
Abstract
The main focus of the present study is to evaluate the accuracy of the soft-sphere method to represent the particle-particle and the particle-wall collision effect in dilute rapid particulate flow. At this aim, 3D soft-sphere Discrete Element Method (DEM) simulation results are presented for frictionless elastic and inelastic particles, for different sizes and mean solid volume fractions, transported in a fully developed vertical channel flow. The effect on particle statistics of the friction during particle-wall collisions is analyzed. Profiles of time-averaged quantities are assessed and well agree with simulation results available from the literature, obtained by using the hard-sphere model.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Understanding the dynamics of turbulent gas–particle flows has great importance for the successful design and optimization of many industrial applications, such as fluidized beds, dust collectors, cyclone separators. These systems involve many complex mechanisms, which are often coupled and interacting with each other. In the past decades, the focus was mainly on the complexity of the interaction between particles and gas-phase turbulence [1, 15] and the effect of particle–particle and particle–wall collisions [13, 14].
Gas turbulence has a predominant effect on particle diffusion for small particles. In this case, the influence of the solid-solid interactions is less important, because their dynamics is controlled by the fluid motion. However, in the case of large particles, the distance they need to respond to the fluid flow is larger than the characteristic dimension of the confinement, and the effect of the flow turbulence may be neglected. Their motion is considerably influenced by the solid-solid collision process in confined flows. In this work, the inertial particles motion in a steady and imposed fluid flow is studied.
Due to the discrete nature of the particles, the numerical simulation of the particle motion is performed in a Lagrangian framework by Discrete Element Method (DEM). Such an approach can be coupled with different models resolving the fluid phase, depending on the characteristic length scales of the fluid and particles.
An accurate resolution of particle-particle and particle-wall interactions is necessary to describe properly the whole gas-particles flow dynamics. For this reason, the objective of the present work is twofold. The first objective is to study the influence of particles properties (particle size, concentration, restitution coefficient, etc.) on the velocity statistics in vertical channel flows using the DEM simulation. For modeling the solid-solid interaction, DEM uses two approaches, the hard-sphere [3] and the soft-sphere models [5]. The soft-sphere model has computational advantages in simulating dense suspensions with multiple particle-particle contacts, while the hard-sphere model is better suited to dilute regimes. Indeed, the soft-sphere models makes it possible to address multiple collisions which occur in denses regimes, allowing particles to deform slightly at the contact point. The hard-sphere approach assumes instead that no deformation occurs during the instantaneous collision between the two solid bodies. In this work, the soft-sphere model is used, since this can treat both low and high particle number densities, and it can handle multiple contacts. Thus, the second objective is to evaluate the accuracy of the soft-sphere model to reproduce the solid-solid collision effect in a rapid gas-particles flow with dilute suspension of massive particles, comparing with Lagrangian simulation results based on the hard-sphere model [7, 9, 10].
2 General Description
2.1 Flow Configuration
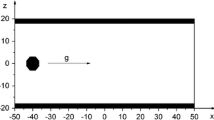
The proposed test case is a gas-particles vertical fully developed channel flow, studied early by [7, 9, 10]. The corresponding Reynolds number of the fully developed flow in the channel is about 42000. The computational domain is a rectangular box, with periodic boundary conditions in the spanwise (x) and streamwise directions (z) (see Fig. 1), while the y direction is normal to the walls. A monodisperse particle-laden fluid is introduced in the vertical direction z. The physical characteristics of the fluid are \(\rho _f = 1.205\) \(\mathrm {kg.m^{-3}}\), \(\nu _f = 1.515\times 10^{-5}\) \(\mathrm {m^2.s^{-1}}\). For the dispersed phase, two kinds of particle are studied: \(d_p = 1.5\) \(\mathrm {mm}\) and \(\rho _p = 1032\) \(\mathrm {kg.m^{-3}}\), or \(d_p = 406\) \(\mathrm {\mu m}\) and \(\rho _p = 1038\) \(\mathrm {kg.m^{-3}}\). These simulations are carried out for mean solid volume fractions \(\langle \alpha _p \rangle \) varying between \(10^{-3}\) and \(10^{-2}\). Low solid volume fractions and the large particle inertia make it possible to neglect the interactions between the fluid turbulence and the particles as well as the influence of the particles on the mean fluid flow. The Stokes number \(St=\tau _p u_{*}/L_y\) for the present problem is about 200 and 2500 for smaller and larger particles, respectively. Here, \(\tau _p=\rho _p d_p^2/18 \mu _f\) is the particle response time, \(u_{*}\) is the friction velocity and \(L_y\) is the channel width. According to the Stokes number values, it turns out that \(St \gg 1\), then the particles are not affected by the turbulence of the fluid. The mean fluid velocity profile is determined from a preliminary single-phase \(k-\epsilon \) computation (see Fig. 2) and fixed during all the simulations.

Flow configuration.

Mean streamwise velocity.
2.2 Averaging of Physical Quantities
Thanks to the homogeneity of streamwise and spanwise directions, mean variables depend only on the wall-normal coordinate y. Therefore, the channel is divided into 40 slices for \(d_p=406\) \(\mathrm {\mu m}\), 15 slices for \(d_p=1.5\) \(\mathrm {mm}\), parallel to the walls in y direction. Particles are associated with the slice in which their centres are located. The quantities are averaged spatially and temporally in each slices. The averaging operator will be written as \(\langle \cdot \rangle \), \(U_{p,i}\) and \(u_{p,i}^{\prime \prime }=u_{p,i}-U_{p,i}\) indicate the mean velocity of the particles in the i-th direction and the velocity fluctuations, respectively. Second and third order moments are defined as following \(\langle u_{p,i}^{\prime \prime } u_{p,j}^{\prime \prime }\rangle \) and \(\langle u_{p,i}^{\prime \prime } u_{p,j}^{\prime \prime } u_{p,m}^{\prime \prime }\rangle \), respectively. For the sake of simplicity, the particle velocity components \((u_{p,1},u_{p,2},u_{p,3})\) will be written as (u, v, w), the mean velocity components \((U_{p,1},U_{p,2},U_{p,3})\) will be noted as (U, V, W), and the fluctuation components \((u_{p,1}^{\prime \prime },u_{p,2}^{\prime \prime },u_{p,3}^{\prime \prime })\) will be noted as \((u^{\prime \prime },v^{\prime \prime },w^{\prime \prime })\). And \(n_p = N_p/V_c\) is defined as the particle number density, computed in a slice of volume \(V_c\) containing \(N_p\) particles.
3 Particle Dynamics: Lagrangian Simulation
The Lagrangian solver for particle tracking runs in two successive steps. The first step takes into account the fluid and gravity effects, which make move the particles. Each particle is tracked in a Lagrangian fashion based on the DEM. The fluid entrains the particles, and their velocity is changed using a second-order explicit Runge-Kutta algorithm. Since, periodic boundary conditions for particles are considered in streamwise and spanwise directions, particles leaving the calculation domain will be relocated using the periodicity and rebound conditions. For the fluid-particles interaction, the only drag is considered. The second step deals with the inter-particle and particle-wall collisions. To compute contact between solid bodies the soft-sphere model is employed. The solids are allowed to overlap with each other in a controlled manner. The collision is detected, when the distance between two particles and between a particle and a wall is less than the sum of their radii and the radius of the particle, respectively. The collision is computed in the mass-spring-dashpot system over a time step, that must be smaller than the time step for the fluid flow. In the soft-sphere model the choice of several numerical parameters is important to solve collisions properly. Particle rotation is not taken into account in our simulations. Each step will be detailed in the following sections.
3.1 The Equations of Motion
DEM simulations is the way to simulate particulate processes, tracking each particle and considering all particle-particle and particle-wall interactions. The motion of a single spherical particle p with mass \(m_p\) is deduced from Newton’s second law
\(\mathbf {u}_p\) and \(\mathbf {x}_p\) are the particle velocity, and position, \(\mathbf {F}_{D,p}\) is the drag force, \(\mathbf {F}_{G,p}\) is the gravity force and \(\mathbf {F}_{C,p}\) is the collision force exerted by the neighbouring solid bodies in contact. The total collision force \(\mathbf {F}_{C,p}\) acting on a particle p is computed as the sum of all the forces exerted by the \(N_p\) particles and \(N_w\) walls in contact \(\mathbf {F}_{C,p} = \sum _{b=1}^{N_{p}+N_{w}}\mathbf {f}^{col}_{q\rightarrow p}\). The drag force \(\mathbf {F}_{D,p}\) acting on the particle p is written
where \(C_D\) is the drag coefficient. According to the assumption, the only fluid-particle interaction force taken into account is the drag. The drag coefficient is based on the Schiller and Naumann correlation [12]. And the gravitational force is written as \(\mathbf {F}_{G,p} = m_p \mathbf {g}\).
For each particle, the equation of motion Eq. 1 is solved at each time step. To integrate it properly, different characteristic times based on the different phenomena (gravity, drag) are defined. Therefore, several criteria must be verified on each particle to choose the smallest time step appropriated to the most limiting characteristic time. In dilute rapid particulate flow simulations, once the stationary state is reached, the limiting time step is that defined from collision parameters.

Soft-sphere representation of two particles during collision.

Temporal evolution of the collision between two particles.
3.2 Collision Model
Particle-particle and particle-wall collisions are modeled using the soft-sphere approach [6] originally proposed by Cundall and Strack [5]. The particles are represented as a mass-spring-dashpot system (see Fig. 3). When the distance between particles p and q is less than the sum of their radii \(r_p\) and \(r_q\), particle starts to collide and a collision force \(\mathbf {f}_{q\rightarrow p}^{col}\) is generated. This force may be decomposed in normal and tangential components. \(\mathbf {f}_{q\rightarrow p}^{col} = \mathbf {f}_{n,q\rightarrow p}^{col} + \mathbf {f}_{t,q\rightarrow p}^{col}\). The normal component is computed as
where \(k_{n}\) is the normal spring stiffness, \(\mathbf {n}_{pq}\) the normal unit vector, \(\gamma _{n}\) is the normal damping coefficient, and \(\mathbf {u}_{pq,n}\) is the normal relative velocity. The term \(\delta _{pq}\) is defined as the overlapping distance between two particles \(\delta _{pq} = r_{p} + r_{q} - || \mathbf {O}_{p} - \mathbf {O}_{q} ||\) and \(M_{pq} = (\frac{1}{m_p} + \frac{1}{m_q})^{-1}\) is the effective mass of the \(p-q\) binary system. The overlapping distance is considered only in the normal direction. The unit normal vector and the normal relative velocity between particles p and q are defined respectively as
where \(\mathbf {u}_p\) and \(\mathbf {u}_q\) are the p and q particle velocities, respectively. For the tangential component of the contact force a Coulomb-type friction law is retained \(\mathbf {f}_{t,q\rightarrow p}^{col} = -\mu ||\mathbf {f}_{n,q\rightarrow p}^{col} || \mathbf {t}_{pq}\) where \(\mu \) is the dynamic friction coefficient.
3.3 Collision Parameters
The projection of the Eq. 1 on \(\mathbf {n}_{pq}\) gives the equation for \(\delta _{pq}\) in the normal direction:
Equation 5 is the differential equation of the damped harmonic oscillator and its solution is
with undamped angular frequency \(\omega _0 = \sqrt{\frac{k_n}{M_{pq}}}\) and normal damping parameter \(\gamma _n = \frac{-\ln {e_n}}{\sqrt{\pi ^2 + \ln ^{2}{e_n}}}\omega _0\), where \(e_n\) is the normal restitution coefficient. It means that the overlap depends on the user-defined parameters \(k_n\), \(e_n\) and the particle properties. The differentiation of Eq. 6 provides that \(\dot{\delta }_{pq}(t=0) = |u_{pq,n}^0|\). The contact during collision is solved over time and the duration of a contact can be determined as a time corresponding to the end of the collision \(\delta _{pq}(t=T_c)=0\) (see Fig. 4):
Since, the particle phase is monodisperse, \(T_c\) has a unique value in the particulate system. The contact duration depends on \(\omega _0\), \(\gamma _n\), which depend on \(k_n\), \(e_n\) and particle properties. It is essential to estimate the appropriate collision duration to perform simulations with appropriate particle time step.
3.4 Numerical Parameters
To ensure the numerical stability for the used numerical schemes and to treat the collision properly, the particle time step \(\varDelta {t}_p\) must be small enough. For example, in the case of the hard-sphere model, according to [11], where the particle velocity after collision is defined analytically from the velocity before collision, the limiting condition is defined as \(\varDelta {t}_{p} < \theta d_p/||\mathbf {u}_r||\), with \(\theta \approx 0.3\). The information needed to estimate this condition is the mean relative impact velocity \(u_r = ||\mathbf {u}_r||\), which can be estimated from the particles agitation \(q_{p}^{2}=1/2(u^{\prime \prime }+v^{\prime \prime }+w^{\prime \prime })\)
In our simulations based on the soft-sphere model, to estimate the time step, several conditions must be verified. First of all, \(\varDelta t_p\) has to be smaller or equal than the fluid time step, which is estimated from the CFL condition for the fluid phase \(CFL= \max _{i=1,3}{|u_{f,i}|}\varDelta t_f/\varDelta x_f\). To choose an appropriate value for \(\varDelta t_{p}\) two conditions should be verified. The first condition \(CFL_{p}=\varDelta {t}_p||\mathbf {u}_p||/\varDelta {x}_{f}\) for each particle is needed to ensure that a particle does not move more than few elements of the Eulerian mesh during a substep. The second condition is based on the fact that during a substep particles do not move more than \(100\cdot CFL_{p}^{col}\) \(\%\) of their diameter, where \(CFL_{p}^{col}=\varDelta {t}_{p}|{u}_{pq,n}^0|/d_p\). It means that this condition is necessary to control and limit the overlapping distance at the first impact. Another condition is that \(\varDelta t_p\) must be inferior to the contact time \(T_c\) to limit the overlapping distance during the collisions and to reach a sufficient resolution for the time integration of the stiff collision term in Eq. 1 (see Fig. 4)
\(N_c\) is the minimum number of steps during one contact. It is recommended in the literature to integrate a dry contact with \(\varDelta {t}_p\) in the range \([T_{c}/50,T_{c}/15]\) [2], and following [8] in the gas-particles flow \(N_c\) should be greater than \(N_c > 5\).
As discussed above, \(T_c\) depends on some parameters like \(k_n\), \(e_n\) and particle properties. Then to predict the collision duration \(T_c\), the appropriate value for \(k_n\) must be chosen for a given particle. Frequently used practice is to predict the appropriate value for \(k_n\) from the maximum value for the overlapping distance. The maximum overlap \(\delta _{pq}^{max}\) is obtained from \(\dot{\delta }(t)=0\)
By using an estimate for the value of \(u_{pq,n}^0\) and fixing the maximum overlap \(\delta _{pq}^{max}\), \(k_n\) can be obtained from Eq. 10. The only drawback of this approach is the lack of information concerning \(u_{pq,n}^0\) before performing the simulations. In some references, it is recommended that the maximum overlapping \(\delta ^{max}_{pq}\) is less than \(10\%\) of the particle diameter [4], other references propose instead to keep its value less than \(1\%\) [8]. The resulting high value of \(k_n\) leads to a small particle time step, which is very limiting for the numerical simulation. The point is how should be evaluated the stiffness coefficient to have less constrained particle time step without significantly affecting the flow dynamics. It will be discussed in the next section.
4 Simulation Results and Discussions
DEM simulations of the vertical channel flow are here presented. They are used to study the influence of the particle properties on the velocity statistics and to evaluate the soft-sphere approach in rapid particulate flow. Numerical test cases and main parameters are presented in the Table 1. The value of relative velocity \(u_r\) for all cases is obtained from \(q_{p}^{2}\) using Eq. 8.
Results for the mean particle streamwise velocity are shown by Fig. 5 (left panel). The fluid velocity is frozen and is the same for all studied cases (see Fig. 2). The left and middle panels of Fig. 5 correspond to the elastic frictionless cases for the inter-particle (\(e_c=1,\mu _c=0\)) and the particle-wall (\(e_w=1,\mu _w=0\)) collisions. Results show that, for all the cases, the mean particle velocity profile is flatter than that of the fluid (Fig. 2); this is due to the strong influence of transverse particle dispersion. Results also show that the mean particle velocity is mostly dependent on the particle diameter, which in turn shows the strong influence of the drag. The mean particle number density demonstrates (see the middle panel of Fig. 5) that near-wall geometrical effects have a strong influence on the collisional characteristics and lead to an overcrowding of the particles, creating a mean force towards the wall [7, 9, 10]. Smaller particles (\(d_p = 406\,\upmu \)m) are more transported by the fluid than larger particles (\(d_p = 1.5\) mm) at the center of the channel. Larger particles are instead more concentrated at the near wall region than the small ones. The numerical simulations results based on the soft-sphere model are in excellent agreement with hard-sphere model simulations for both mean streamwise velocity and mean particle number density (see the left and middle panel of Fig. 5). Kinetic stress components (second-order particle velocity correlations) for the case \(\langle \alpha _p \rangle = 1\times 10^{-2}\) are presented by Fig. 5 (right panel) for two different set of particles-wall collision parameters (\(e_w = 1,\mu _w = 0\) and \(e_w = 0.94,\mu _w = 0.325\)). The difference between the elastic frictionless case and the inelastic case with friction shows the strong sensitivity of the system to the boundary conditions for particles. Inelastic restitution \(e_w<1\) induces dissipation at the wall. When \(\mu _w>0\), it causes a friction effect at the wall characterized by a non-zero value of the shear stress \(\langle u^{\prime \prime }v^{\prime \prime }\rangle \). The friction effect involves a production of the vertical variance \(\langle u^{\prime \prime }u^{\prime \prime }\rangle \) by the velocity gradient term and, by collisional redistribution, an increase in \(\langle v^{\prime \prime }v^{\prime \prime }\rangle \) and \(\langle w^{\prime \prime }w^{\prime \prime }\rangle \). In the inelastic case with friction our results also fully agree with the simulations based on the hard-sphere model [10].

Comparison between numerical simulations based on the soft-sphere and the hard-sphere model. Left: mean streamwise velocity, middle: mean particle number density, right: kinetic stress tensor components for the case D.

Comparison for the different values of the stiffness coefficient. Left: probability density function (PDF) of the dimensionless maximum overlapping distance (\(d_p=406\,\upmu \)m), middle: cumulative distribution function (CDF) of the dimensionless maximum overlapping distance (\(d_p=406\,\upmu \)m), right: PDF of the first overlap weighted by \(\max {(\delta _{pq}^{0})}\)

Simulation results based on the soft-sphere model for different stiffness coefficients for the case D. Left: mean streamwise velocity, middle: mean particle number density, right: kinetic stress tensor components
The stiffness coefficient sensitivity analysis is realized to evaluate the accuracy of the soft-sphere model. In order to ensure this, first, Eq. 10 can be bounded from above using \(e_c \leqslant 1\) or \(e_w \leqslant 1\)
for the highest value of \(k_n\). On the other hand, \(|{u}_{pq,n}^0| \approx k \cdot u_r\) for \(k \leqslant 2\). Then, Eq. 11 will be rewritten like
As shown by Fig. 6 (left pannel), the maximum value of the overlap is strongly dependent on \(k_n\) (see Eq. 10). The higher \(k_n\), the lower the mean value of \(\delta _{pq}^{max}/d_p\) will be. But it is relevant to notice that even when \(k_n\) is low (\(k_n = 300\)), the percentage of the collisions which have the high overlapping is very small, as shown by cumulative distribution function (see the middle panel of Fig. 6). And its mean value corresponds more to the small overlapping. The high values of \(\delta _{pq}^{max}/d_p\) occurring rarely do not affect the whole dynamics of the gas-particles flow as demonstrated by Fig. 7 for different quantities. This observation provides to weaken the conditions on \(\delta _{pq}^{max}/d_p\) (Eq. 11).
Moreover, from Fig. 6 (right panel), it is observed that the first distance of the overlap \(\delta _{pq}^{0}\) does not depend on the stiffness coefficient value for different particle diameters, the first impact relative velocity \(u_{r}\) does not as well. This fact allows to identify the dimensionless parameter \(\kappa _{n} = \frac{u_{r}}{d_p}\sqrt{\frac{M_{pq}}{k_n}}\) depending on \(u_r\) and to estimate the mean overlapping distance as
where \(\lambda ^{*} \) takes values between (0, 0.05) less constraining for \(\varDelta {t}_p\). The dimensionless parameter \(\kappa _{n}\) provides the estimation of the mean overlapping knowing the value of the mean particles agitation and \(k_{n}\) for a given particle.
5 Conclusion
Soft-sphere DEM simulations have been performed and numerical results analyzed for a vertical gas-particles channel flow. Simulations have been performed neglecting the influence of the fluid turbulence on the particle fluctuating motion and the modification of the fluid flow by the particles. Two types of particles have been studied, for various mean volume fractions. Results based on two approaches, the soft-sphere and the hard-sphere models, have been compared and validated quantitatively and qualitatively for different physical variables. Thereafter, a sensitivity analysis about the soft-sphere model parameters has been carried out to gain insight in the choice of the optimal ones to properly treat the solid-solid collision. It was found that a less restrictive model for the maximum overlapping distance can be defined as a function of the mean value of the impact variables without influencing the flow behaviour.
References
Berlemont, A., Simonin, O., Sommerfeld, M.: Validation of inter-particle collision models based on large eddy simulation. ASME-PUBLICATIONS-FED 228, 359–370 (1995)
Bernard, M., Climent, E., Wachs, A.: Controlling the quality of two-way Euler/Lagrange numerical modeling of bubbling and spouted fluidized beds dynamics. Ind. Eng. Chem. Res. 56, 368–386 (2016)
Campbell, C., Brennen, C.: Computer simulation of shear flows of granular material. Stud. Appl. Mech. 7, 313–326 (1983)
Capecelatro, J., Desjardins, O.: An Euler-Lagrange strategy for simulating particle-laden flows. J. Comput. Phys. 238, 1–31 (2013)
Cundall, P., Strack, O.: A discrete numerical model for granular assemblies. Geotechnique 29, 47–65 (1979)
Dufresne, Y., Moureau, V., Masi, E., Simonin, O., Horwitz, J.: Simulation of a reactive fluidized bed reactor using CFD/DEM (Center for Turbulence Research Proceedings of the Summer Program) (2016)
Fede, P., Simonin, O.: Direct simulation Monte-Carlo predictions of coarse elastic particle statistics in fully developed turbulent channel flows: comparison with deterministic discrete particle simulation results and moment closure assumptions. Int. J. Multiphase Flow 108, 25–41 (2018)
van der Hoef, M.A., Ye, M., van Sint Annaland, M., Andrews, A.T., Sundaresan, S., Kuipers, J.A.: Multiscale modeling of gas-fluidized beds. Adv. Chem. Eng. 31, 65–149 (2006)
Sakiz, M., Simonin, O.: Continuum modelling and Lagrangian simulation of the turbulent transport of particle kinetic stresses in a vertical gas-solid channel flow. In: 3rd International Conference on Multiphase Flows, Lyon, France (1998)
Sakiz, M., Simonin, O.: Development and validation of continuum particle wall boundary conditions using Lagrangian simulation of a vertical gas-solid channel flow. ASME-PUBLICATIONS-FED 99 (1999)
Sakiz, M.: Simulation numérique Lagrangienne et modélisation eulérienne d’écoulements diphasiques gaz-particules en canal vertical. Ph.D. thesis, Marne-la-vallée, ENPC (1999)
Schiller, L., Naumann, A.: A drag coefficient correlation. Vdi Zeitung 77 (1935)
Sommerfeld, M.: Analysis of collision effects for turbulent gas-particle flow in a horizontal channel: part I. Particle transport. Int. J. Multiphase Flow 29, 675–699 (2003)
Tanaka, T., Tsuji, Y.: Numerical simulation of gas solid two-phase flow in a vertical pipe on the effect of inter particle collision (1991)
Vreman, A.: Turbulence characteristics of particle-laden pipe flow. J. Fluid Mech. 584, 235 (2007)
Aknowledgement
This work received funding from Agence national de la recherche (ANR) through the project MORE4LESS. It was granted access to the HPC resources of CINES supercomputing center under the allocations A0012B07345 and A0062B10864. CINES is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Nigmetova, A., Dufresne, Y., Masi, E., Moureau, V., Simonin, O. (2021). Soft-Sphere DEM Simulation of Coarse Particles Transported by a Fully Developed Turbulent Gas Vertical Channel Flow. In: Deville, M., et al. Turbulence and Interactions. TI 2018 2018. Notes on Numerical Fluid Mechanics and Multidisciplinary Design, vol 149. Springer, Cham. https://doi.org/10.1007/978-3-030-65820-5_16
Download citation
DOI: https://doi.org/10.1007/978-3-030-65820-5_16
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-65819-9
Online ISBN: 978-3-030-65820-5
eBook Packages: EngineeringEngineering (R0)