
Abstract
A rock avalanche that destroyed 23 houses and killed 35 people occurred on 28 August 2017, Nayong, SW China. Combined with the dynamic parameters from seismic signal inversion, a discrete element model, MatDEM was used to determine the kinematic behaviour of the rock avalanche. By comparing the velocity evolution process of numerical simulation with that of seismic signal inversion, we are able to find the best fitting parameters. The dynamic process obtained by modelling was compared with the frequency distribution spectrum of the nearest seismometer, showing that the dynamic process is in good agreement with those parameters inverted from seismic signals. The simulation results show that the movement process lasted for nearly 40 s, with a maximum speed of 40 m/s. The selected models and parameters contribute to explain the dynamic processes of similar rock avalanche more accurately and are of considerable significance to the hazard prediction in karst area.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Rock avalanche dynamics
- Avalanche seismology
- Time-series analysis
- Discrete element method
- Model calibration
Introduction
Rock avalanches are the most destructive gravitational instabilities due to their burstiness, high mobility, long runout, and entrainment capacity. In addition to field observation and experiments, many dynamic models and numerical methods have been proposed for predicting the post-failure behavior and movement process of long runout rock avalanches (Hungr 1995; Crosta et al. 2003; Cagnoli and Piersanti 2015). However, it is difficult to obtain the accurate parameters needed for these numerical models. Due to the size effect, the experimental results of rock samples may be inconsistent with the actual material mechanical parameters during large-scale landslide movement, resulting in inaccurate simulation results. The validity of these models and approaches has been verified through comparison with real events.
 Nevertheless, owing to the lack of direct time-dependent observation evidence for rock avalanches’ movement process, few models are considered to be effective.
Nevertheless, owing to the lack of direct time-dependent observation evidence for rock avalanches’ movement process, few models are considered to be effective.
Recently, the seismic signals recorded by surrounding seismometers provided a possible approach to analyze the energy variation and movement process of rock avalanches (Allstadt 2013; Ekström and Stark 2013; Hibert et al., 2014; Moretti et al. 2015). Therefore, using the dynamic parameters obtained by seismic signal inversion can help to constrain the numerical simulation.
In this paper, through the analysis of seismic signal, more constraints are provided for the dynamic process of the Nayong avalanche. The time frequency distribution spectrum, which can reflect the movement stage of the rock avalanche, can be obtained by Hilbert-Huang Transform. And through the force–time function, detailed dynamic characteristics can be determined. Afterward, the runout behavior of Nayong avalanche was simulated by the 3D discrete element model, MatDEM, and the simulated results are verified by comparing in with field investigation and seismic data. It is expected that this method combining seismic signal and simulation model could help in better understanding the possible mechanism of rock avalanche and conducting predictive simulations of similar events in bare karst area.
The Nayong Rock Avalanche
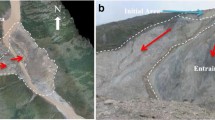
Nayong rock avalanche occurred in Southwest China, where there are approximately 62 × 104 km2 of bare karst topography (Huang and Cai 2007). In the past few years, several catastrophic rock avalanches, especially triggered by mining activities and rainfall, were occurred in the karst areas of China and brought damage to the surrounding infrastructure and facilities (Yin et al. 2011; Xing et al. 2015). Unlike other rock avalanches, there is a clear sign of rock collapse of Nayong rock avalanche and the local residents recorded even the whole process from rock collapse to debris flow with smartphone (Fan et al. 2018). Nevertheless, due to its size and runout distance far beyond the prediction, 35 people died and 23 houses were destroyed (Fig. 1).

a Buried village in the Nayong rock avalanche. b Location of the hillslope. c Pre-event image of the Nayong rock avalanche. d Post-event image of the Nayong rock avalanche. 1–1′ Cross-section line. (Zhu et al. 2019)
Figure 2 shows the 2D longitudinal profile of Nayong rock avalanche. This event involved the displaced materials with a volume of 0.8 Mm3, and this comprise approximately 0.49 Mm3 of rock mass from the source area and 0.31 Mm3 of materials that was entrained along the runout path. The sliding mass travelled about 820 m along the runout path with an elevation difference of 280 m, and eventually deposit at the toe of Pusa village.

Longitudinal profile of the Nayong rock avalanche (Zhu et al. 2019)
Seismic Data and Method
Seismic Data
Six three-component broadband seismometers around the Nayong County have recorded the seismic signals generated from the rock avalanche (Fig. 3). According to the records of the closest station, ZJW station, with a distance of 5.5 km, the seismic signal started at 10:21:48 local time, increasing to peak motion at 10:22:23, within a strong signal lasting for 35 s, and gradually fades into the background noise after 10:24:00. The low-frequency component of the seismic signal is generated by the cycle of loading and unloading of the solid Earth by the bulk acceleration and deceleration of the landslide mass, while the high-frequency component is generated by the friction and collision between rocks and rock bed (Ekström and Stark 2013). In this study, we use Hilbert-Huang transform to obtain the time–frequency distribution spectrum of the seismic signal recorded by ZJW station (Fig. 4).

Locations of the surrounding seismic stations (blue triangles) and recorded seismic signals

The amplitude-time–frequency Hilbert spectrum
The time–frequency distribution spectrum (Fig. 4) shows that the low-frequency signal was looming at 10:20:22, and amplitude was getting intense during 10:20:28.3–10:20:44.7. From 10:20:44.7, the amplitude was gradually decreased and finally disappeared in the background noise after 10:20:61.2. On the other hand, the high-frequency component (which greater than 0.5 Hz) starts to appear in 25 s and the amplitude soon reaches the peak. The high-frequency signal appears suddenly in about 25 s, and the large amplitude was maintained at 22–44 s, then started to decrease at 44.7 s, further decreased after 61.2 s, finally disappears in the background at the 80 s.
Method
The earthquake produced by landslides or rock avalanches can be represented by a single-force mechanism (Fukao 1995). Therefore, the solid Earth can be considered a slope and the sliding mass can be a constant mass body sliding above the slope (Ekström and Stark 2013). For the sliding body, the force \({F}_{net}\) is exerted by the Earth’s crust, and there is another force \({F}_{e}\left(t\right)\) acting on the Earth’s crust, both of which are equal in magnitude and opposite in direction. Then the \({F}_{e}\left(t\right)\) is equal to
\({F}_{e}\left(t\right)\) is equivalent to the single-force source for generating long-period seismic signals of rock avalanche (Fukao 1995). So \({F}_{e}\left(t\right)\) is called force–time function this study. \({F}_{e}\left(t\right)\) can be determined by inverting the low-frequency seismic data (Allstadt 2013). The avalanche source is assumed to be a stationary point source. The impulse response set between the source and each stations pair are known as Green’s function, then the seismic displacement records \({\varvec{U}}\left(t\right)\) can be expressed by the convolution of force–time function and Green’s function (Stein and Wysession 2003).
For low-frequency signals, Green’s functions \({\varvec{G}}(t)\) can be calculated by the wave number integration method. Because of the insensitivity of low-frequency signals to small-scale heterogeneity, the 1-D generalized Earth model was used in this study, which is from Crust 1.0. To make the models smoother, the force–time function can be inverted by a damped least-squares approach (Allstadt 2013).
where \({{\varvec{G}}}^{*}\) is the convolution matrix of Green’s function, \({\varvec{I}}\) is the identity matrix and \(\alpha \) is the damping coefficient. Once the force–time function is obtained, we can calculate the time-varying velocity of the sliding mass v(t) by integrating the force and displacement \({\varvec{d}}\left(t\right)\) by integrating twice.
In this case, the mass of the sliding body can be estimated by the results of field investigation. From Fig. 5, we can see that starting from 23.5 s, the speed of the sliding mass is increasing rapidly, reaching the maximum of 31.8 m/s at 42.5 s. After that, its speed gradually decreases, almost zero at 75.8 s. And the maximum movement distance of mass is 774 m.

Kinetic parameters of the sliding mass (velocity and displacement)
The Discrete Element Model
For investigating the detailed mechanisms of the Nayong avalanche, 3D discrete element model, the MatDEM (Liu et al. 2013) was applied to simulate the kinematic behavior of sliding mass. In this model, rock and soil are simulated by a series of tightly packed discrete elements. The motion of elements follows the Newtonian equation of motion, and the elements contact through breakable, linear elastic spring in normal and tangential directions. An artificial viscosity, that can damp the rebound energy of the particles on boundary, is added to the model. In the discrete element model, time-stepping iterative algorithm was developed to model and observed the dynamic evolution of elements (Cundall and Stack 1979). To accurately simulate the model’s elastic properties, the time step should be much smaller than the natural vibration period of the system. In this study, the time step is set to 0.02 times of the natural vibration period of the elements system. MatDEM, adopts GPU matrix calculation to support the dynamic simulation of millions of discrete elements. Thus, the entrainable basement layer can also be constructed with discrete elements. The initial model is constructed by simulating the gravitational deposition of discrete elements. The discrete elements with a mean radius of 5 m have a certain initial velocity in a rectangular simulation box, colliding each other under gravity. Then, they deposit in a random position under artificial compression. Deposited elements are shaped according to the digital elevation model. In order to save computation, elements in the lowest layer are defined as wall elements that do not participate in the dynamic simulation process. Based on the geological properties, other discrete elements are divided into four layers, in which the source area is divided separately due to the severe shattering (Fig. 6).

Basic numerical model of Nayong avalanche
Each layer has different mechanical properties (Table 1), which are obtained by a formula given by Liu that can convert the laboratory mechanical test data into MatDEM parameters (Liu et al. 2017).
Results and Discussion
Simulation Results
Previous studies have shown that the friction coefficient has a tremendous influence on the movement of landslides in numerical model (Lin and Lin 2015). Consequently, this study adopts different intergranular friction coefficient of source area elements (0.4, 0.6 and 0.8) to provide quantitative estimates of the initial conditions. Figure 7 shows the displacement distribution of sliding elements in three scenarios. The final deposition of three different parameters are all about 600 m long and 400 m wide along the sliding direction. Compared with the actual event, the simulation results are roughly the same in length and extends about 100 m to the northeast direction. Similar deposition results are obtained with different intergranular friction coefficients.

Simulation of the numerical model with different intergranular friction coefficients
This phenomenon may be because the kinetic energy of elements is mainly dissipated by the collision between particles or between particles and the basement. These collisions caused some elements to spread further and more elements entrained into the movement. We can see that in the scenario of low friction coefficient, more elements rushed out of the main deposition body. Moreover, the displacement of elements at the front edge of the landslide mass is smaller than that at the centre of the deposition mass. That means that the elements at the front edge of the landslide mass are not all from the source areas, and there are also many elements that were entrained from the basement. These entrainment phenomena are also more intense in low friction scenarios.
Best Scenario
We can hardly distinguish which simulation result is most consistent with the actual event from Fig. 7. With the dynamic parameters from seismic signal inversion, we can better judge the numerical simulation (Moretti et al. 2015).
Figure 8 shows the velocity-distance pattern obtained from numerical simulation of three scenarios and seismic signal inversion. The velocities of the simulation results are the average velocity of elements at the front edge of the sliding mass, while the velocity inversed from the seismic signal is the centre of the sliding mass. We can see that the velocity of each scenario is increasing rapidly before the horizontal distance reaches 100 m, and except for the data inversed by the seismic signal, the other scenarios reach the maximum speed when the horizontal distance goes to 200 m, i.e., before the 20 m-high hillslope. With the same displacement, velocities of sliding mass in different scenarios are just opposite to the order of the intergranular friction coefficient. The friction coefficient only changes the absolute value of the sliding mass’s velocity without influencing its changing law. It indicates that the changing law of the Nayong avalanche’s velocity is mainly affected by the terrain and the main obstacle to the sliding movement is the 20 m-high hillslope.

Avalanche velocity pattern
Calculating the area difference between the three curves and the seismic wave inversion curve by integral, we can judge which scenario can best reflect the dynamic process of the seismic signal. Table 2 shows that the numerical model, while the intergranular friction coefficient of source area elements equal to 0.6, is the best scenario closest to the real dynamic process of the landslide.
Dynamic Process
Figure 9 shows the evolution of the Nayong rock avalanche simulated by the best MatDEM scenario. The simulation starts from the overall rock collapse, namely, 10:22:23.5 on the day of the disaster. The primary movement process lasted for about 40 s, and then the sliding body expanded laterally only. In Fig. 9, elements in the source area began to rush, and the front edge of landslide mass reached the toe of the hillslope with a height of about 20 m at 12.6 s. After 31.5 s, the front of the sliding mass almost stopped moving. The final deposition is about 650 m long and 400 m wide along the sliding direction. Compared with the actual event, the simulation results are roughly the same in length and extends about 150 m to the northeast. In the numerical simulation, the front edge of the sliding mass is not divided into two branches since the radius of the elements of 5 m is too large relative to the 20 m-high hillslope.

Evolution of the Nayong rock avalanche simulated by MatDEM
Figure 9 shows the velocity evolution of sliding mass. Between 0 and 12.6 s, the speed of the avalanche increases rapidly. After 12.6 s, the speed of most elements began to decline. At 18.9 s, only the front edge of sliding mass has a visible speed. After 31.5 s, the speed of most elements is 0, and a small number of elements in the source area continue to fall. The maximum speed of the element is about 40 m/s, which happened at 12.6 s. At this time, the landslide mass is passing through the 20 m-high hillslope.
For a comprehensive understanding of dynamic process, we compare the time–frequency distribution spectrums to the simulations that best fit the observations, and the UAV video (Fig. 10). Both Fan et al. (2018) and Zhu et al. (2019) focus on the analysis of the failure process of the Nayong avalanche through UAV video, while this paper studies the rock fall in the source area after the overall collapse. The magnitude of elements velocity and the number of moving elements can indicate the intensity of energy release. As shown in Fig. 10, the changes in velocity and sliding volume are in good agreement with the seismic signal. At 6.3 s (10:22:29.8), with materials from the source were getting high speed, colliding each other violently, and impacting the basement layer, all the high and low-frequency signal began to be strong. Between 6.3 and 21.5 s (10:22:29.8–10:22:45), a large amount of mass was entrained into the high-speed movement resulting in both the high and low-frequency signal maintaining a strong amplitude in this period. After 21.5 s (10:22:45), most materials had stopped moving, only the front end of the sliding body still spreading forward, so the low-frequency signal was weakened. While the high-frequency signal remained strong due to the constant high-speed falling rocks from the source area colliding with accumulated materials. These rocks impacted the basement severely, which made the low-frequency signal occasionally strong during this period. At 38.5 s (10:23:02) the avalanche movement basically stopped, but the rockfall from source area continued. Until 56.7 s (10:23:20), the rockfall in the source area stopped and the seismic signal faded into the background.

Comparison of the seismogram and time–frequency distribution spectrum of ZJW station with the simulated velocity evolution of best scenario. Snapshots from UAV video are added
Conclusion
The interpretation of the seismic signal is used to calibrate the parameters of landslide simulation using the 3D discrete element model, MatDEM. Analysis of the intensity and time history of the seismic signals shows that the seismic signals generated by the Nayong avalanche have obvious long-period components. Based on the force history, the time-varying velocity and distance of the Nayong avalanche can be obtained by integral. Combined with the results of seismic signal interpretation, the best MatDEM simulation results are selected from three scenarios. The simulation results showed that the movement lasted for about 40 s, and the maximum speed was 40 m/s. The dynamic process is in good agreement with those parameters obtained from seismic signal inversion.
In summary, due to the uncertainty and suddenness of occurrence time, many large landslides have no direct evidence of their dynamic process. Conventionally, the parameter calibration of numerical simulation can only be based on the back analysis of the field accumulation. For rock avalanche, although the dynamic process from seismic signal inversion will be affected by factors such as rockfall from the source area, it is still an effective method to constrain discrete element modelling. Using seismic signals can improve the reliability and accuracy of the results in the modelling, which is useful for predicting and assessing further landslide hazards.
References
Allstadt K (2013) Extracting source characteristics and dynamics of the August 2010 Mount Meager landslide from broadband seismograms. J Geophys Res Earth Surf 118(3):1472–1490
Cagnoli B, Piersanti A (2015) Grain size and flow volume effects on granular flow mobility in numerical simulations: 3-D discrete elements modeling of flows of angular rock fragments. J Geophys Res Solid Earth 120:2350–2366
Crosta GB, Imposimato S, Roddeman DG (2003) Numerical modelling of large landslides stability and runout. Nat Hazards Earth Syst Sci 3(6):523–538
Cundall P, Strack O (1979) A discrete element model for granular assemblies. Geotechnique 29(1):47–65
Ekström G, Stark CP (2013) Simple scaling of catastrophic landslide dynamics. Science 339(6126):1416–1419
Fan XM, Xu Q, Scaringi G, Zheng G, Huang RQ, Dai LX, Ju YZ (2018) The “long” runout rock avalanche in Pusa, China, on August 28, 2017: a preliminary report. Landslides 16(1)
Fukao K (1995) Single force representation of earthquakes due to landslides or the collapse of caverns. Geophys J Int 122:243–248
Huang QH, Cai YL (2007) Spatial pattern of Karst rock desertification in the Middle of Guizhou Province, Southwestern China. Environ Geol 52:1325–1330
Hungr O (1995) A model for the runout analysis of rapid flow slides, debris flows, and avalanches. Can Geotech J 32(4):610–623
Hibert C, Ekström G, Stark CP (2014) Dynamics of the Bingham Canyon Mine landslides from seismic signal analysis. Geophys Res Lett 41:4535–4541
Liu C, Pollard DD, Shi B (2013) Analytical solutions and numerical tests of elastic and failure behaviors of close-packed lattice for brittle rocks and crystals. J Geophys Res Solid Earth 118(1):71–82
Liu C, Xu Q, Shi B, Deng S, Zhu H (2017) Mechanical properties and energy conversion of 3D close-packed lattice model for brittle rocks. Comput Geosci 103:12–20
Lin CH, Lin ML (2015) Evolution of the large landslide induced by Typhoon Morakot: a case study in the Butangbunasi River, southern Taiwan using the discrete element method. Eng Geol 197:172–187
Moretti L, Allstadt K, Mangeney A, Capdeville Y, Stutzmann E, Bouchut F (2015) Numerical modeling of the Mount Meager landslide constrained by its force history derived from seismic data. J Geophys Res Solid Earth 120(2579):2599
Stein S, Wysession M (2003) An introduction to seismology, earthquakes, and earth structure. Blackwell, Malden, MA
Xing AG, Wang GH, Li B, Jiang Y, Feng Z, Kamai T (2015) Long runout mechanism and landsliding behaviour of a large catastrophic landslide triggered by a heavy rainfall in Guanling, Guizhou, China. Can Geotech J 52:971–981
Yin YP, Sun P, Zhu JL, Yang SY (2011) Research on catastrophic rock avalanche at Guangling, Guizhou, China. Landslides 8(4):517–525
Zhu YQ, Xu SM, Zhuang Y, Dai XJ, Lv G (2019) Xing AG (2019) Characteristics and runout behaviour of the disastrous 28 August 2017 rock avalanche in Nayong, Guizhou, China. Eng Geol 259:105154
Acknowledgements
This study was supported by the National Key R&D Program of China (2018YFC1504804) and the National Natural Science Foundation of China (No. 41530639).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Luo, H., Xing, A., Jin, K., Xu, S., Zhuang, Y. (2021). Characteristic Analysis of the Nayong Rock Avalanche Based on the Seismic Signal. In: Casagli, N., Tofani, V., Sassa, K., Bobrowsky, P.T., Takara, K. (eds) Understanding and Reducing Landslide Disaster Risk. WLF 2020. ICL Contribution to Landslide Disaster Risk Reduction. Springer, Cham. https://doi.org/10.1007/978-3-030-60311-3_10
Download citation
DOI: https://doi.org/10.1007/978-3-030-60311-3_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-60310-6
Online ISBN: 978-3-030-60311-3
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)