
Abstract
Various concepts of solutions can be employed in the non-cooperative game theory. The Berge equilibrium is one of such solutions. The Berge equilibrium is an altruistic concept of equilibrium. In this concept, the players act on the principle “One for all and all for one!” The Berge equilibrium solves such well known paradoxes in the game theory as the “Prisoner’s Dilemma”, “Battle of the sexes” and many others. At the same time, the Berge equilibrium rarely exist in pure strategies. Moreover, in finite games, the Berge equilibrium may not exist in the class of mixed strategies. The paper proposes the concept of a weak Berge equilibrium. Unlike the Berge equilibrium, the moral basis of this equilibrium is the Hippocratic Oath “First do no harm”. On the other hand, all Berge equilibria are some weak Berge equilibria. The properties of the weak Berge equilibrium have been investigated. The existence of the weak Berge equilibrium in mixed strategies has been established for finite games. A numerical weak Berge equilibrium approximate search method, based on 3LP-algorithm, is proposed. The weak Berge equilibria for finite 3-person non-cooperative games are computed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
A wide class of economic, social and political processes are well described by the methods of the game theory. Often, when decisions are made, participants in such processes can not agree among themselves that are modeled by using non-cooperative games. Certainly, the most well-known concept of a solution in the theory of non-cooperative games was proposed by John Nash in 1950 in [1]. For this work in 1994 he was awarded the Nobel Prize in Economics.
However, the application of the Nash equilibrium concept in the modelling of real socio-economic and political conflicts, in some cases, leads to paradoxical results, such as the “prisoner’s dilemma”. One of the first who has noticed this was Claude Berge in [2]. In this book, Berge proposed a new concept of equilibrium, according to which, players are divided into coalitions, while players of one coalition can work together to maximize the payoffs of players of another coalition. Apparently, a crushing review by Martin Shubik [3] on Berge’s book [2], led to the fact that Claude Berge switched his attention from the game theory to other areas of mathematics. After decades, based on Berge’s ideas, V.I. Zhukovsky [4, 5] and K.S. Vaisman [6, 7] suggested a new altruistic concept of equilibrium which was called a Berge equilibrium (BE). In this concept, the players act on the principle of “One for all and all for one!” from Alexander Dumas’s novel “The Three Musketeers”. Another interpretation of Berge equilibrium is [8] the Golden Rule of morality: “Do things to others the way you want them did with you”. The development of the Berge equilibrium concept is described in details in the review [9]. It is worth noting that the BE solves such well known paradoxes in the game theory as the “Prisoner’s Dilemma”, “Battle of the sexes” and many others. Also the use of BE is possible to the economics applications [10].
At the same time, the Berge equilibrium concept has some drawbacks. One of these drawbacks is that Berge equilibrium rarely exists in pure strategies. Moreover, in N- person games \((N \ge 3)\) with a finite set of strategies, Berge equilibrium may not exist in the class of mixed strategies. Such example was constructed, in particular, in [11]. The lack of BE might be caused by the fact that it is often impossible to follow the Golden Rule of morality in relation to all players at the same time. For example, if the goals of two players are opposite, then the third player will not be able to apply the Golden Rule to them simultaneously. In this case, increasing the payoff of one player, simultaneously reduces the payoff of the other.
In this paper, we introduce the concept of the weak equilibrium according to Berge (Weak Berge Equilibrium or WBE), no longer based on the Golden Rule of morality, and on the Hippocratic oath “First do no harm!”. Here, we will assume that, making a decision, each player adheres to the situation, one-sided deviation from which can harm although to one of the other players. Further, in Sect. 2, the concept of the weak Berge equilibrium is formalized, some of its properties are studied and sufficient conditions for the existence of such an equilibrium in N-person games are given. In Sect. 3, a numerical WBE approximate search method based on [12,13,14] is proposed, and numerical simulation results are given for finite games of three person.
2 The Concept of the Weak Berge Equilibrium
Let us consider a non-cooperative N-person game in normal form:
where \(\mathbf {N} = \{ 1,2, \ldots , N\}\) denotes the set of serial numbers of the players; the set of \(x_i\) strategies of the i-th player \((i \in \mathbf {N})\) is denoted by \(X_i\), where \(X_i \subseteq \mathbf {R}^{n_i}\). As a result of the players choosing their strategies, the strategy profile is \(x = (x_1, \ldots , x_N) \in X = X_1 \times X_2 \times \ldots \times X_N \subseteq \mathbf {R}^{n}\) \((n = n_1 + n_2 + \ldots + n_N)\). On the set of strategy profiles X for each player i \((i \in \mathbf {N})\) the scalar payoff function \(f_i(x):X \rightarrow \mathbf {R}\) was defined. The value of \(f_i(x)\) was realized on the strategy profile chosen by the players \(x \in X\) was called the payoff of the i-th player.
The game \(\varGamma \) is played as follows. Each player i \((i \in \mathbf {N})\), without entering into a coalition with other players, chooses his strategy \(x_i \in X_i\). As a result of this choice, the strategy profile is \(x=(x_1, \ldots ,x_N) \in X\). After that, each player i gets his payoff \(f_i(x)\).
Thus, when making a decision, the player is forced to focus not only on his payoff function, but also on the possible choice of the other participants in the game.
Further, \((y_i,x_{-i})\) denotes the strategy profile \((x_i, \ldots , x_{i-1},y_i,x_{i+1}, \ldots , x_N)\), which is obtained from strategy profile x by replacing the strategy of the i-th player \(x_i\) on \(y_i\).
The most popular concept of solution in the theory of non-cooperative games is Nash equilibrium.
Definition 1
A strategy profile \(x^e=(x^e_1, \ldots ,x^e_N) \in X\) is called a Nash equilibrium (NE) in game (1) if for every \(x \in X\) the system of inequalities
is true.
The Nash equilibrium strategy profile \(x^e \in X\) is stable with the respect to deviation of an individual player from his strategy which enters in \(x^e\). Applying the concept of the Nash equilibrium, the player proceeds from his own selfish motives. He only cares about his payoff, do not take into account the interests of other players. However, this approach leads to a number of paradoxes, such as the Tucker problem in the classic game called as Prisoner’s Dilemma.
Example 1
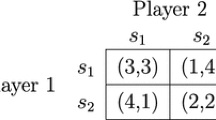
Let us consider the Prisoner’s Dilemma game. Two criminals are arrested on suspicion of a crime, but the police do not have direct evidence. Therefore, the police, have isolated them from each other, and offered them the same deal: if one testifies against the other, but he keeps silence, the first one is released for helping the investigation, and the second gets 10 years - the maximum term of imprisonment. If both are silent, their deed goes through a lighter article, and each of them are sentenced to a year in prison. If both testify against each other, each receives a minimum period of 2 years. Every prisoner chooses to keep quiet or testify against another. However, none of them knows exactly what the other will do. The Nash equilibrium in this game dictates players to testify against each other, although silence will be more beneficial for them.
Thus, the players’ egoism (the Nash equilibrium) in the Prisoner’s Dilemma leads them to the most unprofitable solution. This is the Tucker problem.
The opposite approach to the concept of equilibrium, based on altruism, was called the Berge equilibrium.
Definition 2
A strategy profile \(x^B=(x^B_1, \ldots ,x^B_N) \in X\) is called a Berge equilibrium (BE) in game (1), if for each \(x \in X\) the system of inequalities
is true.
The difference between Nash and Berge equilibria is that, in a Nash equilibrium, each player directs all efforts to increase its individual payoff as much as possible. The antipode of (2) is (3), where each player strives to maximize the payoffs of the other players, ignoring its individual interests. Such an altruistic approach is intrinsic to kindred relations and occurs in religious communities. The elements of such altruism show up in charity, sponsorship, and so on.
In Example 1, players receive the best result if they use the Berge equilibrium, thus the Berge equilibrium solves the Tucker problem in the Prisoner’s Dilemma (the prisoners choose to keep quiet).
Consider a special case of game (1) with two players, i.e., the game \(\varGamma \) where \(\mathbf {N} = {1, 2}\). Then a Berge equilibrium \(x^B = (x^B_1,x^B_2)\) is defined by the equalities
The Nash equilibrium \(x^e = (x^e_1,x^e_2)\) in this two-player game is given by the conditions
A direct comparison of these standalone formulas leads to the following result.
Property 1
The Berge equilibrium in game (1) with \(\mathbf {N} = \{1, 2\}\) coincides with the Nash equilibrium if both players interchange their payoff functions and then apply the concept of the Nash equilibrium to solve the game.
In view of Property 1, all results concerning the Nash equilibrium in the two-player game are automatically transferred to the Berge equilibrium (of course, with an “interchange” of the payoff functions as described by Property 1).
The differences appear when \(N \ge 3\). So, the Berge equilibrium may not exist in finite 3-person games. An example of this is given in [11]. The following example is taken from [11].
Example 2
Let us consider the following 3-person game in which each of the players has two pure strategies. Pure strategies of the first, the second, and the third player are denoted \(A_1\), \(A_2\); \(B_1\), \(B_2\); \(C_1\), \(C_2\), respectively.

The left-hand matrix refers to the pure strategy \(C_1\) of the third player, while the right-hand matrix refers to his/her pure strategy \(C_2\). Let us note that this game is a very special one. None of the players has any possibility to influence their own payoff, no matter if they use any of their pure or mixed strategies. On the contrary, players’ payoffs depend exclusively on the choices of the remaining players.
One can easily check that the second and the third players’ best support to any of the first player’s (pure or mixed) strategies is a pair of pure strategies \((B_1, C_1)\); the first and the third players’ best support to any of the second player’s (pure or mixed) strategies is a pair of pure strategies \((A_1, C_2)\); and finally, the first and the second players’ best support to any of (pure or mixed) strategies of the third player is a pair of pure strategies \((A_2, B_2)\). This game has no Berge equilibria, neither in pure, nor in mixed strategies.
Then, we recall the concept of Pareto optimality, and then formalize the Weak Berge Equilibrium.
Definition 3
The alternative \(x^{*}\) is a Pareto-optimal alternative in the N-criteria problem
if the system of N inequalities
with at least one strict inequality, is inconsistent.
The moral basis of following definition is the Hippocratic Oath “First do no harm!”
Definition 4
Let us call the strategy profile \(x^w=(x^w_1, \ldots ,x^w_n)\) a weak Berge equilibrium (WBE), if for each player i \((i \in \mathbf {N})\) strategy \(x^w_i\) is Pareto-optimal alternative in the \(N-1\)-criteria problem
Note that any BE is WBE. But the converse is not true, there are WBE that are not BE.
Let us compare the game \(\varGamma \) with an auxiliary game
where the set of players \(\mathbf {N}\) and the set of strategies \(X_i\) \((i \in \mathbf {N})\) are the same as in the game (1), and the payoff functions \(g_i(x)\) have the form
Lemma 1
The Nash equilibrium strategy profile in the game (4) is a weak Berge equilibrium strategy profile in the game (1).
Proof
Let \(x^e\) be a Nash equilibrium strategy profile in the game \(\tilde{\varGamma }\), i.e
With regard to (5), the inequality (6) can be rewritten as
Suppose \(x^e\) is not a WBE strategy profile, then there exists some number i for which the system of inequalities is consistent
of which at least one inequality is strict.
Adding inequalities (8), we obtain
that contradicts (7).
Remark 1
To construct a WBE strategy profile in the game (1), we can use the following algorithm:
-
1. to compose auxiliary game \(\tilde{\varGamma }\);
-
2. to construct a strategy profile \(x^e\) which is the Nash equilibrium strategy profile in the auxiliary game \(\tilde{\varGamma }\);
-
3. the found strategy profile \(x^e\) will be the WBE strategy profile in the original game \(\varGamma \).
As an example, let us consider the game “Snowdrift” which is proposed in [15].
Example 3
Let us consider the 3-person Snowdrift game which is shown in Table 1. The history of the game lies in the fact that A, B and C are the drivers of three cars, that stuck in a snowdrift at night, each of them has a shovel. If a solution is found for any one care, others can use it. Every driver chooses to dig or wait (in the hope that someone else will dig, or that a snowplow will come to the place of incident). Digging will cost 6 points, which are divided equally between those who perform the work; provided that there is at least one digger. If the players dug out by themselves of a snowdrift, then each player gets 4 points. Thus, if all three players dig, then everyone will get 2 points. If two players dig, they will get one point each, and the third player will earn 4 points. If one player digs, then his payoff will be negative (−2), and the payoffs of the remaining two players will be 4 points each. In the case that the players do not dig, but wait until the morning when the utilities arrive and clear the snow, their payoff will be zero.
Here, the 3-dimensional matrices A, B, C, which determine the payoffs of the players will be
The Nash equilibrium (NE) here will (wait, wait, wait) [15] with payoffs (0, 0, 0).
We will now compile an auxiliary game, the payoff matrices in which will be:
for the first player
for the second player
for the third player
The Nash equilibrium (NE) in the auxiliary game with matrices \(A^*\), \(B^*\), \(C^*\) will be (dig, dig, dig), respectively, the weak Berge equilibrium (WBE) in the original game will also be (dig, dig, dig) with payoffs (2, 2, 2).
Obviously, in this example, the WBE is more profitable for all players than the NE.
Remark 2
In the Snowdrift game, the Berge equilibrium (BE) [15] coincides with the WBE.
Follow to Lemma 1 and the sufficient conditions for the existence of a NE, it is easy possible to obtain sufficient conditions for the existence of a WBE under the usual restrictions for the game theory.
Theorem 1
In a non-cooperative N-person game \(\varGamma \) with a finite set of strategies, a weak Berge equilibrium strategy profile in mixed strategies exists.
Theorem 2
If in a non-cooperative N-person game \(\varGamma \), the sets of strategies \(X_i\) are convex compacts, and the payoff functions \(f_i(x)\) are continuous in the aggregate of variables, then in the game \(\varGamma \) a weak Berge equilibrium strategy profile in mixed strategies exists.
3 The WBE in a Finite 3-Person Game
Let us consider a non-cooperative 3-person game.
The strategy profile \(x^w =(x^w_1,x^w_2,x^w_3)\) is the WBE strategy profile, if and only if
-
1)
the strategy \(x^w_1\) is the Pareto-optimal alternative in the two-criterial problem
$$ \langle X_1, \{ f_2(x_1,x^w_2,x^w_3), f_3(x_1,x^w_2,x^w_3) \} \rangle ; $$ -
2)
the strategy \(x^w_2\) is the Pareto-optimal alternative in the two-criterial problem
$$ \langle X_2, \{ f_1(x^w_1,x_2,x^w_3), f_3(x^w_1,x_2,x^w_3) \} \rangle ; $$ -
3)
the strategy \(x^w_3\) is the Pareto-optimal alternative in the two-criterial problem
$$ \langle X_3, \{ f_1(x^w_1,x^w_2,x_3), f_2(x^w_1,x^w_2,x_3) \} \rangle . $$
Let us compose an axillary game for the game \(\varGamma _3\)
where, according to (5)
The NE strategy profile in \(\tilde{\varGamma }_3\) will be the WBE strategy profile in the original game \(\varGamma _3\).
Below, a finite non-cooperative 3-person game \(\varGamma _3\) is defined with three sets X, Y, Z of strategies of the first, second, and third player respectively, where \(X = \{ x=(x_1, \ldots ,x_m)^{T} \in \mathbf {R}^m \, : \, x^Te_m = 1, \, x\ge 0_m\},\) \(Y = \{ y=(y_1, \ldots ,y_n)^{T} \in \mathbf {R}^n \, : \, y^Te_n = 1, \, y\ge 0_n\}\), \(Z = \{ z=(z_1, \ldots ,z_l)^{T} \in \mathbf {R}^l \, : \, z^Te_l = 1, \, z\ge 0_l\}\), \(\omega =(x,y,z)\in \mathbf {R}^{m+n+l}\), together with their payoff functions as follows
Here, one has \((a_{ijk})\), \((b_{ijk})\), \((c_{ijk})\)—the players’ 3-dimensional payoff tables (without any loss of generality one can assume that all the entries of those tables are positive real numbers); the vector \(\omega ^T =(x^T,y^T,z^T)\), \(\omega \in \varOmega = X \times Y \times Z \subset \) \(\subset \mathbf {R}^{m+n+l}_{+}\). Next, for \(p = m, n, l\), we define the vectors \(0_p = (0, \ldots ,0)^T \in \mathbf {R}^{p}_{+}\), \(e_p = (1, \ldots ,1)^T \in \mathbf {R}^{p}\), as well as \(\mathbf {R}^{p}_{+}\)—the nonnegative orthant of the Euclidean space \(\mathbf {R}^{p}\). The symbol \(^{T}\) denotes the operation of transposition of a vector (matrix).
Following the algorithm in remark 1, we construct the functions (9).
Let us introduce the Nash function \(G(\omega ) = \delta _x(\omega ) + \delta _y(\omega ) + \delta _z(\omega )\), where
The function \(G(\omega )\) is an analogue of the Nash function defined for the bi-matrix games [16]. As the above–defined payoff functions are linear with respect to each variable x, y, z(when the other two variables are fixed), the auxiliary game \(\tilde{\varGamma }_3\) is convex, hence the set of Nash points \(\varOmega ^*\) is non-empty (but not necessarily convex).
Since \(G(\omega ) \ge 0\) for all \(\omega \in \varOmega \), and \(G(\omega ) = 0\) if, and only if \(\omega \) is the NE of the game \(\tilde{\varGamma }_3\), one can find the Nash equilibrium strategy profile of game \(\tilde{\varGamma }_3\) as the global minimum (equalling zero) of the function \(G(\omega )\) on \(\varOmega \).
Now we turn to the approximately numerical method for the construction of WBE in the game \(\varGamma _3\). In [12] this algorithm (3LP) approximately solving finite non-cooperative three-person games was proposed. The testing results illustrating the efficiency of the mentioned method’s application can be found in [13, 14].
The 3LP-Method for Solving the Finite 3-Persons Game
We denote \(\tilde{a}_{ijk} =b_{ijk} + c_{ijk}\), \(\tilde{b}_{ijk} = a_{ijk} + c_{ijk}\), \(\tilde{c}_{ijk} = a_{ijk} + b_{ijk}\) and \(d_{ijk} = \tilde{a}_{ijk} + \tilde{b}_{ijk} +\tilde{c}_{ijk} = 2(a_{ijk} + b_{ijk} + c_{ijk})\).
The iteration counter is set as \(t = 0\). As an starting strategy, one can use any pair of the players’ pure strategies (the total number of such pairs is \(mn + ml + nl\)); for example, fix the pair of strategies \(\{ y^{(0)}, z^{(0)} \}\) with the components \(y^{(0)}_1 =1\), \(y^{(0)}_j =0\) \((j=2,\ldots ,n)\), \(z^{(0)}_1 =1\), \(z^{(0)}_k =0\) \((k=2,\ldots ,l)\), and solve successively (for \(t = 0,1, \ldots \)) the triple problem \(P_x (x^{(t+1)},y^{(t)},z^{(t)})\), \(P_y (x^{(t+1)},y^{(t+1)},z^{(t)})\), \(P_z (x^{(t+1)},y^{(t+1)},z^{(t+1)})\), where
If \(x^*\) is an optimal solution to the problem \(P_x (x,y',z')\), then we set \(x' := x^*\). Then we solve:
Again, if \(y^*\) is an optimal plan for the above problem \(P_y (x',y,z')\), then put \(y' := y^*\), and continue solving:
Now that \(z^*\) is an optimal solution of the problem \(P_z (x',y',z)\), we denote \(z' := z^*\).
The optimal objective function values \(G_t = G(\omega ^{(t+1)})\) are monotone non-increasing by t. The iteration process continues until the value \(G_t\) stabilizes, that is, for some \(t^*\), the difference \(G_{t^*} - G_{t^*+1}\) becomes small enough. In addition, if \(G_{t^*}=0\), it means that an (exact) Nash point has been found. If the value \(G_{t^*}\) is positive but small enough, an approximate solution of the game is reported. Otherwise, a new pair of the initial strategies is selected and the process starts again (probably, having altered the order of the solved problems \(P_x\), \(P_y\), \(P_z\)).
Test Results for the 3LP-Algorithms for Finding the WBE
We tested the algorithms for finding the WBE in the finite 3-person games by using the personal computer with the processor Intel(R) Core(TM) i5-3427U (CPU @ 1.80GHz 2.300 GHz, memory 4.00 GB, 4 cores). The test codes were written in the MatLab. A series of 10 games was solved for each triple n, m, l.
We investigated 2 cases: independent matrices and mutually dependent matrices. In the first case (independent matrices) we used a pseudo-random counters to generate independently the elements of the tables \(a_{ijk}\), \(b_{ijk}\), \(c_{ijk}\) (\(1\le i \le m\), \(1 \le j \le n\), \(1 \le k \le l\)).
For the game with mutually dependent matrices, we first used pseudo-random counters to generate independently the elements of the auxiliary tables \(a'_{ijk}\), \(b'_{ijk}\), \(c'_{ijk}\) (\(1\le i \le m\), \(1 \le j \le n\), \(1 \le k \le l\)). At the second stage, we constructed the mutually dependent payoff tables by the formulas
for all \(1\le i \le m\), \(1 \le j \le n\), \(1 \le k \le l\), where \(0 < \lambda \le \frac{1}{2}\) is a covariance coefficient.
We solved games up to the dimension \(dim = m=n=k = 100\). For comparison, using the 3LP-algorithm, we calculated the NE for the same games.
The Table 2 presents the results of the 3LP-algorithm solving the set of test games (5 series with 10 instances in each) with independent matrices. The algorithm switched to the next initial pair of strategies after having made dim iterations.
In Table 2, the following notation is used: \(dim = m=n=k \) are the game’s sizes (dimension); NE—the number of initial (starting) point when searching for a Nash equilibrium; WBE—the number of start points when searching for a weak Berge equilibrium; tNE—the total amount of time to search a Nash equilibrium for the series of 10 games (sec); tWBE—the total amount of time to search a weak Berge equilibrium for the series of 10 games (sec).
In Table 3, for mutually dependent cases, the following notation is also used: \(dim = m=n=k \) are the game’s sizes (dimension); WBE—the number of start points when searching for a weak Berge equilibrium; tWBE—the total amount of time to search the WBE for the series of 10 games (sec); itn - the total number of steps of the 3LP algorithm. The covariance coefficient \(\lambda = 0,4\) was used in the calculation of Table 3.
For mutually dependent cases, the results are given only for the WBE, so when calculating the NE for these problems take an unacceptable time or they are not solved at all.
It is easy to notice from the reported results (see Table 2 and Table 3), the reciprocal dependence of the payoff matrices affect much to solve a problem by the 3LP-algorithm. The reciprocal dependence sufficiently increases the complexity of problems.
It is also clear that, the search for the WBE is much faster than the search for the NE. This is most likely due to the pure weak Berge equilibrium strategy profile existing more often than the pure Nash equilibrium strategy profile.
4 Conclusion
In this paper, we formalize the conception of the WBE. The WBE follows the Hippocratic oath “First do no harm!” In contrast to the NE, the WBE always exists for every finite N-person game. As an example, we find the WBE in the finite 3-person games using the 3LP-algorithm. In the future, the authors plan to transfer the proposed numerical algorithm for finding WBE to finite games of a larger (\(N = 4, 5\)) number of persons.
References
Nash, J.: Equilibrium points in N-person games. Proc. Nat. Acad. Sci. USA 36, 48–49 (1950)
Berge, C.: Théorie générale des jeux a n personnes. Gauthier-Villar, Paris (1957)
Shubik, M.: Review of C. Berge, General theory of \(n\)-person games. Econometrica 29(4), 821 (1961)
Zhukovskiy, V.I.: Some problems of non-antagonistic differential games. In: Mathematical Methods in Operations Research, Institute of Mathematics with Union of Bulgarian Mathematicians, Rousse, pp. 103–195 (1985)
Zhukovskii, V.I., Chikrii, A.A.: Linear-Quadratic Differential Games. Naukova Dumka, Kiev (1994). (in Russian)
Vaisman, K.S.: The Berge equilibrium for linear-quadratic differential game. In: Multiple Criteria Problems Under Uncertainty: Abstracts of the Third International Workshop, Orekhovo-Zuevo, Russia, p. 96 (1994)
Vaisman, K.S.: The Berge equilibrium. In: Abstract of Cand. Sci. (Phys. Math.) Dissertation St. Petersburg (1995). (in Russian)
Zhukovskiy, V.I., Kudryavtsev, K.N.: Mathematical foundations of the Golden Rule. I. Static case. Autom. Remote Control 78(10), 1920–1940 (2017). https://doi.org/10.1134/S0005117917100149
Larbani, M., Zhukovskii, V.I.: Berge equilibrium in normal form static games: a literature review. Izv. IMI UdGU 49, 80–110 (2017). https://doi.org/10.20537/2226-3594-2017-49-04
Kudryavtsev, K., Ukhobotov, V., Zhukovskiy, V.: The Berge equilibrium in Cournot oligopoly model. In: Evtushenko, Y., Jaćimović, M., Khachay, M., Kochetov, Y., Malkova, V., Posypkin, M. (eds.) OPTIMA 2018. CCIS, vol. 974, pp. 415–426. Springer, Cham (2019). https://doi.org/10.1007/978-3-030-10934-9_29
Pykacz, J., Bytner, P., Frackiewicz, P.: Example of a finite game with no Berge equilibria at all. Games 10(1), 7 (2019). https://doi.org/10.3390/g10010007
Golshtein, E.: A numerical method for solving finite three-person games. Economica i Matematicheskie Metody 50(1), 110–116 (2014). (in Russian)
Golshtein, E., Malkov, U., Sokolov, N.: Efficiency of an approximate algorithm to solve finite three-person games (a computational experience). Economica i Matematicheskie Metody 53(1), 94–107 (2017). (in Russian)
Golshteyn, E., Malkov, U., Sokolov, N.: The Lemke-Howson algorithm solving finite non-cooperative three-person games in a special setting. In: 2018 IX International Conference on Optimization and Applications (OPTIMA 2018) (Supplementary Volume). DEStech Transactions on Computer Science and Engineering (2018). https://doi.org/10.12783/dtcse/optim2018/27938
Sugden, R.: Team reasoning and intentional cooperation for mutual benefit. J. Soc. Ontol. 1(1), 143–166 (2015). https://doi.org/10.1515/jso-2014-0006
Mills, H.: Equillibrium points in finite games. J. Soc. Ind. Appl. Math. 8(2), 397–402 (1960)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Kudryavtsev, K., Malkov, U., Zhukovskiy, V. (2020). Weak Berge Equilibrium. In: Kochetov, Y., Bykadorov, I., Gruzdeva, T. (eds) Mathematical Optimization Theory and Operations Research. MOTOR 2020. Communications in Computer and Information Science, vol 1275. Springer, Cham. https://doi.org/10.1007/978-3-030-58657-7_20
Download citation
DOI: https://doi.org/10.1007/978-3-030-58657-7_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58656-0
Online ISBN: 978-3-030-58657-7
eBook Packages: Computer ScienceComputer Science (R0)