O’Sullivan, Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 59(5), 671–681 (2016)
T. Butler, J.C. Gillette, Exoskeletons: used as PPE for injury prevention, in Professional Safety (2019), p. 33
R. Gopura, K. Kiguchi, Mechanical designs of active upper-limb exoskeleton robots: state-of-the-art and design difficulties, in 2009 IEEE International Conference on Rehabilitation Robotics (IEEE, 2009), pp. 178–187
R. Flechtner, K. Lorenz, G. Joost, Designing a wearable soft-robotic orthosis: a body-centered approach, in Proceedings of the Fourteenth International Conference on Tangible, Embedded, and Embodied Interaction (TEI-2020), Future Bodies, Future Technologies (ACM, 2020), pp. 863–875
J. Kuschan, J. Goppold, H. Schmidt, J. Krueger, Powergrasp: concept for a novel soft-robotic arm support system, in ISR 2018; 50th International Symposium on Robotics (2018), pp. 1–6
Acknowledgements
PowerGrasp was funded by the German Federal Ministry of Education and Research (BMBF).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Goppold, JP., Kuschan, J., Schmidt, H., Krüger, J. (2022). PowerGrasp: Development Aspects for Arm Support Systems. In: Moreno, J.C., Masood, J., Schneider, U., Maufroy, C., Pons, J.L. (eds) Wearable Robotics: Challenges and Trends. WeRob 2020. Biosystems & Biorobotics, vol 27. Springer, Cham. https://doi.org/10.1007/978-3-030-69547-7_57
Download citation
DOI: https://doi.org/10.1007/978-3-030-69547-7_57
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-69546-0
Online ISBN: 978-3-030-69547-7
eBook Packages: EngineeringEngineering (R0)